���ϼ���ǹ�����ϵĻ�������Ϣ��ģ�͡����ź�ģ�͵Ȼ���ͼ�۵�ϵͳ�ɲ���ģ��[3-7]Ϊ����ϵͳ�Ĺ��ϼ���ṩ����Ч����������ģ�ͳ������ͼ�۷��������ڼ����ԣ�����������Լ�������ϵ��ͼ�εķ�ʽ��ʾ�������ս����˹���-������ؾ����ö�ֵ�����Խ������ʵ���˶Թ��������ͳһ��������������������������****Χ�Ƹ���ϵͳ�ɲ��Է�����ơ��������ϵ���������������о�[4, 8-13]�����У����ɵ�[8]�����һ�ֻ�������ͼģ�͵�ģ�����������㷨�����㷨�������������������������Ŀռ������нǣ����ԼнǴ�С��Ϊ�ж����Ϸ��������ݣ��㷨����Ч���ں��칤������õ��˳�����֤�������㷨δ���ǹ�����Ϸ����ȼ������Σ������ڶ��ص��ע���ϵĿ���ɸ�飻�Կռ������нǴ�С��Ϊ�����ж�ָ����ʧ�˸����Դ�������Ĺ�����Ϣ����������Ͻ��۵ľ�ϸ�ȣ�������֧�ֶ����ָ��Ȩ�ص�����
�����ڿ��ǹ��ϲ��Դ������Ĺ��ϼ���ʺ����龯�������������һ�ֶ����ģ����Ϸ�����ͨ����������-������ؾ�������������IJ��Ա������ʾ������û�ɫ�����Ⱥ������ϲ��Խ��������������������Ľӽ��ȣ��ܿ��˹���������ʻ�ȡ�����⡣ʵ����������������[8]��ȣ����ķ�������ѡ���������ȷ�ʺ��ϸ����ʾ��ɴ�100%�����������ָ��Ȩ�ص�������Ͼ�ϸ�ȡ��ص��ע���ϼ���ȷ�����ָ��š�
1 ��ؾ������ɫ����ģ�� 1.1 ����-������ؾ��� ��ؾ���(�ֳ�����Ծ���)��һ�ֱ���2��������м���������ϵ����Ч������ͨ���������������(�ֳƹ۲�)�����ؾ��ɽ���ֱ���ж�ij�������Ƿ���������⡱ת��Ϊ���ж���õIJ��Խ�������Ƿ����ij���ϵ������������⡱��ʵ���˶�ϵͳ������ι��������ͳһ�����⡣����֤������ؾ������Ϊ��Ϣ�������źŵ�ͼ��ģ�ͽ��й�����ϵ���������[9]�����������ؾ���Ļ��������[14]��
����1??����ԣ���ָij����������һ����֮��������ϵ���������������ָ���Եģ�����x���Ƴ�y�����y��x��أ���x��y���Ի��ƣ���ƶ����ǻ���صġ�
����2??N����أ���ָ������������ϵ�Ľ��̶ܳȡ�������x��ֱ���Ƴ�y�����y��x 1����ء�����x���Ƴ�y������y���Ƴ�z�����z��xΪ2����أ�y��x��z��yΪ1����ء�ͬ�����Ƶ���������N����ع�ϵ��
����3??��ؾ����Ƿ�ӳ�������ȫ�����(�������������)��ϵ�IJ���������������ij�ж�����ij�ж�����أ��������Ӧ���е�Ԫ��ȡֵΪ1������Ϊ0��
����-������ؾ���DFT��ʽ(1) ��ʾ��
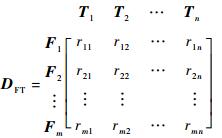 | (1) |
ʽ�У�F��ʾ����; T��ʾ����; r��ʾ��������Ե���ع�ϵ��������Fi�ɱ�����Tj���������Ԫ��rij=1������rij=0������������Fi=[ri1, ri2, ��, rin]TΪ�������������������˵�i�����Ϸ���ʱϵͳ��ȫ�����Ե�������֡�����������Tj=[r1j, r2j, ��, rmj]T�����˵�j�����Կɼ����ȫ�����ϣ���ӳ������ϼ��������
�������������ȫ�ɲ����������壬����-������ؾ����ֳ�֮Ϊ���������ڹ���Ӧ���У�ͨ����ϵͳ���пɲ��Խ�ģ����������-������ؾ��ɻ��ϵͳ��������Լ������������ϵ��
������һ����������ͼ������ϵͳ[15]ʾ��˵��DFT����Ľ���������
ͼ 1Ϊijϵͳ��������Ϣ��ͼ[15]��ͼ���Խڵ��ʾϵͳ�ĸ����ģ�飬������߱�ʾ�ڵ��Ĺ��ϴ�������ʾ���нڵ�5��10��11��12��14ͬʱ�����˲��Ա������ܣ���ȿɶԱ��ڵ�Ĺ��Ͻ��м�⣬Ҳ��ͨ�����������ж�ʵ�ֶ��¼��ڵ�Ĺ��ϱ��������統ͼʾ�Ľڵ�2����ʱ���ڵ�5��10��14������������ϵͳ���������ϱ������ֱܷ������˹���-���Ե�1����ؼ�N(N>1) ��������ԡ�ͨ������ϵͳ���нڵ㣬�ɽ�������-������ؾ������� 1��ʾ��
 |
| ͼ 1 ʾ��ϵͳ������Ϣ��ͼ Fig. 1 Directed information flow for sample system |
| ͼѡ�� |
