针对气动伺服弹性问题,国内外****在弹性飞行器的相关理论计算方面已有较多研究[3-6];在试验方面,国外的研究包括波音公司对联翼布局传感器飞机的气动伺服弹性风洞试验[7],以及之前有关F-18E/F战斗机和X-45无人战斗机的气动弹性系统设计和试验[8-9]等;国内章俊杰[10]开展过飞机气动伺服弹性横侧向风洞试验的研究。然而,这些试验大多集中于专门研究飞行器的气动伺服弹性系统,对于其他带反馈控制的风洞试验出现气动伺服弹性失稳故障的问题,国内外鲜有报道。
在已完成的某特种风洞试验中,试验模型安装有反馈控制系统,且为较刚硬的结构,但事先未考虑到支持结构的弹性,模型安装到支持结构上后,导致整个系统的结构、控制及气动之间发生耦合,出现气动伺服弹性失稳。本文针对该试验中出现的失稳情况进行现象描述,开展失稳机理分析和相关数值仿真,针对控制系统提出改进方法,并最终成功应用到试验中。
1 风洞试验描述 1.1 试验概况 试验模型为一种非常规构型飞行器,在本试验中共有4个操纵面用以纵向控制:即位于飞行器质心前的2个鸭翼操纵面和位于质心后的2个升降舵操纵面。在试验中进行控制时,4个操纵面同时接收信号并偏转。
该特种风洞试验概况如图 1所示,试验模型与支持钢架在A点处相连,此处安装有测力天平,天平可测得模型在气流中所受各个方向的力和力矩。控制计算机将所测升力信号(竖直方向)首先解算成过载信号,经过控制律传递函数并乘以不同的控制增益,转化为4个操纵面的控制信号,反馈回路如图 2所示。试验中认为升力远大于惯性力,因此将升力除以重力结果作为纵向过载。
 |
| 图 1 风洞试验示意图 Fig. 1 General sketch of wind tunnel test |
| 图选项 |
 |
| 图 2 控制系统反馈回路 Fig. 2 Feedback loop of control system |
| 图选项 |
试验前认为模型较刚硬,其弹性频率足够高,不会干扰试验结果,但事先未考虑到加入支持结构后对整个系统弹性振动的影响。之后模态试验测得整个支持系统的第1阶模态3 Hz(类似试验模型沉浮)、第2阶模态5 Hz,其具体模态振型如图 3所示,试验中失稳主要发生在绕O点旋转即图中θ所代表的俯仰方向上,具体分析见第2节。
 |
| 图 3 试验模型模态振型图 Fig. 3 Mode shapes of test model |
| 图选项 |
1.2 失稳现象描述 表 1给出了不同来流风速、控制增益下的响应情况。每个试验条目存在开环和闭环2种控制状态,控制增益仅对闭环状态而言。本试验为研究某主动控制系统的控制效果,将控制增益作为一个影响参数来研究,因此各试验条目设置了不同大小的增益。由表 1可看出,相同来流速度下,控制增益越大,越有可能发生失稳现象,如试验条目001与003、试验条目004与006;相同控制增益下,来流速度越大,越有可能发生失稳现象,如试验条目002与006。将试验条目004与006的实测数据画出如图 4和图 5所示。
表 1 各试验条件下模型过载响应 Table 1 Load factor response of model under different test conditions
| 试验条目 | 控制增益 | 来流速度/(m·s-1) | 开环过载响应 | 闭环过载响应 |
| 001 | 2.0 | 25 | 静止 | 静止 |
| 002 | 3.0 | 25 | 静止 | 静止 |
| 003 | 4.0 | 25 | 静止 | 振动发散 |
| 004 | 1.0 | 30 | 静止 | 静止 |
| 005 | 2.0 | 30 | 静止 | 静止 |
| 006 | 3.0 | 30 | 静止 | 振动发散 |
表选项
 |
| 图 4 风速30 m/s,控制增益1.0下过载响应(试验004) Fig. 4 Load factor response with air velocity 30 m/s and control gain 1.0 (test 004) |
| 图选项 |
 |
| 图 5 风速30 m/s,增益3.0下过载响应(试验006) Fig. 5 Load factor response with air velocity 30 m/s and control gain 3.0 (test 006) |
| 图选项 |
将试验数据做频谱分析如图 6所示,可见闭环响应在5 Hz频率左右幅值较大。在没有定频信号激励的情况下,试验模型却出现了5 Hz的振动且发散,说明风洞中来流的微小扰动激起了系统某阶弹性模态;同时,这种失稳与控制增益有关,表明控制系统也参与了耦合。因此,初步可以确定系统出现了弹性结构与控制系统的耦合。为更进一步验证气动力是否也参与耦合,增做表 2所示各试验条目:在无风情况下,闭合控制系统,在某一时间点施加人工激励,检查响应是否发散。
 |
