������˻���ӷ��п������⣬Leader-Follower��������һ�ֱ�ӿ��Ʒ�������������ƶ������˱�ӿ��Ƶ�����[1]�У���������˻���ӿ����еõ��˹㷺��Ӧ��[2-4]���÷���ʵ�������Ƚϼ�������ȶ��Բ������������Ŵ�����ṹ����������˶��ĸ���[5-7]���������еĸ���������Ϊÿ�����˻���λ�á�����[8-10]����ģ��Ԥ����Ʒ����Ա�ӽ��п��ƣ����кܺõ���Ӧ�ԣ������ڶ�̬�仯�ı�ӿ������⣬����ģ���ӡ��������ϴ���֮�⣬�˹��Ƴ���[11]�ͻ�����Ϊ��[12]Ҳ�������ڱ�ӿ����У������ƾ��Ƚϲ
������Leader-Follower���Ļ����������һ�ֻ����յ����ߵı�ӷ��п��Ʒ����������Ƿ��й����г��ֵ�ͻ���ϰ��Լ�����ڷɻ�����ײ����[13-14]��
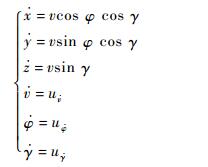
1 �������� 1.1 ���˻��˶�ģ�� �����˻���Ϊ�ʵ㣬������άƽ���ڵ��˶�ģ��Ϊ
 | (1) |
ʽ�У�x��y��z�ֱ�������˻��ľ��ȡ�γ�Ⱥ߶�; vΪ�ɻ�����; �������ֱ�Ϊ���˻��ĺ���ƫ���Ǻ�����;

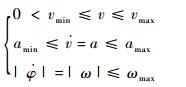
ʹ���ʵ�ģ�͵�ͬʱһ��Ӧ�ü����ʵ���Լ������������ģ�ͽ������ƣ�
 | (2) |
ʽ�У�vmin��vmax�ֱ�Ϊ�ɻ���С������ٶ����ƣ�amin��amax�ֱ�Ϊ�ɻ���С�������ٶ����ƣ�aΪ�ɻ����ٶ�; ��Ϊ�ɻ�ƫ�����ٶ�; ��maxΪ�ɻ����ƫ�����ٶȡ�
1.2 ��Ӷ��� ��Ӷ��θ����˳����Լ����Ż��ڱ�ӷ���ʱ��Ҫ���ֵ����λ�ù�ϵ������ǰ��Ͳ�����룬�����ʾ��ԭ���볤��������λ�ǵ��ڳ���ƫ���ǵĵ�������ϵ�У���ͼ 1��ʾ��
 |
| ͼ 1 �������ϵ Fig. 1 Coordinate system of formation |
| ͼѡ�� |
1.3 ϵͳ��ͼ ÿ�����˻��ķ��п���ϵͳ��ͼ��ͼ 2��ʾ��
 |
| ͼ 2 ϵͳ��ͼ Fig. 2 System block diagram |
| ͼѡ�� |
����ϵͳ��ͼ��Ϊ3�㣬�ֱ�Ϊ���߲㡢����֪��ͷ��п��Ʋ㡣���˻�ͨ������ͨ�Ż�ñ����Ϣ�Լ�����������ɻ���Ϣ��ͨ����֪ϵͳ��û�����Ϣ��һ������Ƿ����ϰ���Ϣ�����ݻ�õ���Ϣ���б�ӿ��ơ����Ͽ����Լ���ײ���ƣ��ó���Ӧ�����������ó��Ŀ������������п���ϵͳҲ�����Զ���ʻ�ǣ�Ȼ��ͨ�����п���ϵͳ��ɶ����˻��Ŀ��ơ�
2 �����յ����ߵı�ӷ��п��� �γɱ�Ӻ������������ٶȰ��ո����ĺ��߷��У��Ż�������Գ�����λ�ý��б�ӱ��ֿ��ƣ������Ǹ��ݵ�ǰ���������λ�õ����ͳ����ķ���״̬�����յ����ߣ������ٸú��ߣ�ͬʱ���ݳ������ٶ��Լ������������λ�õ����������ڷɻ��ٶȡ�
2.1 �յ���������ԭ�� ���Ż����ٳ�����ʱ������յ����߿��Ʒ�ʽ�����ݵ�ǰ�Ż��������λ�õ��������һ���յ����ߣ�Ȼ�����ú��߸��ٷ��������Ż����ÿ��Ʒ�ʽ����λ�����Ĵ�С�л���ͬ�ĺ������ɷ������л����߿��Ʒ�����ԭ�����ǣ���Զ������λ�õ�ʱ������λ�÷��У�����������λ�ø���ʱ���ؾ����Ż�����λ�ò��볤���ٶȷ���ƽ�е��յ����߷��С�
�����л����Ż��������λ�õ�����Сȷ�����л���Χ���ü̵�����������ʽ���л���Χ�Ĵ�С���ݷɻ�ת�������趨����ͼ 3��ʾ��
 |
| ͼ 3 �����л���Χ Fig. 3 Range of route switching |
| ͼѡ�� |