�� 1 ʾ��ϵͳ��DFT���� Table 1 DFT matrix for sample system
| ���Ͻڵ� | ����/�����ڵ�� | ||||
| 1/5 | 2/10 | 3/11 | 4/12 | 5/14 | |
| 1 | 1 | 0 | 0 | 0 | 1 |
| 2 | 1 | 1 | 0 | 0 | 1 |
| 3 | 0 | 1 | 1 | 1 | 1 |
| 4 | 0 | 0 | 1 | 1 | 1 |
| 5 | 1 | 0 | 0 | 0 | 1 |
| 6 | 0 | 1 | 0 | 0 | 1 |
| 7 | 0 | 1 | 1 | 1 | 1 |
| 8 | 0 | 0 | 0 | 1 | 0 |
| 9 | 0 | 0 | 0 | 0 | 1 |
| 10 | 0 | 1 | 0 | 0 | 1 |
| 11 | 0 | 0 | 1 | 0 | 1 |
| 12 | 0 | 0 | 0 | 1 | 0 |
| 13 | 0 | 0 | 0 | 0 | 1 |
| 14 | 0 | 0 | 0 | 0 | 1 |
��ѡ��
1.2 ��ɫ�������� ��ɫ�������������ǻ�ɫϵͳ���۵�һ����Ҫ��֧�����ɵ˾�������������[16]���������������������ƶ����Ӱ��ϵͳ���������ؼ䲻����������½������ݹ�����������ɫ���������Ļ���˼���Ǹ���������������״�����Ƴ̶����жϲ�ͬ����֮�����ϵ�Ƿ���ܣ�����ʵ��˼·��ͨ�����Բ�ֵ�ķ�����ϵͳ���ص���ɢ��Ϊ�۲�ֵת��Ϊ�ֶ����������ߣ������������ߵļ������������ȹ����̶ȵ�ģ�͡���������״Խ�ӽ�����Ӧ����֮��Ĺ����Ⱦ�Խ��֮��ԽС[17]��
����1??��ɫ������������X0=(x0(1), x0(2), ��, x0(n))Ϊϵͳ������Ϊ���У���Xi=(xi(1), xi(2), ��, xi(n))(i=0��1, ��, m)Ϊ����������С�����ʵ����(x0(k), xi(k))����ʵ��

1) �淶�ԣ�0 < ��(X0, X1)��1����(X0, X1)=1?(X0=Xi)��
2) �ӽ��ԣ�|x0(k)��xi(k)|ԽС����(x0(k), xi(k))Խ��
�����������1) ��2) Ϊ��ɫ����������
����1??��ɫ�����ȡ���ϵͳ��Ϊ����Xi=(xi(1), xi(2), ��, xi(n))(i=1, 2, ��, m)����������(0, 1)����
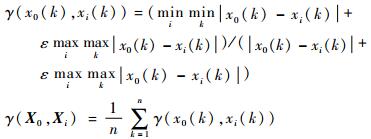 |
����(X0, Xi)�����ɫ����������������Ϊ�ֱ�ϵ������(X0, Xi)��ΪX0��Xi�Ļ�ɫ������(�ֳƵ��ϻ�ɫ������[16])��
����ϵͳ������϶��ԣ�ÿ�����϶�����Ϊһ��ϵͳ�������أ��Ҿ����ɲ��Կռ��е�һ�����б��������Ի���DFT����Ĺ�����������ڻ�ɫ�������������÷�Χ�ڡ�����1������1) ����ϵͳ���κ�2�����϶����������ϸ��صģ���ͬ���ϵIJ��Խ�����������ԡ�����1������2) ����������Զ��������ݡ�����1���������˷��Ϲ���1���Լ����һ����Ч��ʽ��
Ϊ�Ӳ��Կռ��������ϣ��ɽ�ʵ�ʵõ��IJ�������������ж�ӦΪϵͳ������Ϊ���У�����������������ӦΪϵͳ����������У��Դ˿������������������������Ĺ����ȡ���ɫ�������ڹ�������е�Ӧ���ڵ�2�ھ�����ܡ�
2 �����ģ����Ϸ��� ��ϵͳ������Ϲ����У�DFT����֧���ɲ��������������ϣ��������������Թ��ϵ�ȷʶ�𡣵���ʵ�ʹ����У������ڲ��Դ������������Լ�����Ӱ�죬���Բ��ܴﵽ��������״̬����������Ե�����ϵ�ɴ���4������IJ�ȷ���ԣ���������������P(tj|fi)����ʽ����˵����
1) P(tj=0|fi=0)������fi������������tj����������ʱtjָʾ��ȷ��
2) P(tj=1|fi=1)������fi����������tj��������ʱtj��ȷ����˹���fi��
3) P(tj=0|fi=1)������fi����������tj����������ʱtj©���˹���fi��
4) P(tj=1|fi=0)������fi������������tj��������ʱtj�鱨�˹���fi��
������2)~4) ������ֱ��ʾ���ԶԹ��ϵļ����ʡ�©����ʺ��龯���ʡ����ڲ���tj�����fi����ص������P(tj|fi)Ϊ0������P(tj|fi)ȡֵ��Ϊ0��
���ѿ��������Ա����ǹ�����ϵĴ����������Ӳ��Դ������Ĺ��ϼ����ʺ��龯����ָ�����ܹ���ȡ��ģ���Ĺ�����Ϣ�����һ�ȡ���Դ������ĸ������ݱ�֮����ϵͳ�Ĺ���������ʸ����ף�����ڲ��Կռ��Ͻ��й�����Ͼ��п����ԡ�
