全文HTML
--> --> -->Pekeris[1]首次提出简正波模型, 解决了液态海底条件下两层水平分层介质中的水中点源爆炸声传播问题. Press和Ewing [2]将Pekeris提出的简正波模型扩展到包含弹性海底的情况, 解决了弹性海底条件下的水平分层介质中的爆炸声传播问题. Porter和Reiss [3]采用有限差分方法, 数值计算弹性海底水平分层介质中的简正波声传播. Ainslie[4]计算了多层弹性海底条件下水平分层介质中的纵波和横波反射和传播系数. Schneiderwind等[5]研究了水平分层弹性Pekeris波导条件下的声场简正波解, 并通过水池实验加以验证.
实际海洋环境随距离变化, 导致各阶简正波之间的耦合效应. Pierce[6]首次将简正波声场分析方法扩展到距离依赖海洋环境中, 提出了简正波耦合模型. Chwieroth等[7]将耦合简正波方法用于随距离变化的抛物线声速模型, 分析了该环境下的简正波能量转移. Williams[8]分析了随距离线性变化海深条件下, 上坡和下坡时的前两阶简正波之间的能量耦合. Rutherford和Hawker [9]分析了倾斜海底环境的边界条件, 用修正边界条件对简正波耦合理论做了一阶能量守恒修正. McDaniel[10]分析了常量坡度倾斜液态海底条件下的简正波能量交换, 发现了靠近截止频率的简正波对连续谱简正波的强烈耦合效应. Evans[11]采用距离步进简正波耦合模型, 考虑了水深随距离变化带来的反向散射, 以及有限阶传播简正波之间的耦合. Porter等[12]采用改进边界条件, 解决了倾斜海底阶梯近似中的单向抛物方程模型能量守恒问题. Abawi和Kuperman [13]采用耦合简正波抛物方程模型, 计算距离依赖海洋环境下的声场, 处理简正波之间以及不同方位角之间的能量耦合. Knobles等[14]采用双向积分耦合简正波方法, 分析大陆架海域的声传播, 既包括离散谱, 也包括连续谱, 并且用泄漏模态近似表示连续谱. 莫亚枭等[15]提出了一种满足能量守恒的双向简正波耦合方法, 实现了非水平分层波导中的双向场的准确计算.
弹性海底情况下, 简正波耦合问题变得更加复杂. Kennett[16]分析了水平变化海洋环境下的弹性简正波耦合, 包括了前向和后向传播的简正波. Odom[17]研究了随距离变化海深弹性海底条件下, 简正波之间的耦合, 包括与连续谱的耦合. Hall[18]通过测量垂直于海底的深度, 解决了倾斜海底时简正波之间耦合系数的计算错误; 发现, 浅水倾斜海底环境下, 负声速梯度导致了简正波耦合系数增大. Maupin[19]采用局地简正波耦合方法处理距离依赖的弹性海底海洋环境, 分析了二维声场中的Love波和Rayleigh波之间的简正波能量转移. Collins[20]采用能量守恒抛物方程方法, 解决涉及倾斜海底界面波传播的问题, 以及涉及简正波截止和耦合至海底剪切波束的问题. Collins和Siegmann [21]对弹性抛物方程进行声能流密度守恒修正, 处理距离依赖海深时的声场. Jeroen[22]分析了海底地形变化条件下, 界面波传播中的简正波耦合, 而Abawi和Porter [23]将该成果应用于倾斜弹性海底条件下的耦合简正波传播, 得到了该条件下的纵波和横波声压. Odom等[24]将弹性海底中的倾斜边界条件转换为与距离导数无关的项, 从而简化了弹性海底时的简正波耦合. Abawi和Porter [25]采用虚源法计算楔形弹性海底条件下的声场, 得到了和弹性抛物方程方法一致的结果. Xie等[26]采用拉格朗日谱元法, 分析半无限空间中的流体-固体耦合问题, 处理距离有关海洋环境中的声传播问题.
在海洋环境随着距离发生变化的情况下, 简正波耦合的计算过程中会受到一些因素的影响. 1个典型的影响是, 特征方程中, 垂直波数的计算往往会选取Pekeris割线法, 而特定环境下, 算出的本征值过于接近割线位置, 导致本征值出现较大的误差, 甚至搜根失败, 严重影响最终的简正波归一化和耦合结果. 为了消除Pekeris割线对声场计算的影响, 一些****采用了多种方法来处理. 骆文于等[27]采用稳定的深度格林函数, 结合波数积分方法, 得到了简正波水平波数接近海底波数时的准确声压. 而莫亚枭等[28]采用复等效深度法, 提高了波导简正波本征值位于割线枝点附近情况下声传播损失的计算精度. Chapman等[29]采用等效深度法处理弹性Pekeris波导中的声传播问题, 得到了精确的简正波相速度. McCollom和Collis [30]采用格林函数处理弹性海底Pekeris波导中的简正波求解问题. Zhang和Tindle [31]将采用复等效深度法, 处理浅海弹性海底时的简正波求解问题, 包含了“泄漏”模态. Stickler[32]采用割线积分方法处理“泄漏”简正波, 发现了割线积分对浅水声场的显著贡献. Westwood和Koch [33]采用弱正梯度声速半无限空间近似方法, 在液态海底环境下, 消除了Pekeris割线附近的简正波计算误差; Westwood等[34]还将此方法应用于弹性海底情况, 结合等效反射系数和等效深度方法修正本征值.
前人的工作, 多从位移和应力张量的角度, 将耦合简正波分为局地简正波, 和与距离有关的简正波幅度, 并采用耦合差分方程来计算简正波幅度, 从而得到弹性海底时, 海洋环境变化情况下的声场. 然而, 局地简正波阶梯近似的方法, 多见于液态海底的情况; 弹性海底时, 这方面的分析较少, 而且多局限于“受限”的简正波, 很少有对“泄漏”简正波的分析. 而本文将简正波耦合扩展到包含“泄漏”简正波的情况, 建立了复本征值弹性耦合简正波模型. 在距离依赖弹性海底的海洋环境中, 该模型提高了对声传播损失的预报精度. 此外, 还将能量守恒近似扩展以包含复数本征值(泄漏简正波), 来保证结果的准确性. 本文还分析了倾斜弹性海底条件下的简正波耦合效应, 发现了泄漏模态对简正波耦合系数的影响, 以及由此导致的简正波声压相位和幅度的复杂变化.
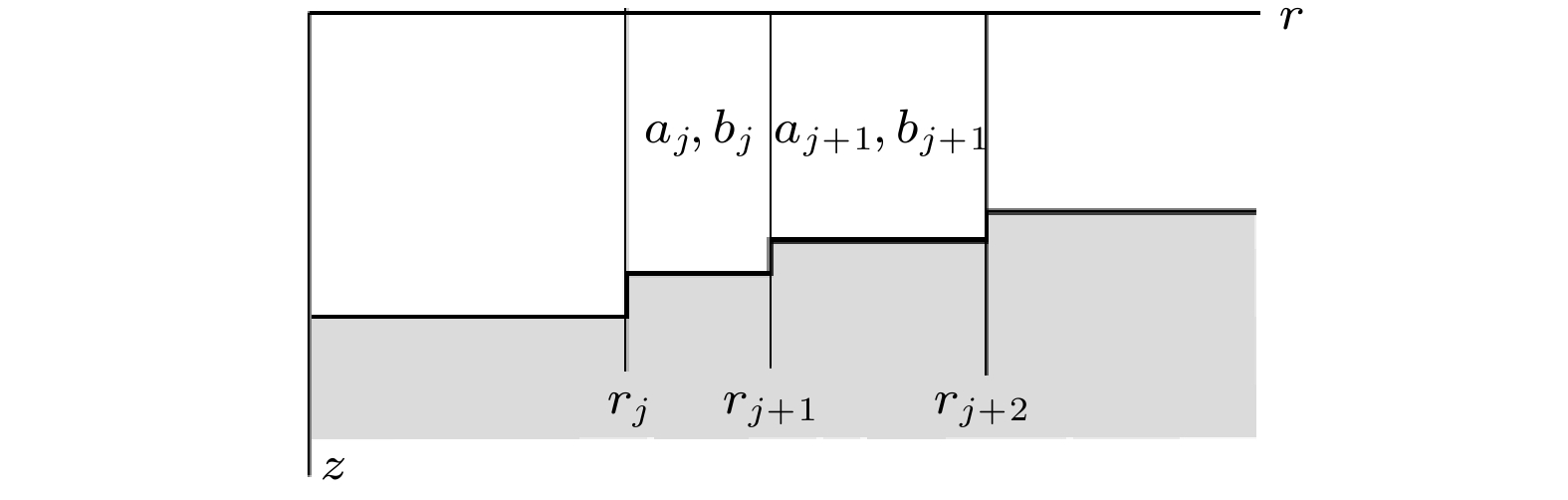 图 1 水平变化弹性海底的分段阶梯近似
图 1 水平变化弹性海底的分段阶梯近似Figure1. Stepwise approximation of a horizontally varying elastic seabed.
