全文HTML
--> --> -->生物医学传感器的迅速发展对其能源供给问题提出了迫切的需求, 在早期的研究工作中, 生物医学传感器通常采用电池供能. 然而, 电池本身庞大的体积和较大的质量增加了传感器的负载[4], 很大程度上限制了微型化和便携化医疗设备的发展[5]. 随着生物医学传感器的发展, 其性能逐步提升, 对能源需求也越来越高, 因此研发不需要外部能源供给的生物医学传感器变得意义重大.
针对这一需求, 科学家们开始尝试着通过各种发电技术收集人体周围环境中各种形式的能源来为生物医学传感器提供能量, 这些发电技术包括太阳能电池[6,7]、电磁发电机[8]、生物燃料电池[9]和热电发电机[10]等. 2006年, 王中林院士等[11]首次提出了纳米发电机, 它可以将周围无规则的机械能转换为电能. 纳米发电机可以收集低频的机械能, 能量转换率高, 吸引了越来越多的科研工作者从事基于纳米发电机的自驱动设备的研究[11]. 根据工作原理的不同, 纳米发电机可分为压电纳米发电机、摩擦纳米发电机两种类型. 纳米发电机、电磁发电机及各种复合式发电机的成功研制[12], 使得自驱动生物医学传感器可以利用包括太阳能[13,14]、热能[10,15,16]、机械能[17]和生物能[18]等各种不同形式的能量, 极大地拓宽了自驱动生物医学传感器的供能方式[19].
除了能量来源以外, 生物医学传感器的另一个重要研究方向是材料的选择与改进. 生物医学传感器的应用场景离不开人体, 这对其材料的选择提出了很高的要求. 特别是需要在体内工作的植入式生物医学传感器, 在其材料的选择上显得更加严苛[20]. 一方面, 为了保证患者的健康, 生物医学传感器的材料需要具有很高的生物安全性. 另一方面, 由于生物医学传感器往往与人体的皮肤或组织直接接触, 为避免对人体造成损伤, 材料本身需要具有一定的柔性和拉伸性能.
本文首先讨论了各种柔性自驱动生物医学传感器的工作原理和材料. 接着, 本文对大量柔性自驱动生物医学传感器领域的工作进行了分类和筛选, 并从不同的研究方向中挑选了一些代表性的工作. 通过这些代表性的工作, 读者可以系统地了解具体研究方向的研究进展和挑战. 最后, 本文展望并总结了柔性自驱动生物医学传感器领域当前存在的问题、可能的解决方案和未来的发展方向.
现有的商用传感器常常需要外接电源才能工作, 额外的电路不仅增加了系统的复杂性, 同时也在一定程度上增加了器件的尺寸[28]. 主动式生物医学传感器无需外部电源便可以直接将人体的生理信号(如力学信号、热信号等)转变为电信号, 传输给检测装置, 从而大大降低了整个系统的复杂性(图1(a)). 常用的信号转换装置包括摩擦纳米发电机、压电纳米发电机和热电发电机等. 能量式生物医学传感器则是通过各种发电技术与现有的传感器技术相结合, 收集人体和环境中的能量, 为传感器提供电能(图1(b)). 此时, 摩擦纳米发电机、压电纳米发电机和热电发电机等不再扮演信号转换装置的角色, 而是作为能量收集装置为商用传感器提供电能.