����Ӳ��Բ�ȷ���ԽǶ����¿��ǹ���������⣬�����˶����ģ����ϵľ������̣���ͼ 2��ʾ��
 |
| ͼ 2 �����ģ����ϵ�ʵʩ���� Fig. 2 Implementation process of multi-fault fuzzy diagnosis |
| ͼѡ�� |
�ڶ�ϵͳ���пɲ��Է���������DFT����ɻ���DFT�������Ա������ʾ���PAL=[pij]m��n���þ�������˲��Բ�ȷ��������Ӱ�죬����Ԫ��pij��ʾ����ֵ��PAL������幹�췽ʽΪ����DFT������rij=1��Ԫ���滻Ϊ����Tj�Թ���Fi�Ĺ��ϼ�����ֵ������rij=0��Ԫ���滻Ϊ����Tj�Թ���Fi�Ĺ����龯����ֵ��PAL���������������²��Դ������Թ����龯���ʶԷǹ��Ͻڵ���б��������Ρ�һ����˵����Ϣ��㼶���ݽ����¹���ģ������ǿ����������Ե���ؽ���NֵԽ���ڲ����龯�Ŀ�����Խ��Ϊ���ڹ���ʵ�ò����㣬��ѡ��ʽ(2)~ʽ(4) ����ĸ��·�����PAL�����и������龯����ֵ���и��¡�
 | (2) |
 | (3) |
 | (4) |
ʽ�У�����FAR��FAR��ֱ��ʾ����ǰ��ľ���Ԫ���й����龯���ʡ�
��ͳһ���ǵ�i���������������IJ����龯����ʱ�ɲ���ʽ(2) ���㣬��ͳһ���ǵ�j�����Զ��������ع��ϵ��龯����ʱ�ɲ���ʽ(3) ���㣬��ͳһ���������龯���ʲ�ѡȡ�����ֵʱ�ɲ���ʽ(4) ���㡣������ͼ 1��ʾ��ϵͳΪ�������谴ʽ(3) �������ݸ��¡��ڵ�3�ϵ����в���FARֵ��Ϊ�����PAL�������� 2��ʾ�����б���FDR��ʾ���ϼ����ʡ�
�� 2 ʾ��ϵͳ��PAL���� Table 2 PAL matrix of sample system
| ���Ͻڵ� | ����/�����ڵ�� | ||||
| 1/5 | 2/10 | 3/11 | 4/12 | 5/14 | |
| 1 | FDR11 | FAR32 | FAR33 | FAR34 | FDR15 |
| 2 | FDR21 | FDR22 | FAR33 | FAR34 | FDR25 |
| 3 | FAR31 | FDR32 | FDR33 | FDR34 | FDR35 |
| 4 | FAR31 | FAR32 | FDR43 | FDR44 | FDR45 |
| 5 | FDR51 | FAR32 | FAR33 | FAR34 | FDR55 |
| 6 | FAR31 | FDR62 | FAR33 | FAR34 | FDR65 |
| 7 | FAR31 | FDR72 | FDR73 | FDR74 | FDR75 |
| 8 | FAR31 | FAR32 | FAR33 | FDR84 | FAR35 |
| 9 | FAR31 | FAR32 | FAR33 | FAR34 | FDR95 |
| 10 | FAR31 | FDR10, 2 | FAR33 | FAR34 | FDR10, 5 |
| 11 | FAR31 | FAR32 | FDR11, 3 | FAR34 | FDR11, 5 |
| 12 | FAR31 | FAR32 | FAR33 | FDR12, 4 | FAR35 |
| 13 | FAR31 | FAR32 | FAR33 | FAR34 | FDR13, 5 |
| 14 | FAR31 | FAR32 | FAR33 | FAR34 | FDR14, 5 |
��ѡ��
����ϵͳ����ϵ�������ɻ���PAL���������������չ���Ա�������PEX���ٶ��������ϵ����{p, q}��������PAL�������²���1�����洢������ϵ�������������������p����q�����е�Ԫ�ذ����������Ƚϣ�ѡ��ֵ�ϴ�ķ�����չ�еĶ�Ӧλ�á�����������ʽ������������Ͼ��������ԡ��ڲ����Ƕ���ϲ�������ֹ������������������£�m������������2m��1�ֹ�����ϣ����ǵ�ʵ��ϵͳ�Ĺ��϶༯���������ؼ��ڵ��ϣ�����������չ��ľ����趨��������ȼ����½��й���������(���ȼ�Խ�ߣ�������к�ԽС)�����ɵõ�PEX��������PEX���������ʵ�ֶ��ص��ע���ϵ���ϣ�����������Ч�ܡ�
������ 2������PAL����ʾ��������ڵ��˳��Ϊ������ȼ��������ȼ��ߵĽڵ��FDRֵ�ϴ��ڿ�����������ϲ���������£��ɹ������� 3��ʾ��PEX����ʾ����
�� 3 ʾ��ϵͳ��PEX���� Table 3 PEX matrix of sample system
| ���Ͻڵ� | ����/�����ڵ�� | ||||
| 1/5 | 2/10 | 3/11 | 4/12 | 5/14 | |
| 1 | FDR11 | FAR32 | FAR33 | FAR34 | FDR15 |
| 1, 2 | FDR11 | FDR22 | FAR33 | FAR34 | FDR15 |
| 1, 3 | FDR11 | FDR32 | FDR33 | FDR34 | FDR15 |
