1.School of Medical Instrument and Food Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China 2.Shanghai Key Laboratory of Molecular Imaging, Shanghai University of Medicine and Health Sciences, Shanghai 201318, China 3.School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 215300, China 4.Institute of Physics Chinese Academy of Sciences, Beijing 100190, China 5.School of Civil Engineering, Tsinghua University, Beijing 100084, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 11902190, 91634202, 12072200, 12002213), the Natural Science Foundation of Shanghai, China (Grant No. 20ZR1438800), the Construction Project of Shanghai Key Laboratory of Molecular Imaging, China (Grant No. 18DZ2260400), and the Fund from the Shanghai Municipal Education Commission, China (Class II Plateau Disciplinary Construction Program of Medical Technology of SUMHS, 2018–2020)
Received Date:02 December 2020
Accepted Date:08 March 2021
Available Online:26 May 2021
Published Online:05 June 2021
Abstract:The study of structural defects in particle systems is of great value for studying solid-liquid melting. The volume fraction is a key parameter that can be used to accurately quantify the phase-transition process. The collective behavior and interaction form in a wet particle system are much more complex than that of a dry particle material because of the existence of liquid bridge force between the wet particles. In this paper, the structural defects and the critical value of solid-liquid transformation in the monolayer wet particles during solid-liquid melting under vertical vibration are experimentally studied. The contact model of the wet particle system is constructed according to experimental and theoretical analysis, and the structural changes of the particles in the melting process of the quasi-two-dimensional wet particle system are quantified. The Voronoi tessellation is established to study the phase transition of the particle system, and the local volume fraction is adopted to determine the state of structural defect change during melting. The experimental results indicate that the phase-transition process is caused by structural defects in the solid. The defects appear from the edge of the particle system, and the chain defect pairs spread to the center. The reason for structural defects at the edge of the cluster is that the particles at the edge of the cluster are subjected to less liquid bridge force, and the kinetic energy brought by the collision between the particles and the bottom wall makes the particles become active and begin to explore the available space. The chain defects are caused by the force chain generated by the fluid bridge force, which makes the particles tend to move together in rows. In addition, the local volume fraction of seven-phase defective particles decreases