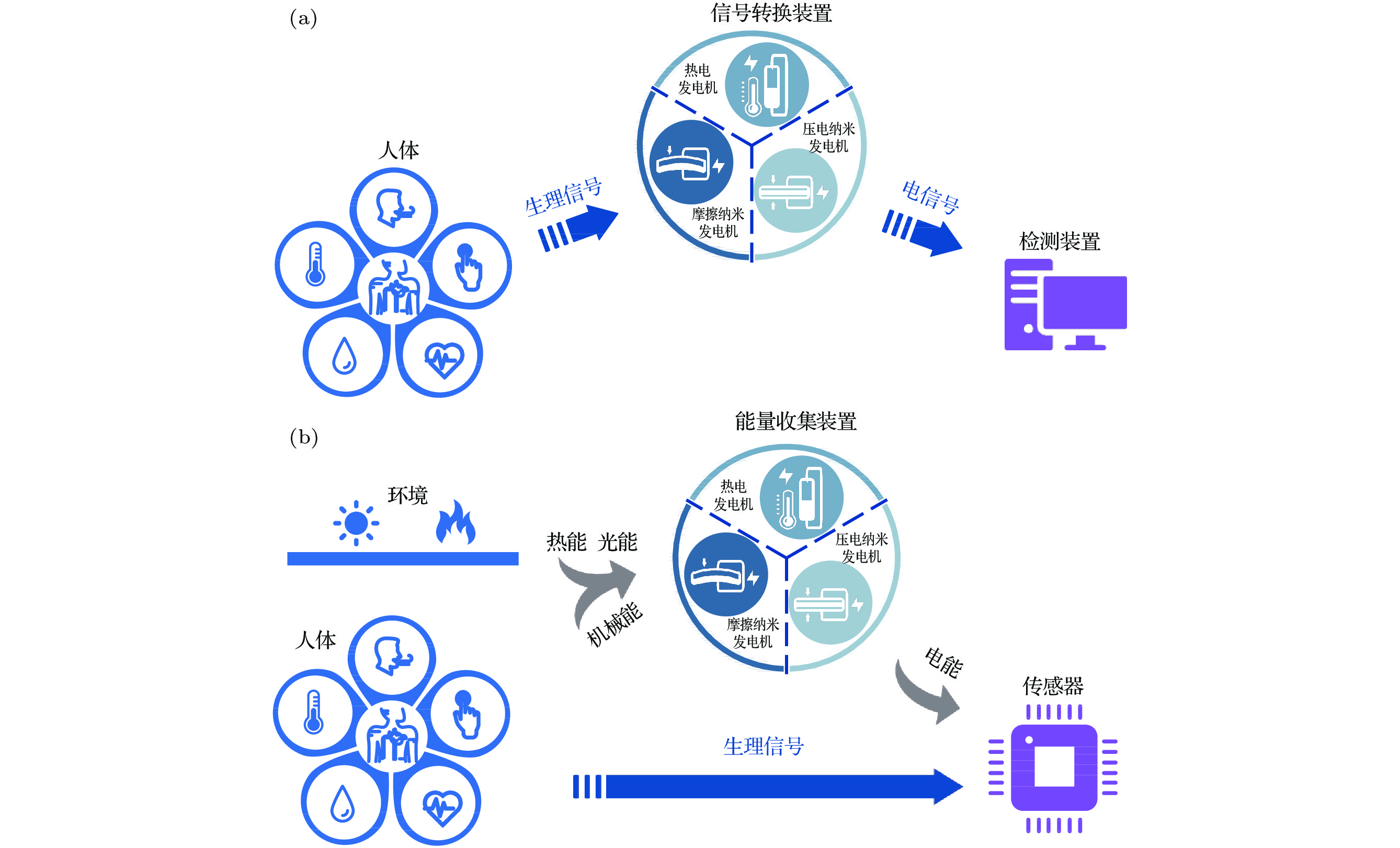 图 1 自驱动柔性生物医学传感器的设计思路 (a)主动式生物医学传感器直接收集各种生理信号并转化为电信号; (b)能源式生物医学传感器收集能量再为商用传感器提供能量
图 1 自驱动柔性生物医学传感器的设计思路 (a)主动式生物医学传感器直接收集各种生理信号并转化为电信号; (b)能源式生物医学传感器收集能量再为商用传感器提供能量Figure1. Design concept of self-powered flexible biomedical sensor: (a) Active biomedical sensors directly collect various physiological signals and convert them into electrical signals; (b) energy-type biomedical sensors collect energy and provide energy for commercial sensors.
一种自驱动柔性生物医学传感器一般需要使用多种材料, 根据其功能的不同, 可以将这些材料分为三类. 第一类是能量转换材料, 负责将其他形式的能量转化为电能. 不同的工作原理的自驱动柔性生物医学传感器需要使用不同的能量转换材料, 例如: 具有压电效应和热释电效应的聚偏二氟乙烯(PVDF), 具有热电效应的碲化物及其合金, 以及具有常用作摩擦层的聚四氟乙烯(PTFE)等[29]. 第二类是电极材料. 由于自驱动柔性生物医学传感器需要满足柔性和拉伸性的要求, 传统的金属电极已不再适用, 需要在原来的基础上补充一些特殊的加工或结构设计. 此外, 一些柔性电极如氧化铟锡(ITO)和水凝胶也为自驱动柔性生物医学传感器提供了更多电极上的选择. 第三类材料是结构材料, 其作用是隔离, 封装和保护自驱动柔性生物医学传感器的其他材料. 常用的结构材料有硅胶、聚二甲基硅氧烷(PDMS)[30]等.
由于自驱动柔性生物医学传感器特殊的应用场景和应用对象, 在其材料的选择的问题上要求很严格, 需要考虑到材料的多项性能. 自驱动柔性生物医学传感器的监测对象是人体, 往往需要与人的皮肤或器官组织直接接触, 硬质的刚性材料会带来异物感和刺痛感, 影响患者体验甚至危害患者的健康和安全[31]. 因此, 自驱动生物医学传感器材料需要保证一定的柔性. 如果器件的部分结构不可避免的要使用一些刚性材料, 则可以考虑使用柔性材料将刚性材料封装起来, 以避免刚性材料与人体的直接接触[32]. 自驱动柔性生物医学传感器的工作环境比较复杂, 往往伴随着各种各样的体液, 因此, 其选用的材料需要具备一定的化学稳定性. 同时, 由于自驱动柔性生物医学传感器需要对监测对象进行长期的监测, 工作时间较长, 对于涉及机械运动的自驱动柔性生物医学传感器来说, 其运动循环次数很多, 对材料的机械稳定性提出了较高的要求. 此外, 一些具有特殊应用的自驱动柔性生物医学传感器也需要一些额外的性能, 比如, 应用于电子皮肤的器件在材料选择时往往需要考虑材料的透明性, 而植入式自驱动柔性生物医学传感器的材料则有更高的生物安全性要求.