2
2.1.弹性波导中声场的运动方程
在弹性海底水平变化波导中激发起的声场, 其应力t和质点位移w满足的运动方程如下:


下文中, 定义t = t1 = (τxx, τxz), 位移应力矢量u = (w, t)T. 从而得到







2
2.2.复本征值简正波归一化
二维距离依赖介质中的声传播问题可以通过距离无关介质中的本征函数来解决. 运动方程(10)的各向同性局部简正波解可以写成:
我们发现, 在本征值为复数的情况下, 根据特征方程[5]
2
2.3.复本征值简正波正交性
在复本征值条件下, 以往的简正波正交性条件[19]不再成立, 需要给出新的适用于复数本征值kn(x)的正交性推导. 定义局地本征函数um和un的标量积如下:



根据(14)—(16)式进行简正波归一化, 采用了简正波幅度Am的共轭相乘, 归一化除法因子含有






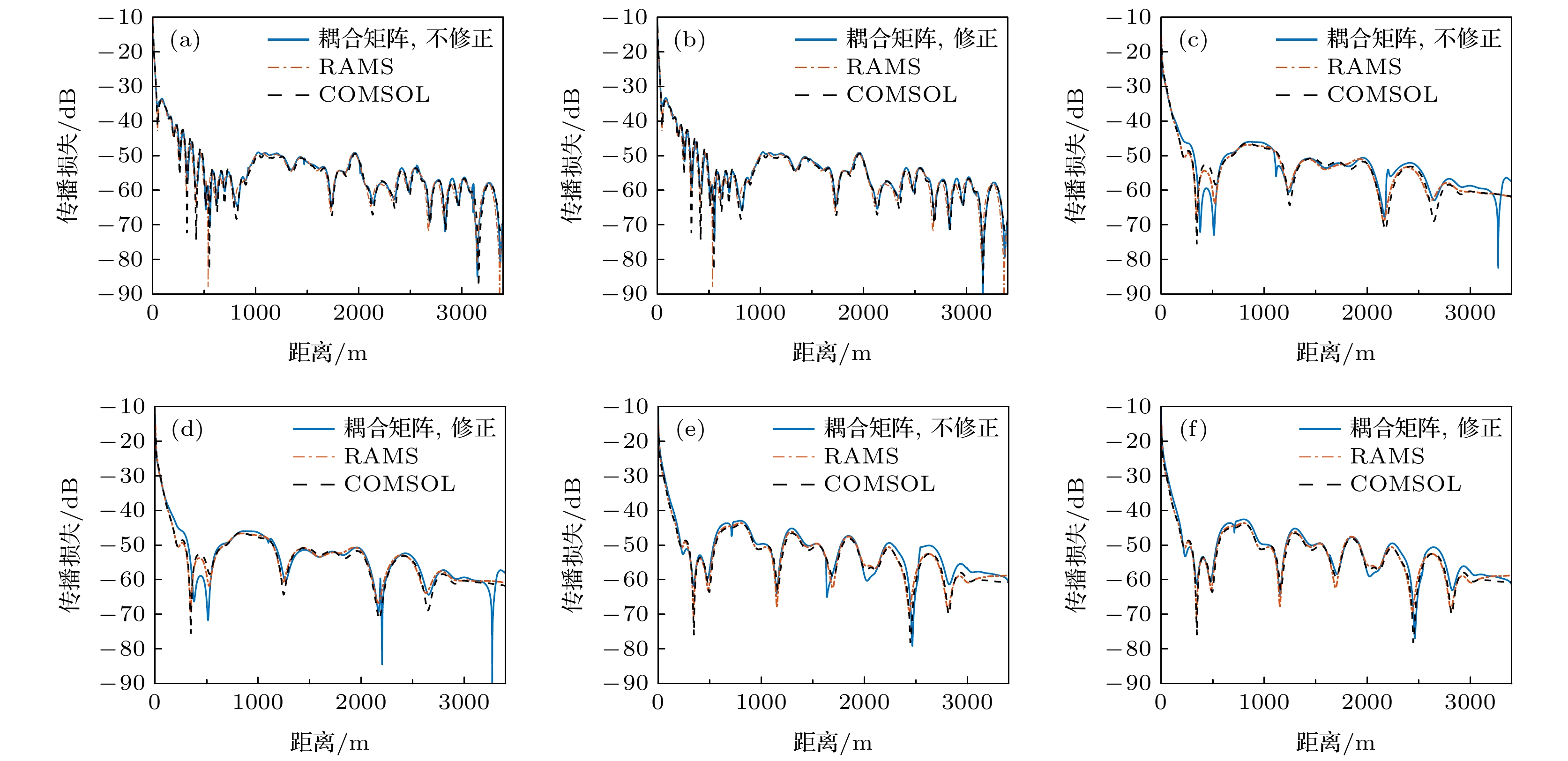 图 3 是否考虑幅度相位处理的
图 3 是否考虑幅度相位处理的
Figure3. Sound pressure obtained by the method in this paper when (a) f = 50 Hz, without, (b) f = 50 Hz, with, (c) f = 25 Hz, without, (d) f = 25 Hz, with, (e) f = 25 Hz, cs = 2000 m/s, without, (f) f = 25 Hz, cs = 2000 m/s, with considering the normalization of amplitude and phase processing, compared with the sound pressure obtained by RAMS and COMSOL.
2
2.4.包含泄漏模态的耦合简正波模型
基于上述归一化, 只考虑沿着x轴正方向传播的简正波, 有由此得到海洋环境随距离变化时, 弹性海底条件下的简正波耦合系数表达式, 用以计算该条件下的水中声压. 需要特别说明的是, (C1)式的结果, 和参考文献[24]中的耦合系数表达式(A1)有所不同. 这个不同的结果, 使得kn(x)为复数时, 仍满足参考文献[24]中给出的能量守恒表达式(27), 而文献[24]中的耦合系数表达式(A1), 仅适用于实数kn(x)的情况, 而对复数kn(x)失效. 文献[24]中的结果不能用于复数本征值, 也就是相应的泄漏模态, 在利用耦合简正波方法计算声场的时候, 仅考虑实数本征值, 会带来较大的声压计算误差. 而本文提出的改进方法, 则能够将该耦合简正波方法推广到包含复数本征值的情况, 得到的声压更加接近较为成熟的弹性声场计算方法, 如RAMS和有限元商用软件COMSOL. 这些结果将会在仿真分析部分予以展示.
以上推导了包含泄漏模态时的弹性海底条件下的简正波归一化, 修正了能量守恒, 推导了耦合简正波表达式, 得到了距离依赖弹性海底海洋环境下的声场模型. 接下来, 将对这些模型进行仿真, 与经典声场计算方法进行对比检验.
