全文HTML
--> --> -->悬臂梁结构是一种可实现多稳态特征的常见结构, 这是因为: 悬臂梁加工简单、刚度低、灵敏度高[7,8], 在较小激励力下就可发生较大的变形; 在悬臂梁自由端粘贴一块磁铁, 并在与其相对的外部支撑部件上粘贴一块或多块磁铁, 利用磁铁间的相互作用, 就可构造出不同类型的多稳态结构, 比如双稳态、三稳态、四稳态等结构; 悬臂梁及其自由端的磁铁一般可以简化为等效的质量-弹簧-阻尼力学模型[9], 方便系统的势函数及动力学分析.
多稳态悬臂梁结构常见于振动能量收集系统中, 且以双稳态梁[10-12]和三稳态梁[13-15]的结构形式为主. 陈仲生和杨拥民[10]研究了外加磁力的双稳悬臂梁压电振子的振动特征, 从随机共振角度解释了双稳悬臂梁优于传统线性悬臂梁, 具有宽频的振动响应特性的原因; Podder等[11]在研究双稳梁电磁振动能量收集中, 通过调整两磁铁的间距优化了系统的频率响应, 并用数值法分析了中、低加速度激励下势阱深度对能量收集的影响; Gao等[12]通过外部磁铁的弹性支撑设计, 研究了弹性支撑双稳悬臂梁的压电振动能量收集方式, 发现弹性支撑能量收集系统不需要实时调整磁铁间距, 就能够很好地迎合强度时刻变化的随机激励源. Leng等[13]研究了三稳悬臂梁的压电振动能量收集方式, 得到了在0—120 Hz的随机激励下其发电效果优于双稳悬臂梁压电振动能量收集方式的结果; Zhou等[14]通过改变三稳悬臂梁中外部磁铁的摆放角度, 研究了一种倒挂式的压电振动能量采集器, 准确得到了系统的非线性刚度和跳跃频率; Deng和Wang[15]把三稳悬臂梁电磁振动能量收集器的外部磁铁沿圆弧摆放, 研究了不同结构参数对系统输出功率的影响.
在上述利用双稳或三稳悬臂梁结构研究振动能量收集中, 一个显然存在的问题是: 如果系统需要引入更多的非线性稳态数量, 那么需要的磁铁数量也会相应增加, 其结果是可调节的参数不断增多, 这增大了结构的复杂性和系统动力学分析的繁琐性, 不利于系统结构的优化设计.
为了解决多稳态悬臂梁的这一问题, 本文提出双磁铁实现多稳态悬臂梁的构型, 仅利用两个磁铁的相互作用, 通过改变其中一个磁铁的尺寸, 在不同磁铁间距下, 即可实现单稳态、双稳态、三稳态、四稳态特征. 这种双磁铁多稳态悬臂梁构型, 将大大简化系统设计、动力学分析、调试安装等方面的复杂性, 为诸如多稳态悬臂梁结构的振动能量收集系统的设计应用, 提供新的思路和技术方法.
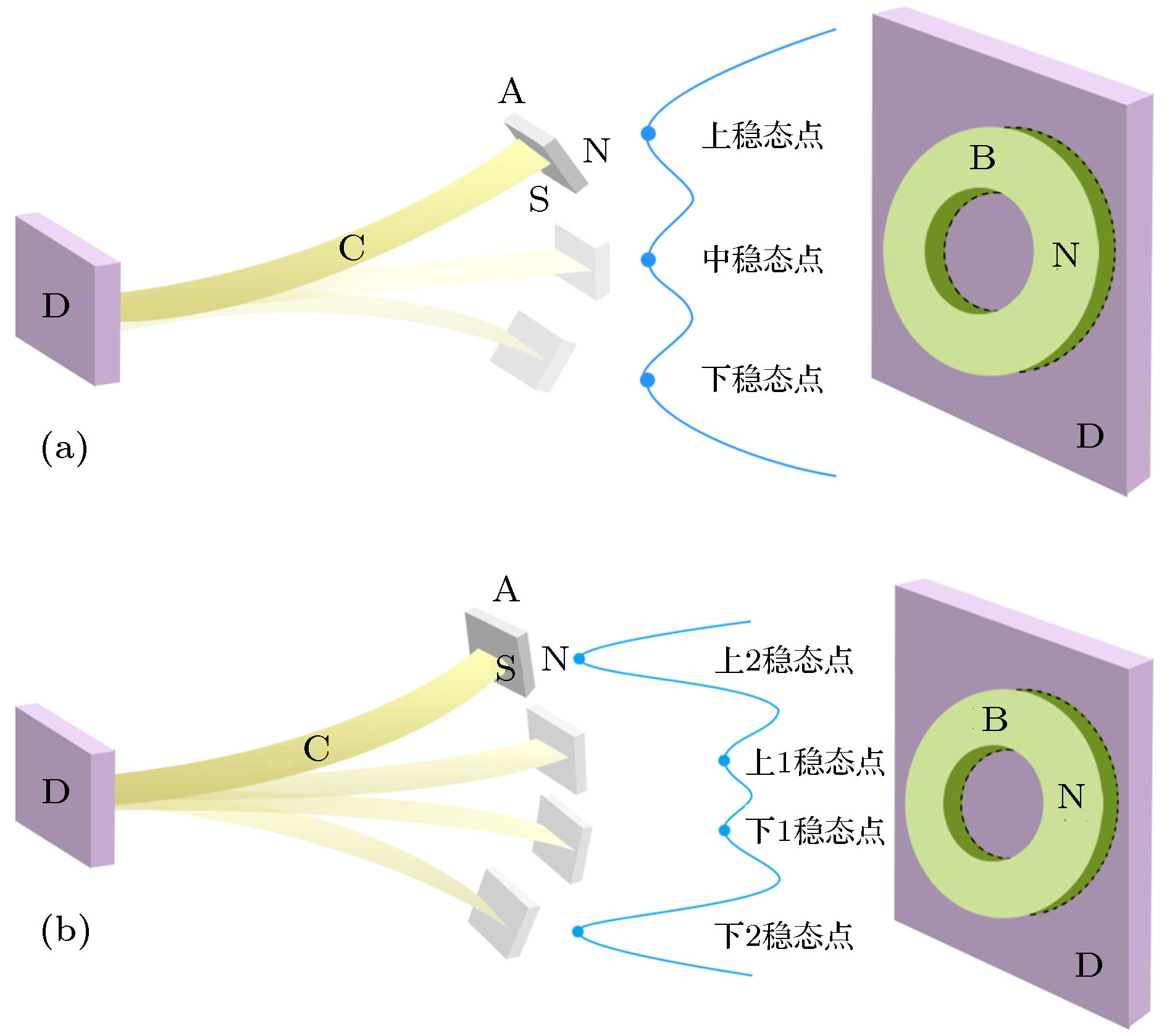 图 1 双磁铁多稳态悬臂梁 (a) 三稳状态; (b) 四稳状态
图 1 双磁铁多稳态悬臂梁 (a) 三稳状态; (b) 四稳状态Figure1. Multi-stable cantilever beam with two magnets: (a) The state concluding three stable points; (b) the state concluding four stable points.
对于该双磁铁多稳态悬臂梁系统, 根据牛顿第二定律, 其动力学方程为:



mA, mC, IC,



为了分析系统的多稳态特征, 首先需要计算两磁铁间的磁力, 然后对不同结构参数的系统进行势函数分析并进行实验验证, 最后在一定结构参数条件下对系统进行随机激励的动力学响应分析.
磁化电流法的基本理论认为[19,20]: 磁铁周围之所以存在磁场, 是因为被均匀磁化的铁磁体材料内部和表面存在分子电流, 且由于材料内部两相邻电流环的方向相反、相互抵消, 因此其内部电流总和为0, 相当于只有材料表面存在分子电流. 两块磁铁间的相互磁作用力可以视为一个磁铁的表面磁化电流在由另一个磁铁的表面磁化电流产生的磁场中所受的安培力. 所以, 可以把图1中环形磁铁和矩形磁铁之间的磁力计算分为三个步骤: 1)求解环形磁铁表面磁化电流在空间任一点产生的磁感应强度; 2)根据悬臂梁自由端的位移确定矩形磁铁表面磁化电流在空间中的位置; 3)计算二者之间的安培力(即磁力).
2
3.1.环形磁铁在空间中任一点的磁感应强度
根据磁化电流基本理论可知, 环形磁铁内环曲面和外环曲面的磁化电流方向相反, 于是环形磁铁产生的磁场空间中的任一点的磁感应强度, 可看成是内外两个环电流在空间任一点的磁感应强度之矢量和. 由于环形磁铁的内环电流和外环电流都是圆形电流, 因此可任选一圆形实心磁铁, 计算其空间中任一点的磁感应强度.磁铁表面磁化电流面密度可表示为[21,22]:


对于一个如图2所示的圆形实心磁铁, 设其磁化强度为



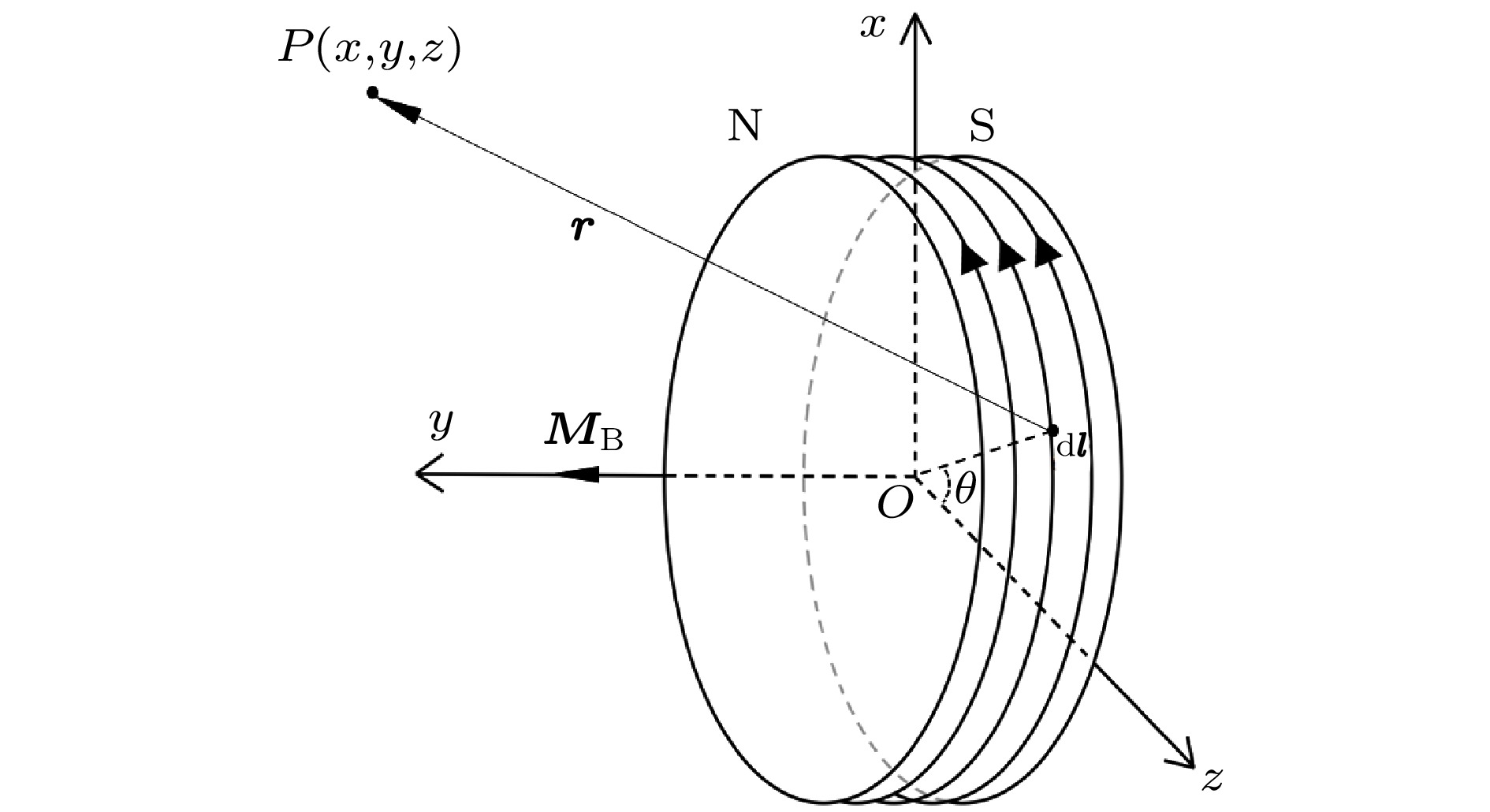 图 2 空间坐标系及圆形实心磁铁的磁化电流示意图
图 2 空间坐标系及圆形实心磁铁的磁化电流示意图Figure2. Schematic diagram of there-dimension coordinate system and magnetizing currents on the surface of the circular magnet.


根据毕奥-萨伐尔(Biot-Savart)定律, 磁铁表面磁化电流中的一个微小电流元





| 材料 | 参数 | 数值 |
| 悬臂梁材料: 矽钢 | 弹性模量EC/GPa | 200 |
| 密度ρC/kg·m–3 | 7700 | |
| 长度lC/mm | 60 | |
| 宽度wC/mm | 10 | |
| 厚度tC/mm | 0.15 | |
| 矩形磁铁材料: Nd2Fe14B (牌号N35) | 密度ρA/kg·m–3 | 7500 |
| 长度lA/mm | 10 | |
| 宽度wA/mm | 10 | |
| 厚度tA/mm | 3 | |
| 磁化强度MA/A·m–1 | 6 × 105 | |
| 环形磁铁材料: Nd2Fe14B (牌号N35) | 密度ρB/kg·m–3 | 7500 |
| 厚度tB/mm | 3 | |
| 外环直径φ1/mm | 40 | |
| 内环直径φ2/mm | 20 | |
| 磁化强度MB/A·m–1 | 6 × 105 | |
| 真空磁导率μ0/N·A–2 | 4π × 10–7 |
表1悬臂梁、矩形磁铁、环形磁铁的材料和参数
Table1.Materials and parameters of cantilever beam, rectangular magnet, and ring magnet.

