全文HTML
--> --> -->针对传统低频天线体积庞大和功耗较大的问题, 2017年美国国防高级研究计划局启动了机械天线(a mechanically based antenna, AMEBA)计划以寻求有效降低极低频/甚低频ULF/VLF (ultra-low frequency/very low frequency)天线尺寸重量和功耗的方法, 国内外众多研究人员针对该项目已有一些研究进展[3-9].
在利用机械装置驱动电场的方法中, 文献[10]建立了一个相对完整的天线模型, 同时对旋转电偶极子方法在理论上进行了分析, 且在考虑材料、形状和功耗等诸多因素的情况下进行了数学建模. 文献[11]通过旋转带不同电荷、平行放置的极板, 使之发生相对运动, 从而产生变化的电场来产生低频电磁波. 而基于机械驱动磁场的方法中, 文献[12]基于并矢格林函数, 详细推导了用于旋转永磁体空间电磁计算的解析表达式, 并验证了其给出的场强计算模型可用于旋转永磁体空间场强的预测; 文献[13]提出了一种使用旋转永磁体产生低频电磁波的机械天线设计. 旋转的永磁体会产生圆偏振电磁波, 自旋磁体的独特特点是所储存的电磁能量是以磁场的近场形式存在的, 无论自旋速度和方向如何, 都是恒定的. 如果磁体的磁化质量比足够高, 摩擦降低得足够小, 则旋转磁体所需的机械能转化为电磁能的效率较高, 但其缺点在于永磁体质量较大, 因此天线设计的质量和所需功耗都会较大. 文献[14]在此基础上进一步利用旋转磁体阵列产生低频电磁波. 通过同步旋转的小磁铁阵列, 以模拟更大的旋转圆盘的磁场特性, 同时显著降低其耗费的机械能密度. 此外, 文献[15]中提出, 从宏观角度看, 旋转均匀磁化的永磁体效果等效于在其表面上施加电流, 并基于此理论建立了模型, 进行了相关理论计算和公式推导.
机械天线技术给低频天线的小型化提供了可能, 然而目前的理论分析和建模方法主要集中于旋转永磁体和带电极板式机械天线, 相比于永磁体式机械天线, 驻极体式机械天线产生的磁场有较慢的衰减速率, 有更强的远区磁场, 同时其磁场强度与频率成正比, 因此则在远场和更高频段的应用方面具有优势[16]; 同时由于永磁体和带电极板的质量较大, 其所需相配合的支撑结构也较为复杂, 因此会导致发射天线的质量较大, 从而使用机械装置驱动时功耗也较高. 而随着高电荷密度复合驻极体材料技术的日益成熟[17,18], 基于柔性驻极体材料的机械天线与其他相比, 还具有质量较小、可塑性高、易于加工的优点. 驻极体是指在自然条件下长时间存储空间电荷和极化电荷并在宏观条件下显示电场极性的材料, 通过电晕法或热极化法等方法极化后, 驻极体可以保持极性几年甚至几十年, 因此驻极体也被称为类似永磁体的永久电体[19-21]. 驻极体材料制造技术的成熟为设计和制造机械天线提供了材料支持, 使用柔性驻极体薄膜取代永磁体或带电极板能够进一步降低天线质量, 从而减小低频机械天线的功耗. 但目前对基于驻极体的机械天线研究极少, 属于前沿领域[22,23]. 同时, 由于低频通信、导航系统重要的意义和目前迫切的军事需求, 对低频机械天线技术进行研究有着重大意义. 因此, 本文研究了一种基于旋转驻极体式机械天线的理论分析和数学解析模型.
2.1.驻极体式机械天线结构设计
本文讨论的低频机械天线采用机械运动方式加速驻极体材料上的驻极电荷, 以实现电磁波的高效辐射. 天线外壳为圆筒形, 并附着有对称且带有异种电荷的驻极体薄膜. 驻极体薄膜旋转时会产生方向相反的两股环形电流, 两电流所产生的磁场相互叠加, 以向外高效传播磁场. 天线结构如图1所示. 图 1 基于驻极体材料的圆筒形机械天线结构
图 1 基于驻极体材料的圆筒形机械天线结构Figure1. Cylindrical mechanical antenna structure based on electret material.