2
3.1.基于压电纳米发电机的自驱动柔性生物医学传感器的工作原理
压电效应很早就被科学家们所发现, 近年来更是被广泛应用在医疗电子设备领域[33]. 压电效应指压电材料在沿一定方向上受到外力而产生形变时, 内部出现极化并产生压电电势的现象. 最典型的压电材料是纤锌矿结构的ZnO, 其内部的Zn2+和O2–沿着c轴方向成正八面体结构层叠排列(图2(a)). 当没有外力作用时, 正电荷中心和负电荷中心位于同一位置, 当外力施加到四面体的任何一个轴向方向时, 晶体中的正负电荷中心发生位置的偏移, 从而形成偶极矩, 力的方向与轴向方向越接近, 偏移越明显(图2(b)). 偶极矩的产生使得晶体沿着轴向方向的两端产生电势差, 该电势即为压电电势(图2(c)). 此时, 再将压电材料两端接入负载或者处于短路状态, 就能产生电流(图2(d))[34]. 基于这一原理, 王中林院士提出了压电纳米发电机. 早期的压电纳米发电机往往选用一些脆性的无机压电材料, 如BaTiO3和Pb(ZrxTi1–x)O3等, 并不适用于自驱动生物医学传感器领域. 随着研究的深入, 新的有机压电材料如PVDF被相继开发出来, 压电材料开始向柔性、薄膜化发展, 也使得压电纳米发电机在自驱动柔性生物医学传感器这一领域的应用迅速发展起来.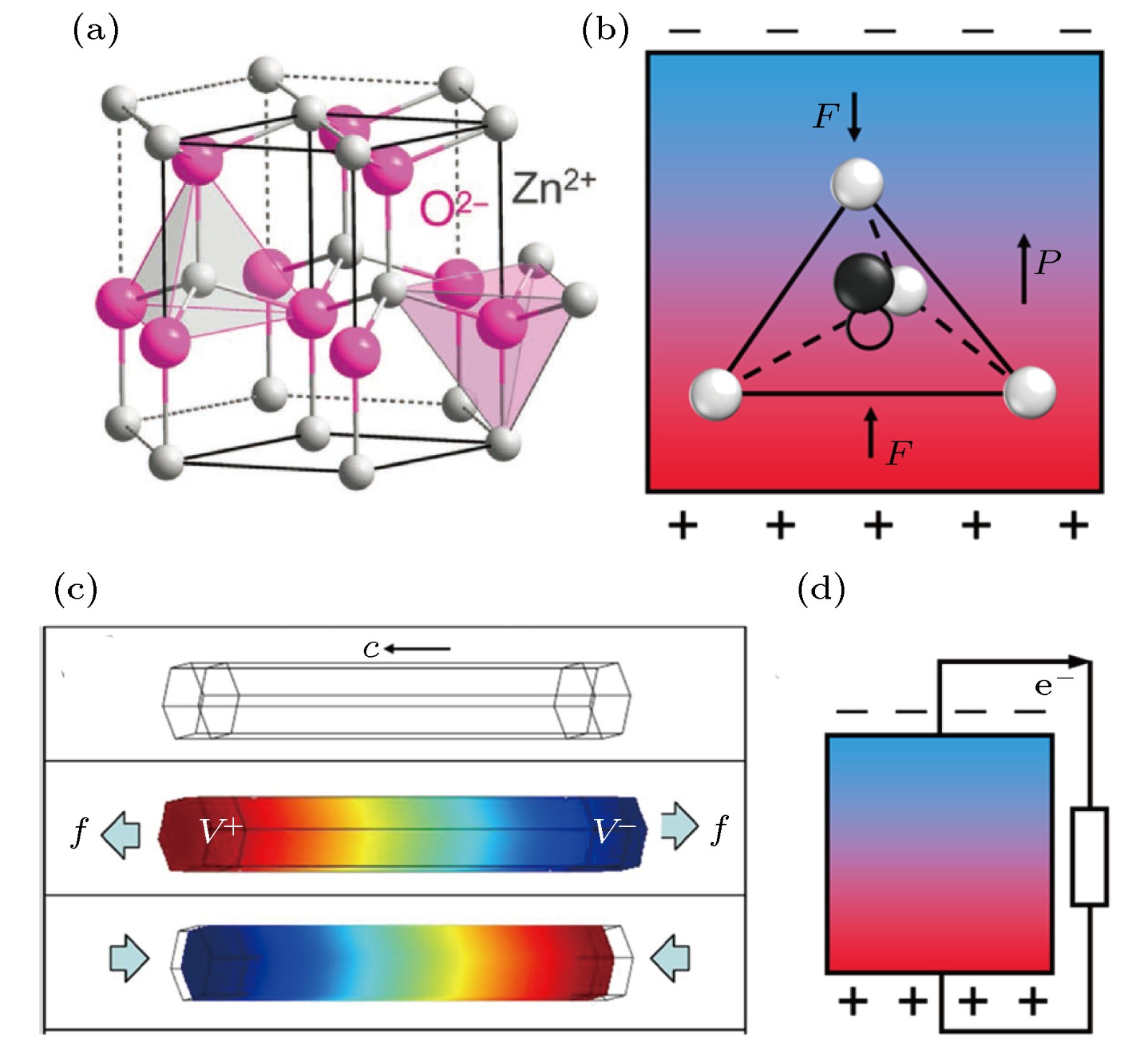 图 2 压电纳米发电机的工作原理[34] (a) ZnO的晶体结构模型; (b) ZnO纳米线的压电势; (c) ZnO纳米线压电势有限元分析; (d) 压电纳米发电机的发电机制
图 2 压电纳米发电机的工作原理[34] (a) ZnO的晶体结构模型; (b) ZnO纳米线的压电势; (c) ZnO纳米线压电势有限元分析; (d) 压电纳米发电机的发电机制Figure2. Working mechanism of piezoelectric nanogenerator[34]: (a) Crystal model of ZnO; (b) piezoelectric potential of ZnO nanowire; (c) finite element analysis of piezoelectric potential of ZnO nanowires; (d) mechanism of piezoelectric nanogenerator.
2010年, Li等[35]设计了一种可植入体内的纳米发电机, 可利用压电纳米发电机收集小鼠体内的机械能, 该装置的电学输出有限, 其峰值电压低于50 mV, 峰值电流低于500 pA. 但是, 这项工作首次证明了纳米发电机可以在体内为植入式医疗设备提供能量, 为自驱动植入式生物医疗传感器的研究奠定了基础.
