����ֻ�����������������ӵ�м�ʻ��������ؼ���[3-5]����Ҫ�����¹���ST�FHLE��SCHENCK������LBECO��Ӣ��ABD��Froude Consine��Mira���ձ�Horiba��Nissan Motor��˾�ȡ��й��������Ƶļ�ʻ��������Ҫ���ɶ��ϴ�ѧ���Ͼ������о�����ͬ���Ƶ�DNCϵ�м�ʻ������[6-8]��
�ڼ�ʻ�����˵����ƹ����У������о��ǽ�ʡ�о����ѡ����̼����з�ʱ�����Ҫ;��[9]���й��������Ժ�ţ־��[10]����ADAMS����ʵ���˶Լ�ʻ��������ϻ�е�ȵĶ���ѧ���棬����δ�漰��е�ȵ�����������ơ����Ƶ�[11]��MATLAB������ʵ���˶Լ�ʻ������λ���ŷ�ϵͳ�ķ�������������ŷ�ϵͳ��û���漰��еװ�õĶ���ѧģ�͡����ң����еķ������������δ�漰����ģ�ͣ��������жϼ�ʻ�����˲��ݳ�����������Ϊ�ˣ������ڶԼ�ʻ�����˵Ļ�е�Ƚ��ж���ѧ�����뽨ģ�Ļ����ϣ����һ��Ӧ��ADAMS��Simulink��CarSim������ͬ�����ġ���ʻ������-���������Ϸ���ƽ̨���������˳��ٸ��ٵķ���ʵ�顣
1 ��е�ȶ���ѧ���� ��е����Ҫ���ŷ�����ͻ�е�ṹ��������ɡ����ĵ��ŷ�������ý����ŷ����������ʵ�ʼ�ʻ�ж����ź��ƶ�̤��Ķ���������ͬ�����Ա���������ʻ���������Ż�е�Ⱥ��ƶ���е�Ȳ�����ͬ�Ļ�е�ṹ����ͼ 1��ʾ�������˻�е����Ҫ������е�ȱۡ�̤��а塢����˿�ܡ�˿��֧�����ͻ���ȡ�
 |
| ͼ 1 ��е����άģ�� Fig. 1 Three-dimensional model of mechanical leg |
| ͼѡ�� |
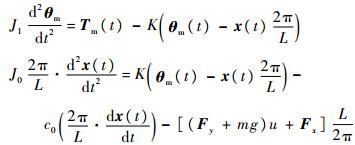
�ýṹΪһ����ҡ�˻������ŷ����ͨ����������������˿��ת����������˿����ĸ�ϵĻ������Ź���˿�ܵ����߷�����ֱ���˶���ͨ�����˺�̤��а壬������̤��а������̤��ת�������ڸû��������ŷ��綯�������ڶ����Ͼ����˼���ĵ��Ժ���˳�ԣ���������ʵ�ʡ���е�ȵ���ѧ�ṹ��ͼ��ͼ 2��ʾ��ͼ�У�J1��K1��Tm����m�ֱ�Ϊ������ת��������Ťת�նȡ����ת�غ����ת�ǣ�m��c��K3��x�ֱ�Ϊ����ĵ�Ч�����������뵼�����˿��֮����ƶ�����ϵ��������˿�ܸ�����ѹ�նȺͻ����λ�ƣ�Fx��Fy�ֱ�Ϊ������������;��������
 |
| ͼ 2 ��е����ѧ�ṹ��ͼ Fig. 2 Mechanical structure diagram of mechanical leg |
| ͼѡ�� |
��ϵͳ������ת�������ݵ�Чԭ���õ�ϵͳ�Ķ���ѧ����[12]Ϊ
 | (1) |
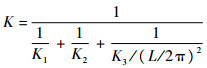
ʽ�У�LΪ����˿���ݾࣻuΪ����˿���뵼��֮���Ħ��ϵ����KΪϵͳ�ĵ�ЧŤת�նȣ���
 | (2) |
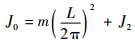
J0Ϊ���������˿�������˿��ת���ĵ�Чת����������
 | (3) |
c0Ϊ��Чת������ϵ������
 | (4) |
���У�J2��K2�ֱ�Ϊ����˿�ܵ�ת��������Ťת�նȡ�
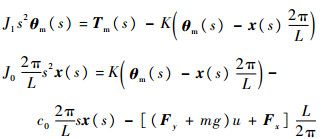
��ʽ(1)����������˹�任��
 | (5) |
�ɼ���е�ṹ�Ĵ��ݺ�����һ��2�����ڣ�ת��Ϊ����ʽΪ
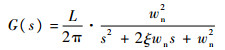 | (6) |
ʽ�У�

2 ����ģ�� 2.1 ��е�ȶ���ѧģ�� ��ʻ�����˻�е�ȵĻ�е�ṹģ����ADAMS�����н���[13]����ADAMS���������ø����㲿��֮����˶�������ɵĻ�е�ṹADAMS����ģ����ͼ 3��ʾ����Ҫ�˶�����ϵ���� 1��ʾ��
 |
| ͼ 3 ��е��ADAMS����ģ�� Fig. 3 ADAMS simulation model of mechanical leg |
| ͼѡ�� |
�� 1 ��е����Ҫ�˶��� Table 1 Main kinematic pair of mechanical leg
| ���� | ���� | ����1 | ����2 |