| 图 6 风速30 m/s,增益3.0下过载频谱分析(试验006) Fig. 6 Frequency analysis of load factor response with air velocity 30 m/s and control gain 3.0 (test 006) |
| 图选项 |
表 2 各控制增益下试验模型过载(无来流) Table 2 Load factor response of test model under different control gains (air velocity 0 m/s)
| 试验条目 | 控制增益 | 来流速度/(m·s-1) | 激励前过载响应 | 激励后过载响应 |
| 007 | 4.0 | 0 | 静止 | 随时间收敛 |
| 008 | 6.0 | 0 | 静止 | 随时间收敛 |
| 009 | 10.0 | 0 | 静止 | 随时间收敛 |
表选项
伺服弹性稳定性试验如图 7所示,没有气动力作用情况下,在8 s附近施加人工激励后,过载响应有随时间逐渐收敛的趋势。因此可以确定没有气动力情况下,该伺服弹性系统是稳定的,即从另一面证明了之前试验中气动力确实参与了耦合,响应发散原因应该为气动伺服弹性失稳。
 |
| 图 7 无来流,控制增益10.0下过载响应(试验009) Fig. 7 Load factor response with air velocity 0 m/s and control gain 10.0 (test 009) |
| 图选项 |
2 机理分析和数值仿真 2.1 失稳原因 下面通过构建、推导运动微分方程定性分析失稳原因。为简化,首先给出以下前提条件或假设:
1) 图 8中θ与模型飞机的真实迎角和俯仰角大小及方向一致。
 |
| 图 8 简化后风洞试验结构力学模型 Fig. 8 Simplified structural dynamic model of wind tunnel test |
| 图选项 |
2) 使用图 8中等效扭转弹簧(刚度系数为kθ)来模拟支持系统,重点研究支持系统第2阶模态的影响。且有

3) 控制过程中,舵面偏转方向和升力变化方向相反。简化处理后,可将操纵面的偏转与升力间的传递函数写作:δ=-KcFy,且Kc>0,δ为舵面指令,Kc为反馈增益,Fy为升力。
4) 模型飞机满足静稳定性。
5) 模型绕O点振动未达到临界迎角。
因此,图 8中θ对应自由度上有
 | (1) |
式中:c为系统阻尼;Aθθ为θ引起的对O点的气动力矩;A

 | (2) |
式中:Cyθ和Cy
注意到,由于参考点的不同,这里的角θ作用并非完全等价于飞机的俯仰角或迎角:角速度
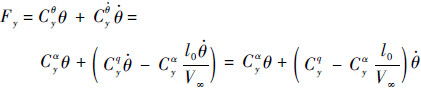 | (3) |
式中:Cyα为升力对迎角α的导数且Cyα>0;Cyq为升力对俯仰角速度q的导数;l0为模型质心CG和O点间距离;V∞为来流速度,经计算

 | (4) |
将式(4)代入式(1)得
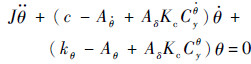 | (5) |
若Aδ为正(注意Aδ>0表示操纵面偏转引起对O点正力矩,而非对模型质心CG点),则增益系数Kc增大到一定程度时,阻尼项(c-A
 | (6) |
式中:ωn为系统无阻尼自然频率;ξ为系统阻尼比。若0>ξ>-1,系统将有一对实部为正的共轭复根,系统时间响应具有发散振荡的特性[11]。因此,第1.2节所述失稳问题的主要原因可归结为
1) 试验前未考虑到加装支持钢架后整个系统的弹性模态。
2) 在试验过程中开启控制系统后,各个操纵面的偏转也会产生不利于稳定的气动力矩。
综上原因,支持系统的弹性与气动力矩以及控制系统发生不利耦合,导致系统气动伺服弹性不稳定。
2.2 仿真建模 为验证上述推导的正确性,下面建立系统状态方程进行仿真。实际情况下的控制系统,将天平所测升力解算成过载,作为反馈信号计算舵偏,过载变化可写作θ和
 | (7) |
那么,将θ和
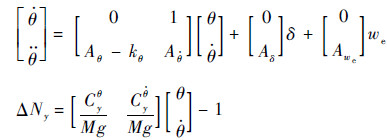 | (8) |
以方程式(8)为基础,构建MATLAB/Simulink?模型,如图 9所示,调整控制面1、2回路增益和控制面3、4回路增益,使得Aδ为正以满足失稳条件。数值模型的相关几何、质量、气动等参数如表 3所示。
 |
| 图 9 气动伺服弹性系统Simulink仿真模型 Fig. 9 Simulink simulation model of aeroservoelastic system |
| 图选项 |
表 3 数值仿真模型相关基本参数 Table 3 Related basic parameters of numerical simulation model
| 参数 | 项目 | 数值 |
| 几何参数 | 参考弦长/m | 0.20 |
| 参考面积/m2 | 1.40 | |
| 质量惯量参数 | 质量/kg | 43.0 |
| 绕 O点转动惯量/(kg·m2) | 8.40 | |