2
3.2.基于摩擦纳米发电机的自驱动柔性生物医学传感器的工作原理
王中林院士于2016年提出的摩擦纳米发电机, 是机械能收集的又一开创性工作. 摩擦纳米发电机的发电原理基于摩擦起电效应和静电感应效应的耦合[36]. 两种不同材料相互摩擦后, 由于其对电子的吸附能力的差异, 一种材料会带上正电荷, 而另一种材料会带上负电荷, 同时, 两种材料的背侧电极上会产生感应电荷. 当两种材料分离时, 正负电荷发生分离, 这种正负电荷分离会相应的在材料的上下电极上产生电势差. 随着两种材料的距离发生变化, 电势也会发生周期性的变化. 同压电纳米发电机类似, 将两种材料的外侧通过外部电路或负载连接起来, 可以产生交变的感应电流.摩擦纳米发电机选材广泛, 原则上, 可由任何两种材料组装制备而成, 这使得其在各个领域都有广泛的应用前景[37]. 另一方面, 摩擦纳米发电机对低频条件的机械能也具有良好的收集能力. 由于人体的各种运动一般属于低频运动, 这使得摩擦纳米发电机能够很契合的应用在生物机械能的收集上[38]. 如图3所示, 摩擦纳米发电机具有4种基本模式, 分别是接触分离式、滑动式、单电极模式和独立层式. 4种摩擦纳米发电机具有各自不同的应用场景, 都在机械能收集上有广泛的应用.
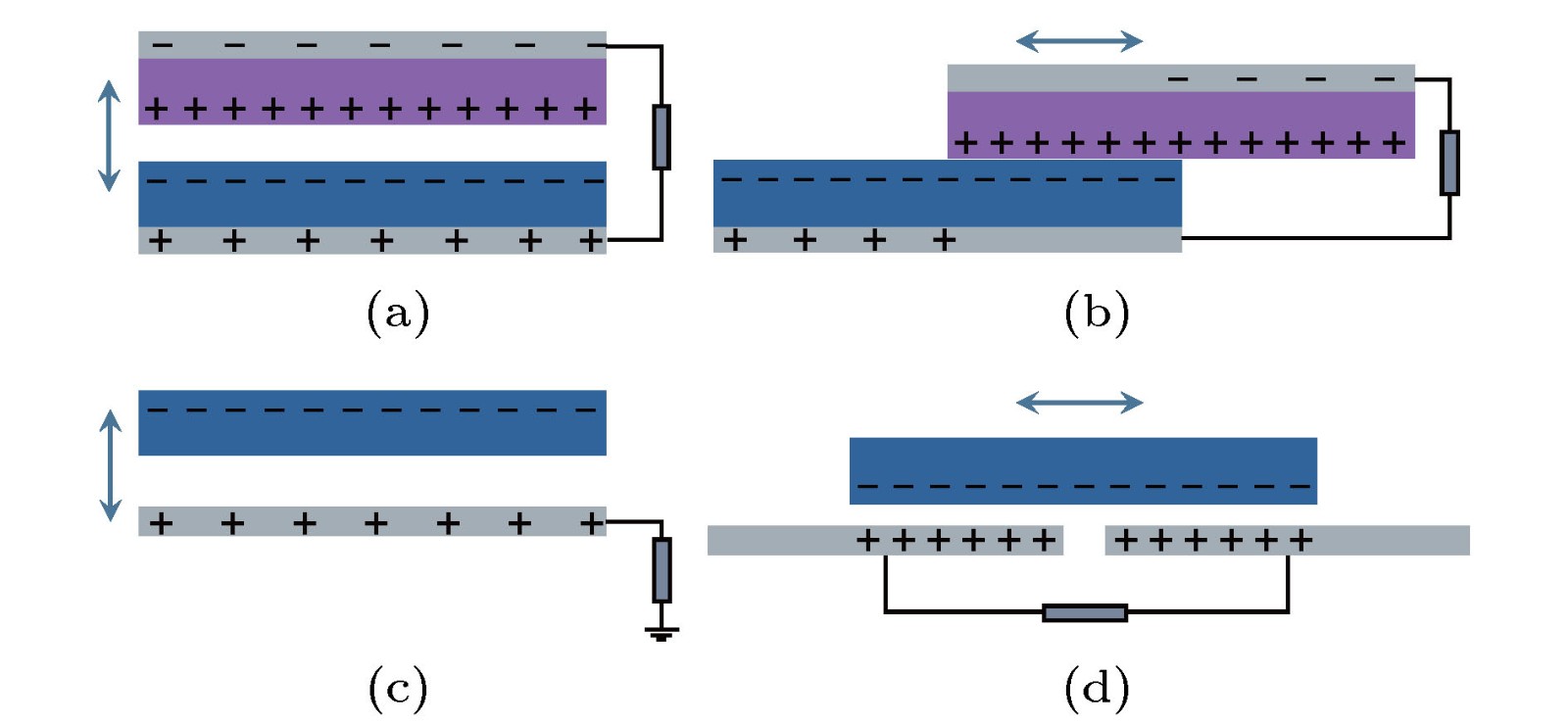 图 3 摩擦纳米发电机的4种工作模式[36] (a) 接触分离式摩擦纳米发电机; (b) 滑动式摩擦纳米发电机; (c) 单电极模式摩擦纳米发电机; (d) 独立层式摩擦纳米发电机
图 3 摩擦纳米发电机的4种工作模式[36] (a) 接触分离式摩擦纳米发电机; (b) 滑动式摩擦纳米发电机; (c) 单电极模式摩擦纳米发电机; (d) 独立层式摩擦纳米发电机Figure3. Four working modes of triboelectric nanogenerator[36]: (a) Vertical contact separation mode; (b) lateral sliding mode; (c) single-electrode mode; (d) freestanding triboelectric-layer mode.
