常用的几何外形参数化方法包括非均匀有理B样条 (NURBS) 方法[1-3]、形状类别函数法 (CST)[4-6]和自由型面变形 (FFD) 技术[7-18]等。FFD技术普适性好,近年来广泛应用于气动外形优化等领域。通常,几何外形由表面网格代替,但表面网格点由于数量太多,以及移动后外形几何连续性难以保证,一般不能直接作为设计控制点。
FFD技术可实现使用控制点参数化几何外形和间接变形表面网格,且变形后能有效保证飞行器外形的几何连续性。近年来,FFD在飞行器气动优化的应用中涵盖了从翼型到全机的优化设计。例如,陈颂等[7]、Amoiralis和Nikolos[8]将FFD技术应用于翼型设计;李彬[9]、王丹[10]、王元元[11]、黄江涛[12]等分别结合FFD技术实现了机翼、翼身组合体、机身后体和翼梢小翼的优化设计;Ronzheimer[13]、Li[14]等应用FFD技术对发动机吊舱进行了优化;王婧超等[15]采用FFD技术对涡轮叶片进行了优化设计;Kenway和Kennedy[16]、唐静等[17]、Lyu和Martins[18]分别使用FFD技术对运输机和飞翼进行了全机优化设计。
FFD技术首先由Sederberg和Parry[19]提出并应用于几何造型,该方法基于Bernstein多项式并采用三方向张量积形式的控制体,能产生很大程度的变形,但移动每个控制点都会产生全局变形。Lamousin和Waggenspack[20]提出了基于NURBS的FFD (NFFD) 技术,实现了控制点影响区域的局部化。近年来,为克服FFD技术间接变形不直观的弱点,Yamazaki[21]和陈颂[7]等初步开展了直接操作的FFD (DFFD) 技术在优化设计中的应用,DFFD技术需要求解与控制点数量相等规模的方程组,计算效率等还有待进一步提高。
NURBS求值算法和局部参数反求算法是影响NFFD计算稳定性和速度的2个关键算法。一种鲁棒快速的求值算法是Deboor算法[22]。黄江涛等[12]将反求参数转化为优化问题。唐静等[17]采用二阶收敛速度的Newton迭代方法,构造了反求参数的牛顿迭代式,给出了求解雅可比矩阵的变步长有限差分方法和计算迭代初值的控制体子格插值方法,具有良好的收敛性和鲁棒性。
数值优化过程中,解决变形物面后的网格匹配问题时通常使用动网格技术,包括代数法、偏微分方程法和虚拟结构法,其计算代价由低到高,相应适用的变形量由小到大。本文充分发挥NFFD控制点影响区域局部性的优势,通过扩展控制体和合理选择控制点实现了物面网格和空间网格同步变形。
由于NFFD属于间接变形技术,控制点选择和分布等因素对变形结果都有影响,但其对数值优化结果的影响并不直观。Amoiralis和Nikolos[8]比较了B样条和NFFD 2种参数化方法在翼型反设计中的应用,表明NFFD具有更快实现目标翼型的能力。NFFD方法已广泛应用于飞行器气动外形优化,但很少有人研究控制点选择及分布等因素对优化过程收敛性和最终优化效果的影响。
本文拓展NFFD技术,通过对控制体的扩展,使NFFD技术同时实现了数值优化过程中物面参数化、表面网格变形和空间网格变形。通过从翼型NACA0012到翼型EH1590的反设计,研究控制点分布对数值优化结果及收敛性的影响。通过飞翼标模的全机优化设计,进一步研究三维情况下控制点分布对优化结果的影响。
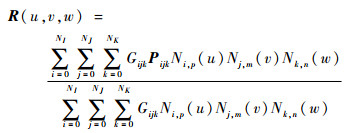
1 NFFD变形物面和变形空间网格 NFFD技术及相关算法、并行实现方法的详细内容见文献[17],此处作简要介绍。NFFD定义了从控制体内局部坐标系到全局坐标系的坐标映射,三维情况时可表示为
 | (1) |
式中:R为网格点坐标;Pijk为控制点坐标;Gijk为对应的权值;NI、NJ和NK分别表示空间3个方向上控制点数目;Ni, p(u)、Nj, m(v) 和Nk, n(w) 为3个方向上基函数;p、m和n为相应方向上基函数次数;(u, v, w) 为控制体内的局部坐标。
使用时需要将物体嵌入控制体内,即已知网格点坐标值反求其局部坐标,如图 1(a)所示,其中内部曲线为翼型,外部方框为控制体。
 |
| 图 1 变形前后控制体和翼型 Fig. 1 Control volume and airfoil before and after deformation |
| 图选项 |
变形物体是通过改变控制体来间接实现,通常采用移动控制点的位置来变形控制体,使用式 (1) 求物体变形后网格点的新位置,如图 1(b)所示。
本文NURBS求值使用Deboor算法[22],反求参数使用Newton迭代方法[17]。
当控制体的控制点分布给定后,NFFD变形嵌入物体的效果与控制点位置及权值、基函数次数和节点向量取值都有关系。
控制点权值越大,该控制点对物体变形控制能力越强。由式 (1) 可知,控制点某个方向坐标变化只引起嵌入物体相同方向上坐标变化,即变形量3个方向不耦合。该性质有利于外形优化时对单个方向变形的控制。如果将控制点权值作为设计变量,3个方向的变形将发生耦合,因此在外形优化设计中,控制点权值一般不作为设计变量,在优化过程中保持不变。