| 飞行参数 | 飞行速度/(m·s-1) | 30.0 |
| 空气密度/(kg·m-3) | 1.225 | |
| 弹性结构参数 | 等效扭转弹簧刚度/(kg·m2·s-2) | 8 290 |
| 固有频率/Hz | 5.00 | |
| 模型质心距 O点长度/m | 0.4 | |
| 相关气动导数 | Cyα/(N·(°)-1) | 88.056 |
| CMα/(N·m·(°)-1) | -1.294 | |
| Cyq/(N·s·(°)-1) | 9.074 | |
| CMq/(N·m·s·(°)-1) | -1.474 | |
| Aθ/(N·m·(°)-1) | 349.93 | |
| Aδ/(N·m·(°)-1) | 20.101 | |
| Aθ·/(N·m·s·(°)-1) | -12.14 |
表选项
2.3 仿真结果 图 10模拟风洞来流中的微小扰动,通过仿真给出扰动下的过载响应,分别讨论了无控、小增益、大增益3种情况下的过载响应,其中小增益和大增益控制参数下的仿真结果如图 11所示。在无控和小增益系数情况下,过载响应最终均趋于平稳,而大增益情况下仿真模型过载出现振动发散。
 |
| 图 10 数值仿真小扰动激励 Fig. 10 Small disturbance excitation in numerical simulation |
| 图选项 |
 |
| 图 11 小扰动激励下仿真的过载响应 Fig. 11 Load factor response due to small disturbance excitation in simulation |
| 图选项 |
施加小扰动激励仿真模型的过载频谱分析如图 12所示,在较大控制增益情况下,响应出现了频率5 Hz左右的振动发散,而小增益下的响应在5 Hz频率的幅值很小。
 |
| 图 12 小扰动激励下仿真的过载频谱分析 Fig. 12 Frequency analysis of load factor response due to small disturbance excitation in simulation |
| 图选项 |
为使结果更明显,下面仿真中施加连续sin型激励如图 13所示,图 14则给出了开环、闭环情况下的响应情况,频谱分析如图 15所示。可见,开环响应主要幅值集中在激励频率4 Hz附近,几乎没有5 Hz振动;而闭环响应在弹性频率5 Hz左右的幅值较大,这说明在闭环情况下,控制、弹性结构以及气动力发生了不利耦合,这也解释了图 14(b)中的振动发散情况,注意到图 14(b)中的类似“拍”响应是由于在失稳临界状态,系统的振动响应包含2个部分:一部分是系统失稳引起的,其振动频率是失稳频率(5 Hz左右);另一部分是外部简谐激励引起的,其振动频率等于激励频率(4 Hz左右)。这2部分频率相近,振幅相差不大,迭加在一起形成“拍”[12]。
 |
| 图 13 数值仿真中连续sin型激励(频率4 Hz) Fig. 13 Continuous ‘sin’ type excitation in numerical simulation (frequency 4 Hz) |
| 图选项 |
 |
| 图 14 连续sin型激励下仿真的过载响应 Fig. 14 Load factor response due to continuous ‘sin’ type excitation in simulation |
| 图选项 |
 |
| 图 15 连续sin型激励下仿真的过载频谱分析 Fig. 15 Frequency analysis of load factor response due to continuous ‘sin’ type excitation in simulation |
| 图选项 |
通过以上2种形式激励下的仿真验证了机理分析的正确性,说明失稳原因确实是由于不稳定的力矩及支持系统的弹性引起的。
3 改进设计 3.1 改进方案及仿真 针对以上出现的气动伺服弹性失稳问题,结合分析结果,对控制系统提出了以下2种改进方案:
1) 根据相关文献[13-15],在控制系统反馈回路中增加结构陷波器环节,其传递函数可写为
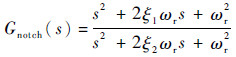 | (9) |
式中:ωr为陷波器中心频率。
针对本文中情况,选取ξ1=0.05,ξ2=0.5,ωr=5·2π=31.42 rad/s。通过“挖去”频带中带来危险的频率以改善气动伺服弹性稳定性,结构陷波器传递函数的伯德图如图 16所示。
 |
| 图 16 结构陷波器环节的伯德图 Fig. 16 Bode diagram of structural notch filter |
| 图选项 |
2) 改变鸭翼和升降舵的偏转比例增益,使得绕O点气动力矩对操纵面偏转的导数Aδ≤0。这样,阻尼项将始终为正,但也改变了控制系统原先设置的一些参数。