�ϴ���Բ����߽��ʾ��ƽ���յ������л�����������λ���յ����ߵ��л��ߣ���ƽ���յ���״̬��һ���Ż��ӽϴ���Բ�ڴ����ͽ����л���
��С��Բ����߽��ʾ�ӳ�������λ���յ������л���ƽ���յ����ߵ��л��ߣ��ڳ�������λ���յ���״̬��һ���Ż����ⲿ�����С��Բ���л���
��������λ���յ����ߵ����ɷ����ǣ���ÿһ���������ڣ����Ż���ǰλ��Ϊ��㡢���Ż�����λ��Ϊ�յ������յ����ߣ���ͼ 4��ʾ��
 |
| ͼ 4 �����յ����� Fig. 4 Directing guidance route |
| ͼѡ�� |
ƽ���յ����ߵ����ɷ����ǣ���ÿһ���������ڣ����Ż�����λ��Ϊ��㣬�����õ�ƽ���ڳ��������������Ϊ�յ����ߣ���ͼ 5��ʾ��
 |
| ͼ 5 ƽ���յ����� Fig. 5 Parallel guidance route |
| ͼѡ�� |
�Ż������յ����ߵĿ��Ʒ����������ͨ���ߵķ�����ȫ��ͬ��
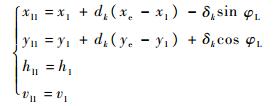
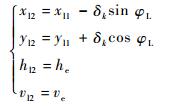
2.2 �յ��������� ����Ϊ�յ�������2����ļ��㹫ʽ���������Ż�1Ϊ�����Ż�1��ʵ��λ��Ϊ(x1, y1, h1)���ٶȺ�ƫ����Ϊ(v1, ��1)��������ʵ��λ��Ϊ(xL, yL, hL)���ٶȺ�ƫ����Ϊ(vL, ��L)��
 | (3) |
 | (4) |
ʽ�У���kΪ�̶��ľ��룻����dk�����յ�����λ�ã�he��ve�ֱ�Ϊ�Ż�1�������߶Ⱥ������ٶȣ�xe��yeΪ�Ż�1������λ�ã�
 | (5) |
���У�DF��DW�ֱ�Ϊ�Ż��ڱ��������ڳ�����ǰ�����Ͳ�����롣
�յ����߲���������ͼ 6��ʾ����ʽ(3)��֪���յ����ߵ�λ����Ҫ�ɲ���dk������dkΪһ����0��1�ı��������ݷɻ��Ĺ�ת�����趨����dk=0ʱ�����Ż�ʵ��λ��Ϊ�����Գ������з���Ϊ��������յ����ߣ���dk=1ʱ�����Ż�����λ��Ϊ�����Գ������з���Ϊ��������յ����ߡ��ڷ��й����в��ϸı�dk��ʹ�յ������ӽ��Ż�������λ�ã��Ż�ͨ�������յ�������ʵ��λ�õ�����λ���ƶ�������ʹ�����˻�����������λ�á�
 |
| ͼ 6 �յ����߲������� Fig. 6 Production process of guidance route |
| ͼѡ�� |
2.3 �Ż��յ����߸��� �Ż������յ�����ʱ����Ҫ�漰3���ؼ������������ٶȡ������Լ���ƫ��
�����ٶ��볤�Ż����յ������ϵ�ͶӰ����(d)�������ٶȷ���(vLd)�ͳ��Ż��ٶȷ���(vLg)���йء�
 | (6) |
ʽ�У�k1��k2Ϊ����ϵ������ɻ��ĵ��������йء�
���Ż����յ������ϵ�ͶӰ���룺
 | (7) |
�����ٶȷ�����
 | (8) |
���Ż��ٶȷ����
 | (9) |
ʽ�У�
 | (10) |
���У�deΪ�Ż�ʵ��λ��������λ�õľ��룻d0Ϊ�л���Χ���ɼ������Ż����յ������ϵ�ͶӰ���롢�����ٶȷ����ͳ��Ż��ٶȷ�����Խ���������ٶȾ�Խ��
��ǰ��������������ļнǣ�
 | (11) |
��ƫ���Ż���ǰ�㵽�յ����ߵ�������롣
2.4 ��ӱ��� ���˻�����ڷ��й��������ͻ����вʱ��Ҫ��ʱ��Ӧ���ڱ�֤˳������ϰ���ǰ���£�������С������ӵĻ���������
��������ͼ��ͼ 7��ʾ��
 |
| ͼ 7 �����㷨����ͼ Fig. 7 Flowchart of obstacle avoidance algorithm |
| ͼѡ�� |
���˻����ϰ�����ݵ�ǰ�����λ���Լ��ϰ����λ�ü������˻�ǡ���ƹ��ϰ��ľ��룬ͬʱ���Ǹı�λ�ú����������˻��Ƿ�����ײ��ͻ������У����㵱ǰλ�����ƹ��������˻��ľ��룬��ʱ��Ҫ���Ǿ�����С������ӻ�����������2�μ���ľ������õ����˻�ԭ�����λ���ϣ��Ӷ��ı��Ӷ���˳��ͨ���ϰ���
Ϊ�˱���˵���㷨���̣��־���˵�������ɻ��ڶ���ϰ�ʱ���������ɻ�������ײ����ʱ����ͼ 8��ʾ��
 |
| ͼ 8 ��ӱ��� Fig. 8 Formation of obstacle avoidance |
| ͼѡ�� |
��d1 < d2ʱ���ɻ�����߱��ϣ�������3�ŷɻ���ײ������ɱ�ӵ��Ŷ��������Ҫ���ұ߱��ϡ����d1 << d2��4�����˻����ұ�Ҫ��һ����Զ�ľ��룬��ʱ��Ҫ����߱��ϣ��ڸı��������ͬʱ�ı�ǰ����룬��ֹ��3����ײ��
���ɻ��ı������λ��Ϊ
 | (12) |
ʽ�У�df��de�ֱ�Ϊ�Ż�����е�ǰ��ͺ�����롣
2.5 ����㷨���Զ���ʻ�ǿ��� �ɻ��ĺ�����ƣ����ݷɻ��ຽ�ߵIJ�ƫ����͵�ǰ����
 | (13) |
ʽ�У�kd��k��Ϊ���Ʋ�����
�ɻ����ٶȲ���PI���ƣ�
 | (14) |
ʽ�У�evΪ�����ٶ��뵱ǰ�ٶȵ�ƫ�KpΪ����ϵ����TΪʱ�䡣
�ɻ��ĸ߶ȿ���Ϊ
 | (15) |
ʽ�У�khΪ����ϵ����HeΪ�����߶ȣ�HΪ�߶ȡ�
��������Ϊ
 | (16) |
3 ��ӷ�ײ�㷨 ���˻��ڱ�ӷ��й�������Ϊ��Ҫ�ľ��Ƿ�ֹ�ɻ�֮�����ײ�����������⣬���ĸ������˻��Ŀռ�λ������˻�����ײ���ȼ��ķ�ײ�㷨���㷨����ͼ��ͼ 9��ʾ��
 |
| ͼ 9 ��ײ�㷨����ͼ Fig. 9 Flowchart of collision avoidance algorithm |
| ͼѡ�� |
��ײ�㷨������������ӷ��й����У�ÿ�����˻���ʵʱ����������˻���Ϣ����Ԥ�����ǿ��ܵ���ײ�㣬���ݵ�ǰλ������ײ��λ����Ʒ�ײ�㷨���ڱ�ײ��ͬʱ��Ҫ�������ȼ����⡣
3.1 ��ײ�㷨��� ��ײʱ���ݷɻ��ڿռ��е��ٶ������Լ����λ��(��ͼ 10)���ֱ�Ӹ߶Ⱥͺ�����������ж��[15]�����У�
 |
| ͼ 10 �ɻ�֮��ļ���λ�� Fig. 10 Geometric position of aircrafts |
| ͼѡ�� |
 | (17) |
ʽ�У�vi��vjΪ2�����˻����ٶ�������eijΪ����������
���ݷɻ�����ײ��Ĵ�ֱ�����Լ�������ײ���ʱ����Ʊ�����ײ�Ŀ�������
 | (18) |
ʽ�У�dijΪ2�����˻��ĸ߶Ȳti��tjΪ������ײ���ʱ�䣻ki��kij��kdeΪ���Ʋ�������ɻ���ת���Լ����������йء�
���Կ������������Ľӽ���ʱ����̣���������֮�����������ֱ���ӵ������Լ��߶ȿ������ϣ�
 | (19) |
ʽ�У�


3.2 ����ģ�����ı�ײ���ȼ���� ��2�����˻�����ײ��ͻʱ��˫�������б��û���ɽϴ�Ļ������ۣ���������Ӵ����ϴ���Ŷ�������ڱ���ʱҪ���DZ������ȼ����⣬�����ȼ������˻����Բ��ñ��ã������ȼ������˻����б��á����˻��ı�ײ���ȼ������˻��Ļ���DZ��������̶��Լ����˻�����Ҫ�̶Ⱦ�����
3.2.1 ģ�����������Ⱥ�������� �������˻�����̶Ƚ�����Ȼ���Ϊ10���ȼ���������Ϊ[1, 10]���ڴ�����Ļ����϶���5��ģ�������ֱ�Ϊ�������ء����ء�һ�㡢���ᡢ����5��ģ�������������������ͼ 11��ʾ��ͼ��ʵ�ߺ����߷ֱ�����˲�ͬģ���Ӽ��������Ⱥ�����ģ���Ӽ��ڶ�Ӧ�����������Ϊ1�������������������Ϊһ��б�ߣ��������������е����ӣ������������佻�����ӡ���������ô�������������һ��ֻ������һ��ģ���Ӽ���
 |
| ͼ 11 ���������Ⱥ��� Fig. 11 Damaged membership function |