嵌入控制体内物体的变形量是由控制点的变形量按其影响因子加权得到,离待变形物体距离越近的控制点其影响因子越高。基函数的次数越高,控制点的影响区域就越大,参与加权的控制点就越多。图 2(a)所示为初始翼型及其二维控制体,垂直翼型v方向基函数次数取1,顺翼型u方向次数分别取1、2、3和4,移动中间位置的控制点P后,翼型形状变化如图 2(b)所示。基函数为4次时,翼型变化的范围最大 (前后可达d点位置),但翼型跟随控制点移动的几何改变量最小 (即变形跟随性最差)。基函数为1次时,翼型形状只在前后a点范围内线性变化,跟随性最好,但变形后翼型曲线导数不再连续,不能用于气动优化。工程上常用的3次基函数B样条,可以保证变形后外形3阶导数连续。
 |
| 图 2 不同基函数次数时翼型变形 Fig. 2 Airfoil deformation of different basis function degrees |
| 图选项 |
从图 2(b)还可以看出,控制点P移动后,翼型发生明显变形的区域为前后b点范围内 (图中虚线方框内)。同时,翼型下表面点1附近也发生变形,要使下表面不受P点控制,在保持v方向基函数次数取1时,增加一排控制点即可,如图 3所示。
 |
| 图 3 修改后的控制体和变形后的翼型 Fig. 3 Modified control volume and deformed airfoil |
| 图选项 |
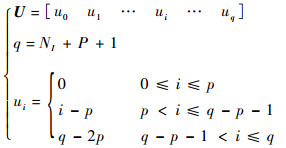
节点向量常采用两端重复、中间均匀递增型节点值,以u方向为例,节点向量定义为
 | (2) |
NFFD控制点组成的凸包多面体和其定义的控制体形状通常不同,控制体是凸包多面体的一个子集。二维时,每个方向的节点向量都类似式 (2),两端重复取值可以使得定义的控制曲面过4个角点控制点,如图 4所示,三维时定义的控制体过8个角点。一般情况下,除了角点外,定义的控制体不能保证过其他表面控制点。特殊地,当最外层控制点在各方向上分别共面时,定义的控制体形状与控制点组成的六面体相同。
 |
| 图 4 二维NFFD控制点和其定义的控制曲面 Fig. 4 2D control points and control surface of NFFD |
| 图选项 |
应用于CFD外形优化时,NFFD直接参数化表面网格 (几何外形) 后,通过改变控制点坐标改变几何形状。将表面网格点和体网格点嵌入到相同的控制体内,在变形表面网格同时实现空间网格的协调变形,则优化过程中不再需要其他体网格处理技术,如动网格技术。
要保证体网格协调变形且不出现负体积等问题,首先基函数需要有2次 (3阶) 以上的连续性,保证控制体变形的连续性;其次需要将控制点向各方向都增加几层,将物面附近的控制点作为设计变量,其他控制点保持不变,控制点影响区域的局部性可以保证体网格变形量从物面附近到控制体边界逐渐衰减到0。
由于NFFD控制体外局部参数未定义,反求参数必须保证嵌入点在控制体内部。一般情况下,由于控制体是控制点组成的凸包多面体的子集且形状不规则,判定空间网格点在控制体内外的关系很困难。但当最外层控制点分别共面组成六面体时,定义的控制体可以充满整个六面体空间,则判定体网格点与控制体的内外关系,转化为判定体网格点与六面体的内外关系,后者实现方法简单。图 5给出了统一变形翼型和空间网格的二维NFFD控制点 (网格中黑色圆点),位于控制体内的体网格点需要反求局部参数并随同表面网格变形,控制体外的网格点在优化过程中保持不动。
 |
| 图 5 同时参数化物面和变形空间网格的控制体 Fig. 5 Control volume for both shape parameterization and space grid deformation |
| 图选项 |
使用图 5中NFFD控制体对翼型和空间网格进行变形,初始翼型和控制体局部放大如图 1(a)所示 (只显示了翼型附近的控制点),图 1(b)给出了翼型后缘产生大变形后的几何形状和控制点变化,由于采用3次基函数,翼型变化和未变化过渡区保持了几何连续性。图 6给出了翼型形状变化后空间网格及后缘网格局部放大图。图 7给出了使用改进距离权函数 (IDWF) 方法[17]得到的对应网格图。2种方法得到的空间网格基本相同,都不会出现体积变负等影响网格有效性的问题。
 |
| 图 6 NFFD变形空间网格 Fig. 6 Space grid deformation by NFFD |
| 图选项 |
 |
| 图 7 IDWF变形空间网格 Fig. 7 Space grid deformation by IDWF |
| 图选项 |
由NFFD控制点影响区局部性特点可知,当基函数次数为p时,只需要固定从控制体边界到内部共p层的控制点不移动,则网格变形量从物面到控制体边界逐渐衰减到0,因而从理论上可以保证控制体内外侧的网格变形匹配。
2 控制点对翼型反设计的影响 本文流场模拟采用基于非结构混合网格的有限体积法求解雷诺平均Navier-Stokes (RANS) 方程[17],并采用一方程的SA湍流模型。对流项和黏性项分别采用Roe格式和中心差分进行离散,时间离散基于LU-SGS方法。
采用基于梯度的非线性优化方法,梯度计算采用非结构网格的离散伴随方法。优化方法有拟牛顿 (Quasi-Newton,QN) 法[9]和序列二次规划 (Sequential Quadratic Programming,SQP) 方法[23]。