就以上2种改进方案,分别进行仿真分析。依然施加连续激励如图 13所示,其闭环条件下的过载响应如图 17和图 18所示,2种改进方案均能起到抑制气动伺服弹性失稳的效果。
 |
| 图 17 改进方案1过载响应及频谱分析 Fig. 17 Load factor response and frequency analysis with Solution 1 |
| 图选项 |
 |
| 图 18 改进方案2过载响应及频谱分析 Fig. 18 Load factor response and frequency analysis with Solution 2 |
| 图选项 |
3.2 实际应用 在实际风洞试验中,考虑到控制参数变化可能对预期的控制效果产生影响,因此实际选取改进方案1,即在控制回路中添加结构陷波器,从而避免改动控制参数。加装滤波器后,试验中不再出现气动伺服弹性失稳现象,改进方案被证实是可行有效的。具体地,表 4列出了改进控制系统后各试验条件下的过载响应情况,试验条目011即增益3.0下的过载和操纵面偏转响应曲线在图 19中给出。
表 4 各增益下试验模型过载响应(控制系统改进后) Table 4 Load factor response under different control gains (after control system improvement)
| 试验条目 | 控制增益 | 来流速度/( m·s-1) | 开环过载响应 | 闭环过载响应 |
| 010 | 1.0 | 30 | 静止 | 静止 |
| 011 | 3.0 | 30 | 静止 | 静止 |
| 012 | 5.0 | 30 | 静止 | 静止 |
表选项
 |
| 图 19 试验中使用改进方案1后过载和舵偏响应(试验011) Fig. 19 Load factor response and control surface deflection with Solution 1 in real test (test 011) |
| 图选项 |
4 结 论 本文针对某特种风洞试验中出现的气动伺服弹性失稳现象进行了机理分析和数值仿真,在此基础上对控制系统提出了2种改进意见并对改进方案仿真验证,最后将一种改进方案运用到了试验中,取得了满意的效果。
1) 在带控制的特种风洞试验中,需要特别注意气动伺服弹性问题。不仅要关注试验模型的弹性效应,也要将整个支持系统的弹性影响纳入考虑。
2) 飞行器实际飞行过程中,往往关心的是偏转操纵面对飞行器质心力矩的影响;但在风洞试验中,模型安装在支架上,为防止类似气动伺服弹性问题发生,也要关注偏转操纵面对支架各部位产生的力矩影响。
3) 为减小或消除弹性模态的不利影响,在控制回路中增加合适的结构陷波器是一种有效的工程设计方法。
参考文献
| [1] | 杨超, 吴志刚, 万志强, 等. 飞行器气动弹性原理[M].北京: 北京航空航天大学出版社, 2011: 148-167.YANG C, WU Z G, WAN Z Q, et al. Principle of aircraft aeroelasticity[M].Beijing: Beihang University Press, 2011: 148-167.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [2] | 杨超, 吴志刚. 导弹气动伺服弹性稳定性分析[J]. 飞行力学,2000, 18(4): 1–5.YANG C, WU Z G. Aeroservoelastic stability of missile[J]. Flight Dynamics,2000, 18(4): 1–5.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [3] | FELT L R, HUTTSELL L J, NOLL T E, et al. Aeroservoelastic encounters[J]. Journal of Aircraft,1979, 16(7): 477–483. |
| Click to display the text | |
| [4] | KARPEL M. Procedures and models for aeroservoelastic analysis and design[J]. Journal of Applied Mathematic and Mechanics,2001, 40(6): 579–592. |
| Click to display the text | |
| [5] | KARPEL M, MOULIN B, IDAN M. Robust aeroservoelastic design with structural variations and modeling uncertainties[J]. Journal of Aircraft,2003, 40(5): 946–954. |