| ͼѡ�� |
�������˻��ķ���״���Լ���ײ��������˻��Ļ���DZ�������жϣ���ν����DZ��ָ���������˻���ǰ�˶��Ļ���������ײ������������
���統���˻���ǰ������ת��ʱ����ʱ����в�����˻����ҷ���Ҫ�����ܣ�����ת��Ļ���������תִ�����������ѣ�����DZ���ϲ�������ת�Ļ��������Ҷ�ܣ�ִ�������Ƚ����ף�����DZ����ǿ��������ͼ 12��ʾ����ͼ�в��Ϊ��1�����˻�����ת����в����
 |
| ͼ 12 ���˻��������� Fig. 12 UAV maneuvering direction |
| ͼѡ�� |
���ݲ�ǵĴ�С�Լ���вλ�ý������˻�����DZ����ģ����������Ϊ���˻���ǵķ�Χ[��min����max]��������Ļ����϶���5��ģ�������ֱ�Ϊ�ܲ�һ�㡢ǿ����ǿ�������Ⱥ��������֮ǰ���ƣ���ͼ 13��ʾ��
 |
| ͼ 13 ��в�����Ⱥ��� Fig. 13 Threat membership function |
| ͼѡ�� |
ͬ�������ȼ��ȼ���Ϊ10���ȼ���������Ϊ[1, 10]���ڴ�����Ļ����϶���5��ģ�������ֱ�Ϊ�ܸߡ��ߡ�һ�㡢�͡��ܵͣ���������֮ǰ������ƣ���������
3.2.2 ģ������ ģ�����Ŀ��ƹ�����ʽΪ��IF-THEN���ͣ�����֪ʶ��ǰ��������2�������ڸ������������ƹ������� 1��ʾ��
�� 1 ���ƹ��� Table 1 Set of control rule
| ����� | ����DZ�� | ||||
| ��ǿ | ǿ | һ�� | �� | �ܲ� | |
| �� | �ܸ� | �ܸ� | �� | һ�� | �� |
| ���� | �ܸ� | �� | �� | �� | �� |
| һ�� | �� | �� | һ�� | �ܵ� | �ܵ� |
| ���� | һ�� | �� | �ܵ� | �ܵ� | �ܵ� |
| ���� | �� | �� | �ܵ� | �ܵ� | �ܵ� |
��ѡ��
�������˻�����̶��Լ���ǰ����DZ���������� 1�е�ģ������õ����˻��ı�ײ���ȼ���
��������ײ��ͻ��2�����˻��ı�ײ���ȼ����ʱ��Ҫ�������˻���ս����Ҫ�̶Ƚ������жϣ����糤����Ҫ�̶�Ҫ�����Ż���ͬ�����ȼ����Ż�Ҫ��ܳ�����ս����Ҫ�̶�һ��������ʼǰ��Ҫ��������趨�ã����ں�����Ӧ�á�
4 ����������� Ϊ�������㷨����Ч�ԣ��������з��涼������F15�ɻ�ģ�͡�״̬��ͬ��4�����˻�(UAV1~UAV4)�ɷ�ɢ״̬�γɱ��״̬�������γɱ�ӵ�ͬʱ��ת��������Ժ�һ���η��У����˻�֮��ļ��Ϊ300�Bm�������ٶ�Ϊ170�Bm/s����ӷ��й켣��ͼ 14��ʾ����ӷ���״̬��ͼ 15��ʾ��
 |
| ͼ 14 ���ת����й켣 Fig. 14 Flight path of formation turning |
| ͼѡ�� |
 |
| ͼ 15 ���ת�����״̬ Fig. 15 Flight condition of formation turning |
| ͼѡ�� |
���Կ�����4�����˻����ٶȡ��߶��Լ�ƫ�����ڱ���㷨��������Ѹ�������������ȶ����Ժ�һ���α�ӷ��С�
�ڷ��й����������IJ��Ǽ��ϰ�������һ��������ɽ�ȣ���������2�����˻����зɹ�����ʱ�ڷ�ײ�㷨�������£���ӷ��й켣��ͼ 16��ʾ����ӷ���״̬��ͼ 17��ʾ��
 |
| ͼ 16 ��ӱ��Ϸ��й켣 Fig. 16 Flight path of formation when avoiding obstacle |
| ͼѡ�� |
 |
| ͼ 17 ��ӱ��Ϸ���״̬ Fig. 17 Flight condition of formation when avoiding obstacle |
| ͼѡ�� |