| �� | �� | �� | �� | �� | �� |
| 1, 14 | FDR11 | FAR32 | FAR33 | FAR34 | FDR15 |
| 2 | FDR21 | FDR22 | FAR33 | FAR34 | FDR25 |
| 2, 3 | FDR21 | FDR22 | FDR33 | FDR34 | FDR25 |
| �� | �� | �� | �� | �� | �� |
| 2, 14 | FDR21 | FDR22 | FAR33 | FAR34 | FDR25 |
| �� | �� | �� | �� | �� | �� |
| 13 | FAR31 | FAR32 | FAR33 | FAR34 | FDR13, 5 |
| 13, 14 | FAR31 | FAR32 | FAR33 | FAR34 | FDR13, 5 |
| 14 | FAR31 | FAR32 | FAR33 | FAR34 | FDR14, 5 |
��ѡ��
�ӿռ�ͶӰ�ǶȽ�������PEX������й���ģ����ϵ�ʵ����ȷ���ĸ������ڲ��Կռ��ͶӰ����(��ӳ�˹�������)��ʵ�����������ӽ��������Ի�ɫ����������Ϊ��������ʵ��������T��ù�����������F�ӽ��̶ȵ�ָ�꣬��ֵԽ����Ͻ��Ϊ���������ϡ��Ŀ��Ŷ�Խ�ߡ��ٶ���ʵ��������ΪX0(����Ԫ��ֵΪ1��0���ֱ��ʾ����������������)��PEX����ij�еĹ�����������ΪXi�����������ɫ���������ļ��㲽�衣
����1??��X0����Ԫ�ؽ��з��㻯��������X0=(x0(1), x0(2), ��, x0(n))��?x0(j)=0����x0(j)=0.01, j=1, 2, ��, n��
����2??�Ը�����Xi���г�ֵ��һ������

����3??��X��0��X��i��Ӧ����֮��ľ���ֵ���У��Ǧ�i(k)=|x��0(k)��x��i(k)|����i=(��i(1), ��i(2), ��, ��i(n)), i=1, 2, ��, m��
����4??��i(k)��Xiȫ���з�Χ�ڵ����ֵ����Сֵ���ֱ��Ϊ
����5??��������Ԫ�صĹ���ϵ������
����6??������X��0��X��i(����X0��Xi)��Ĺ����ȣ�
�Ը�����Xi����ֵ��һ�������ɽ�������Ԫ�ؾ�ת��Ϊ��ֵ�ɱȵ����������ݣ����ں��������������X0����Ԫ�������㻯�����ɷ�ֹ���г�ֵ��һ��ʱ��ĸΪ0�����Ľ�����ֵѡȡΪ0.01������ɼ������ķ��Ÿı�ͷ����ԡ�����M��m����������ʹ�ù���ϵ�������ж�ֱ����ԣ��ɸ��ݸ�����Ԫ�ص�ʵ��ȡֵ���������Ͼ��ȵ��š�ͨ������£�M��mȡֵ��ֱ�Ӹ����Ե�FDR��FAR�в����������빤��ʵ�ʲ�������ʱ��ȡֵ�Ĵ�С����ӳFDR��FAR2�������ڹ�������е�Ȩ�ط��䡣
��Ҫ˵�����ǣ����ǵ�����FDR��FAR�Ĺ�����Ͼ���һ����ģ���ԣ���ʵ��Ӧ���У��ɰ��ɻ�ɫ�����������ȡֵ�ݼ��Ĵ���ѡȡn�����ϻ�������״̬��ѡ���Դ���������ȷ�ʡ����⣬ǰ�ڹ����漰��ϵͳ������ģ�͡�����ȷ���Ը���ͳ�ƾ��������ǰ�������巽���ɲμ�������ף����IJ�������
3 Ӧ��ʵ�������� ���������ɴ�����ǰϵͳ״̬[18]Ϊ��˵��������Ϸ�������Ч�ԡ���ϵͳ������10������״̬��15�����Ϲ۲���������佨����DFT�������� 4��ʾ��
�� 4 �����ɴ�����ǰϵͳ״̬DFT���� Table 4 System state matrix DFT before launch of Apollo spacecraft
| ���Ͻڵ� | ���Խڵ� | ||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
| 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 |
| 2 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 |
| 3 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 1 |
| 4 | 0 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 |
| 5 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 0 |
| 6 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 |
| 7 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 1 | 0 | 1 |
| 8 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 0 |
| 9 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 |