2014年, Zheng等[39]设计了一种植入式摩擦纳米发电机, 将器件植入大鼠的胸皮下方或膈肌与肝脏之间, 通过收集大鼠呼吸产生的机械能, 为植入式心脏起搏器供电. 这一设计首次证明了摩擦纳米发电机在植入式医疗设备应用的可行性, 极大地拓宽了植入式自驱动生物医学传感器的研究思路.
2
3.3.基于热能收集的自驱动柔性生物医学传感器的工作原理
热能是自然界中另一种常见的能量形式, 人体作为一种热源, 可以充当基于热电效应装置的能量来源[40]. 热电发电的原理基于塞贝克效应, 即两种不同的导体或半导体在温度梯度下, 两种物质间产生电势差的现象. 如图4所示, 热电偶由两种具有不同塞贝克系数的金属A和B组成, 材料两端的温度差会导致两种材料在输出端之间形成电势差. 另外, 将单个金属导体置于温度梯度下, 内部载流子从热端移至冷端, 然后在冷端积聚, 也可以产生沿温度梯度方向的自旋电压[41]. 常见的无机热电材料通常刚性较大且易碎, 不能满足当前生物医学传感器对器件的柔性要求. 针对这一问题, 越来越多的具有优良性能的二维热电材料被研发出来[42]. 图 4 热电发电机的发电原理[41]
图 4 热电发电机的发电原理[41]Figure4. Working mechanism of thermoelectric generator based on spin Seebeck effect[41].
热释电发电机也可以收集热能产生电能, 但是这种发电机的发电原理与热电发电机截然不同. 热电发电机通过温度梯度来收集热能, 而热释电发电机通过温度的变化来收集热能, 这一现象往往出现在一些铁电材料中[43]. 铁电材料中的电偶极子的摆动幅度会随环境温度的变化而变化, 当环境温度升高时, 电偶极子的摆动幅度增大, 电极的感生电荷增加, 从而产生电子的流动. 无论是热电发电机还是热释电发电机, 其重要问题都是能源收集效率的问题, 特别是应用在自驱动生物医学传感器领域时, 皮肤热阻、材料热阻、热扩散等都是限制其能源收集效率的潜在因素[44,45].
4.1.自驱动柔性呼吸传感器
呼吸是人类的一个重要健康指标, 呼吸运动与人体的所有生命活动都有内在的联系, 可实时反映人的健康状况. 睡眠呼吸暂停低通气综合征是临床中常见的严重呼吸系统疾病, 患病者具有较高的健康风险. 目前, 睡眠监测是该疾病临床诊断的重要标准. 因此, 对于睡眠医学来说, 开发一种能够长时间连续监测自发性呼吸而又不影响睡眠质量的呼吸监测设备至关重要. 此外, 一些研究表明, 人体呼出的气体含有多种化学成分, 这些化学成分也可用于检测人体的健康状况, 甚至可以诊断某些特定疾病. 因此, 除了监测呼吸运动之外, 呼出空气的检测和分析也很重要.2017年, Liu等[28]提出了一种用于呼吸监测的穿戴式自驱动传感器, 该传感器先在硅基板上静电纺丝制备出PVDF薄膜, 再经过极化后制成. 通过与弹性绑带集成, 这种柔性压电纳米发电机可以将呼吸运动的机械能转换为电信号, 实时监控人的呼吸状况(图5(a))[27]. 2017年, Xue等[46]通过将PVDF薄膜与N95型口罩集成在一起, 制造出了一种可穿戴的热释电呼吸传感器. 人体呼气和吸气时会发生温度波动, 此时这种穿戴式热释电呼吸传感器可以通过PVDF薄膜的热释电效应产生的电信号反映出穿戴者的呼吸状态. 在50 MΩ的外部负载下, 该可穿戴热释电呼吸传感器的最大功率可以达到8.31 μW(图5(b)).
 图 5 自驱动柔性呼吸传感器 (a)基于柔性压电纳米发电机的穿戴式自驱动呼吸传感器[27]; (b)与N95口罩集成的热释电可穿戴呼吸传感器[46]; (c)基于摩擦纳米发电机的主动式酒精呼吸分析仪[47]
图 5 自驱动柔性呼吸传感器 (a)基于柔性压电纳米发电机的穿戴式自驱动呼吸传感器[27]; (b)与N95口罩集成的热释电可穿戴呼吸传感器[46]; (c)基于摩擦纳米发电机的主动式酒精呼吸分析仪[47]Figure5. Self-powered flexible respiratory sensor: (a) Wearable self-powered active sensor for respiration monitoring based on a flexible piezoelectric nanogenerator[27]; (b) wearable respiration sensor based on a pyroelectric nanogenerator integrated with an N95 respira-tor[46]; (c) blow-driven triboelectric nanogenerator as an active alcohol breath analyzer[47].
除了对呼吸直接的监测以外, 对呼出气体成分的监测也是非常有意义的. 2015年, Wen等[47]制造了一种基于摩擦纳米发电机的呼吸传感器, 将摩擦纳米发电机作为呼出气体酒精检测系统的电源(图5(c)). 该装置通过一个转盘式摩擦纳米发电机来收集呼出气体的机械能, 同时, 基于Co3O4的气体传感器的电阻会随环境酒精浓度变化而变化. 该基于摩擦纳米发电机的气体传感系统可以检测到10 ppm (1 ppm = 0.001‰)的低浓度酒精, 当喝酒的人向仪器呼气时, 其产生的电压会触发警报系统并发出警告信号.