significantly and is much smaller than that of five-phase defective particles and six-phase defective particles when defects occur. Therefore, the evolution and the critical state of the structural defects can be quantified by measuring the change in the minimum local volume fraction (the local volume fraction of particles with 7-fold defects) in the particle system. The local volume fraction of the analysis shows that when the minimum local volume fraction ? ≤ 0.6652 defects occur, and when ? ≤ 0.4872 particle system transforms from solid to liquid. Keywords:solid-liquid melting/ defect/ wet particles/ local volume fraction
通过BOO参数识别可以得到每个粒子的局部结构排列的相位图, 如图4所示. 为了便于研究系统中颗粒结构的演变, 不同的结构标识为不同的颜色, 其中$ {Q}_{0} $表示该颗粒为自由颗粒, 用蓝色表征, 如图4(a)所示; $ {Q}_{2} $表示该颗粒与两个颗粒相接触, 用绿色表征, 如图4(b)所示; $ {Q}_{4} $表示该颗粒与4个颗粒相接触, 用黄色表征, 如图4(c)所示. $ {Q}_{6} $表示该颗粒与6个颗粒相接触, 结构呈六角相, 用红色表征. 其中六角相在“相”位的变化中比较明显. 与其他局部结构的测量方法(如配位数或局部面积分数)相比, 使用BOO参数识别的优点是最小化周围颗粒对颗粒簇边缘的影响, 这对于分析小簇的结构至关重要. 图 4 接触模型的结构形式图, 蓝色表示自由颗粒, 在颗粒系统中没有接触颗粒; 红色表示具有六个接触颗粒的六角相颗粒. Figure4. Diagram of the structure of the contact model. The blue color represents free particles, and there are no particles in contact with the particle system. Hexagonal phase particles with six contact particles in red.
在不同加速度下, 通过BOO参数识别所得到的单层湿颗粒在团聚后颗粒系统的结构变化情况, 见图5. 使用不同结构颗粒的数量占全局颗粒的数量的百分比$ \xi $来衡量颗粒系统结构的变化, 红色和蓝色曲线分别表示六角相(hexagonal phase)和自由颗粒所占全局颗粒百分比随无量纲加速度$ \varGamma $的变化. 本文误差棒是以多次实验所测量的局部体积分数$ \xi $的标准差为中心, 线段长度的一半表示不确定度. 在较低的加速度下, 颗粒系统始终保持初始聚集状态, 颗粒的结构表现为长程的六角固相. 在$ \varGamma =7 $时, 颗粒簇会在圆盘内无规律移动, 单个颗粒由于受到容器底壁垂直振动带来的能量的影响, 颗粒在垂直面上有一个小的位移, 但是液桥力的作用使得相邻颗粒之间并不会发生相对移动. 随着振动强度的增加, 颗粒获得的能量也增加, 大的颗粒簇逐渐解体重组为小的团簇, 导致六角相迅速降低. 这与在晶体中观察到的晶体缺陷相似[25]. 由于颗粒所受到底壁的能量注入越来越大, 颗粒变得越来越活跃. 当两个颗粒的相对分离距离大于毛细桥的破裂距离时, 单个颗粒所获得的能量则足以解除液桥力的束缚融化为离散的粒子. 这种颗粒系统的集体行为在凝聚态物理学中被认为是一种从固态到液态的转变过程, 在转变的过程中颗粒系统会发生结构的变化[26,27]. 在平衡胶体颗粒体系[28]中所观察的融化行为与这种非平衡系统相类似, 这也表明了非平衡系统的融化转变与平衡系统之间必然存在某种联系. 图 5 不同加速度下单层湿颗粒在团聚后颗粒系统的结构变化图. 颗粒的结构是采用BOO参数识别并颜色表征后的结果, 曲线图表示了随着加速度的增加, 六角相和自由颗粒所占全局颗粒的百分比$ \xi $的变化. Figure5. The structure change diagram of single layer wet particle system after agglomeration under different accelerations. The particle structure is the result of BOO parameter identification and color characterization. The curve shows the change of the proportion of hexagonal phase and free particles in the system.
其中, $ {V}_{i} $表示第i个颗粒的体积, $ {V}_{i}^{\rm{voronoi}} $表示该颗粒在维诺图中多面体的体积. 实验中, 每个颗粒的局部体积分数可以直接根据平面图像中颗粒的像素和与所对应多边形的面积之比来定义. 当振动加速度$ \varGamma =15 $时, 每个颗粒在Voronoi cell中的分布见图6(a), 为了避免出现区域块边缘切割粒子所导致局部体积分数不准的问题, 在图像处理的过程中, 利用空间位置查找法排除区域边缘的颗粒. 红色七边形表示颗粒的结构为7-fold缺陷, 蓝色五边形表示颗粒的结构为5-fold缺陷. 可以发现7-fold颗粒和5-fold一起构成一个缺陷, 缺陷也可以相互结合形成一个5-7-5-7结构的缺陷对. 