| 10 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 0 |
��ѡ��
Ϊ�˱��ڽ���Ƚ�, ���IJ���������[8]��ͬ��ʵ��������
1) ��������������ϼ����ʾ�Ϊ90%���龯���ʾ�Ϊ1%��
2) ���贫��������Ϊ����״̬����PEX�������������Ϊ��������������
3) ����ϵͳ���ͬʱ����2�����ϣ���PEX������55����������������
4) ��ѡ��Ͻ����а�����������ƹ�����nȡֵΪ3��
��һ���أ����Ľ�����״̬��Ŵ�����Ϊ����������ȼ�����ѡ��ʽ(4) ������PAL��PEX���������ֵ���£����������в��Ե�FARֵ��Ϊ1%�����⿼��FDR��FAR��Ӱ��Ȩ�أ�ѡȡ��ɫ�����ȷֱ�ϵ����=0.5����������[8]�����ͱ��ķ�����ʵ�����Ƚ����� 5��ʾ����Ҫ˵�����ǣ�����2�ַ������õ����ָ��(���ƶ���ӽ���)֮�䲢����ֵ�Ƚ����塣
�� 5 �������������µ���Ͻ�� Table 5 Diagnosis results under ideal input condition
| ����״̬ | ���������� | ����[8]������Ͻ��� | ���ķ�����Ͻ��� | |||||||
| ������� | ������� | ����о� | �оݽ�� | ������� | ������� | ����о� | �оݽ�� | |||
| 1 | 4, 8, 10, 11, 12, 13 | ����� | 1 | ���ƶ� | 0.996 3 | ����� | 1 | �ӽ��� | 0.933 3 | |
| �ο��� | 1, 2 | ���ƶ� | 0.906 9 | �ο��� | 1, 2 | �ӽ��� | 0.805 3 | |||
| �������� | 1, 7 | ���ƶ� | 0.906 9 | �������� | 1, 6 | �ӽ��� | 0.762 6 | |||
| 3 | 5, 6, 7, 9, 10, 11, 12, 15 | ����� | 3 | ���ƶ� | 0.997 8 | ����� | 3 | �ӽ��� | 0.911 1 | |
| �ο��� | 2, 3 | ���ƶ� | 0.946 1 | �ο��� | 2, 3 | �ӽ��� | 0.825 7 | |||
| �������� | 3, 4 | ���ƶ� | 0.946 1 | �������� | 3, 4 | �ӽ��� | 0.825 7 | |||
| 5 | 2, 4, 6, 7, 8, 9, 10, 13, 14 | ����� | 5 | ���ƶ� | 0.998 3 | ����� | 5 | �ӽ��� | 0.900 0 | |
| �ο��� | 4, 5 | ���ƶ� | 0.973 2 | �ο��� | 4, 5 | �ӽ��� | 0.857 3 | |||
| �������� | 1, 5 | ���ƶ� | 0.951 4 | �������� | 1, 5 | �ӽ��� | 0.814 6 | |||
| 7 | 1, 4, 5, 8, 11, 13, 15 | ����� | 7 | ���ƶ� | 0.997 2 | ����� | 7 | �ӽ��� | 1.000 0 | |
| �ο��� | 1, 7 | ���ƶ� | 0.939 5 | �ο��� | 1, 7 | �ӽ��� | 0.997 1 | |||
| �������� | 7, 9 | ���ƶ� | 0.939 5 | �������� | 7, 9 | �ӽ��� | 0.997 1 | |||
| 9 | 1, 4, 5, 12, 14, 15 | ����� | 9 | ���ƶ� | 0.996 3 | ����� | 9 | �ӽ��� | 1.000 0 | |
| �ο��� | 2, 9 | ���ƶ� | 0.931 1 | �ο��� | 2, 9 | �ӽ��� | 0.997 1 | |||
| �������� | 4, 9 | ���ƶ� | 0.906 9 | �������� | 4, 9 | �ӽ��� | 0.995 7 | |||
| 2, 4 | 2, 3, 5, 6, 7, 11, 12, 14, 15 | ����� | 2, 4 | ���ƶ� | 0.998 3 | ����� | 2, 4 | �ӽ��� | 0.900 0 | |
| �ο��� | 3, 8 | ���ƶ� | 0.932 5 | �ο��� | 2, 3 | �ӽ��� | 0.781 4 | |||
| �������� | 2, 3 | ���ƶ� | 0.925 8 | �������� | 3, 4 | �ӽ��� | 0.781 4 | |||
| 4, 6 | 2, 4, 5, 6, 7, 8, 9, 10, 12, 13, 14, 15 | ����� | 4, 6 | ���ƶ� | 0.999 4 | ����� | 4, 6 | �ӽ��� | 0.866 7 | |
| �ο��� | 5, 6 | ���ƶ� | 0.999 4 | �ο��� | 5, 6 | �ӽ��� | 0.866 7 | |||
| �������� | 3, 5 | ���ƶ� | 0.980 0 | �������� | 3, 5 | �ӽ��� | 0.824 0 | |||