反设计是一种有效的翼型设计方法,同时由于其优化目标结果唯一,可以有效地开展控制点分布对优化结果的影响。
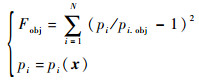
本文反设计初始翼型为NACA0012,目标翼型为标准的EH1590飞翼翼型。翼型绕流的来流条件为:马赫数Ma=0.75,雷诺数Re=5.6×106,温度T=216.77 K;计算迎角α=0°。反设计的目标函数Fobj为
 | (3) |
式中:pi为翼型上优化得到的压力;pi, obj为目标压力;N为给定目标压力点的数目;x为用作设计变量的控制点法向坐标的变形量。
计算网格如图 5所示,采用扩展NFFD方法参数化翼型和统一变形表面网格及空间网格。
2.1 控制点个数对设计结果的影响 控制点个数直接影响着设计空间,为了研究控制点分布对设计结果的影响,必须保证有足够的控制点,消除设计变量个数对结果的影响。
本文首先研究控制点个数对设计结果的影响,如图 8所示,控制点个数分别为24、32和48,且沿流向均匀分布。翼型反设计为无约束优化,为消除优化方法对结果的影响,分别采用QN法和SQP方法2种优化方法进行优化计算。
 |
| 图 8 初始翼型和3种均匀分布控制点 Fig. 8 Initial airfoil and three types of uniformly distributed control points |
| 图选项 |
图 9给出了3种控制点情况下目标函数随优化迭代步数的变化。随着控制点的增加,设计空间增大,采用QN法和SQP方法2种优化方法计算的目标函数收敛值都更小,收敛后的翼型更接近目标值,如图 10所示。同时,采用24个和32个控制点计算收敛后的翼型与目标翼型差别较大,采用48个控制点时设计翼型能收敛到目标翼型。
 |
| 图 9 控制点均匀分布时目标函数收敛历程 Fig. 9 Convergence history of objective function with uniformly distributed control points |
| 图选项 |
 |
| 图 10 控制点均匀分布时反设计翼型比较 Fig. 10 Comparison of inversely designed airfoils with uniformly distributed control points |
| 图选项 |
2.2 控制点分布对设计结果的影响 本文的NFFD技术控制点不必均匀分布,且一般情况下控制点的分布都会影响优化结果。图 11给出了控制点为48个且均匀分布时各个控制点在初始迭代步时目标函数对控制点移动量的梯度,靠近翼型的中间两排控制点比外侧控制点梯度大,且翼型前后缘控制点梯度很大,表明前后缘处的控制点对目标函数更敏感。因此在保持相同控制点数量时,将控制点向翼型前后缘聚集以提高优化效率,如图 12所示。
 |
| 图 11 第1步各控制点的目标函数梯度 Fig. 11 Objective function gradient of control points at the first step |
| 图选项 |
 |
| 图 12 初始翼型和3种聚集分布控制点 Fig. 12 Initial airfoil and three types of aggregated distributed control points |
| 图选项 |
图 13(a)给出了采用QN法优化计算的收敛历程。可以看出,与均匀分布类似,控制点越多,优化收敛后反设计翼型压力分布越接近目标翼型的压力分布。3种控制点个数情况下,控制点向翼型前后缘聚集后收敛的目标函数都比控制点均匀分布时更低,则反设计翼型越接近目标翼型。
 |
| 图 13 采用QN法和SQP方法的不同控制点目标函数收敛历程 Fig. 13 Convergence history of objective function based on different control points by QN and SQP methods |
| 图选项 |
采用SQP方法计算的结果与采用QN法类似,图 13(b)给出了相应目标函数的收敛历程。控制点均匀分布时,控制点增加目标函数收敛更低,但差别不是很大;控制点聚集分布时,控制点增加,目标函数收敛更低且差别很大,表明控制点聚集分布有效地扩大了设计空间。另外,对比图 13(a)和(b)可以看出,采用SQP方法比QN法收敛速度更快。
不同控制点分布时反设计的翼型对比如图 14所示,采用QN法和SQP方法2种优化方法的计算结果都表明,通过改进控制点分布,即将控制点向敏感的、更高的前后缘位置聚集,设计翼型能更好地收敛于目标翼型。
 |
| 图 14 控制点均匀和聚集分布时反设计翼型比较 Fig. 14 Comparison of inversely designed airfoils between uniformly and aggregated distributed control points |
| 图选项 |
不同控制点个数和控制点分布下,采用QN法和SQP方法2种优化方法分别进行翼型反设计,结果表明,控制点增多有利于增大设计空间而得到更好的反设计目标;采用NFFD方法参数化外形时,用作设计变量的控制点聚集分布到前后缘等流动敏感的几何区域,可以明显提高优化设计的效率。