由于驻极体材料厚度较薄, 附着在一定支撑结构上进行旋转时薄膜的厚度可以忽略不计, 因此可将单层的驻极体材料及支撑结构构成的天线抽象成一个仅带有面电荷的圆筒(见图2(a)). 同时由于氟化乙丙共聚物(FEP)薄膜具有厚度薄、易加工的特性, 可利用驻极体材料完成多层、复杂结构的天线设计. 该种多层驻极体的天线结构可抽象成对应层数的同心圆筒(见图2(b)). 简化起见, 本文建模中将仅讨论圆筒形单层圆筒结构和两层同心圆筒结构的发射天线, 其中仅有圆筒外壁带面电荷, 其余部分不带电.
 图 2 有多层驻极体薄膜的天线模型 (a)单层驻极体; (b)两层驻极体
图 2 有多层驻极体薄膜的天线模型 (a)单层驻极体; (b)两层驻极体Figure2. Antenna model with multilayer electret film: (a) Single layer; (b) double layers.
2
2.2.机械天线磁场传播模型建立
32.2.1.平面带电圆环式天线的磁场传播模型
旋转驻极体式机械天线的天线外壳上附着有对称且带有异种电荷的驻极体薄膜, 驻极体薄膜旋转时会产生方向相反的两股环形电流, 进而产生磁场, 然后可以通过接收点处的磁场传感器获得磁场信号. 对于圆筒产生的磁场, 可认为是每一个平面圆环产生磁场的叠加, 因此可用每个平面圆环所产生磁场在竖直方向上的积分来计算. 由于驻极体材料厚度较薄, 且其支撑结构不带电, 所以可忽略带电体厚度, 将平面带电圆环简化为图3所示结构. 图 3 沿X轴的信号接收点磁场计算示意图
图 3 沿X轴的信号接收点磁场计算示意图Figure3. Calculation diagram of magnetic field of signal receiving point along X axis.
磁场使用毕奥-萨伐尔定理进行计算, 每个发射天线中电流微元产生的磁感应强度



易知电荷密度

当忽略发射天线尺寸时天线微元指向磁场信号接收点的距离D等于到原点的距离x, 利用对称性, 计算接收点磁感应强度为
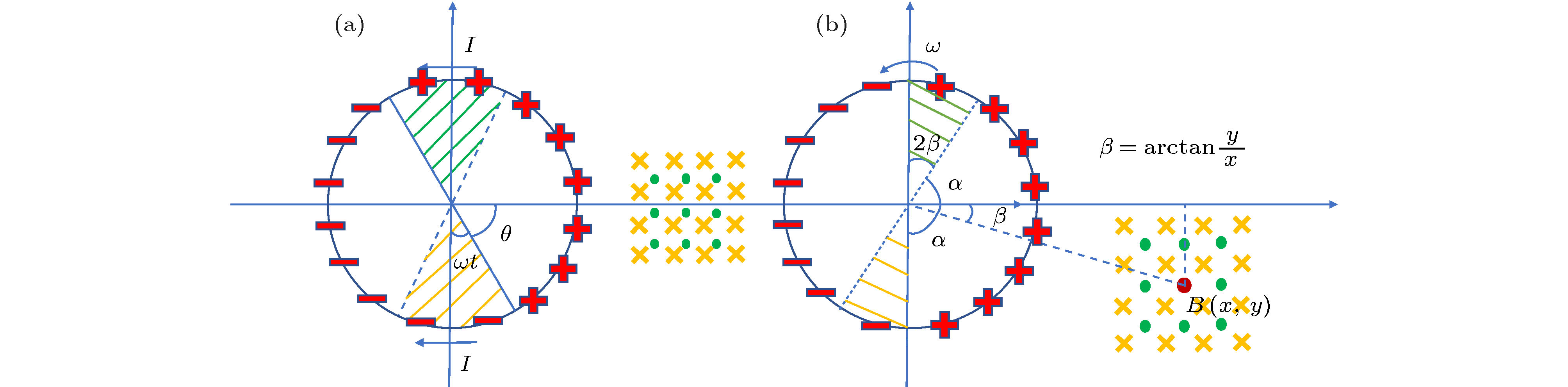 图 4 信号接收点分布于X-Y平面时的磁场计算示意图
图 4 信号接收点分布于X-Y平面时的磁场计算示意图Figure4. Schematic diagram of magnetic field calculation when signal receiving point is distributed in X-Y plane.