| 6, 8 | 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15 | ����� | 6, 8 | ���ƶ� | 1.000 0 | ����� | 6, 8 | �ӽ��� | 1.000 0 | |
| �ο��� | 3, 10 | ���ƶ� | 0.986 3 | �ο��� | 3, 10 | �ӽ��� | 0.998 6 | |||
| �������� | 6, 10 | ���ƶ� | 0.986 3 | �������� | 6, 10 | �ӽ��� | 0.998 6 | |||
| 8, 10 | 1, 2, 3, 4, 6, 7, 9, 10, 11, 13, 14 | ����� | 8, 10 | ���ƶ� | 0.999 1 | ����� | 8, 10 | �ӽ��� | 1.000 0 | |
| �ο��� | 5, 8 | ���ƶ� | 0.978 1 | �ο��� | 5, 8 | �ӽ��� | 0.998 6 | |||
| �������� | 5, 10 | ���ƶ� | 0.978 1 | �������� | 5, 10 | �ӽ��� | 0.998 6 | |||
| 1, 10 | 1, 2, 3, 4, 7, 8, 10, 11, 12, 13, 14 | ����� | 1, 10 | ���ƶ� | 0.999 1 | ����� | 1, 10 | �ӽ��� | 1.000 0 | |
| �ο��� | 1, 8 | ���ƶ� | 0.959 6 | �ο��� | 1, 8 | �ӽ��� | 0.997 1 | |||
| �������� | 6, 10 | ���ƶ� | 0.943 0 | �������� | 2, 10 | �ӽ��� | 0.995 7 | |||
��ѡ��
ʵ�������������ķ�������ѡ���������ȷ�ʺ��ϸ����ʾ��ɴﵽ100%��������[8]��ȣ����ķ��������·�������ر����ƣ�
1) ֧��ͨ���ı��ɫ�����ȷֱ�ϵ����ֵ������FDR��FARֵ������е�Ȩ�ء��Ը���ϵͳ���ԣ��ڲ�ͬ���������»�õIJ���ָ��FDR��FAR�Ŀ��Ŷ�Ҳ�����ڲ�ȷ���ԡ��ڿ���FDRֵ����FARֵ������£����϶����Ե�FDRֵ������ʱ��������ȡֵ����0.5�����϶����Ե�FARֵ������ʱ��������ȡֵС��0.5����������ȡֵ����0.5���������� 5�еĹ���״̬5Ϊ��������ȡֵ�ֱ�Ϊ0.1, 0.5, 0, 9����������ʵ���������䣬�ɻ����ͼ 3��ʾ����ֵ����ֲ������У�����Ϊ��ɫ��������ֵ���������������ִ����������Եݼ������������Ͻ��۴���N������NֵΪ1��2��3������ֱ��Ӧ��1������ۡ������-����5������2������ۡ��ο���-����4��5������3������ۡ���������-����1��5����
 |
| ͼ 3 ��ͬ��ȡֵ����¹���״̬5�Ļ�ɫ������ Fig. 3 Grey correlation degrees of fault state 5 at different �� values |
| ͼѡ�� |
ͼ 3�����ݱ�������ͬʵ�������£���Ͻ��۵���ֵ����ȡֵ�����ϱ���Ϊ��������ϵ������FDR��Ȩ��Խ��(���϶��������)����ϻ�õ���ֵ��Խ������1�ƽ�����֮������ȡֵԽС����һ�������֪������������ͬȡֵ��δ����Ͻ�����ȷ�ó����Ӱ�졣�ɱ������Ϊ������Ա���ж����ģ������ṩ��һ��������ԣ����ڲ�ȷ�����ؽ϶�ĸ���ϵͳ���ԣ�֧�����ָ��Ȩ�ض�̬�����Ƿdz���Ҫ�ġ�����[8]�л��ڿռ�������нǵļ��㷽ʽ������ù̶�ֵ�����߱�Ȩ�ص������ԡ�
2) ͬ�������£����ķ����Ĺ�����Ͼ�ϸ�ȸ��š�����ϸ�����n��������ƹ���״̬����Ϊ����ά������ֱ�Ӳο����ʿ�ͨ��ָ�ꡰά������ȷ��SCR������Ͼ�ϸ�Ƚ��н�����������ۡ����Ķ���DFT�����и���������Ӧ�Ĺ���Ϊ��Ԫ���ϡ���PEX�����е���Ϲ��Ͼ��ɷֽ�ΪԪ���ϣ���ɵõ���ʽ(5) ��ʾ��SCR��ʽ��
 | (5) |
ʽ��:NfΪʵ�ʷ�����Ԫ��������; NsΪ��ϸ�����n��������ƹ����а�����Ԫ����������ʵ��Ӧ���У�ϵͳά����Աֻ���Ų�Ns��Ԫ���ϼ�����ɶ�n��������ϵĸ��ǡ����� 5�еĹ������(6��8) Ϊ������֪��NfֵΪ2��NsֵΪ4��SCRֵΪ50%��
 |
| ͼ 4 �� 5�й���״̬��SCRȡֵ Fig. 4 SCR values of fault states in Table 5 |
| ͼѡ�� |
ͼ 4�������� 5���г���ȫ������״̬��SCRֵ��������������ķ���������[8]�������ָ��š�
3) ���IJ��ù�����ϴ���ּ��IJ��ԣ�ͬ�������£�֧�ֽ��ص��ע�������ȼ�����빤���жԹ��ϰ�Ӱ��ȷּ���˼·���Ǻϡ��ڸ���ϵͳ���������Ŀ�Ӵ�����ϻ������Ͼ���ͬ�����Ƴ̶ȵ�����£����ķ��������ȼ�����ʽ������[8]������ѡ��������ʽ��ȣ����и��ߵĹ��ϼ�����Ų�Ч�ʡ�һ��ֱ�۵��������� 5�еĹ������(1��10)�����ļ���õ��ӽ���ȡֵͬΪ0.995 7�����ƹ��Ϲ���5�������� 6��ʾ����ʵ���������趨��������ȼ������ķ�������ѡɸѡ��������2(���ȼ��ϸ�)�Ĺ�����ϡ�����֤������������ȼ��ı�ʱ�������Թ���״̬��š�������Ϊ������ȼ������ķ���ɸ�����ص��ע����ʵ�������������ࡣ
�� 6 �������(1, 10) �Ľӽ�����ֵ���ѡ��Ͻ���ʾ�� Table 6 Example of approximate measurement value and candidate diagnosis result of fault combination (1, 10)
| �ӽ�����ֵ | ��ѡ��Ͻ���(���ƹ���/�������) | ||||
| 0.995 7 | 2, 10 | 5, 8 | 5, 10 | 6, 10 | 10 |
��ѡ��
������ԣ�������������-���Լ���ϵ�ʵ�鳡�������ķ����ѱ��ֳ�����С�������ݵĶ���������ƣ��ڶ������ϡ���ʵ��������������½��ɻ�ø��ŵ���Ͻ������Ϊ����ϵͳ�Ķ����ģ������ṩ�µĽ��˼·��
4 ���� 1) ���ķ��������ȡ����ϵͳ������ϸ��ʼ�����ɲ��Բ�ȷ���������¶����ģ����ϡ�
2) ���ķ�����ͨ���ı��ɫ�����ȷֱ�ϵ��֧�����ָ��Ȩ�ض�̬������Ϊ����ʵ���ж����ģ������ṩ������ԡ�
3) ���ķ���������[8]�������ܱ����൱�������ڵ����Ϻ�˫�����������£���ѡ���������ȷ�ʼ����ϸ����ʾ��ɴ�100%�������ķ������и��ŵ���Ͼ�ϸ�ȼ��ص��ע����ɸѡЧ����
�����
| [1] | HASHTRUDIZAD S, KWONG R H, WONHAM W M. Fault diagnosis in discrete-event systems:Framework and model reduction[J].IEEE Transactions on Automatic Control, 2003, 48(7): 1199�C1212.DOI:10.1109/TAC.2003.814099 |
| [2] | ����, ʯ����. ϵͳ��������Ʒ�������֤[M].����: �������պ����ѧ������, 2003: 4-8. TIAN Z, SHI Z Y. System testability design analysis and verification[M].Beijing: Beihang University Press, 2003: 4-8.(in Chinese) |
| [3] | DE PAUL R.A logic modeling as a tool for testability[C]//Proceedings of IEEE International Automatic Testing Conference.Piscataway, NJ:IEEE Press, 1985:203-207. |
| [4] | DEB S, PATTIPATI K R, RAGHAVAN V. Multi-signal flow graphs:A novel approach for system testability analysis and fault diagnosis[J].IEEE Aerospace & Electronic Systems Magazine, 1995, 10(5): 14�C25. |
| [5] | RAO N S V. On parallel algorithms for single-fault diagnosis in fault propagate on graph systems[J].IEEE Transactions on Parallel and Distributed Systems, 1996, 7(12): 1217�C1223.DOI:10.1109/71.553268 |
| [6] | KOKAWA M, MIYAZAKI S, SHINGAI S. Fault location using digraph and inverse direction search with application[J].Automatic, 1983, 19(6): 729�C735.DOI:10.1016/0005-1098(83)90039-0 |
| [7] | ����, �г���, �����, ��. ��β�����ģ�͵���������[J].�������պ����ѧѧ��, 2015, 41(1): 90�C95. YIN Y W, SHANG C X, MA Y H, et al. Method of testability evaluation using hierarchical testability model[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1): 90�C95.(in Chinese) |