对于图2所示的坐标系中的圆形实心磁铁, 取I为距xz平面为












因此,















| 实验器材 | 型号 |
| 高斯计 | BST100 |
| 推拉式测力计 | HF-5 |
| 激光位移传感器 | LK-G5001V |
表2实验器材及其型号
Table2.Experimental equipments and models.
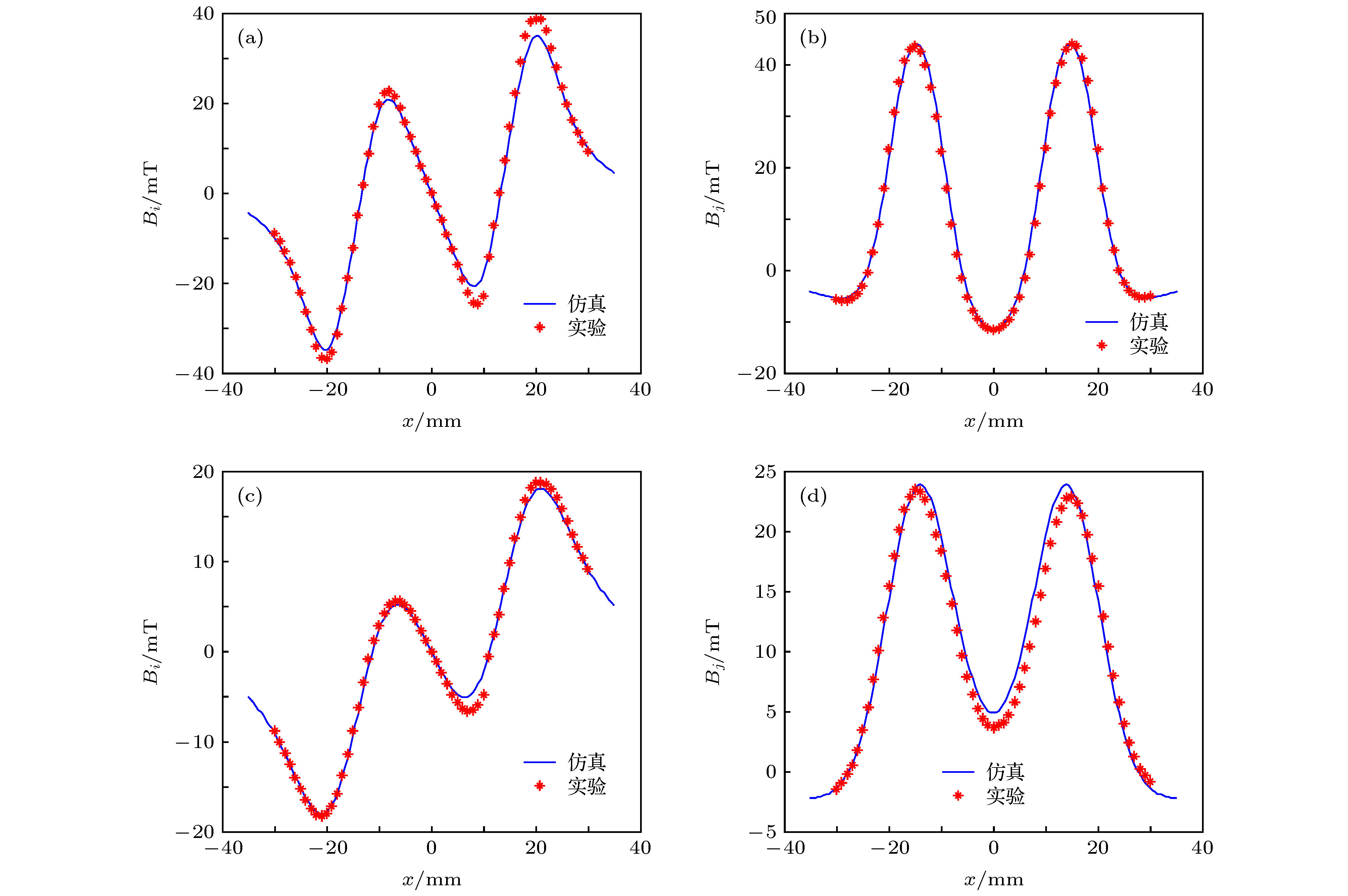 图 3 磁感应强度Bi, Bj随x的变化关系 (a) Bi随x的变化, y = 6.0 mm; (b) Bj随x的变化, y = 6.0 mm; (c) Bi随x的变化, y = 10.0 mm; (d) Bj随x的变化, y = 10.0 mm
图 3 磁感应强度Bi, Bj随x的变化关系 (a) Bi随x的变化, y = 6.0 mm; (b) Bj随x的变化, y = 6.0 mm; (c) Bi随x的变化, y = 10.0 mm; (d) Bj随x的变化, y = 10.0 mmFigure3. The curves of Bi and Bj varying with x: (a) The curves of Bi varying with x, y = 6.0 mm; (b) the curves of Bj varying with x, y = 6.0 mm; (c) the curves of Bi varying with x, y = 10.0 mm; (d) the curves of Bj varying with x, y = 10.0 mm.
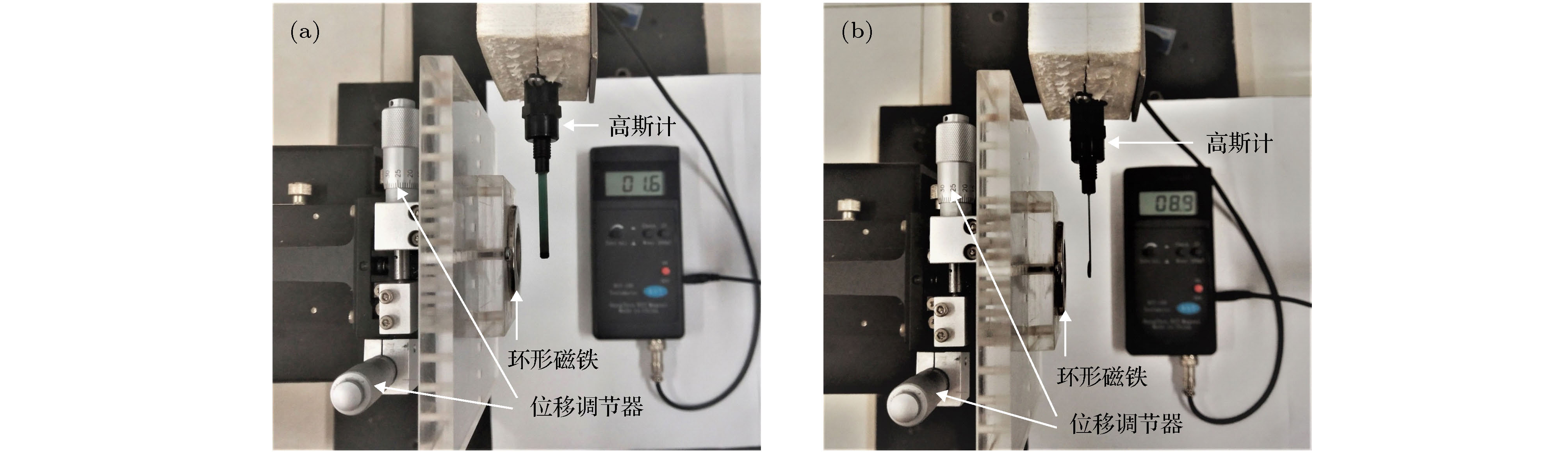 图 4 磁感应强度测量系统 (a)Bi测量; (b)Bj测量
图 4 磁感应强度测量系统 (a)Bi测量; (b)Bj测量Figure4. Magnetic induction intensity measurement system: (a) The measurement of Bi; (b) the measurement of Bj.
2
3.2.矩形磁铁磁化电流在空间中的位置
悬臂梁在振动过程中会发生弯曲, 并使得梁自由端的磁铁发生偏转, 如图5所示, 因此需要准确计算磁铁位置才能确定矩形磁铁磁化电流在空间中的位置.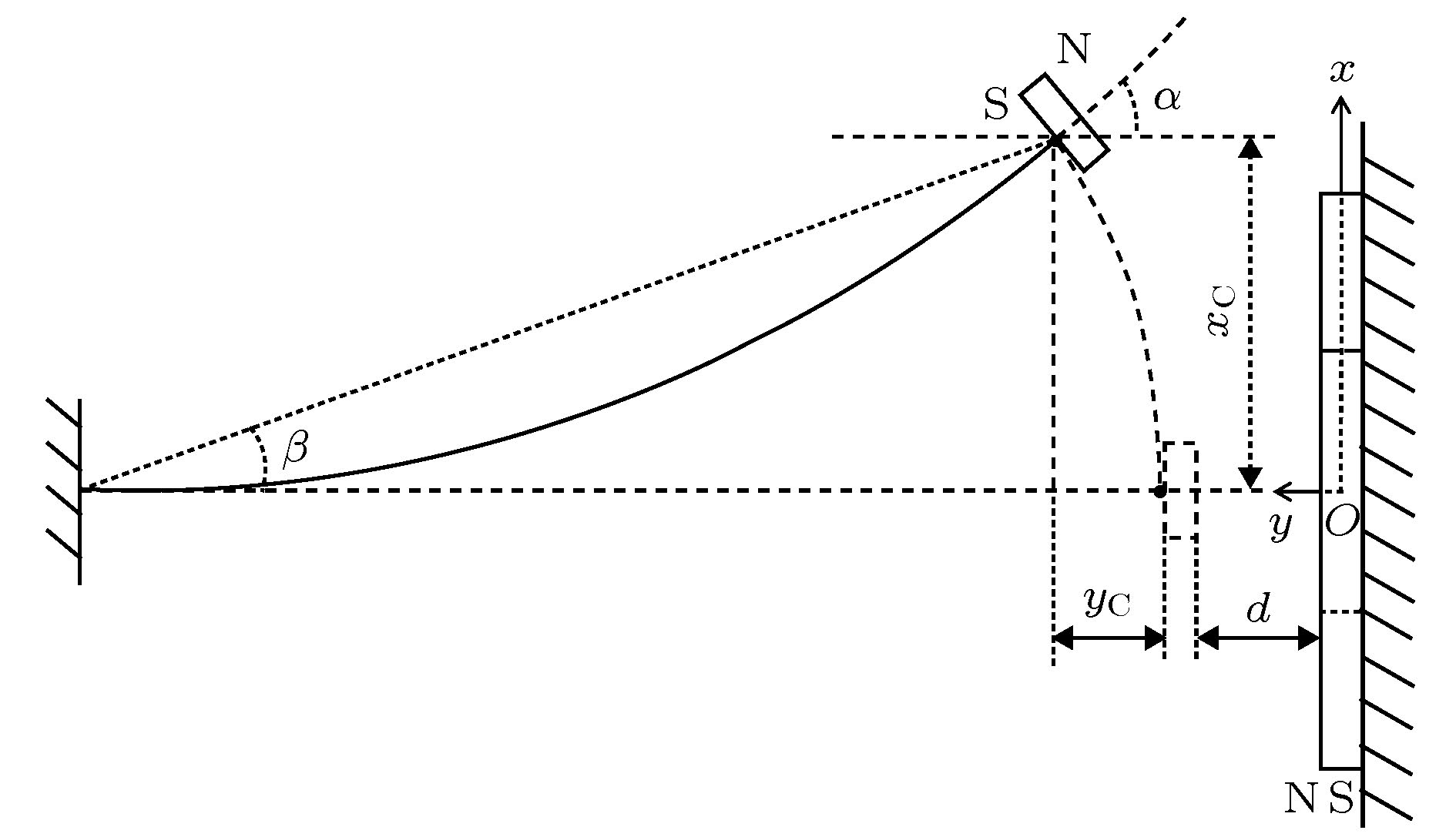 图 5 悬臂梁弯曲状态及其矩形磁铁的坐标位置
图 5 悬臂梁弯曲状态及其矩形磁铁的坐标位置Figure5. The position of the rectangular magnet in coordinate system when the cantilever beam is bent.
悬臂梁在弯曲时, 其自由端水平位移yC与竖直位移xC的几何关系受梁的长短、厚薄、材料等因素的影响, 现有的经验计算方法有两种, 如(16a)式[21,22]和(16b)式[20]:






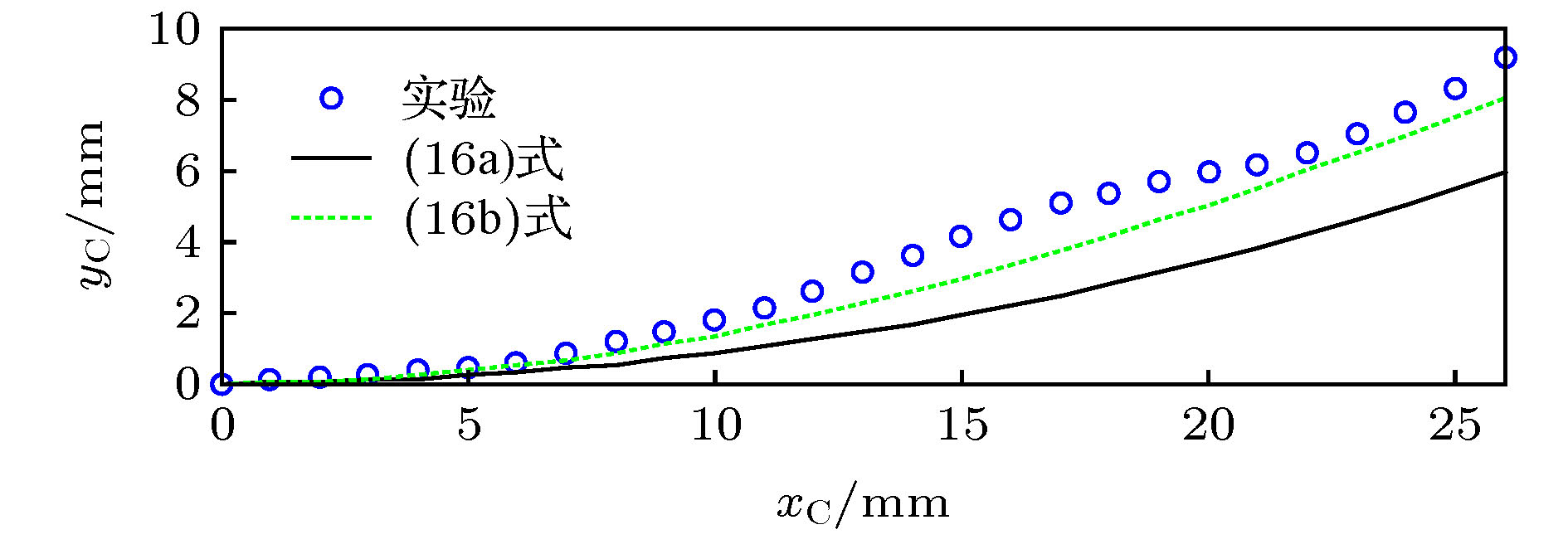 图 6 梁自由端磁铁位置的两种计算方法
图 6 梁自由端磁铁位置的两种计算方法Figure6. Two kinds of calculation of the position of the magnet at the free end of the beam.
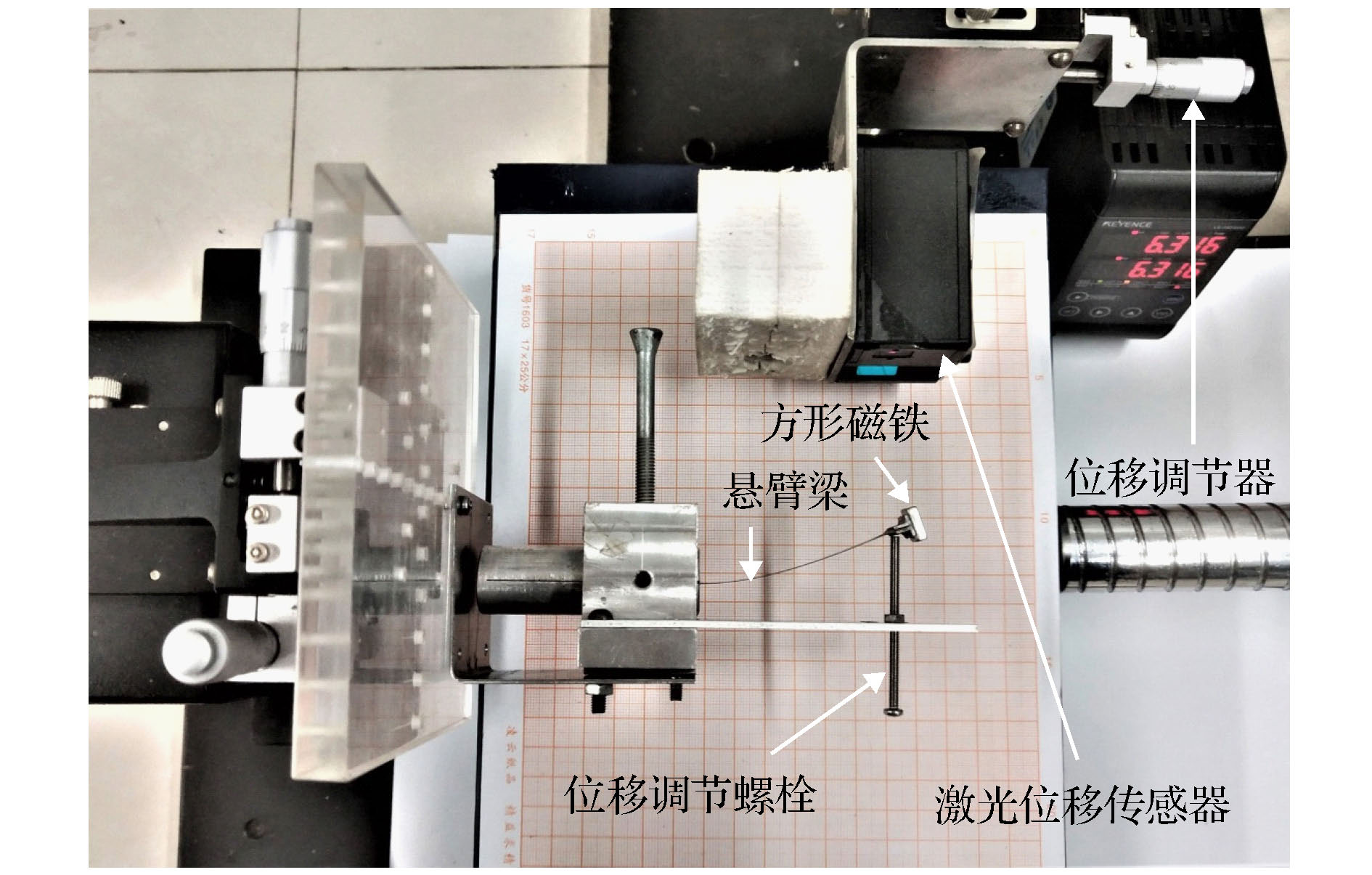 图 7 位移测量系统
图 7 位移测量系统Figure7. Displacement measuring device.
对于悬臂梁弯曲时其自由端矩形磁铁的偏转角α, 由经验公式(17)式确定:


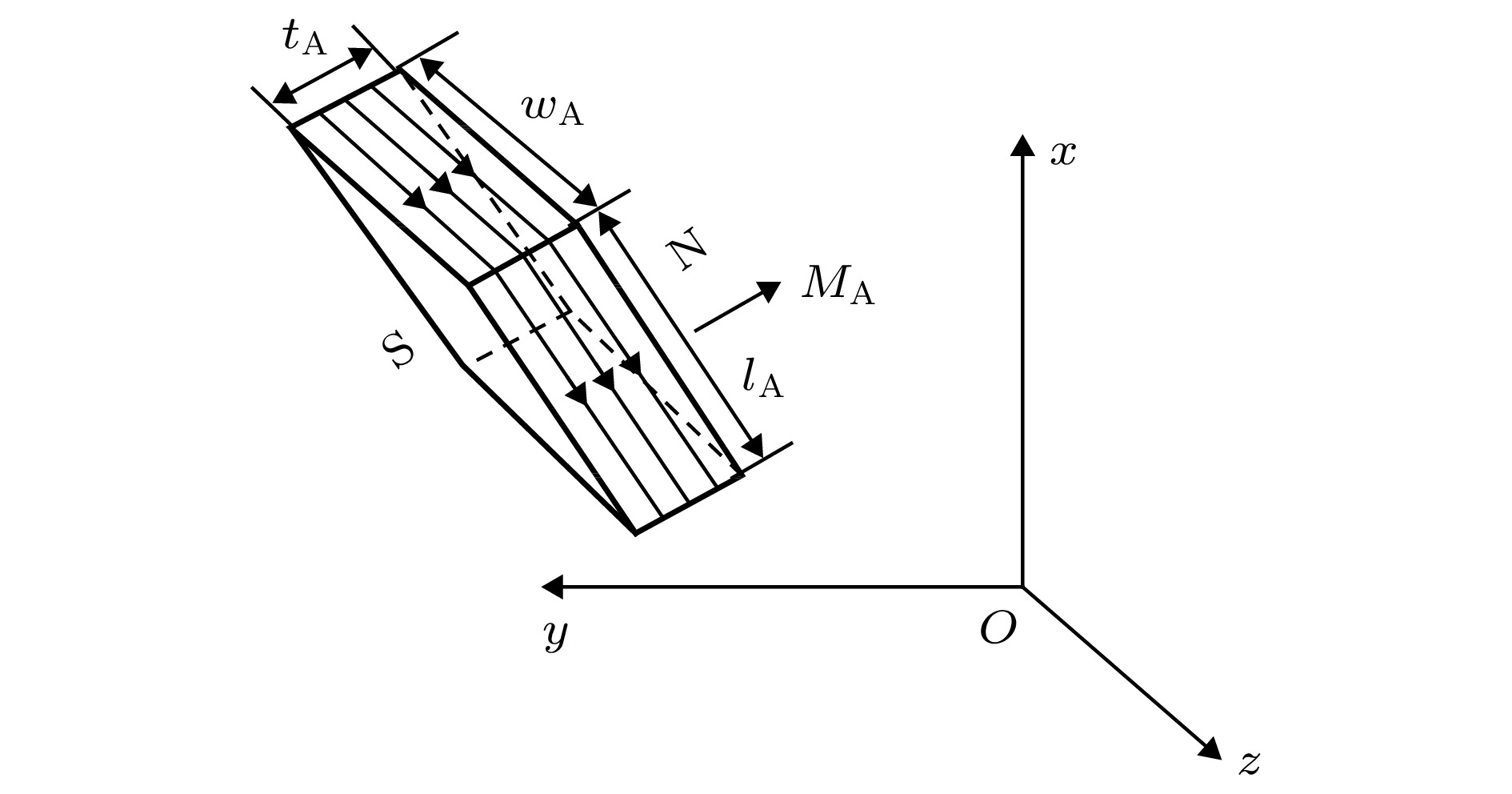 图 8 矩形磁铁尺寸及磁化电流示意图
图 8 矩形磁铁尺寸及磁化电流示意图Figure8. Schematic diagram of the size of the rectangular magnet and the magnetizing currents on the surface of the rectangular magnet.
根据(16b)式和(17)式, 结合图5和图8, 当悬臂梁的自由端竖直位移为






2
3.3.矩形磁铁与环形磁铁间的磁力
矩形磁铁表面磁化电流在环形磁铁产生的磁场中所受的安培力可表示为[21]:





为了验证(20)式的合理性, 在图5的坐标系中, 任取d = 5.8 mm和d = 8.0 mm两个值, 根据表1中的参数, 对(20)式进行数值仿真, 得到






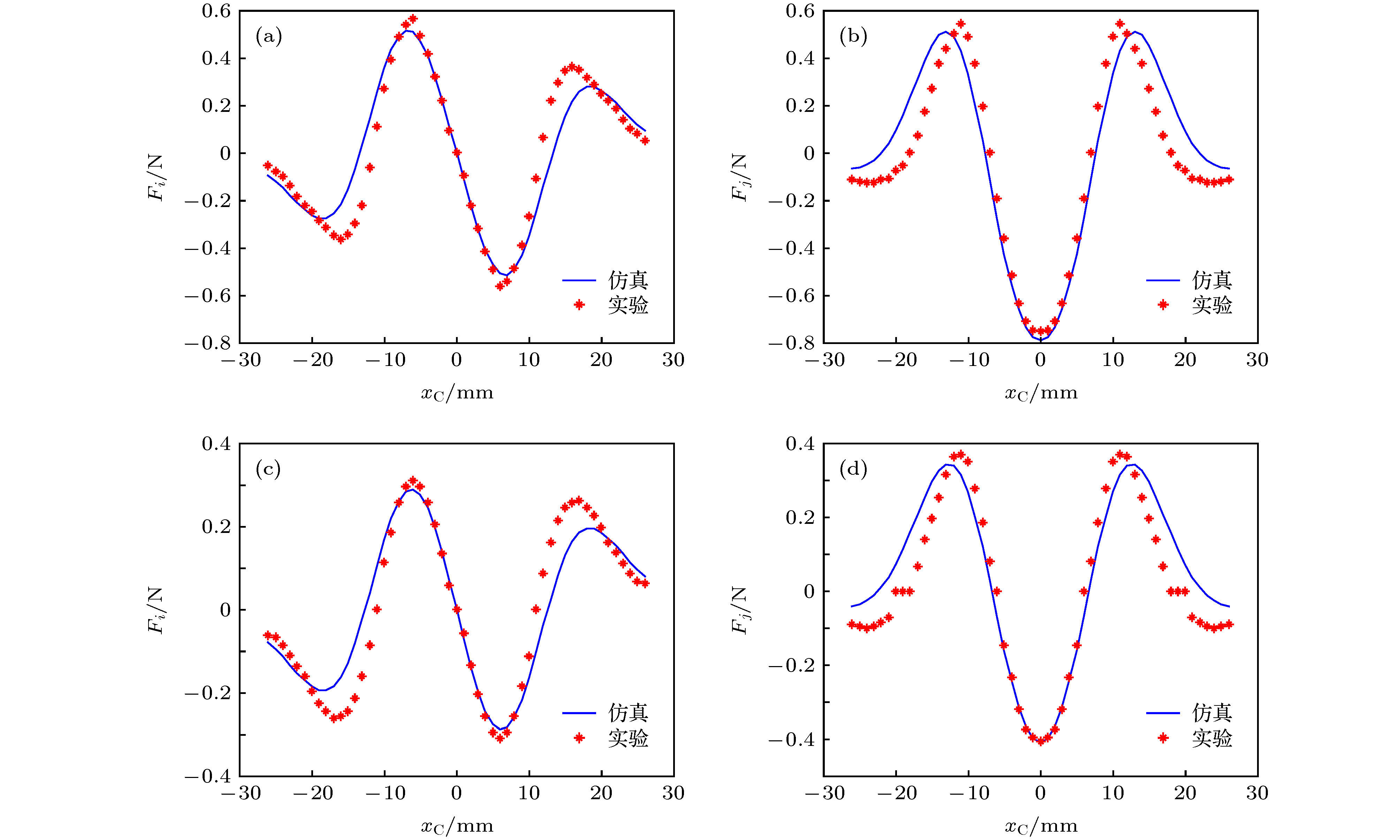 图 9 Fi, Fj随xC的变化关系 (a) Fi随xC的变化关系, d = 5.8 mm; (b)Fj随xC的变化关系, d = 5.8 mm; (c) Fi随xC的变化关系, d = 8.0 mm; (d) Fj随xC的变化关系, d = 8.0 mm
图 9 Fi, Fj随xC的变化关系 (a) Fi随xC的变化关系, d = 5.8 mm; (b)Fj随xC的变化关系, d = 5.8 mm; (c) Fi随xC的变化关系, d = 8.0 mm; (d) Fj随xC的变化关系, d = 8.0 mmFigure9. The curves of Fi and Fj varying with xC: (a) The curves of Fi varying with xC, d = 5.8 mm; (b) the curves of Fj varying with xC, d = 5.8 mm; (c) the curves of Fi varying with xC, d = 8.0 mm; (d) the curves of Fj varying with xC, d = 8.0 mm.
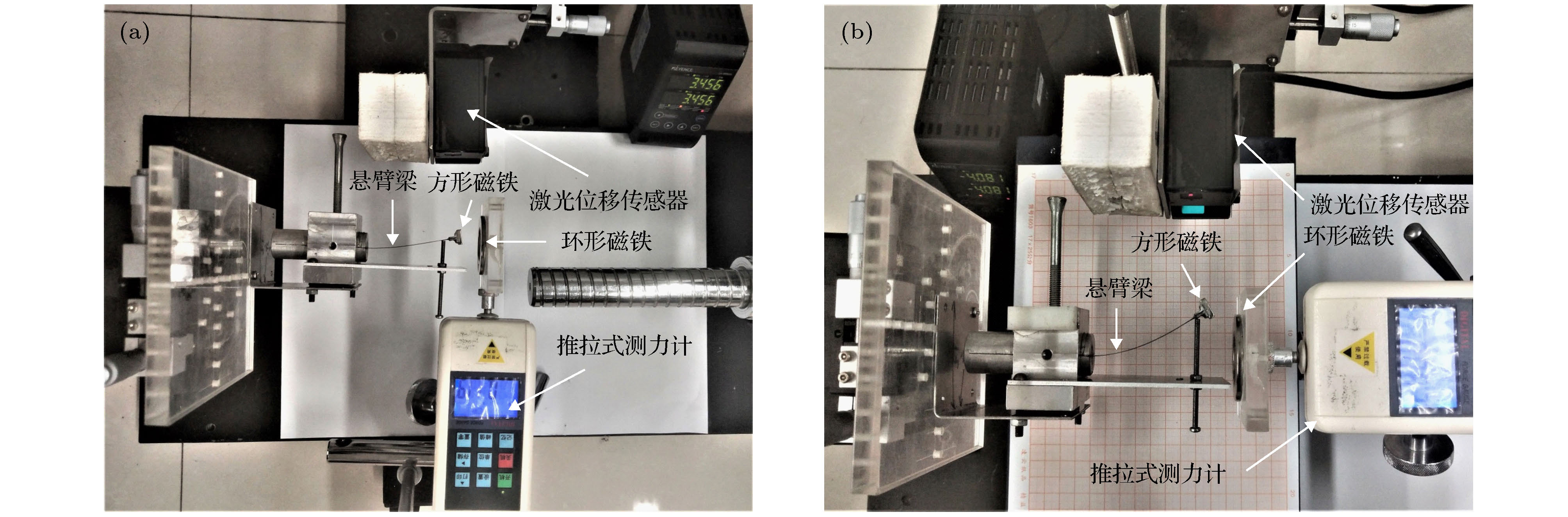 图 10 磁力测量系统 (a) Fi 测量; (b) Fj测量
图 10 磁力测量系统 (a) Fi 测量; (b) Fj测量Figure10. Magnetic force measurement system: (a) The measurement of Fi; (b) the measurement of Fj.