| Click to display the text | |
| [6] | GUPTAT K, MEEKJ L. Finite element multidisciplinary analysis[M].Reston: AIAA, 2003: 295-310. |
| Cited By in Cnki (0) | |
| [7] | REICHENBACH E,CASTELLUCCIO M,SEXTON B.Joined wing sensorcraft aeroservoelastic wind tunnel test program:AIAA-2011-1956[R].Reston:AIAA,2011. |
| Click to display the text | |
| [8] | PITT D M,HAYES W B,GOODMAN C E.F/A-18E/F aeroservoelastic design,analysis and test:AIAA-2003-1880[R].Reston:AIAA,2003. |
| Click to display the text | |
| [9] | REICHENBACH E,DAVIDSON R.Aeroservoelastic design and test of the X-45A unmanned combat air vehicle:AIAA-2003-1883[R].Reston:AIAA,2003. |
| Click to display the text | |
| [10] | 章俊杰. 飞机的气动伺服弹性横侧向风洞试验研究[J]. 北京航空航天大学学报,2003, 29(2): 120–123.ZHANG J J. Wind tunnel test for roll/lateral aeroservoelasticity of aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics,2003, 29(2): 120–123.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [11] | 孟庆明. 自动控制原理[M].北京: 高等教育出版社, 2008: 67-68.MENG Q M. Principle of automatic control[M].Beijing: Higher Education Press, 2008: 67-68.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [12] | 邢誉峰, 李敏. 工程振动基础[M].北京: 北京航空航天大学出版社, 2011: 38-39.XING Y F, LI M. Basics of vibration engineering[M].Beijing: Beihang University Press, 2011: 38-39.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [13] | YAMASHIRO H,STIRLING R.Reduction of flight control system/structure mode interaction:AIAA-2007-6381[R].Reston:AIAA,2007. |
| Click to display the text | |
| [14] | 楚龙飞, 吴志刚, 杨超, 等. 导弹自适应结构滤波器的设计与仿真[J]. 航空学报,2011, 32(2): 195–201.CHU L F, WU Z G, YANG C, et al. Dsign and simulation of adaptive structure filter for missiles[J]. Acta Aeronautica et Astronautica Sinica,2011, 32(2): 195–201.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [15] | 吴志刚, 杨超. 弹性导弹的连续与离散阵风响应[J]. 北京航空航天大学学报,2007, 33(2): 136–140.WU Z G, YANG C. Discrete and continuous gust response of elastic missile[J]. Journal of Beijing University of Aeronautics and Astronautics,2007, 33(2): 136–140.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