��ͼ 16��ͼ 17�п��Կ�������һ���Ϊ�˶���ϰ���ͨ���ٶ��Լ�����ĵ��������ƹ��ϰ����γ�һ��������ͨ���ϰ�����һ���Σ����Ҹ��ɻ�֮�䱣��һ�����ȫ���룬��ȫ�ƹ��ϰ����������γɺ�һ���Ρ�
�����������ķ��й����У����ڱ��Ҫ���л����Ͷ���ϰ�ʹ�����˻�֮�������ײ��Σ�գ���UAV3Ϊ������һ�λ�����������UAV2����ײ��ͻ������ģ��������������UAV2�����ȼ�Ҫ�ߣ����UAV3Ҫ�����������á�
Ϊ�����ֱ�ײ�㷨����Ч�ԣ�����δ����ײ������������ײ����ʱ������ڻ�����Ϳ������仯������״����ͼ 18��ͼ 19��ʾ��
 |
| ͼ 18 UAV3����ڻ����� Fig. 18 Distance between UAV3 and the nearest neighbor |
| ͼѡ�� |
 |
| ͼ 19 ��ײ���������� Fig. 19 Controlled quantity of collision elimination |
| ͼѡ�� |
��ͼ 18��ͼ 19���Կ�����δ����ײ����������ʱ������ڻ����볬����ȫ���뾯���ߣ�������ײΣ�գ�������ײ����������֮���Կ������ž���Ľӽ�������Ҳ��֮�����ã��������˻����ж�ܣ�����ʹ������뱣���ھ������֮�⡣
5 ���� 1)�����˻����յ����ߵı�ӷ��п��Ʒ��������Ա�֤�����ָ�������ȶ����С�
2)����ͻ���ϰ��������ģ�ͣ���֤�������˳����ܣ�ͬʱ���ǹ�ܹ��������˻�֮�����ײ��
3)�����˷ɻ�֮��ı���ģ�ͣ�������ģ���������˱�ײ���ȼ���ƣ��ڱ�ײ��ͬʱ������С��ӵ��Ŷ���
�����
| [1] | WANG P K C. Navigation strategies for multiple autonomous mobile robots moving in formation[J].Journal of Robotic System, 1991, 9(2): 177�C195. |
| [2] | ����, κ��, ������. ����һ�����㷨��ʱ�Ӷ����˻���ӷ�ɢ������[J].�����Ӧ��, 2014, 34(S1): 151�C155.DING Y, WEI C, BAO S Y. Formation control for multiple UAVs with time delay based on consensus algorithm[J].Journal of Computer Applications, 2014, 34(S1): 151�C155.(in Chinese) |
| [3] | WEITZ L A, HURTADO J E, SINCLAIR A J. Decentralized cooperative-control design for multivehicle formations[J].Journal of Guidance, Control, and Dynamics, 2008, 31(4): 970�C979.DOI:10.2514/1.33009 |
| [4] | KRISTIANSEN R, LORIA A, CHAILLET A, et al. Spacecraft relative rotation tracking without angular velocity measurements[J].Automatica, 2009, 45(3): 750�C756.DOI:10.1016/j.automatica.2008.10.012 |
| [5] | ��׳, ףСƽ, ����, ��. ���˻���ӻ�������ʱ�Ķ��α��ַ�������[J].������ҵ��ѧѧ��, 2015, 33(1): 26�C32.SHAO Z, ZHU X P, ZHOU Z, et al. A formation keeping feedback control for formation flight of UAVs[J].Journal of Northwestern Polytechnical University, 2015, 33(1): 26�C32.(in Chinese) |