3.1.模型对标准检验问题的计算
33.1.1.弹性海底和液态海底的水中声压对比
分别用本文提出的简正波耦合方法(图2中标注为“耦合矩阵”, 下同. 下文简称为“本文方法”)、RAMS、有限元商用软件COMSOL计算弹性海底时的水中声场(本文方法和RAMS计算声场的水平步长均为1 m, 下同), 用Couple07, RAM计算液态海底时的水中声场. zs和zr分别表示声源和接收深度, zs = zr = 30 m, 声波频率f = 50 Hz, 海洋环境和所得声压如图2所示.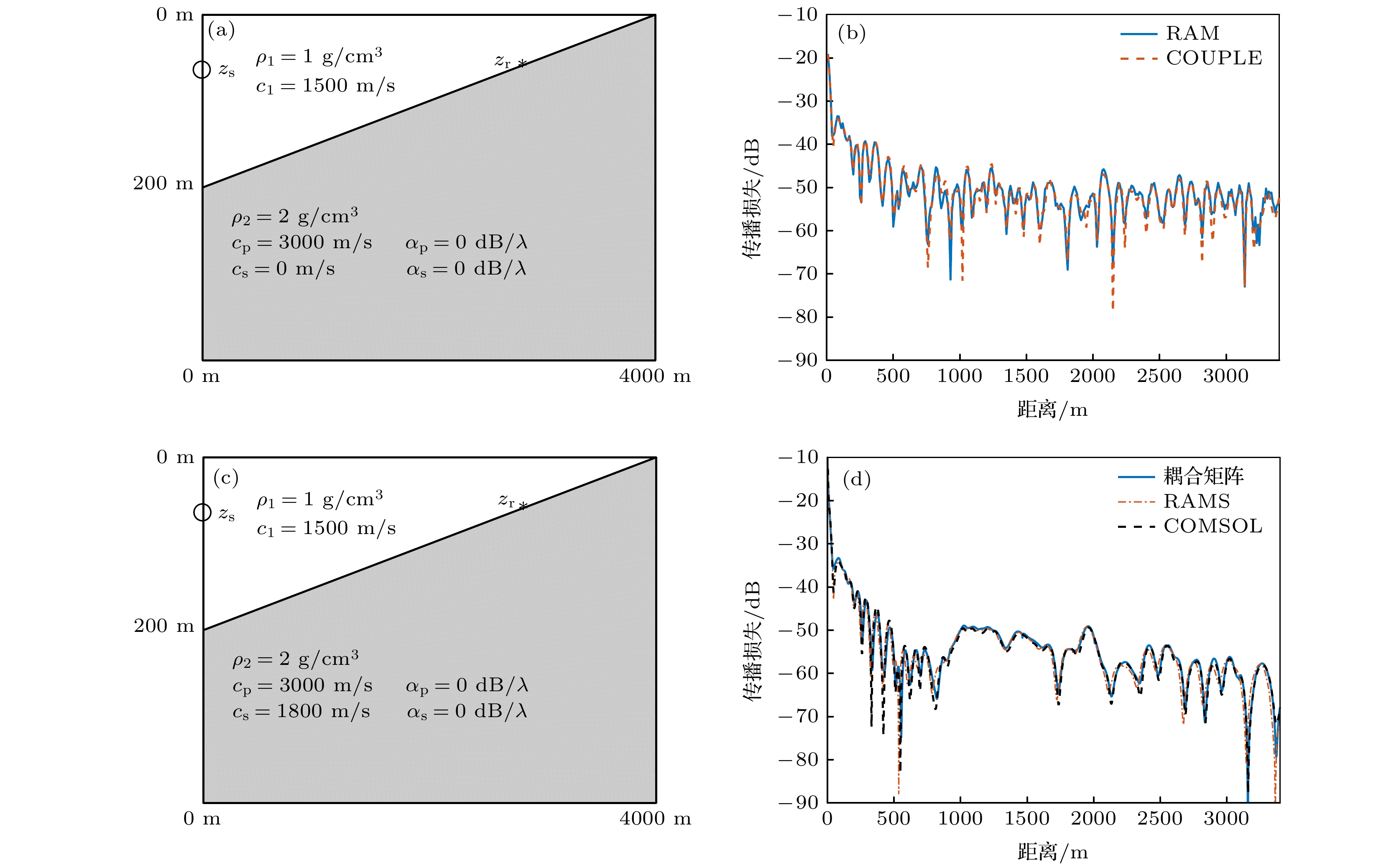 图 2 (a) 液态海底海洋环境模型; (b) 液态海底时的水中声压; (c) 弹性海底海洋环境模型; (d) 弹性海底时的水中声压
图 2 (a) 液态海底海洋环境模型; (b) 液态海底时的水中声压; (c) 弹性海底海洋环境模型; (d) 弹性海底时的水中声压Figure2. (a) Marine environment model with liquid seabed; (b) sound pressure in water with liquid seabed; (c) marine environment model with elastic seabed; (d) sound pressure in water with elastic seabed.
从图2(b)可见, Couple07和RAM程序计算液态海底时的水中声压, 结果基本一致, 说明这两种方法所得液态海底时的水中声压正确. 从图2(d)可见, 本文方法和RAMS以及COMSOL, 计算弹性海底时的水中声压基本一致, 证明了本文方法计算弹性海底时的水中声压的正确性. 此外, 对比图2(b)和图2(d)可见, 弹性和液态海底时的水中声压有较大差异, 体现了弹性海底对水中声压的显著影响. 后续计算中, 如无特别说明, f均为50 Hz, zs和zr均为30 m, 声压计算距离均为3400 m, 海洋环境均如图2(c)所示.
3
3.1.2.弹性海底标准检验问题的计算结果
考虑如图2(c)所示的弹性标准楔形海底条件下的海洋环境. 分别采用本文方法、RAMS以及COMSOL, 计算水中声压, 所得结果如图3所示.由图3(a)可知, 未经幅度相位修正的

本文选择f = 50 Hz, 是因为此时海深H = 200 m处算出多达14阶简正波, 单阶简正波的局部计算误差对声场的影响较小; 而常规的标准楔形海底算例采用f = 25 Hz. 为进一步验证COMSOL计算结果的准确性, 计算25 Hz时的水中声压, 如图3(c)和图3(d)所示, 可看出该条件下, RAMS和COMSOL所得声压基本一致, 从而验证了COMSOL所得声压的准确性, 可以用COMSOL来检验本文方法声压计算结果的准确性. 从图3(c)可见, 不考虑简正波幅度的相位处理时, 本文方法和COMSOL所得声压在 x > 2.2 km时相差很大; 而从图3(d)可见, 考虑简正波幅度的相位处理后, 本文方法所得声压与COMSOL所得声压的接近程度在x > 2.2 km时大幅提升, 表明这样的处理能够得到更准确的声压. 此外, 从图3(b)和图3(d)可见, f = 25 Hz时, 本文方法所得声压在一些位置处和COMSOL计算结果相差较大, 而50 Hz时则与COMSOL计算结果基本一致. 原因是, 本征值接近割线位置ks时计算不准确, 导致局部声压计算错误. 这样的错误出现在越低阶次的简正波, 对声压计算的影响越大, 而在本文的计算中, 25 Hz时, 第2阶简正波本征值在 x = 3271—3350 m处靠近ks而计算出错, 而50 Hz时, 从第3阶简正波才开始出现 x < 3400 m时的本征值计算错误, 造成的声压计算误差小得多. 而当cs从1800 m/s增加到2000 m/s时, 图3(f)中的本文声压计算结果和COMSOL更符合, 其原因在于, 此时ks变小, 低阶简正波本征值靠近ks割线计算出错的距离增大, 对前3400 m距离的声压计算带来的误差变小, 由此导致了更为准确的声压计算结果. 因此, 本文方法在声波频率更高以及海底横波声速更大的情况下, 水中声压计算结果更准确. 下文所有计算中, 均考虑简正波幅度相位修正后的简正波正交归一化所得声压.