3 飞翼标模优化设计 选取某飞翼标模气动优化问题进一步研究三维情况下控制点个数及其分布对优化结果的影响。共3组控制点及分布:
Case 1?63个控制点并向飞翼前后缘聚集,如图 15(a)所示 (略去了未选为设计变量的控制点)。
 |
| 图 15 飞翼优化改进前后的控制点及其分布 Fig. 15 Control points and distribution before and after flying-wing optimization |
| 图选项 |
Case 2?100个控制点并沿流向均匀分布,如图 15(b)所示。
Case 3?100个控制点并向飞翼前后缘聚集,如图 15(c)所示。
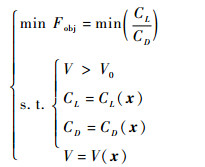
优化目标为提高巡航状态的升阻比,来流条件为:马赫数Ma=0.85,静压pt=26 500 Pa,温度T=216.77 K,侧滑角β=0°,迎角α=5°。优化过程中只允许飞翼上表面发生几何变形,且要求全机容积不减。优化问题可以表示为
 | (4) |
式中:V0和V分别为飞翼的初始容积和优化容积;CL为升力系数;CD为阻力系数;x为设计变量。优化方法采用SQP方法。
升阻比K和全机相对容积比V/V0的优化历程如图 16所示。控制点个数增加,收敛后的升阻比更大,同时收敛的速度加快;相同控制点个数时,将控制点向飞翼前后缘聚集收敛后升阻比稍大,收敛速度明显提高。此外,3种情况下优化后的容积都略有增加,且都在1%范围内。
 |
| 图 16 升阻比和相对容积比收敛历程 Fig. 16 Convergence history of lift-to-drag ratio and volume ratio |
| 图选项 |
图 17给出了3种情况下升力系数和阻力系数迭代过程。不同控制点个数及分布时,飞翼外形随优化迭代变化过程差别很大,且收敛后升阻力系数及外形差别都较大。
 |
| 图 17 升力和阻力系数收敛历程 Fig. 17 Convergence history of lift and drag coefficients |
| 图选项 |
图 18给出了优化前后20%和80% 2个展向站位η上3种控制点类型的剖面翼型形状和压力分布的比较。20%处剖面几何形状优化前后变化较小,但压力分布变化很明显;80%处剖面翼型后缘区域厚度增加明显,其上表面压力显著降低,下表面压力变化不大,因而升力增加明显。
 |
| 图 18 优化后不同展向剖面几何形状和压力分布比较 Fig. 18 Comparison of wing section shapes and pressure distribution at different span location after optimization |
| 图选项 |
3种控制点类型收敛后的几何外形和压力分布都有所差别,其中不同控制点个数差别更明显,因而收敛后升阻比差别更大。100个控制点的2种情况下,收敛后的目标函数和翼型形状差别都较小,但压力分布差别却比较明显。表明优化结果对控制点个数和分布都很敏感。
通过对飞翼提高升阻比优化的对比,结果表明,对于三维气动外形的优化问题,增加控制点和改进控制点分布后可以明显提高优化的效率。
4 结论 本文针对NFFD参数化方法变形飞行器外形时属于间接变形的特性,采用QN法和SQP方法2种优化方法,开展了翼型反设计和飞翼标模气动优化设计,研究了控制点个数及分布对外形优化设计的影响。
1) 根据NFFD技术单个控制点变形局部性特点,经过适当扩展NFFD控制体,实现了同时变形表面网格和空间网格,且从理论上确保了控制体内外网格变形协调。
2) 靠近几何外形的NFFD控制点对目标函数有更高的敏感度,因而当NFFD控制点过多或设计变量个数受优化方法限制时,应优先选择物面附近的控制点作为设计变量,以提高设计变量参数化和变形几何形状的能力。
3) 在控制点个数不增加的情况下,将控制点适度地向翼型或机翼前后缘等流动敏感的区域聚集,可以增加控制点变形几何的能力而扩大设计空间,显著提高优化效率。
本文参数化方法、网格变形方法及优化方法能有效实现反设计和气动优化的目标,在气动外形优化设计中具有很大的潜力。
参考文献
| [1] | BARRETT T R, BRESSLOFF N W, KEANE A J. Airfoil shape design and optimization using multifidelity analysis and embedded inverse design[J].AIAA Journal, 2006, 44(9): 2051–2060.DOI:10.2514/1.18766 |
| [2] | 靳军, 刘波, 曹志鹏, 等. 基于NURBS的三维轴流压气机叶片的几何型面优化研究[J].航空动力学报, 2005, 20(4): 625–629. JIN J, LIU B, CAO Z P, et al. Investigation of 3D axial flow compressor blade shape optimization based on NURBS[J].Journal of Aerospace Power, 2005, 20(4): 625–629.(in Chinese) |