| JOINT_1 | �̶��� | ��װ�� | ��� |
| JOINT_2 | ת���� | ����˿�� | ��װ�� |
| JOINT_3 | ���Ƹ� | ˿����ĸ | ����˿�� |
| JOINT_4 | ת���� | ���� | ��е�ȱ� |
| JOINT_5 | ת���� | ��е�ȱ� | �ƶ�̤�� |
��ѡ��
��е�ȵ��ŷ����ģ����Simulink�н���������ʸ���任��[14]�Ե���������Ի�������ƣ������е�ṹADAMS����ģ�ͺ�ϵͳ�ɵ��������ٶȻ���λ�û���ɣ�����������PID���ƣ������Ļ�е�ȶ���ѧģ����ͼ 4��ʾ��ͼ�У�kΪ����ת��Ϊ�Ƕȵı���ϵ����
 |
| ͼ 4 ��е�ȶ���ѧģ�� Fig. 4 Dynamic model of mechanical leg |
| ͼѡ�� |
2.2 ����ʻ������-���������Ϸ���ģ�� Ϊģ���ʻ�����˶Գ����Ŀ��ƹ��̣��ڻ�е�ȶ���ѧģ�͵Ļ����ϣ�����CarSim������������ģ��[15]�����������ڱջ��ٶȿ��Ƶ����Ϸ���ƽ̨������ƽ̨��Ĺؼ�����������е�ȶ���ѧ��ģ��������ģ������ϵͳ����Լ������ӿڼ�����
��ADAMS/View�н����Ķ���ѧģ�ͣ�ͨ��ADAMS/Control�ӿ�ģ����Simulink����ϵͳʵ�����ݽ��������ö���ѧģ�͵��������Ϊ��ʻ�����˻�е�ȵ��ŷ�����Ƕȣ��������������е�ȹ���˿��ת�ǡ�̤��ת�ǡ�����ģ����CarSim�����н������������Ϊ����̤��ת�Ǻ��ƶ�����ѹ���������Ϊ���١�ͼ 5Ϊ���Ϸ���ģ�͵������ӿ�ʾ��ͼ��
 |
| ͼ 5 �����ӿ�ʾ��ͼ Fig. 5 Schematic diagram of software interface |
| ͼѡ�� |
��Simulink�л��ڱջ��ٶȿ��ƽ����ġ���ʻ������-���������Ϸ���ģ����ͼ 6��ʾ��
 |
| ͼ 6 ����ʻ������-���������Ϸ���ģ�� Fig. 6 Collaborative simulation model of "robot driver-vehicle" |
| ͼѡ�� |
����ģ���Ը����ij�������Ϊ���룬������ģ�͵����������Ŀ�공�ٽ��бȽϲ�������е�ȿ���ϵͳ��ȡ�ʵ��Ŀ��Ʒ�ʽ������������ŷ�����˶����ɣ��ŷ����ģ��ͨ��λ��PID���ƣ��Ի�е�ȹ���˿�ܺ�̤��ת�ǽ��е���������������������ʻ�ٶȣ�����������Ϣʵʱ����������ϵͳ��ʵ�ֱջ����ơ�
3 ����ʵ������� ��Ա��ĵ�2������ģ�ͣ���Simulink�����ò������£�adams_subͨ��ʱ����Ϊ0.005 s��animation_modeѡ��batch��simulation_modeѡ��discreteģʽ��
3.1 ��е�ȶ���ѧģ�ͷ�������� ���ڻ�е�ȶ���ѧģ�ͣ��ֱ������ŷ������λ�ƽ�Ծ�źź������źţ��õ��Ļ�е�ȹ���˿��ת����Ӧ���߷ֱ���ͼ 7��ͼ 8��ʾ��ͼ�У�ģ���ٽ��ָʹ�û�е�ȶ���ѧģ�͵õ�����Ӧ���ߣ����۸��ٽ��ָʹ��ʽ(6)�еĴ��ݺ����������ģ���еĻ�е�ṹADAMSģ��ó�����Ӧ���ߡ�
 |
| ͼ 7 ��Ծ�źŸ������� Fig. 7 Tracking curves of step signal |
| ͼѡ�� |
 |
| ͼ 8 �����źŸ������� Fig. 8 Tracking curves of sinusoidal signal |
| ͼѡ�� |
��ͼ 7��ͼ 8�п�֪������ģ���ڶԽ�Ծ�źź������źŵĸ��ٹ����У�ģ���������۸��ٽ�������Ǻϡ����ٽ�Ծ�ź�ʱ��ϵͳ����ʱ��ԼΪ1.3 s���������С��0.1%�����������źŹ����У����ź�Ƶ��f=1.0 rad/sʱ������ʱ��ԼΪ0.2 s��������Ļ�е�ȶ���ѧģ�;������õĿ������ܣ��ܹ�����ȷ�ظ����ŷ�����Ľ�λ�����룬�������Ҫ��
3.2 ����ʻ������-���������Ϸ�������� ��������ѡ��GB 18352.3��2005�еIJ��ֵ�·���鹤��[16]�������˼�ʻ�����Գ��ٵĸ��������ͼ 9��ʾ�����ٹ��������ſ��Ⱥ��ƶ���ѹ�ı仯��ͼ 10��ʾ��
 |
| ͼ 9 ���Ϸ��泵�ٸ��ٹ��� Fig. 9 Vehicle speed tracking process in collaborative simulation |