除了对比本文方法和RAMS以及COMSOL的声压计算精度, 还对比了三者的计算速度, 结果如表1所列.
| 计算方法 | 耦合矩阵法 | RAMS | COMSOL |
| 平均耗时/s | 7.66 | 5.37 | 27.33 |
表1图2(c)环境下声场计算的平均耗时
Table1.Average time consumption for acoustic field computation under the environment shown in Fig. 2(c)
从表1可见, 耦合矩阵法计算声场耗时和RAMS较为接近, 均比COMSOL耗时短得多.
2
3.2.泄漏模态对弹性耦合简正波的影响分析
33.2.1.泄漏模态对声压传播损失的影响分析
本文讨论的泄漏模态, 指的是本征值km实部小于ks的模态. 考虑和不考虑泄漏模态时本文方法所得声压, 及其和RAMS, COMSOL的结果对比, 如图4所示.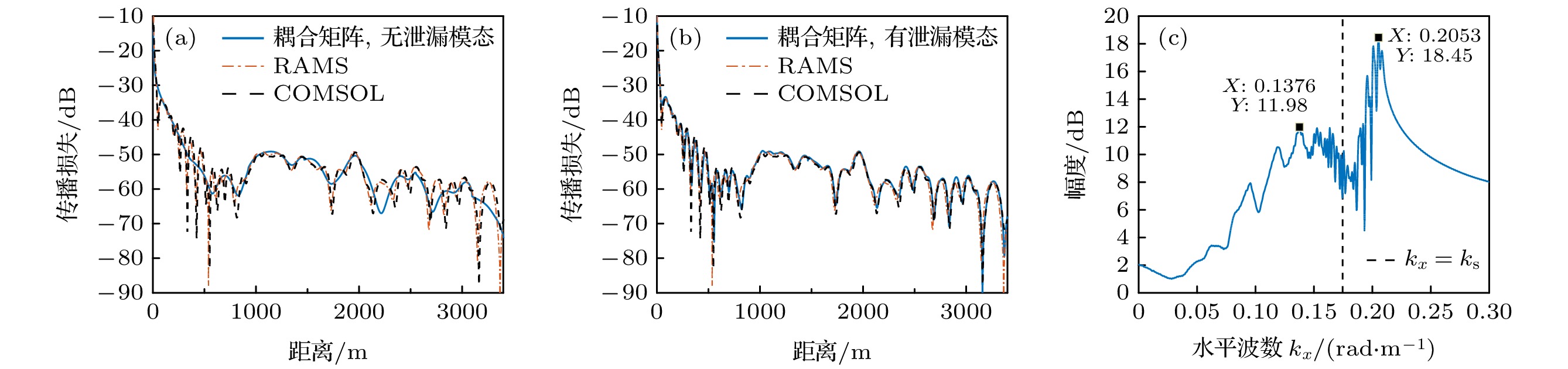 图 4 (a)不考虑和(b)考虑泄漏模态时的耦合矩阵法所得声压, 及其和RAMS, COMSOL程序所得声压的对比; (c) RAMS所得声压的FK变换结果
图 4 (a)不考虑和(b)考虑泄漏模态时的耦合矩阵法所得声压, 及其和RAMS, COMSOL程序所得声压的对比; (c) RAMS所得声压的FK变换结果Figure4. Sound pressure obtained by the coupling matrix method when the leaky mode is (a) not considered or (b) considered, compared with the sound pressure obtained by the RAMS and COMSOL program; (c) the FK transformation result of the sound pressure obtained by RAMS.
从图4(a)可见, 不考虑泄漏模态时, 本文方法所得水中声压和RAMS, COMSOL结果相差较大. 而从图4(b)可见, 考虑泄漏模态时, 本文方法所得声压和RAMS, COMSOL结果较为接近. 这说明, 在计算标准楔形弹性海底时的水中声压时, 必须考虑泄漏模态. 这个结论, 也可以通过波数域声压来佐证.
对RAMS所得声压p(x, zr) (Δx = 1 m)进行频率-波数域滤波(frequency-wavenumber filtering, FK)变换, 得到波数域声场
3
3.2.2.声源深度对声场的影响分析
改变声源深度, 得到的声压见图5. 从图5可见, 考虑泄漏模态, 在zs = 50, 70和100 m时, 本文方法和COMSOL所得声压基本一致. 说明在改变zs时, 本文算法所得声压能够和COMSOL相符合. 而不考虑泄漏模态时, 3种不同zs时, 本文方法与COMSOL所得声压均有较大差异, 说明在这些zs条件下, 泄漏模态能量较高, 对声压的贡献不可忽略.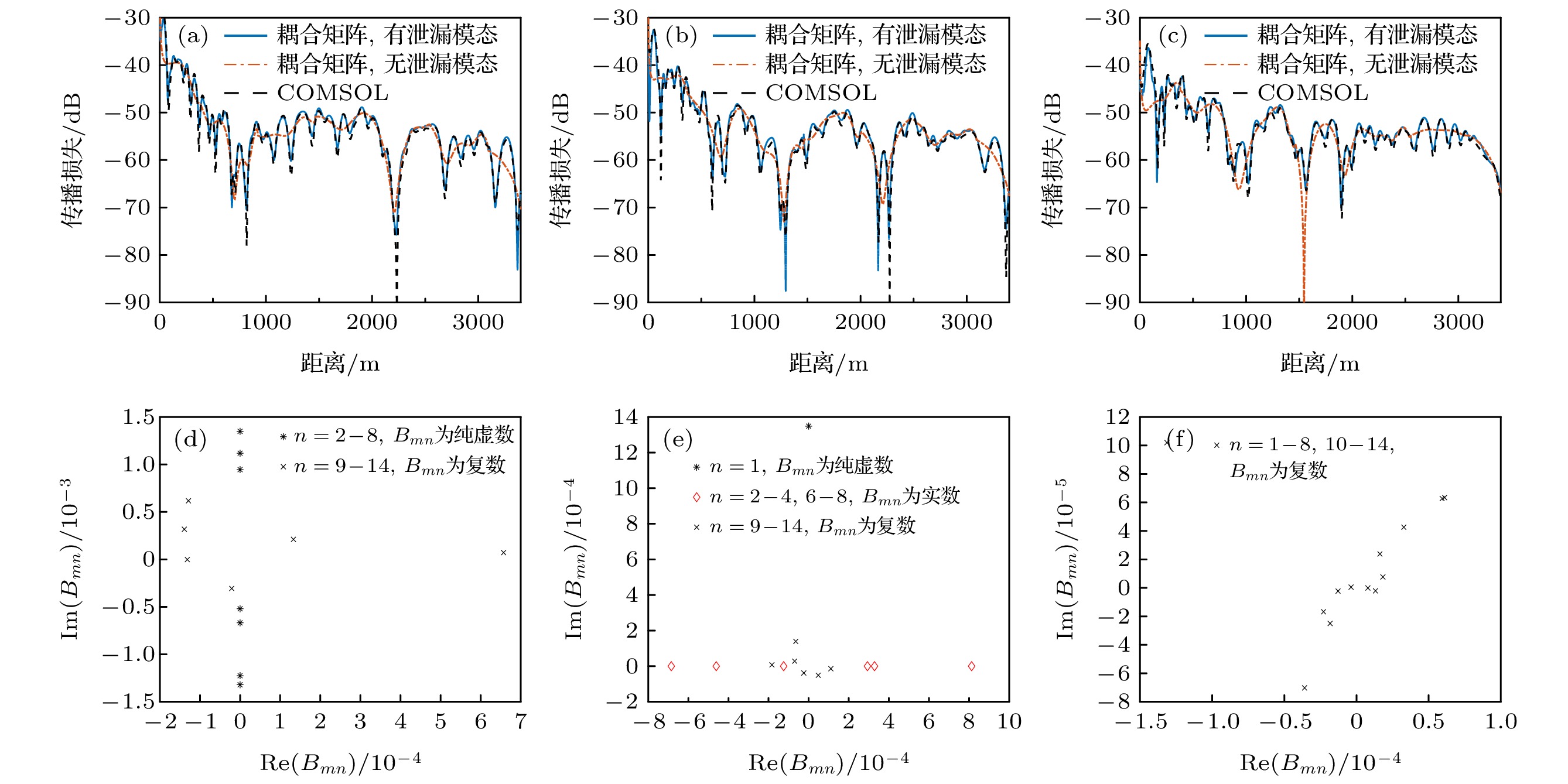 图 5 zr = 30 m, zs = (a) 50, (b) 70和(c) 100 m时的水中声压; m = (d) 1, (e) 5和(f) 9 时, x = 0 m处的耦合系数Bmn
图 5 zr = 30 m, zs = (a) 50, (b) 70和(c) 100 m时的水中声压; m = (d) 1, (e) 5和(f) 9 时, x = 0 m处的耦合系数BmnFigure5. Sound pressure in water when zr = 30 m, zs = (a) 50, (b) 70, and (c) 100 m; the coupling coefficient Bmn at x = 0 m when m = (d) 1, (e) 5和(f) 9.