| [8] | ����, �ƽ���, ����. һ�ֻ�������ͼģ�͵�ģ�����������㷨[J].ϵͳ��������Ӽ���, 2008, 30(3): 568�C571. LIAN K, HUANG J G, LONG B. Fuzzy multiple fault diagnosis algorithm based on digraph models[J].Systems Engineering and Electronics, 2008, 30(3): 568�C571.(in Chinese) |
| [9] | ����, ��, ���ھ�. ������չ�Ĺ���ģ�͵IJ����Է��������о�[J].ϵͳ��������Ӽ���, 2008, 30(2): 371�C374. YANG P, QIU J, LIU G J. Research on extended dependency model-based testability analysis[J].Systems Engineering and Electronics, 2008, 30(2): 371�C374.(in Chinese) |
| [10] | ��ˬ, �ھ���, ��ݶ��, ��. ���ڶ��ź���ͼ���֧�����㷨�Ĺ������[J].�������պ����ѧѧ��, 2016, 42(1): 180�C186. LIANG S, YU J S, TANG D Y, et al. Research on fault diagnosis based on multi-signal flow graph and branch and bound algorithm[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(1): 180�C186.(in Chinese) |
| [11] | ������, Ф����, ��ѧ��, ��. ���Բ��ɿ������¶������Ϸ���[J].�������պ����ѧѧ��, 2011, 37(4): 433�C438. FANG J Y, XIAO M Q, WANG X Q, et al. Multiple fault diagnosis method with unreliable test[J].Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(4): 433�C438.(in Chinese) |
| [12] | ����, �ھ���, ��ݶ��, ��. ͼģ����ѧϰ�㷨��ϵı�Ҷ˹�����Զ���ģ[J].�������պ����ѧѧ��, 2016, 42(7): 1486�C1493. SHEN L, YU J S, TANG D Y, et al. Automatic learning of Bayesian network structure using graph model and learning algorithm[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7): 1486�C1493.(in Chinese) |
| [13] | SHAKERI M, RAGHAVAN V, PATTIPATI K R, et al. Sequential testing algorithms for multiple fault diagnosis[J].IEEE Transactions on Systems, Man and Cybernetics, 2000, 30(1): 1�C14. |
| [14] | U.S.Department of Defense.Basic dependency modeling terminology[EB/OL].Washington, D.C.:Office of the Secretary of Defense, DoD, 2008(2008-06-16)[2016-09-02].http://www.testability.com/Reference/Glossaries.aspx?Glossary=DependencyModeling. |
| [15] | CHESSA S, SANTI P. Operative diagnosis of graph-based systems in multiple faults[J].IEEE Transactions on Systems, Man and Cybernetics, 2001, 31(2): 112�C119.DOI:10.1109/3468.911368 |
| [16] | DENG J L. Introduction to grey system theory[J].Journal of Grey System, 1989, 1(1): 1�C24. |
| [17] | ��˼��, ��Ӣ��, ������, ��. ��ɫϵͳ���ۼ���Ӧ��[M].����: ��ѧ������, 2014: 63-75. LIU S F, YANG Y J, WU L F, et al. The grey system theory and its application[M].Beijing: Science Press, 2014: 63-75.(in Chinese) |
| [18] | WOHL J G. Information automation and the Apollo program:A retrospective[J].IEEE Transactions on Systems, Man and Cybernetics, 1982, 12(4): 469�C478.DOI:10.1109/TSMC.1982.4308851 |