图 6 (a), (b), (c)分别为在$ \varGamma =14, 14.4, 15 $时颗粒在Voronoi cell中的结构形式; (d), (e), (f) 的柱状图分别展示了图6(a), (b), (c)加速度下颗粒的局部体积分数, 红色柱子表示结构为7-fold颗粒的局部体积分数, 蓝色柱子表示结构为5-fold颗粒的局部体积分数, 黑色柱子为发生缺陷前结构为六角相颗粒的局部体积分数 Figure6. (a), (b), (c), respectively in when Γ = 14, 14.4, 15 particles in the Voronoi cell structure of the form; the histograms of (d), (e), (f) respectively show the local volume fraction of particles under the acceleration of Figs. 6 (a), (b) and (c). The red column represents the local volume fraction of 7-fold particles, the blue column represents the local volume fraction of 5-fold particles, and the black column represents the local volume fraction of hexagonal phase particles before the occurrence of defects.
在不同的振动加速度下, 颗粒系统中最小的局部体积分数和平均局部体积分数的变化如图7所示. 当$\varGamma \leqslant 8$时, 由于振动强度较小, 颗粒系统几乎处于静止状态, 局部体积分数保持不变. 当$8 < $$ \varGamma<14$, 颗粒系统中处于团簇边缘的颗粒开始发生微弱的移动, 但由于受到液桥力的影响, 颗粒系统始终保持稳定状态, 此时颗粒的最小局部体积分数逐渐减小, 但平均局部体积分数几乎不变. 在$ \varGamma <14 $这个阶段颗粒系统的“相”图始终处于以长程定向顺序为特征的结晶相. 图 7 不同振动强度下颗粒系统中局部体积分数的变化曲线. 其中红色曲线表示系统中最小的局部体积分数变化, 蓝色表示系统中所有颗粒的平均局部体积分数变化. 图中Voronoi cell表示在该加速度下颗粒系统的“相”位图, 其中Voronoi cell右边缘处于颗粒系统中团簇的边缘位置 Figure7. The change curve of local volume fraction in particle system under different vibration intensity. The red curve represents the minimum local volume fraction change in the system, while the blue curve represents the average local volume fraction change of all particles in the system. Voronoi cell in the figure represents the phase diagram of the particle system under this acceleration, where the right edge of Voronoi cell is located at the edge of the cluster in the particle system.
逐渐增加Γ, 从Voronoi cell中可以看到, 在Voronoi cell右边缘位置(团簇边缘)颗粒的结构开始发生5-7 fold缺陷, 表明在$ \varGamma =14 $时颗粒系统开始发生结构缺陷. 此时颗粒系统的最小的局部体积分数$ \phi =0.6652 $, 并且颗粒系统的平均局部体积分数急剧下降. 这是因为团簇边缘的颗粒受到的液桥力较小, 颗粒由于与底壁的碰撞所带来的动能使颗粒变得活跃起来, 开始探索可用的空间. 这种现象与在旋转盘[2]中所得到的湿颗粒物质从表面开始发生融化的结果相一致. 在$ 14<\varGamma <36 $这个阶段, 颗粒的局部体积分数先显著降低, 然后达到稳定的状态, 衰减趋势呈指数型. 此阶段颗粒系统的缺陷从团簇边缘的位置逐渐向中间蔓延, 有趣的是缺陷更多呈现链状的5-7-5-7结构的链状缺陷对. 究其原因, 是由于液桥力而产生的力链所导致的, 使得颗粒更趋向于成排一起移动. 但是, 从Voronoi cell中并没有观察到缺陷解绑形成独立的缺陷, 整个系统还是处于比较稳定的“类晶体”结构. 当$ \varGamma =36 $时, 颗粒系统的缺陷急剧增加, 并出现7-fold或5-fold孤立的缺陷, 这说明颗粒系统开始发生从固体到液体转化. 在更高的加速度下, 整个颗粒系统结构杂乱无章, 系统逐渐被液化, 这也与图5中所分析的结果一致. 为了验证临界值是否具有迟滞效应, 分别对加速度递增和加速度递减情况下最小局部体积分数$ \phi $的增减变化趋势进行了研究, 如图8所示. 在加速度$ \varGamma $从 0至44 逐渐增加时, 最小局部体积分数的衰减趋势与图 7 相吻合; 但是在加速度$ \varGamma $从 44至0 逐渐减小时, 最小局部体积分数的增长曲线在图8 两虚线之间的这个区间具有很大的不确定性, 与加速度递增时最小局部体积分数的增减趋势并不相同, 所以此临界值不具有迟滞效应. 图 8 最小局部体积分数$ \varphi $的增减变化趋势, 红色曲线表示加速度$ \varGamma $从0依次增加到44时颗粒系统中最小局部体积分数的变化, 黑色曲线表示加速度$ \varGamma $从44依次减小到0时颗粒系统中最小局部体积分数的变化 Figure8. The trend of the increase and decrease of the minimum local volume fraction$ \varphi $. The red curve shows the change of the minimum local volume fraction in the particle system as the acceleration gradually increases from 0 to 44, and the black curve shows the change of the minimum local volume fraction in the particle system as the acceleration decreases from 44 to 0.