此外, 观察到, 不考虑泄漏模态时, 声压起伏较小, 声场干涉不太明显. 而当考虑泄漏模态时, 声场干涉起伏明显增强. 为了解释这个现象, 以x = 0 m处的耦合系数Bmn为例来说明:
耦合系数(C1)式中



为了分析局地简正波带来的耦合系数Bmn的附加相位, 去掉简正波水平波数差带来的相位因子

为了验证上述分析的正确性, 将不含波数差的耦合系数Bmn取实部, 绘制声压传播损失, 且和Bmn保持为复数时的声传播损失进行对比, 如图6所示.
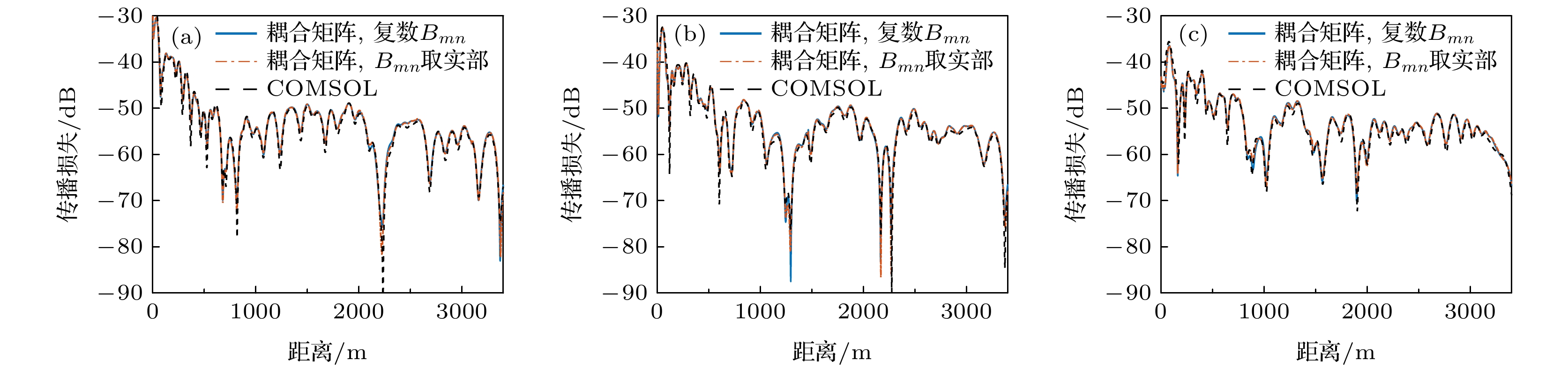 图 6 (a) zs = 50, (b) 70和(c) 100 m时, 不含波数差的耦合系数取实部和保持为复数时的声压对比
图 6 (a) zs = 50, (b) 70和(c) 100 m时, 不含波数差的耦合系数取实部和保持为复数时的声压对比Figure6. Acoustic pressure when the real part of the coupling coefficient without wavenumber difference is taken when zs = (a) 50, (b) 70, (c) 100 m, compared with the sound pressure when the coupling coefficient is kept as a complex number.
从图6可见, 3个不同zs情况下, 无论不含波数差的耦合系数Bmn取实部, 还是保持复数, 本文方法所得声压结果都基本一致, 仅在某些局部略有差别. 这说明, 复数耦合系数导致的相干耦合以及附加相移, 对声传播损失的影响较小, 并不是考虑泄漏模态后声场干涉结构变得复杂的主要原因.
为了分析泄漏模态导致声场干涉结构变得复杂的原因, 绘制各阶简正波本征值实部随着距离的变化, 如图7(c)所示. 从图7(c)可见, 第9—14阶简正波在x = 0 m处就是泄漏模态, 它们只对近场声压有贡献, 而对远场声压的贡献可以忽略. 而第2—8阶简正波在x = 0 m处是传播模态, 传播过程中变为泄漏模态, 它们变为泄漏模态的距离较远, 从该位置处才开始指数衰减, 指数衰减距离并不长, 因而它们对声压的贡献不可忽略, 与传播模态的干涉作用不可忽略, 带来了比只考虑受限模态时更复杂的声场干涉.
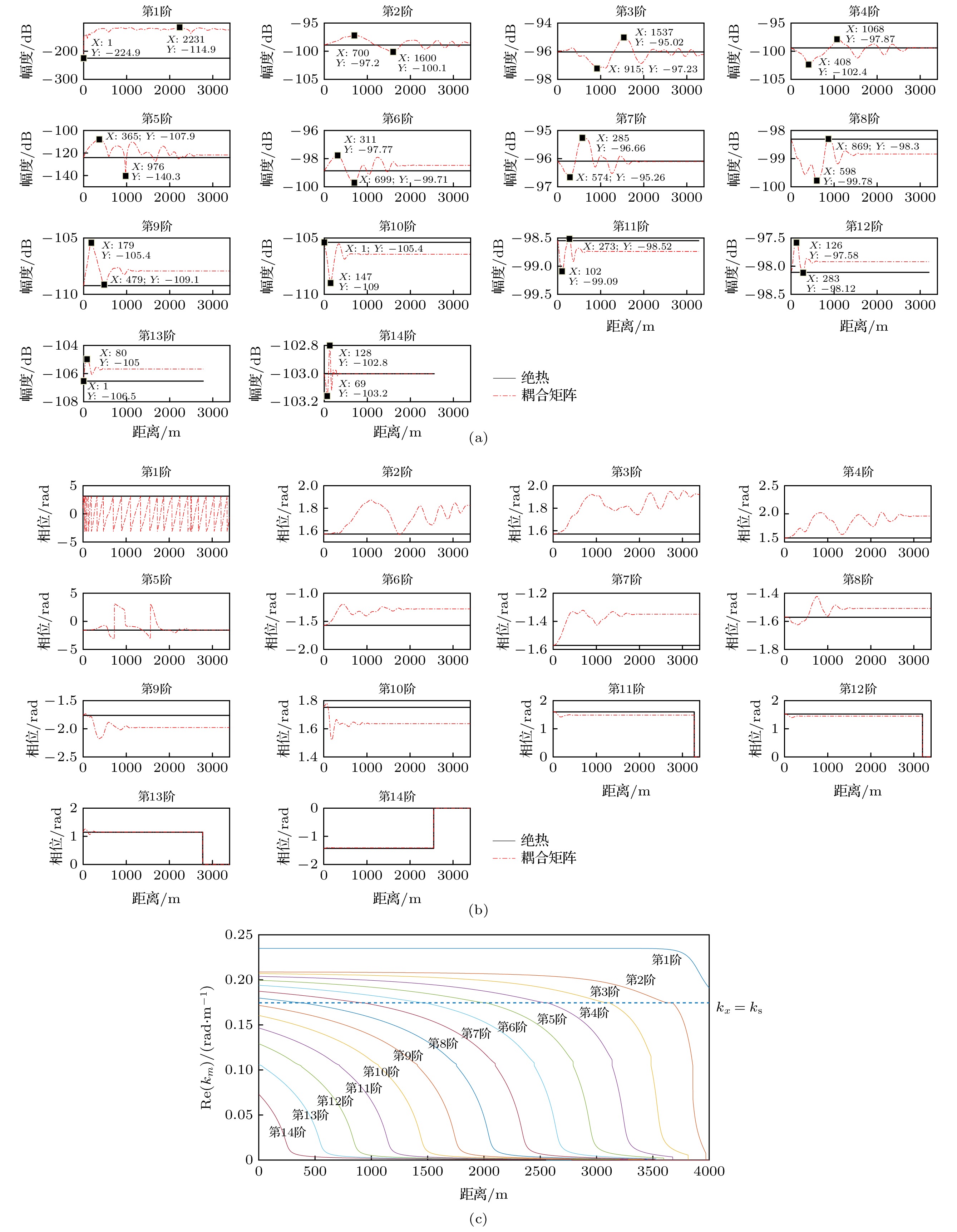 图 7 zs = 50 m, 各阶简正波的(a) |am|和(b) am的相位随距离的变化; (c) f = 50 Hz, 海洋环境如图2(c)时, 各阶简正波本征值的实部随距离的变化
图 7 zs = 50 m, 各阶简正波的(a) |am|和(b) am的相位随距离的变化; (c) f = 50 Hz, 海洋环境如图2(c)时, 各阶简正波本征值的实部随距离的变化Figure7. When zs = 50 m, (a) |am| and (b) the phases of am of each order of normal mode varying with distance. (c) When f = 50 Hz and the marine environment is shown in Fig. 2(c), the real part of the normal mode eigenvalues of each order varying with distance.