若信号接收点不在X轴上而是处于X-Y平面中任意位置时(图4(b)). 发射天线中的绿色部分和黄色部分产生的磁场将会相互抵消(此时




由(7)式、(10)式及(12)式可知, X-Y平面中任意位置, 任意时刻的磁感应强度计算公式如下:
综上所述, 研究磁感应强度模随距离D的变化可简化为磁感应强度模随x轴上点横坐标的变化.
3
2.2.2.圆筒式天线的三维磁场传播模型
对平面圆环产生的磁场在高度上积分(图5), 即可得到三维圆筒式天线的磁场传播模型, 下面分别讨论忽略发射天线尺寸和考虑发射天线尺寸时的磁场传播模型. 图 5 圆筒式天线所产生磁场计算示意图
图 5 圆筒式天线所产生磁场计算示意图Figure5. Calculation diagram of magnetic field generated by cylindrical antenna.
当忽略发射天线尺寸时, 对于空间中任意信号接收点P (x, y, z), 由(5)—(7)式可知:

当考虑发射天线尺寸时, 对于空间中任意信号接收点P (x, y, z), 由(5)式、(6)式及(9)式可知:
3.1.机械天线的参数选择
由于研究对象是用于低频段电磁波发射, 且电磁波频率与天线转速有关, 取ω = 100 rad/s, 即15.92 Hz.驻极体材料目前充电量达10–2—10–4 C/m2[24], 假设圆筒支撑结构的表面紧密贴合所选用的驻极体薄膜, 即圆筒的表面电荷密度等于驻极体表面电荷密度, 由于不同类型的驻极体材料带电能力不同, 且需考虑到驻极体工作在恶劣环境(如高湿度、机械作用等)下的稳定性, 无法长时间保持最大充电量, 所以本文选取表面电荷密度为σ = 10–4 C/m2. 磁导率


由于天线小型化的要求, 令圆筒半径R, 高度H在0—1 m范围内取值. 而对于双圆筒内径, 令其为外径的一半.
2
3.2.磁感应强度与计算磁场点到圆筒外径距离关系的探究