| ͼѡ�� |
 |
| ͼ 10 ���ź��ƶ�����ʾ��ͼ Fig. 10 Schematic diagram of throttle and braking parameters |
| ͼѡ�� |
��ͼ 9��ͼ 10��֪��������ģ�ͻ����ܹ���ɼij��ٸ��������ڸ����ٶȹ�������Ӧ�Ŀ��Ʒ�ʽ�£��ڳ������ٽΣ����������Ż�е���ܹ���ȡ��Ӧ�IJ�̤�嶯�������м��٣���Ӧ����ʱ��ԼΪ0.7 s�������ٽΣ����Ż�е���ܹ����ֳ��ٵ�����ȶ���û�г���Ƶ�����ɡ�������̤�嶯�������ٸ������С�ڡ�2 km/h���ڼ��ٽΣ����Ż�е���ܹ�Ѹ�ٻ��㣬�ƶ���е�Ƚ����ƶ����������˼�ʻ�����жԳ������ߵĸ�����Ӧ�Ƚ�ƽ�ȡ����٣��������㹤����Ҫ��
4 ���� 1)������Ա������պ����ѧ�������Ƶ����ܼ�ʻ�����ˣ��������������Ʒ���������ADAMS��Simulink������˼�ʻ�����˻�е�ȵĶ���ѧ����ģ�ͣ������˻�е�ȿ������ܷ�����
2)����ADAMS��Simulink��CarSim������ͬ��˼�ʻ�����˽��г��ٿ��ƵĻ������Ϸ���ƽ̨��������˿��Ʋ��ԡ�
3)����ʵ�����������������Ļ�е�ȶ���ѧģ�;��нϺõĿ������ܣ�����ġ���ʻ������-���������Ϸ���ƽ̨�ܹ����㹤��Ҫ��Ϊ�����˻�е�ṹ�ĸĽ��Ϳ��Ʋ����Ż��ṩ����������ƽ̨������ؽ�ʡ���о�ʱ��;��ѣ�����˿���ϵͳ�����Ч�ʡ�
�����
| [1] | ½����, ������. �������ܽ�ͨϵͳ�ķ�չ��״������[J].�����о�������ѧ����Ұ�еĹ���, 2014, 6(1): 6�C19.LU H P, LI R M. Developing trend of its and strategy suggestions[J].Journal of Engineering Studies, 2014, 6(1): 6�C19.(in Chinese) |
| [2] | ��С��, �ν�, ������, ��. ������·������Է����о���չ[J].ũҵ��еѧ��, 2009, 40(4): 38�C44.ZHANG X L, SONG J, FENG N L, et al. Research progress of measurement method for vehicle road way test[J].Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(4): 38�C44.(in Chinese) |
| [3] | THIEL W, GROF S, HOHENBERG G, et al. Investigations on robot driver for vehicle exhaust emission measurements in comparison to the driving strategies of human drivers[J].SAE Transactions, 1998, 107(4): 1922�C1929. |
| [4] | CZUBENKO M, KOWALCZUK Z, ORDYS A. Autonomous driver based on an intelligent system of decision-making[J].Cognitive Computation, 2015, 7(5): 569�C581.DOI:10.1007/s12559-015-9320-5 |
| [5] | ERICSSON E. Independent driving pattern factors and their influence on fuel-use and exhaust emission factors[J].Transportation Research Part D-Transport and Environment, 2001, 6(5): 325�C345.DOI:10.1016/S1361-9209(01)00003-7 |
| [6] | ��Ϊ��, ������. ������ʻ�����˹ؼ�����[J].���մ�ѧѧ��(��Ȼ��ѧ��), 2005, 26(1): 20�C23.ZHANG W G, CHEN X B. Key technologies of vehicle robot driver[J].Journal of Jiangsu University (Natural Science Edition), 2005, 26(1): 20�C23.(in Chinese) |