3
3.2.3.耦合对简正波声压幅度am的幅度和相位的影响
根据(18)式, 简正波耦合只影响各阶简正波的幅度am, 而am是1个复数, 因而分别分析耦合对复数am的幅度和相位的影响. 绝热近似和考虑耦合时, 各阶简正波am的模|am|以及相位随距离的变化如图7(a)和图7(b)所示.一般情况下, 声源远离海底时, 界面波(图中标注为第一阶, 下同)的激发强度很弱, 几乎无法被探测到. 而从图7(a)可见, zs = 50 m时, 简正波耦合对界面波的幅度影响最为明显, 将界面波的声压幅度|a1|提高了110 dB, 使得其幅度达到和第5阶简正波近似的水平, 使界面波有可能被探测到. 而第5阶简正波的幅度|a5|受耦合的影响, 仅次于界面波, 最大起伏达到32.4 dB. 其原因在于, 在声源位置处, zs = 50 m位于第5阶简正波的波节处附近, 因而第5阶简正波激发强度较小, 容易受到其他阶简正波的耦合影响而带来幅度的剧烈变化. 而其他阶简正波的幅度起伏相对较小, 均不超过5 dB, 由此可见, 耦合虽然改变了各阶简正波的幅度的模|am|, 但是大部分简正波幅度变化并不大. 而从图7(b)可见, 耦合改变了所有阶简正波am的相位, 这种改变, 不仅对泄漏模态有影响, 对受限模态也不例外. 其中, 对界面波幅度a1的相位变化最明显, 呈现出相位的锯齿状类周期性变化, 说明界面波的相位受到以相邻阶简正波为主的各阶简正波的强烈耦合影响. 而第2—4阶简正波am的相位也呈现类周期性变化. 此外, 当简正波从受限模态逐步转变为泄漏模态后, 其幅度am的相位随距离的变化逐渐变小, 最终相位趋于稳定. 其原因在于, 转变为泄漏模态后, 由于衰减系数的存在, 耦合系数Bmn中的

为了进一步分析简正波耦合对各阶简正波的影响, 对各阶简正波的声压做FK变换, 得到图8.
 图 8 zs = (a) 50和(b) 100 m时, 各阶简正波声压的FK变换结果图
图 8 zs = (a) 50和(b) 100 m时, 各阶简正波声压的FK变换结果图Figure8. FK transformation results of normal mode sound pressure of each order when zs = (a) 50 and (b) 100 m.
从图8可见, zs = 50 m时, 相比绝热近似, 耦合显著改变了界面波和第5阶简正波声压的幅度和相位分布, 而对其他阶简正波影响不大. 而zs = 100 m时, 耦合显著改变了界面波和第3, 5, 7阶简正波声压的幅度和相位分布. 其原因在于, zs = 100 m时, 声源深度位于局地全海深的一半, 第3, 5, 7阶简正波的激发强度较小, 容易受到其他阶简正波的耦合影响而改变幅度.
3
3.2.4.海底坡度对声场的影响
保持声源处海深为200 m不变, 仅改变上坡海底的坡度, 得到坡度为0.0125, 0.025, 0.05, 0.075时的上坡海底时的声压, 如图9所示, 计算结束的距离分别为3400, 3400, 3400和2267 m.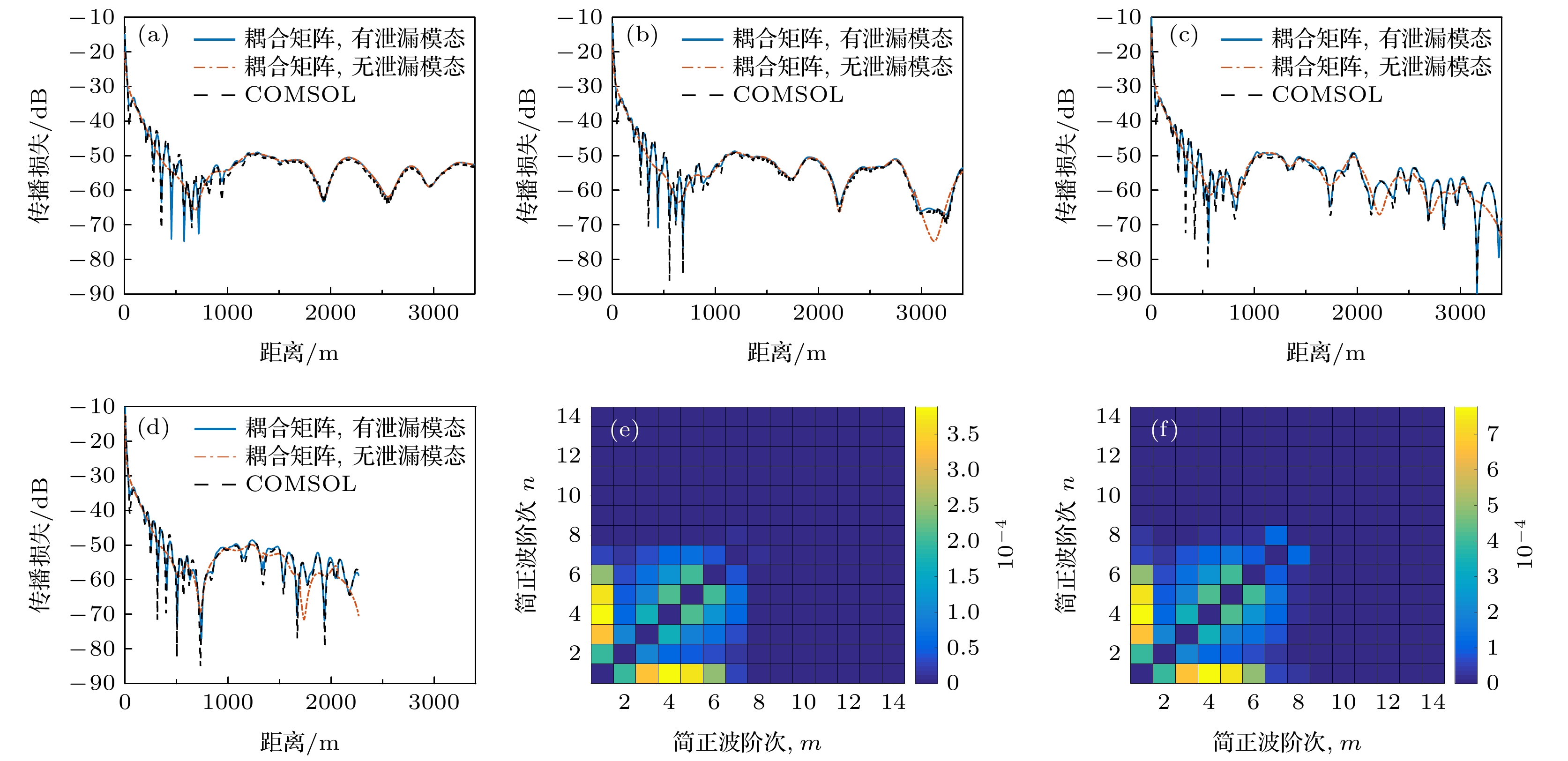 图 9 上坡弹性海底的坡度为(a) 0.0125, (b) 0.025, (c) 0.05和(d) 0.075时的水中声压; 考虑泄漏模态, 坡度为(e) 0.0125和(f) 0.025, x = 1 km时的|Bmn(x)|
图 9 上坡弹性海底的坡度为(a) 0.0125, (b) 0.025, (c) 0.05和(d) 0.075时的水中声压; 考虑泄漏模态, 坡度为(e) 0.0125和(f) 0.025, x = 1 km时的|Bmn(x)|Figure9. Sound pressure in water when the seabed slope is (a) 0.0125, (b) 0.025, (c) 0.05 and (d) 0.075 on the upslope elastic seabed. The |Bmn(x)| considering the leaky mode when x = 1 km when the slope is (e) 0.0125 and (f) 0.025.