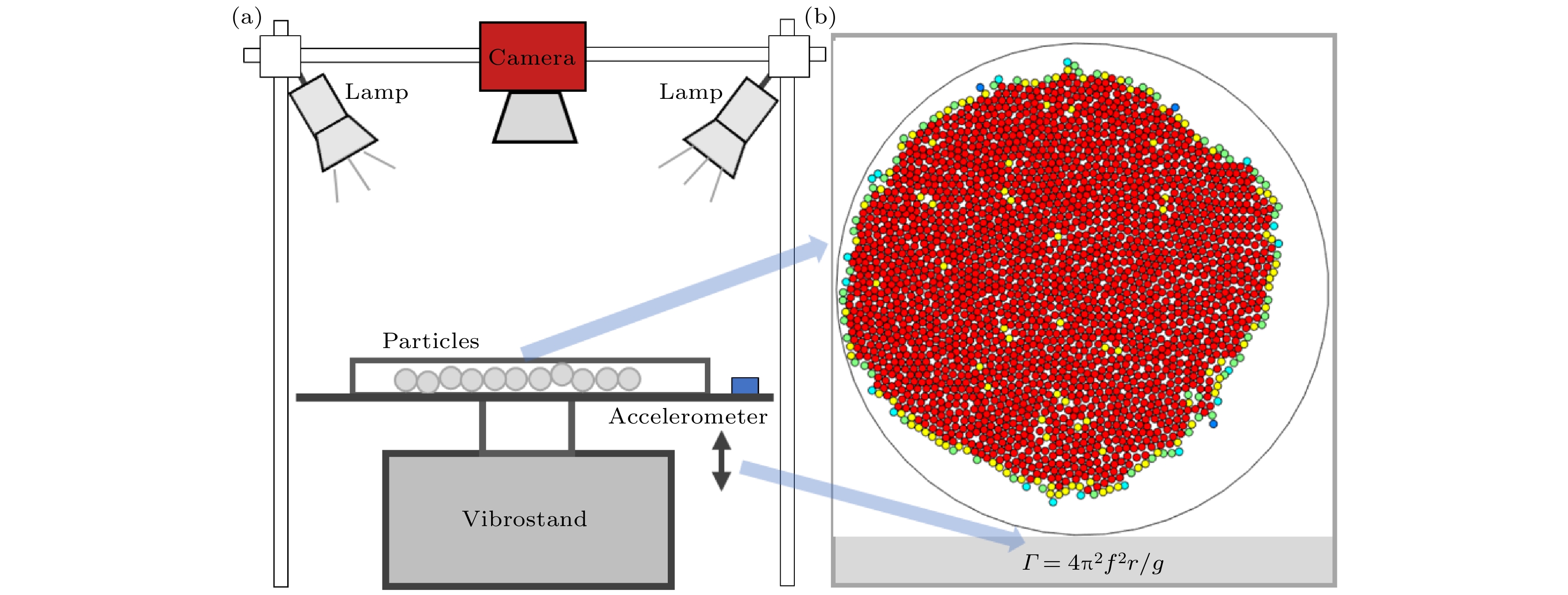 图 1 实验装置示意图
图 1 实验装置示意图







 图 2 (a)原始图像; (b)颗粒的定位
图 2 (a)原始图像; (b)颗粒的定位
 图 3 颗粒的局部结构识别示意图
图 3 颗粒的局部结构识别示意图















 图 4 接触模型的结构形式图, 蓝色表示自由颗粒, 在颗粒系统中没有接触颗粒; 红色表示具有六个接触颗粒的六角相颗粒.
图 4 接触模型的结构形式图, 蓝色表示自由颗粒, 在颗粒系统中没有接触颗粒; 红色表示具有六个接触颗粒的六角相颗粒.



 图 5 不同加速度下单层湿颗粒在团聚后颗粒系统的结构变化图. 颗粒的结构是采用BOO参数识别并颜色表征后的结果, 曲线图表示了随着加速度的增加, 六角相和自由颗粒所占全局颗粒的百分比
图 5 不同加速度下单层湿颗粒在团聚后颗粒系统的结构变化图. 颗粒的结构是采用BOO参数识别并颜色表征后的结果, 曲线图表示了随着加速度的增加, 六角相和自由颗粒所占全局颗粒的百分比






 图 6 (a), (b), (c)分别为在
图 6 (a), (b), (c)分别为在






 图 7 不同振动强度下颗粒系统中局部体积分数的变化曲线. 其中红色曲线表示系统中最小的局部体积分数变化, 蓝色表示系统中所有颗粒的平均局部体积分数变化. 图中Voronoi cell表示在该加速度下颗粒系统的“相”位图, 其中Voronoi cell右边缘处于颗粒系统中团簇的边缘位置
图 7 不同振动强度下颗粒系统中局部体积分数的变化曲线. 其中红色曲线表示系统中最小的局部体积分数变化, 蓝色表示系统中所有颗粒的平均局部体积分数变化. 图中Voronoi cell表示在该加速度下颗粒系统的“相”位图, 其中Voronoi cell右边缘处于颗粒系统中团簇的边缘位置






 图 8 最小局部体积分数
图 8 最小局部体积分数