2
4.1.系统势函数随磁铁间距的变化
根据表1, 设置矩形磁铁和环形磁铁的尺寸分别为10 mm × 10 mm × 3 mm和40 mm(φ1) × 20 mm(φ2) × 3 mm, 对(21)式进行数值分析, 得到图11不同磁铁间距d的系统势函数变化图像.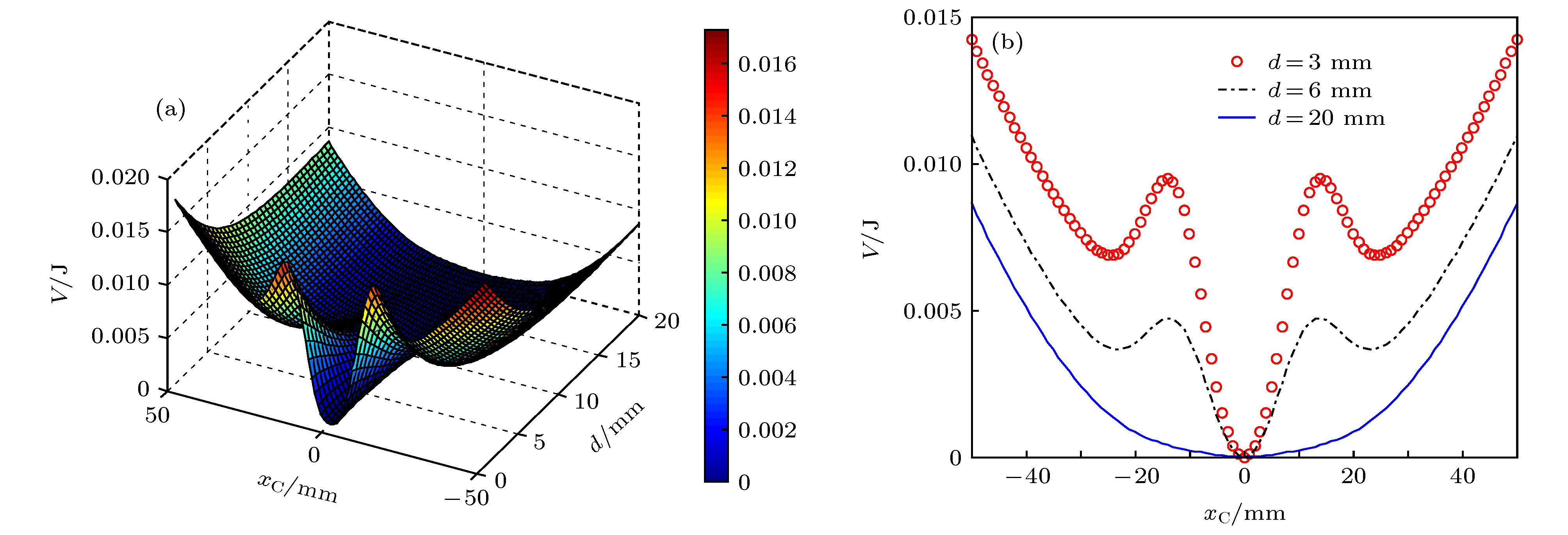 图 11 矩形磁铁(10 mm × 10 mm × 3 mm)与环形磁铁(40 mm (φ1) × 20 mm (φ2) × 3 mm)作用的系统势函数 (a)系统势函数三维图; (b)磁铁间距分别为d = 3 mm, d = 6 mm, d = 20 mm时系统势函数二维图
图 11 矩形磁铁(10 mm × 10 mm × 3 mm)与环形磁铁(40 mm (φ1) × 20 mm (φ2) × 3 mm)作用的系统势函数 (a)系统势函数三维图; (b)磁铁间距分别为d = 3 mm, d = 6 mm, d = 20 mm时系统势函数二维图Figure11. The system potential function varying with d when the size of the rectangular magnet is 10 mm × 10 mm × 3 mm and the ring magnet is 40 mm (φ1) × 20 mm (φ2) × 3 mm: (a) Three dimensional diagram of system potential function; (b) two dimensional diagram of system potential function when d = 3 mm, d = 6 mm and d = 20 mm.
由图11可知, 随着磁铁间距的增大, 系统势函数从三稳状态逐渐变成单稳状态. 当磁铁间距d很小时, 如d = 3 mm, 系统中间势阱较深, 其两侧势阱相对较浅. 当d增大时, 如d = 6 mm, 系统的三个势阱均会变浅. 如果继续增大磁铁间距, 如d = 20 mm, 则系统的三个势阱几乎消失, 系统退化为一个单稳状态.
保持环形磁铁的尺寸不变, 当增大矩形磁铁尺寸时, 系统势函数随磁铁间距d的增大, 会出现由三稳状态或四稳状态先退化为双稳状态再退化为单稳状态的过程. 以20 mm × 20 mm × 3 mm和30 mm × 30 mm × 3 mm的矩形磁铁为例, 作出系统势函数随磁铁间距d的变化图像, 如图12所示. 可以看到, 当矩形磁铁的尺寸为20 mm × 20 mm × 3 mm时, 随着磁铁间距的增大, 系统势函数依次从三稳状态逐渐变成双稳和单稳状态; 当矩形磁铁的尺寸为30 mm × 30 mm × 3 mm, 随着磁铁间距的增大, 系统势函数依次从四稳状态逐渐变成双稳和单稳状态.
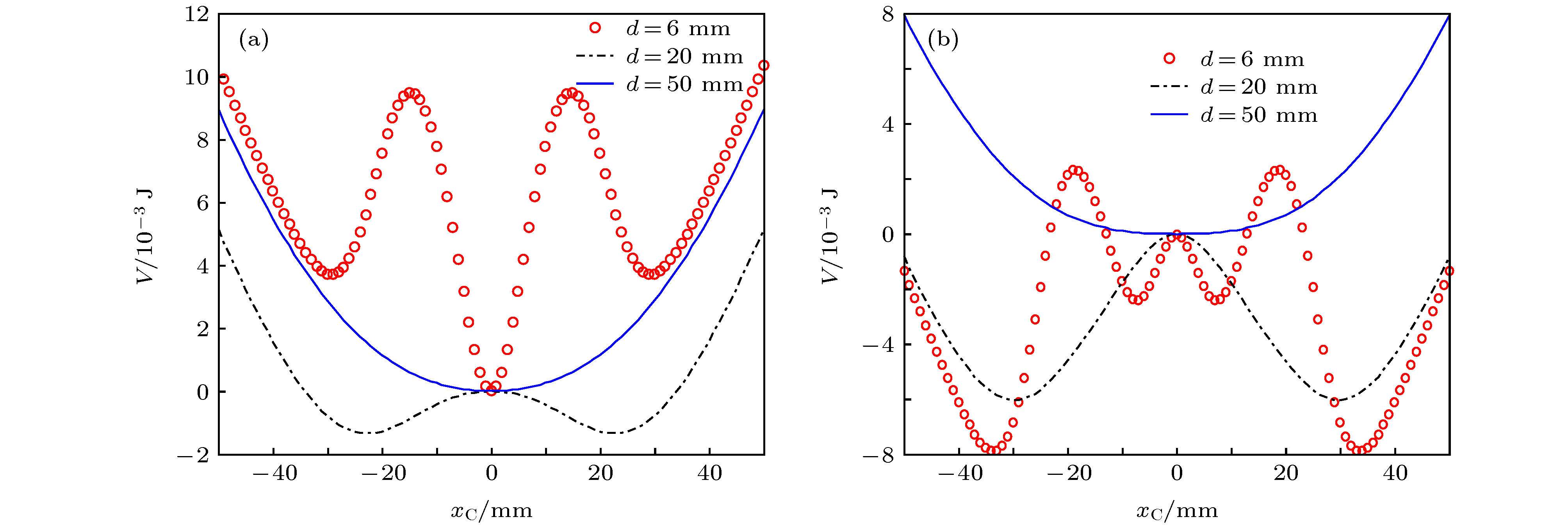 图 12 系统势函数随d的变化 (a)矩形磁铁尺寸为 20 mm × 20 mm × 3 mm; (b) 矩形磁铁尺寸为 30 mm × 30 mm × 3 mm
图 12 系统势函数随d的变化 (a)矩形磁铁尺寸为 20 mm × 20 mm × 3 mm; (b) 矩形磁铁尺寸为 30 mm × 30 mm × 3 mmFigure12. The system potential function varying with d: (a) The size of the rectangular magnet is 20 mm × 20 mm × 3 mm; (b) the size of the rectangular magnet is 30 mm × 30 mm × 3 mm.
2
4.2.系统势函数随磁铁尺寸的变化
取磁铁间距d = 6 mm, 并保持环形磁铁尺寸不变, 令矩形磁铁的长度和宽度相等, 厚度保持3 mm不变, 以矩形磁铁长度lA为变量, 对(21)式进行数值分析, 得到如图13所示的系统势函数变化图像.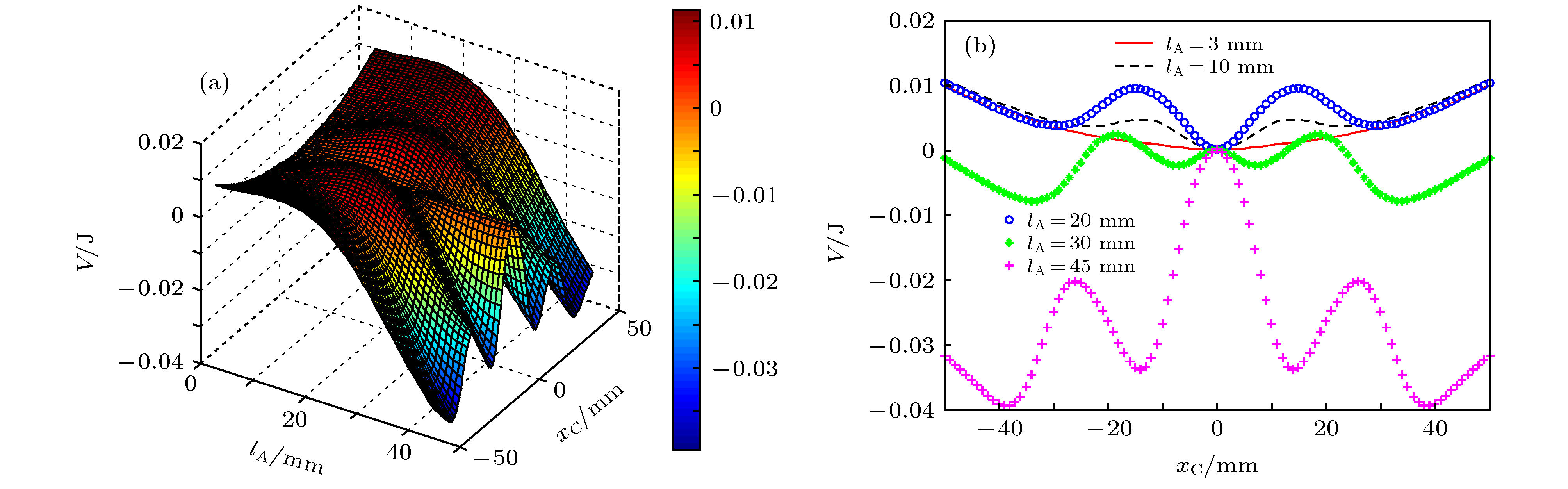 图 13 磁铁间距d = 6 mm, 不同矩形磁铁尺寸与环形磁铁(40 mm(φ1) × 20 mm(φ2) × 3 mm)作用的系统势函数 (a) 系统势函数三维图; (b) 矩形磁铁长度分别为lA = 3 mm, lA = 10 mm, lA = 20 mm, lA = 30 mm, lA = 45 mm时系统势函数二维图
图 13 磁铁间距d = 6 mm, 不同矩形磁铁尺寸与环形磁铁(40 mm(φ1) × 20 mm(φ2) × 3 mm)作用的系统势函数 (a) 系统势函数三维图; (b) 矩形磁铁长度分别为lA = 3 mm, lA = 10 mm, lA = 20 mm, lA = 30 mm, lA = 45 mm时系统势函数二维图Figure13. The system potential function varying with lA when d = 6 mm and the size of the ring magnet is 40 mm(φ1) × 20 mm(φ2) × 3 mm: (a) Three dimensional diagram of system potential function; (b) two dimensional diagram of system potential function when lA = 3 mm, lA = 10 mm, lA = 20 mm, lA = 30 mm and lA = 45 mm.
从图13可以看出, 随着矩形磁铁长度的增大, 系统势函数从单稳状态逐渐变成三稳状态和四稳状态. 当矩形磁铁长度很小时, 如lA = 3 mm, 系统几乎呈现单稳状态. 而当lA增大时, 如lA = 20 mm, 系统会呈现出三个势阱的三稳状态. 如果继续增大lA, 如lA = 30 mm, 则系统会由三稳状态转变为四稳状态.
2
4.3.讨 论
根据(21)式, 系统势函数与弹性恢复力、两磁铁间磁力做功有关, 若不改变悬臂梁本身的结构参数, 那么系统的稳态形式由两磁铁间磁力所决定. 现以三稳、四稳两种稳态形式为例, 解释系统的稳态形式发生变化的原因. 取4.2节中lA = 20 mm和lA = 30 mm两尺寸矩形磁铁, 根据(21)式分别作出两尺寸矩形磁铁的