从图9(a)—(d)可见, 考虑泄漏模态时, 各个海底坡度下, 本文方法和COMSOL所得声压基本一致; 而不考虑泄漏模态时, 海底坡度为0.0125时, 在R < 1.2 km时本文方法和COMSOL所得声压有较大差异, 而R ≥ 1.2 km时, 本文方法和COMSOL所得声压逐渐趋于一致, 说明在该坡度下, 泄漏模态对于近场有显著影响, 而在远场逐步减弱, 可以忽略.
而当坡度增加到0.025时, 不考虑泄漏模态时, 除了R < 1 km时本文方法和COMSOL所得声压相差较大以外, x = 2.9—3.3 km处, 本文方法和COMSOL所得声压相差也较大, 仅在x = 1—2.9 km段与COMSOL所得声压基本一致. 坡度进一步增加到0.05和0.075时, 不考虑泄漏模态条件下, 本文方法和COMSOL所得声压在各个距离处都相差较大. 其原因在于, 以坡度为0.05为例, 结合前文的分析, 第9—14阶简正波在x = 0 m处就是泄漏模态, 只对近场声压有贡献. 而第2—8阶简正波变为泄漏模态的距离较远, 远场处指数衰减距离并不长, 因而它们对远场声压的贡献不可忽略.
海底坡度对简正波耦合强度也有影响. 对比这4种不同海底坡度下的声压发现, 考虑泄漏模态时, R < 500 m时, 4种坡度时所得声场基本一致; 而当R > 500 m时, 随着海底坡度的增加, 声压随着距离的起伏变得越来越剧烈. 其原因在于, 随着海底坡度的增加, 简正波耦合强度增强, 简正波耦合带来的能量转移的速度加快, 从而带来更为复杂的声起伏, 导致声起伏的速度加快, 表现为随着海底坡度的增加, 声压随着距离的起伏变得越来越剧烈. 从图9(e)和图9(f)可见, 海底坡度从0.0125增至0.025, x = 1 km处的简正波耦合强度峰值增加了一倍, 证实了海底坡度对简正波耦合强度的影响.
3
3.2.5.海底地形对声场的影响
以往的标准楔形海底考虑上坡海底的声场, 从上坡海底改为坡度为0.05的下坡海底, 海洋环境如图10(a)所示, 画声压图时以声源位置为x = 0 m. 该条件下, 本文方法和RAMS以及COMSOL所得声场如图10(b)所示. 图 10 (a)下坡海底海洋环境; (b)下坡和(c)上坡的坡度为0.05时的弹性海底声场
图 10 (a)下坡海底海洋环境; (b)下坡和(c)上坡的坡度为0.05时的弹性海底声场Figure10. (a) Downslope seabed marine environment; sound field in water with (b) downslope and (c) upslope elastic seabed with a slope of 0.05.
从图10(b)可见, 下坡海底条件下, 考虑泄漏模态时, 本文方法和COMSOL所得声压基本一致; 而不考虑泄漏模态时, 本文方法和COMSOL所得声压相差较大. 从图10(c)也可以看到上坡海底时的相似结果, 显示了泄漏模态对水中声压不可忽略的贡献. 而比较图10(b)和图10(c)可见, 上坡海底时泄漏模态对声场的贡献更为显著, 其原因在于, 下坡海底情况下, 声源位置处海深只有50 m, 只激发起了4阶简正波, 而上坡海底时声源位置处海深200 m, 激发起14阶简正波. 虽然耦合对声场起到一定的影响, 但是下坡时的4阶简正波主导了声场, 而这4阶简正波中并不包含泄漏模态, 只是在距离增加的过程中, 能量通过简正波耦合进入泄漏模态. 而上坡海底时, 泄漏模态一开始就存在于14阶简正波中, 因而比下坡海底时对声场有更大的贡献.
此外, 对比图10(b)和图10(c)可见, 坡度绝对值都是0.05的情况下, 上坡情况下的声压传播损失随距离的变化起伏比下坡时更为剧烈. 原因是, 上坡海底时激发起的简正波阶数远少于下坡海底时, 因而上坡海底时简正波之间的干涉比下坡时复杂得多, 声压传播损失随距离的起伏更为剧烈. 同时也说明, 下坡海底时, 即便因为简正波耦合效应的存在, 而在海深随着距离变深的情况下激发起了更多阶局地简正波, 这些受激发而产生的新简正波的强度, 也比原始的4阶简正波弱得多, 因而无法对声场的干涉起到主要贡献.
另外图10(b)特别画出了下坡海底时的RAMS声压计算结果. 其目的在于展示出, 下坡海底情况下, RAMS的声压结果, 和COMSOL以及本文方法有较大差别, 说明此时RAMS的声压计算结果错误. 再结合表1可知, 本文提出的耦合矩阵法, 在3种方法中, 计算声压速度相对较快, 而且能在下坡海底情况下, RAMS计算声压出错时, 依然得到较为准确的水中声压, 表明了提出本文方法的必要性.
3
3.2.6.海底横波声速对声场的影响
改变
 图 11 cs = (a) 1800, (b) 1900, (c) 2000 m/s时的水中声压; (d) 考虑泄漏模态条件下, cs = 1800, 1900, 2000 m/s时采用耦合简正波法得到的声压对比
图 11 cs = (a) 1800, (b) 1900, (c) 2000 m/s时的水中声压; (d) 考虑泄漏模态条件下, cs = 1800, 1900, 2000 m/s时采用耦合简正波法得到的声压对比Figure11. Sound pressure in water when cs = (a) 1800, (b) 1900, (c) 2000 m/s; (d) sound pressure comparison obtained by mode coupling method while condidering leaky modes when cs = 1800, 1900, 2000 m/s.