当天线结构为单圆筒时, 固定天线高度H为0.1 m, 分别设天线半径R = 0.55和1 m, 接收点处的磁感应强度如图6所示.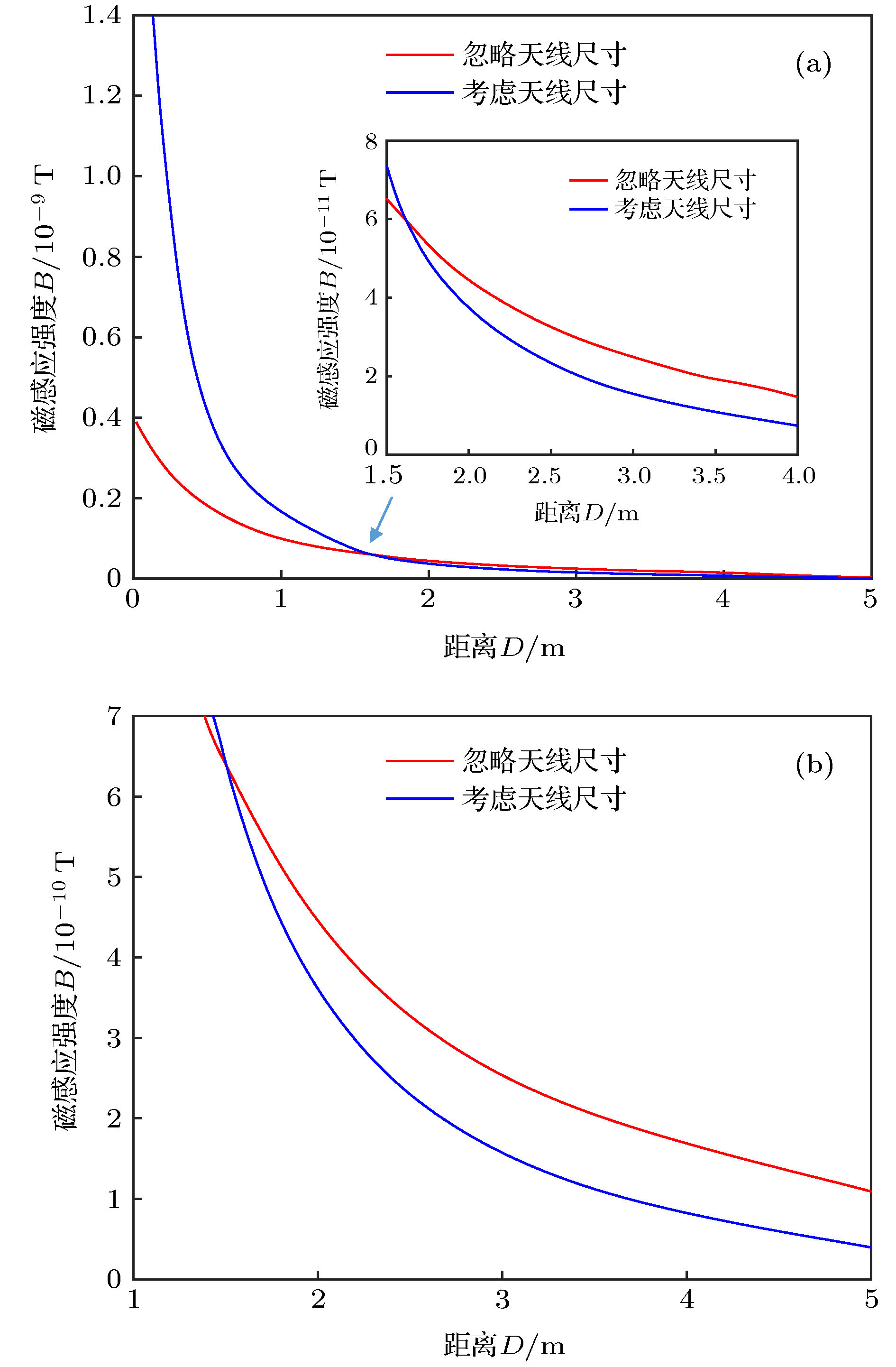 图 6 磁感应强度B随距离D变化(单圆筒) (a) R = 0.55 m, H = 0.1 m; (b) R = 1 m, H = 1 m
图 6 磁感应强度B随距离D变化(单圆筒) (a) R = 0.55 m, H = 0.1 m; (b) R = 1 m, H = 1 mFigure6. Change of magnetic induction intensity B with distance D (single cylinder): (a) R = 0.55 m, H = 0.1 m; (b) R = 1 m, H = 1 m.
由图6可见, 随着接收点到天线表面距离D的增加, 考虑天线尺寸和忽略天线尺寸两种方法计算出的磁感应强度误差总体上越来越小. 这表明当距离较远时, 可以使用忽略天线尺寸的磁场传播模型((16)式)代替考虑天线尺寸的磁场传播模型((21)式)进行建模, 以牺牲一定精度为代价换取计算速度的提升.
当R = 1 m时, 可以发现随距离D增加, 两种方法计算的磁感应强度之间的误差会先减小后增大, 明显地出现一个转折点, 最后一直保持一个较稳定的范围(见图6(b)). 误差在交点之前不断减小, 在交点处达到最小, 之后逐渐增大直至保持较稳定的范围内.
因此, 为了得到更加准确和详细的误差E与距离D关系, 需要进一步研究了不同参数和不同天线结构参数下的模型误差与距离D的关系.
2
3.3.两种磁场传播模型产生误差与距离关系的探究
图7给出了磁场传播模型误差E在不同天线结构中随距离D的变化. 不同天线结构仅对产生误差的大小有所影响, 并不影响误差变化的趋势. 图 7 误差E随距离D的变化 (a) 单层圆筒结构; (b) 双层圆筒结构
图 7 误差E随距离D的变化 (a) 单层圆筒结构; (b) 双层圆筒结构Figure7. Variation of error E with distance D : (a) Single cylinder; (b) double cylinder.