| [3] | 马晓永, 范召林, 吴文华, 等. 基于NURBS方法的机翼气动外形优化[J].航空学报, 2011, 32(9): 1616–1621. MA X Y, FAN Z L, WU W H, et al. Aerodynamic shape optimization for wing based on NURBS[J].Acta Aeronautica et Astronautica Sinica, 2011, 32(9): 1616–1621.(in Chinese) |
| [4] | 卜月鹏, 宋文萍, 韩忠华, 等. 基于CST参数化方法的翼型气动优化设计[J].西北工业大学学报, 2013, 31(5): 829–836. BU Y P, SONG W P, HAN Z H, et al. Aerodynamic optimization design of airfoil based on CST parameterization method[J].Journal of Northwestern Polytechnical University, 2013, 31(5): 829–836.(in Chinese) |
| [5] | 李静, 高正红, 黄江涛, 等. 基于CST参数化方法气动优化设计研究[J].空气动力学学报, 2012, 30(4): 443–449. LI J, GAO Z H, HUANG J T, et al. Aerodynamic optimization system based on CST technique[J].Acta Aerodynamica Sinica, 2012, 30(4): 443–449.(in Chinese) |
| [6] | 王迅, 蔡晋生, 屈崑, 等. 基于改进CST参数化方法和转捩模型的翼型优化设计[J].航空学报, 2015, 36(2): 449–461. WANG X, CAI J S, QU K, et al. Airfoil optimization based on improved CST parametric method and transition model[J].Acta Aeronautica et Astronautica Sinica, 2015, 36(2): 449–461.(in Chinese) |
| [7] | 陈颂, 白俊强, 孙智伟, 等. 基于DFFD技术的翼型气动优化设计[J].航空学报, 2014, 35(3): 695–705. CHEN S, BAI J Q, SUN Z W, et al. Aerodynamic optimization design of airfoil using DFFD technique[J].Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 695–705.(in Chinese) |
| [8] | AMOIRALIS E I, NIKOLOS I K. Freeform deformation versus B-spline representation in inverse airfoil design[J].Journal of Computing and Information Science in Engineering, 2008, 8(2): 1–13. |
| [9] | 李彬, 邓有奇, 唐静, 等. 基于三维非结构网格的离散型伴随方法[J].航空学报, 2014, 35(3): 674–686. LI B, DENG Y Q, TANG J, et al. Discrete adjoint method for 3D on unstructured grid[J].Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 674–686.(in Chinese) |
| [10] | 王丹, 白俊强, 黄江涛. FFD方法在气动优化设计中的应用[J].中国科学:物理学力学天文学, 2014, 44(3): 267–277. WANG D, BAI J Q, HUANG J T. The application of FFD method in aerodynamic optimization design[J].Scientia Sinica:Physica, Mechanica & Astronomica, 2014, 44(3): 267–277.(in Chinese) |
| [11] | 王元元, 张彬乾, 郭兆电, 等. 基于FFD技术的大型运输机上翘后体气动优化设计[J].航空学报, 2013, 34(8): 1806–1814. WANG Y Y, ZHANG B Q, GUO Z D, et al. Aerodynamic optimization design for large upswept afterbody of transport aircraft based on FFD technology[J].Acta Aeronautica et Astronautica Sinica, 2013, 34(8): 1806–1814.(in Chinese) |