而从图11(d)可见, 在最初的500 m距离, 3种横波声速情况下的水中声压基本一致, 而后续的声压呈现出相似的起伏特性. 然而, 对比可见, 对于这些相似的起伏, cs = 2000 m/s时声压随距离的起伏最快(峰值最先出现), 而cs = 1800 m/s时则是起伏最慢, 声压随距离的速度随着横波声速的变小而变慢. 此外, 声压传播损失随着海底横波声速的增加而减小. 其原因在于, 上文提到, 一部分高阶模态因为cs变大而从泄漏模态变为受限模态, 能量增强, 表现为声压传播损失减小; 而这部分变为受限模态的高阶简正波, 对声场干涉的影响增强, 而高阶模态之间的干涉的空间周期比低阶模态之间的干涉空间周期短, 呈现出声压随着距离的快速起伏.
当海底横波声速小于水中声速时, 考虑典型的弹性海底环境参数, 取cp = 1700 m/s, cs = 600, 100, 800 m/s, 其余环境参数如图2(c)所示, zs = zr = 30 m, 计算f = 50 Hz时的水中声场, 如图12所示. 此时, 由于cs较小, ks较大, 界面波之外都是泄漏模态, 只考虑所有模态而不再去掉泄漏模态, 只对比不同算法得到的声压, 以及不同cs对声压的影响.
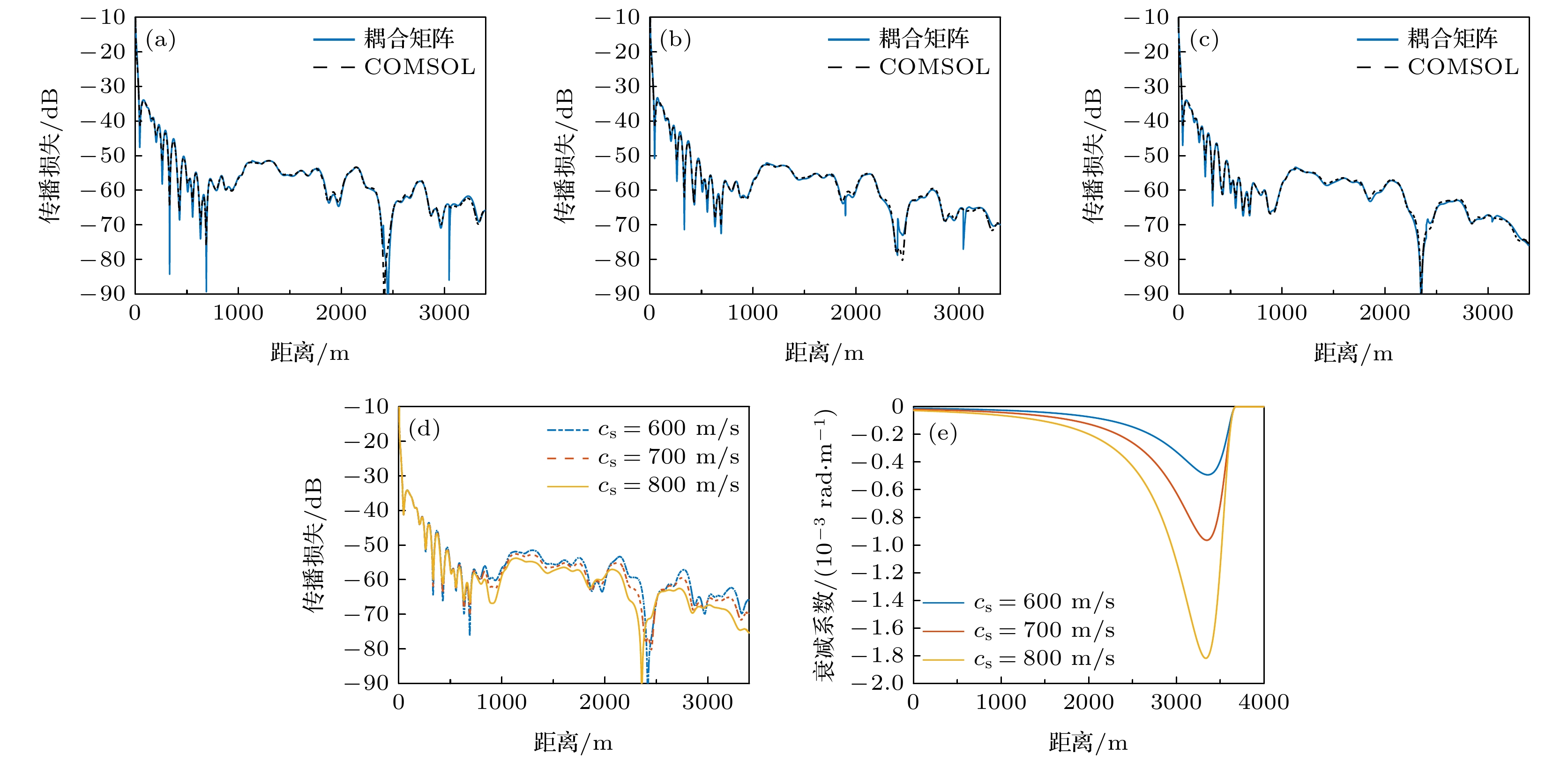 图 12 cp = 1700 m/s, cs = (a) 600, (b) 700 和(c) 800 m/s时的水中声压; (d) cs = 600, 700, 800 m/s时, 考虑泄漏模态情况下, 采用耦合简正波方法所得声压对比; (e) cs = 600, 700, 800 m/s时第2阶简正波衰减系数随距离的变化
图 12 cp = 1700 m/s, cs = (a) 600, (b) 700 和(c) 800 m/s时的水中声压; (d) cs = 600, 700, 800 m/s时, 考虑泄漏模态情况下, 采用耦合简正波方法所得声压对比; (e) cs = 600, 700, 800 m/s时第2阶简正波衰减系数随距离的变化Figure12. Sound pressure in water when cs = (a) 600, (b) 700, (c) 800 m/s; (d) sound pressure obtained by mode coupling method considering leaky modes and when cs = 600, 700, 800 m/s; (e) the attenuation coefficient of the 2nd normal mode varying with range when cs = 600, 700, 800 m/s.
从图12(a)—(c)可见, 当海底横波声速小于水中声速时, 耦合矩阵法所得声压与COMSOL计算结果基本一致, 在局部出现了一定的误差. 而从图12(d)可见, 随着cs的增大, 声起伏随距离的变化加快, 其原因是和cs大于水中声速时的原因一致. 有所不同的是, 声传播损失却随着cs的增大而变大, 与cs大于水中声速时的情况相反. 其原因在于, 在cs小于水中声速时, 随着cs的增大, 计算得到的各阶简正波本征值的衰减系数变大: 以第2阶简正波为例, 3种cs情况下, 第2阶简正波的衰减系数如图12(e)所示, 图中可见, 随着cs的增大, 第2阶简正波的衰减系数变大, 其余各阶简正波也存在此规律, 此处不再画图显示.
此外, 我们注意到, 图12(a)中, 大约在r = 3050 m处, 模型结果出现奇异值, 其原因在于, cp = 1700 m/s, f = 50 Hz时, 海底纵波波数kp ≈ 0.1847996 rad/m, 而本文模型计算得到的第3阶简正波局地本征值在该点的值k3 (r = 3050 m) ≈ (0.1847996—0.013628 i) rad/m, 它的实部十分接近kp, 这样的情况下, 模型的本征值计算结果出现了微小的误差, 但是这个微小的误差, 导致特征方程在本征值靠近kp时产生巨大误差, 从而导致了声场计算结果奇异值的产生. 图12(b)中存在类似的问题, 声场奇异值处对应的也是第3阶简正波本征值实部接近kp的情况, 目前该问题尚未得到解决.
此外, Pekeris割线附近的本征值求解问题, 本文的解仍存在一定的误差. 本文算法所得声压传播损失和COMSOL方法相比仍有一定的误差, 需要解决. 这些问题, 将会在今后的研究中进行解决.
感谢COMSOL公司对本文中的声场计算提供的技术支持.


2)能量守恒条件的推导
对于能量守恒条件[21]


其中下角标1和2分别表示水中和海底的参量; u和w表示水平和垂直位移;