2
4.2.自驱动柔性脉搏传感器
心脏是保证人体中各种其他器官、系统和整个身体正常运转的重要器官, 其主要功能是为血液流向身体各部分提供动力. 脉搏信号是监测心脏状态的重要标志[48]. 许多临床疾病, 尤其是心血管疾病, 会使患者的脉搏发生异常搏动. 脉搏监测可及时发现异常的心脏活动, 是预防突发性心血管疾病的第一道防线, 有助于相关心血管疾病的诊断和治疗. 脉搏的长期连续监测对于心血管疾病患者更为重要, 然而, 在当前临床中使用的心电图仪相对比较笨重, 不便于随身携带和使用. 为了实现长期连续的脉搏监测并确保监测结果的精度和准确性, 许多研究团队已经开发出具有高灵敏度和便携性的自驱动脉搏传感器, 这对促进移动医疗设备和远程医疗的发展具有重要意义.将设备植入到心包外直接对心脏搏动进行监测, 是最直接的脉搏监测方式. 2016年, Ma等[49]提出了一种基于柔性摩擦纳米发电机的主动式脉搏传感器, 该装置可以将心脏运动产生的力学信号直接转换为电信号(图6(a)), 用于脉搏信号的连续监测. 2017年Ouyang等[50]基于摩擦电效应开发了一种柔性的自驱动超灵敏脉搏传感器(图6(b)). 当该器件用于人体脉搏检测时, 其输出可以达到1.52 V, 响应时间为50 μs, 峰值信噪比高达45 dB. 其收集的脉搏信号与常规脉搏信号的二阶导数一致, 对某些特定心血管疾病(如心律不齐和心房纤颤等)的诊断具有指导性意义. 2018年, Park等[51]设计了一种自驱动超柔性生物传感器, 该传感器能够实时准确地监测心率(图6(c)). 这种传感器是通过在超薄聚对二甲苯基板(厚度为1 μm)上将有机光伏电池与有机电化学晶体管集成在一起而制成的. 其内置的有机光伏电池可以在室内光照条件下正常工作, 驱动其内置的传感器以大约1 V的低电压条件运行. 当该传感器连接到手指, 同时, 凝胶电极连接到人的胸部时, 其有机电化学晶体管可以获取清晰稳定的心率信号.
 图 6 自驱动柔性脉搏传感器 (a)用于实时生物医学监测的自驱动多功能植入式传感器[49]; (b)基于摩擦电效应的柔性自驱动超灵敏脉搏传感器[50]; (c)基于有机光伏电池的自驱动超柔性生物传感器[51]
图 6 自驱动柔性脉搏传感器 (a)用于实时生物医学监测的自驱动多功能植入式传感器[49]; (b)基于摩擦电效应的柔性自驱动超灵敏脉搏传感器[50]; (c)基于有机光伏电池的自驱动超柔性生物传感器[51]Figure6. Self-powered flexible pulse sensor: (a) Self-powered, one-stop, and multifunctional implantable triboelectric active sensor for real-time biomedical monitoring[49]; (b) flexible self-powered ultrasensitive pulse sensor based on triboelectric effect[50]; (c) self-powered ultra-flexible biosensor based on nanograting-patterned organic photovoltaics[51].
2
4.3.自驱动柔性体温传感器
体温则是另一项重要的生命体征. 健康人的体温相对恒定, 当人体偏离正常体温时, 人体的正常新陈代谢将受到影响, 并导致细胞、组织和器官的功能紊乱. 因此, 体温监测对人体健康评估具有重要意义. 发热是一些流行病的常见病理性表现, 对体温的监测是遏制这些流行病传播的重要手段. 近年来的一些研究表明, 对于温度诊断而言, 连续的体温监测比单独测量具有更高的医学价值, 而连续的人体温度监测离不开可穿戴设备和自驱动技术的支持. 因此, 开发一种可以全天连续监测体温的自驱动可穿戴设备具有很重要的医学意义.2012年, Yang等[52]提出了一种基于热释电纳米发电机的自驱动温度传感器, 由单根钛酸锆钛酸铅纳米线制成(图7(a)). 这种纳米线的输出电压与温度变化率呈正相关关系, 室温条件下, 最小温度检测极限为0.4 K, 可用于检测人的指尖温度. 2015年, Zhang等[53]报道了一种柔性自驱动的温度-压力双参数传感器, 该传感器由有机热电材料和微结构支撑框架制成. 基于热电效应和压电效应的耦合作用, 自驱动双参数传感器可同时区分0.1 K的温度变化和28.9 kPa–1的压力变化. 结合喷墨印刷技术, Zhang等[53]制备了高度集成的可穿戴温度传感器阵列(图7(b)). 2015年, Wang等[8]设计了一种复合式纳米发电机, 将两个摩擦纳米发电机和两个电磁发电机巧妙地集成在一个小的丙烯酸盒中(图7(c)). 通过收集呼吸气流的机械能, 该复合式纳米发电机可以持续驱动4个商用温度传感器. 当气流速度为约18 m/s时, 该复合纳米发电机的摩擦纳米发电机部分在3 MΩ的负载电阻最大输出功率为3.5 mW, 电磁发电机部分在2 kΩ的负载电阻下可产生1.8 mW的最大输出功率. 在两种发电机的共同工作下, 无线温度传感器被成功驱动.