以单圆筒时H = 0.5 m情况为例, 比较半径R对误差E的影响(见图7(a)的中间子图). 在相同高度H和相同距离D下, 半径R越大的天线, 两种模型的误差越大. 而对于相同半径R和相同距离D下, 高度H越大的天线, 两种模型产生的误差也越大. 因此当天线的尺寸较大, 且信号接收点又较近时, 必须考虑天线自身尺寸带来的影响, 否则会带来较大误差.
当天线尺寸较大时两种方法的误差曲线会出现转折点. 从图7可发现, 当天线尺寸越大时, 误差会越明显地出现一个转折点, 且双层圆筒结构比单层圆筒结构现象更加明显. 同时, 通过转折点不久后误差一直保持一个较稳定的范围. 这一点可以从图6及(16)式和(21)式中得到解释. 当距离较近时, 考虑天线尺寸的模型得出的磁感应强度大于未考虑天线尺寸的模型, 而当距离较远时, 情况却相反. 因此误差会出现一个转折点, 且此转折点大致与圆筒外径相等. 当高度与半径比值适中时两者产生误差保持在相对稳定的较小范围内, 可以忽略. 因此在图6中的交点后、图7中的转折点后找到一个临界点, 可以使用忽略天线尺寸的方法计算接收点处的磁感应强度, 即可在不损失精度的情况下同时提升计算速度. 除此之外, 通过以上讨论, 可以在此区间找到使误差满足精度要求的临界点, 并定义其为可使用忽略天线尺寸的模型进行磁感应强度计算的阈值.
2
3.4.两种磁场传播模型产生误差与高宽比关系的探究
由3.3节的讨论可以发现, 圆筒形天线的高宽比对误差的影响很大, 因此本节探究不同高宽比对距天线表面距离相同点处误差的影响. 控制信号接收点距天线表面距离D恒为5.5 m, 比较圆筒形天线高宽比为0.1—10时是否考虑天线尺寸引起的误差大小, 结果如图8所示. 图 8 同一信号接收点处磁感应强度及误差与高宽比关系 (a) 单层圆筒结构; (b) 双层圆筒结构
图 8 同一信号接收点处磁感应强度及误差与高宽比关系 (a) 单层圆筒结构; (b) 双层圆筒结构Figure8. Relationship of magnetic induction intensity and error to ratio at the same signal receiving point: (a) Single cylinder; (b) double cylinder.
从图8不难看出, 双圆筒与单圆筒产生的误差变化规律相同. 图8(a)中单圆筒在高宽比为0.65附近达到峰值, 图8(b)中双圆筒在高宽比在0.7附近达到峰值. 当高宽比在0.1—0.65之间时, 随高宽比增加误差迅速增长, 当高宽比大于2之后随高宽比增长误差缓慢减小. 且随高宽比的增大, 在同一信号接收点产生的磁感应强度逐渐减小.
由此可知, 当信号接收点与天线距离较近时, 不同高宽比圆筒形天线计算磁感应强度时忽略天线尺寸带来的误差存在峰值, 当高宽比在0.1—0.2之间时可获得较小误差. 因此, 圆筒形天线的高宽比对误差影响很大, 在设计时需要加以注意.
为了进一步探究高宽比对不同信号接收点处误差的影响, 控制信号接收点距天线表面距离D恒为5.5, 10, 50 m, 比较高宽比在0.1—10时产生误差大小, 结果如图9所示.
 图 9 不同距离信号接收点处误差与高宽比关系 (a) D = 5.5 m; (b) D = 10 m; (c) D = 50 m
图 9 不同距离信号接收点处误差与高宽比关系 (a) D = 5.5 m; (b) D = 10 m; (c) D = 50 mFigure9. Relation between error and ratio at signal receiving points of different distance: (a) D = 5.5 m; (b) D = 10 m; (c) D = 50 m.
对比图9(a)—(c)可以发现, 信号接收点距天线越远, 误差的峰值就越不明显, 甚至消失, 此时可认为在远距离的信号接收点处的误差随高宽比增大而减小, 且此时误差减小与具有较大高宽比天线在远处产生磁场较小有关, 可从图8中得到解释.