| [7] | CHEN G, ZHANG W, ZHANG X. Speed tracking control of a vehicle robot driver system using multiple sliding surface control schemes[J].International Journal of Advanced Robotic Systems, 2013, 10: 90. |
| [8] | CHEN G, ZHANG W, ZHANG X. Fuzzy neural control for unmanned robot applied to automotive test[J].Industrial Robot-An International Journal, 2013, 40(5): 450�C461.DOI:10.1108/IR-08-2012-398 |
| [9] | ������. ��ģ����漼���ķ�չ��Ӧ��[J].��е�������Զ���, 2010, 39(1): 1�C6.WANG X R. Development and application of modeling and simulation technology[J].Machine Building & Automation, 2010, 39(1): 1�C6.(in Chinese) |
| [10] | ������, ţ־��. ����ADAMS�ļ�ʻ��������ϻ�е�ȵĶ���ѧ����[J].��е��������, 2009, 24(3): 152�C153.MA Y H, NIU Z G. Dynamic simulation of clutch robot leg of robot driver based on ADAMS[J].Mechanical Management and Development, 2009, 24(3): 152�C153.(in Chinese) |
| [11] | ����, ���̹�, ������. ���������;�������ļ�ʻ������ģ�����Ʒ���[J].ϵͳ���漼��, 2013, 9(1): 61�C65.JIANG H, YUE J G, HU L D. Fuzzy control strategy study of servo system in robotic driver[J].System Simulation Technology, 2013, 9(1): 61�C65.(in Chinese) |
| [12] | ������. �ŷ�ϵͳ�������������[M].����: ��е��ҵ������, 1994: 240-242.LI Q X. Servo system and electrical control of machine tool[M].Beijing: China Machine Press, 1994: 240-242.(in Chinese) |
| [13] | ����ϼ, ����ϲ, ��ʿ͢. ADAMS 2012�������������ŵ���ͨ[M].����: ��е��ҵ������, 2013: 81-87.LIU J X, HU R X, KANG S T. ADAMS 2012 virtual prototype from entry to the master[M].Beijing: China Machine Press, 2013: 81-87.(in Chinese) |
| [14] | ����, ������, ��͢��. ����λ���ŷ�ϵͳPID���Ʒ���ʵ��[J].���ӻ�е����, 2003, 19(1): 52�C54.DING F, QU M C, LIN T Q. Realization of PID control method in AC position servo system[J].Electro-Mechanical Engineering, 2003, 19(1): 52�C54.(in Chinese) |
| [15] | ���, ������, ½־��, ��. ����CarSim�ij�������ӦѲ�������������о�[J].�����Ƽ�, 2013(2): 46�C52.LI J L, XIA T Z, LU Z C, et al. Research on adaptive cruise control technology based on CarSim[J].Auto Mobile Science & Technology, 2013(2): 46�C52.(in Chinese) |
| [16] | ���һ��������ܾ�.����������Ⱦ���ŷ���ֵ����������(�й�����):GB 18352.3-2005[S].����:�й���������, 2005.State Environmental Protection Administration of China.Limits and measurement methods for emissions from light-duty vehicles(��, ��):GB 18352.3-2005[S].Beijing:Standards Press of China, 2005(in Chinese). |