 图 7 自驱动柔性体温传感器 (a)基于热释电发电机的自驱动温度传感器[52]; (b)由热电材料制成的自驱动温度-压力双参数传感器[53]; (c)基于复合发电机的温度传感器系统[8]
图 7 自驱动柔性体温传感器 (a)基于热释电发电机的自驱动温度传感器[52]; (b)由热电材料制成的自驱动温度-压力双参数传感器[53]; (c)基于复合发电机的温度传感器系统[8]Figure7. Self-powered flexible temperature sensor. (a) Self-powered temperature sensor based on a PyNG[52]; (b) self-powered temperature-pressure dual-parameter sensor fabricated by organic thermoelectric materials[53]; (c) wireless temperature sensor system based on hybridized nanogenerator[8].
2
4.4.自驱动柔性人工感觉器官
人体通过各种感觉器官感知周边环境, 应对环境的各种变化. 部分残障人士由于器官受损, 可能存在一些感知障碍, 给他们的正常生活带来了许多困扰[54,55]. 自驱动柔性人工感觉器官可以为他们的生活带来极大的帮助. 现阶段, 研究者已经在自驱动柔性听觉传感器、自驱动柔性触觉传感器[56]和自驱动柔性嗅觉传感器等方向上有了一定的突破[57]. 此类人工感觉器官的进步, 一方面可以促进生物医疗领域的发展, 另一方面也会给机器人领域带来很大的推动[58].2018年, Guo等[59]设计了一种人工耳, 这种人工耳将声学信息转换为力学信息, 再根据摩擦纳米发电机的原理将力学信息转换为电学信息进行识别. 摩擦纳米发电机对力学信息的识别具有宽频的特性, 基本能覆盖人日常交流的声音频率(图8(a)). 2018年, Wang等[60]研发制备了一种基于摩擦纳米发电机的透明可拉伸触觉传感器. 器件中的聚乙烯醇通过静电纺丝制成, 结合湿法刻蚀等工艺, 制成了8 × 8的阵列. 该器件兼具高透明度、高压力敏感性、可拉伸性及多点触控操作等特性, 能够同时实现生物机械能收集、触觉感知等功能, 为制备可拉伸透明的触觉传感器提供了一个全新的思路(图8(b)). 2019年, Zhong等[61]构建了一套可以替代人嗅觉的电-脑-行为闭环系统. 基于纳米发电机与生物体嗅觉神经反馈的原理, 这套系统可以使小鼠对危险气体进行识别并做出反馈, 避开危险区域(图8(c)). 随着微电子技术的不断成熟, 此类人工耳蜗, 电子皮肤[62]和人工嗅觉闭环等工作器件的分辨率将越来越精细, 可望满足未来工业和市场的要求.
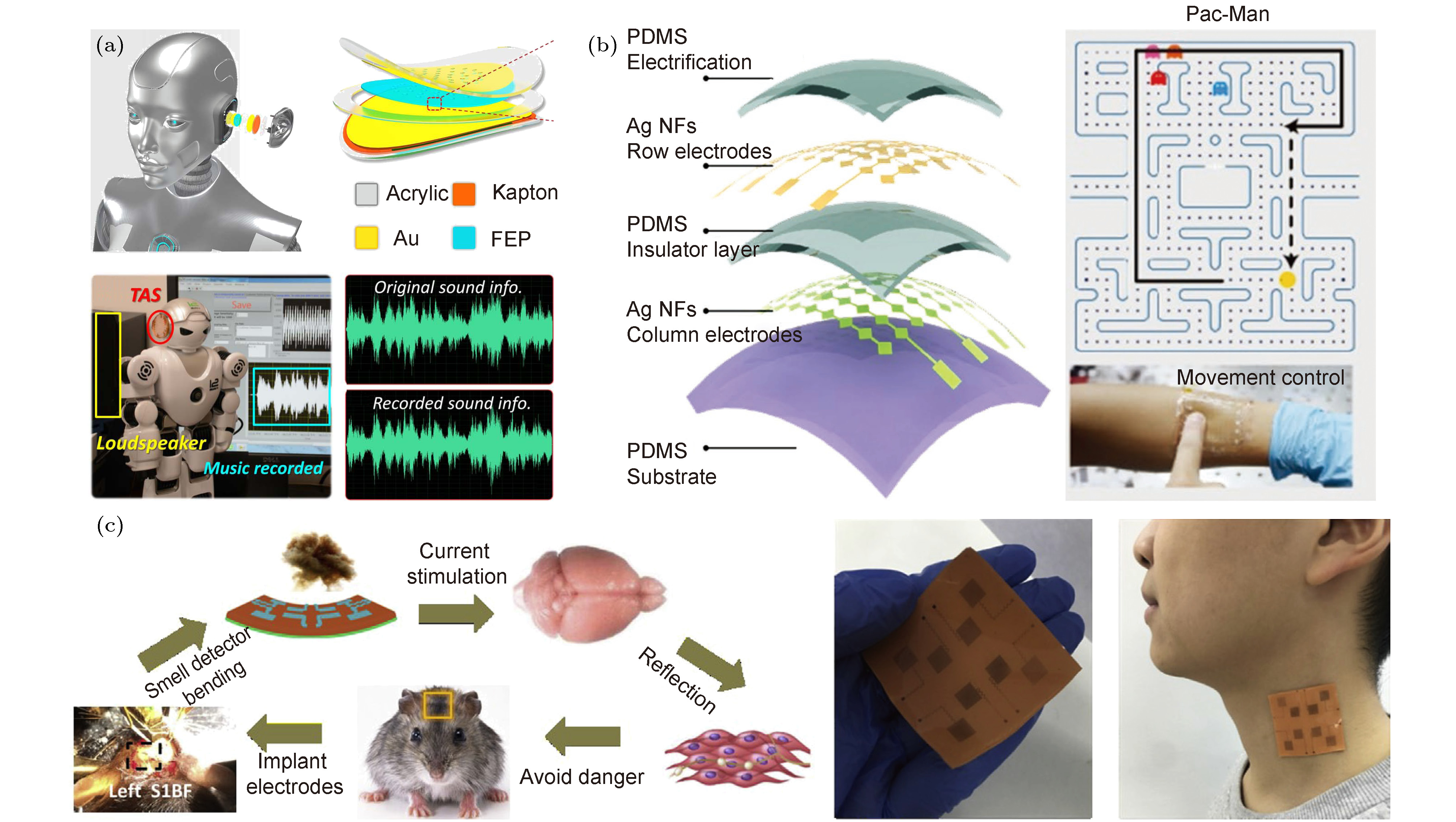 图 8 自驱动柔性人工感觉器官 (a)用于机器人和助听器的自驱动听觉传感器[59]; (b)用于可穿戴电子设备的自驱动触觉传感器[60]; (c)用于智能嗅觉替换的摩擦电-脑-行为闭环[61]
图 8 自驱动柔性人工感觉器官 (a)用于机器人和助听器的自驱动听觉传感器[59]; (b)用于可穿戴电子设备的自驱动触觉传感器[60]; (c)用于智能嗅觉替换的摩擦电-脑-行为闭环[61]Figure8. Self-powered flexible artificial sense organ: (a) Self-powered triboelectric auditory sensor for social robotics and hearing aids[59]; (b) self-powered triboelectric tactile sensor with metallized nanofibers for wearable electronics[60]; (c) an artificial triboelectricity-brain-behavior closed loop for intelligent olfactory substitution[61].