| [12] | 黄江涛, 高正红, 白俊强, 等. 基于任意空间属性FFD技术的融合式翼稍小翼稳健型气动优化设计[J].航空学报, 2013, 34(1): 37–46. HUANG J T, GAO Z H, BAI J Q, et al. Study of robust winglet design based on arbitrary space shape FFD technique[J].Acta Aeronautica et Astronautica Sinica, 2013, 34(1): 37–46.(in Chinese) |
| [13] | RONZHEIMER A, HEPPERLE M, BREZILLON J, et al.Aerodynamic optimal engine integration for a business jet configuration:AIAA-2012-1841[R].Reston:AIAA, 2012. |
| [14] | LI J, GAO Z H, HUANG J T, et al. Aerodynamic design optimization of nacelle/pylon position on an aircraft[J].Chinese Journal of Aeronautics, 2013, 26(4): 850–857.DOI:10.1016/j.cja.2013.04.052 |
| [15] | 王婧超, 李立州, 岳珠峰. 自由网格变形技术在涡轮叶片多学科设计优化过程中的应用[J].飞机设计, 2006, 27(3): 40–43. WANG J C, LI L Z, YUE Z F. Free-form deformation application in multidisciplinary design optimization procedure of turbine blades[J].Aircraft Design, 2006, 27(3): 40–43.(in Chinese) |
| [16] | KENWAY G K W, KENNEDY G J.A CAD-free approach to high-fidelity aerostructural optimization:AIAA-2010-9231[R].Reston:AIAA, 2010. |
| [17] | 唐静, 邓有奇, 马明生, 等. 飞翼气动优化中参数化和网格变形技术[J].航空学报, 2015, 36(5): 1480–1490. TANG J, DENG Y Q, MA M S, et al. Parametrization and grid deformation techniques for flying-wing aerodynamic optimization[J].Acta Aeronautica et Astronautica Sinica, 2015, 36(5): 1480–1490.(in Chinese) |
| [18] | LYU Z, MARTINS J R R A.RANS-based aerodynamic shape optimization of a blended-wing-body aircraft:AIAA-2013-2586[R].Reston:AIAA, 2013. |
| [19] | SEDERBERG T W, PARRY S R. Free-form deformation of solid geometric models[J].ACM Siggraph Computer Graphics, 1986, 20(4): 151–160.DOI:10.1145/15886 |
| [20] | LAMOUSIN H J, WAGGENSPACK W N. NURBS-based free-form deformations[J].Computer Graphics and Applications, 1994, 14(6): 59–65.DOI:10.1109/38.329096 |
| [21] | YAMAZAKI W, MOUTON S, CARRIER G.Efficient design optimization by physics-based direct manipulation free-form deformation:AIAA-2008-5953[R].Reston:AIAA, 2008. |
| [22] | FARIN G.Curves and surfaces for computer aided geometry design-A practical guide[M].5th ed.New York:Academic Press, 2002. |
| [23] | PANIER E R, TITS A L. On combining feasibility, descent and superlinear convergence in inequality constrained optimization[J].Math Programming, 1993, 59(1): 261–276. |