| [6] | REN W, SORENSEN N. Distributed coordination architecture for multi-robot formation control[J].Robotics and Autonomous Systems, 2008, 56(4): 324�C333.DOI:http://html.rhhz.net/BJHKHTDXXBZRB/10.1016/j.robot.2007.08.005 |
| [7] | REN W. Decentralization of virtual structure in formation control of multiple vehicle systems via consensus strategies[J].European Journal of Control, 2008, 14(2): 1�C11. |
| [8] | ��˼��, ����, �ź�, ��. ���˻���ӵĹ���ʱ�����[J].��������, 2012, 19(3): 1�C5.HUA S L, YOU Y, ZHANG H, et al. Receding horizon control of UAV formations[J].Electronics Optics & Control, 2012, 19(3): 1�C5.(in Chinese) |
| [9] | FAHIMI F. Non-linear model predictive formation control for groups of autonomous surface vessels[J].International Journal of Control, 2007, 80(8): 1248�C1259.DOI:10.1080/00207170701280911 |
| [10] | KEVICAKY T, BORRELLI F, FREGENE K, et al. Decentralized receding horizon control and coordination of autonomous vehicle formations[J].IEEE Transactions on Control System Technologies, 2008, 16(1): 19�C33.DOI:10.1109/TCST.2007.903066 |
| [11] | KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[J].International Journal of Robotics Research, 1986, 5(1): 290�C298. |
| [12] | BALCH T, ARKIN R C. Behavior-based formation control for multirobot teams[J].IEEE Transaction on Robotics and Automation, 1998, 14(6): 926�C939.DOI:10.1109/70.736776 |
| [13] | �ܽ���, ��־��, �߳�, ��. ����Ⱥ��˼��Ķ��������ӱ����㷨�о�[J].ϵͳ����ѧ��, 2014, 26(3): 562�C566.CAO J F, LING Z H, GAO C, et al. Obstacle avoidance and formation control for multi-agent based on swarming[J].Journal of System Simulation, 2014, 26(3): 562�C566.(in Chinese) |
| [14] | ������, ������, ����, ��. ���˻���̬��ײ����ģ�����о�[J].��������, 2014, 21(12): 30�C35.XU J G, WANG H L, LIU C, et al. Modeling of dynamic collision avoidance zone for UAVs[J].Electronics Optics & Control, 2014, 21(12): 30�C35.(in Chinese) |
| [15] | LALISH E, MORGANSEN K A, TSUKAMAKI T.Formation tracking control using virtual structures and deconfliction[C]//Proceedings of the 45th IEEE Conference on Decision and Control 2006. Piscataway, NJ:IEEE Press, 2006:5699-5705. |