 图 9 自驱动柔性生物传感器的重要研究方向 (a)多功能的传感系统[63]; (b)无线信号传输[65]; (c)柔性人机界面[66]
图 9 自驱动柔性生物传感器的重要研究方向 (a)多功能的传感系统[63]; (b)无线信号传输[65]; (c)柔性人机界面[66]Figure9. Core research directions of self-powered flexible biomedical sensor: (a) Multifunctional sensing system[63]; (b) wireless signal transmission[65]; (c) flexible man-machine interface[66].
在自驱动生物医学传感器研究的早期阶段中, 考虑到信号传输的稳定性, 自驱动生物医学传感器的信号传输方式通常采用有线传输. 随着无线信号传输技术的发展与成熟, 无线信号传输成为自驱动柔性生物传感器的一个重要研究内容[64]. 对于穿戴式自驱动柔性生物医学传感器, 无线信号传输可以节省线路, 简化整个系统的复杂性. 对于植入式自驱动柔性生物医学传感器, 要将体内收集到的信号透皮传输到体外, 同时尽量减少对生物体的损伤, 无线信号传输就显得至关重要. 2019年, Niu等[65]设计的传感器网络, 引入了一种非常规的射频技术, 可以实现对人体脉搏、呼吸和身体运动的连续实时监测(图9(b)).
自驱动生物医学传感器是一种实现人机交互的工具, 因此, 在自驱动生物医学传感器的研制中, 构建良好的人机界面非常重要. 特别的, 因为这些设备应用于生物医疗领域, 又对它们提出了无毒无害和柔性的新要求. Rogers课题组[66]长期专注于柔性电子器件的研究, 2019年, 他们研发了一种无线、无需电池的触觉信息界面, 这种界面可以轻柔地附着在皮肤上, 并通过可编程的局部机械振动来实现触觉信息的远程传输(图9(c)).
首先是自驱动柔性生物医学传感器的器件小型化. 当前, 随着半导体技术的发展与成熟, 电子元器件的尺寸已经足够小且精细, 然而, 当前的自驱动柔性生物医学传感器仍然处于实验室研发阶段, 大部分器件依赖手工制作, 这对器件的高精度和微型化的要求提出了挑战. 研究者们借鉴工业生产中的各项优秀技术, 比如柔性电路板制作和3 D打印技术, 使得自驱动柔性生物医学传感器的精度和微型化得到了很大的提升. 第二个问题是自驱动柔性生物医学传感器的循环稳定性: 一方面, 器件的机械稳定性有待接受复杂环境的考验; 另一方面, 能量收集能力、储能能力、能量转换能力等方面的提升, 可以提升自驱动柔性生物医学传感器的有效工作时间. 现有的能量收集技术在理论上是足够的, 但是在实际应用过程中, 由于多种因素引起的衰减, 效果并不理想. 研究者们利用多层化、阵列化和复合发电机的方案来提高自驱动柔性生物医学传感器发电效率. 此外, 全柔性也是自驱动柔性生物医学传感器需要解决的问题之一. 现有的封装材料和发电材料都可以满足柔性的要求, 但是, 现有的柔性电路技术仍与实际使用的要求相差甚远. 为了实现真正有效的柔性电路, 研究人员提出了各种思路, 如功能性水凝胶、导电聚合物、电子织物[67]和离子导体[68]等.
自驱动柔性生物医学传感器具有广阔的应用前景, 因而受到了广泛的关注和研究. 但是, 缺乏柔性电路和更高效的发电技术的瓶颈限制了自驱动柔性生物医学传感器的发展. 未来新技术和新材料的发现, 将会继续推动自驱动柔性生物医学传感器取得长足的进步和发展.