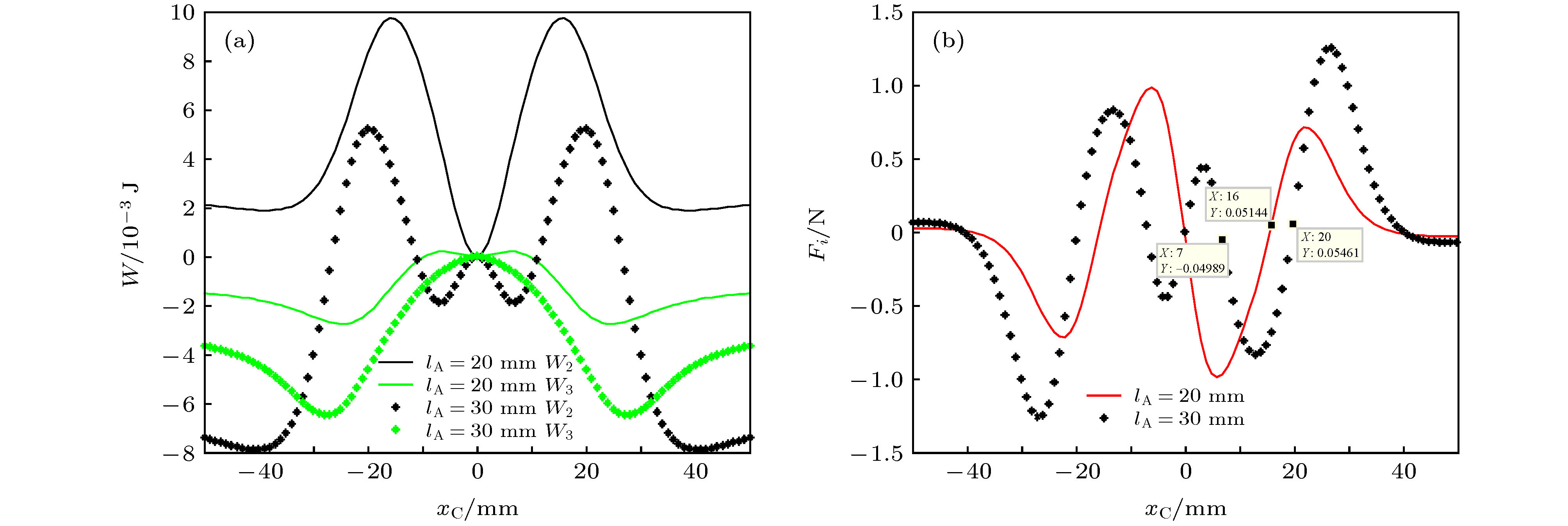 图 14 (a) lA = 20 mm和lA = 30 mm时, W2和W3随xC的变化关系;(b) lA = 20 mm和lA = 30 mm时, Fi随xC的变化
图 14 (a) lA = 20 mm和lA = 30 mm时, W2和W3随xC的变化关系;(b) lA = 20 mm和lA = 30 mm时, Fi随xC的变化Figure14. (a) The curves of W2 and W3 varying with xC when lA = 20 mm and lA = 30 mm; (b) the curves of Fi varying with xC when lA = 20 mm and lA = 30 mm.
从图13(b)和图14(a)可以看出, 系统势函数由三稳状态变为四稳状态, 主要是由于















由此可见, 在弹性恢复力一定时, 系统的稳态形式发生变化是两磁铁间竖直方向上的吸引力、排斥力区间发生变化所造成的.
2
4.4.稳态点个数的验证
为验证上述势函数的分析, 分别从实验和动力学的角度考察系统的稳态特性. 选取表1参数对应的悬臂梁、环形磁铁和矩形磁铁, 构建双磁铁非线性悬臂梁结构, 如图15所示. 调节磁铁间距为d = 6 mm, 可以观察到系统的三稳特性, 这里只给出了3个稳态位置中的中稳态点和上稳态点, 根据对称性可知下稳态点.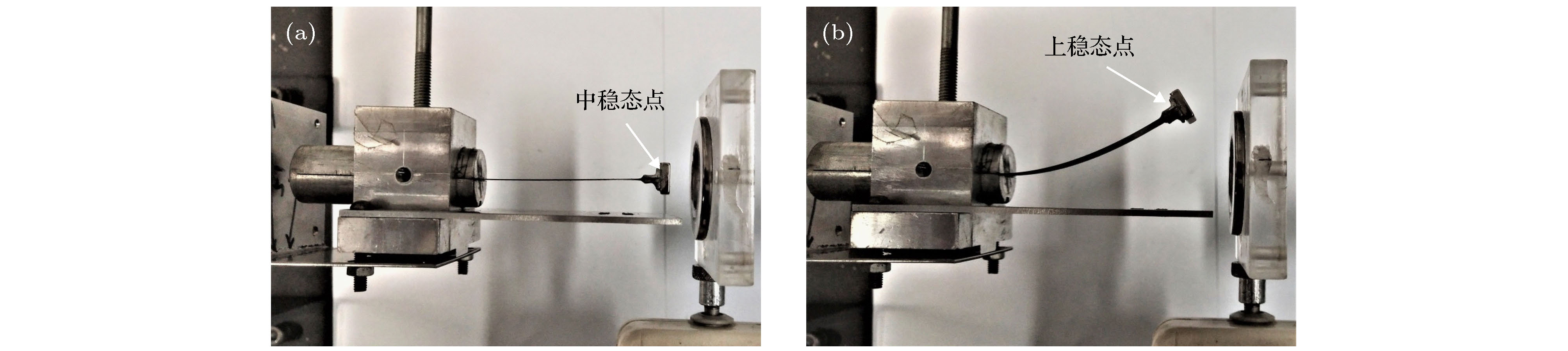 图 15 三稳结构 (a)中稳态点; (b)上稳态点
图 15 三稳结构 (a)中稳态点; (b)上稳态点Figure15. The structure concluding three stable points: (a) The middle state point; (b) the upper stable point.
将图15中10 mm × 10 mm × 3 mm尺寸的矩形磁铁替换为30 mm × 30 mm × 3 mm尺寸的矩形磁铁, 其他参数不变, 可以观察到系统的四稳特性, 这里只显示悬臂梁上半部分的两个稳态位置: 上1稳态点和上2稳态点, 如图16所示. 根据对称性可知悬臂梁下半部分的两个稳态位置.
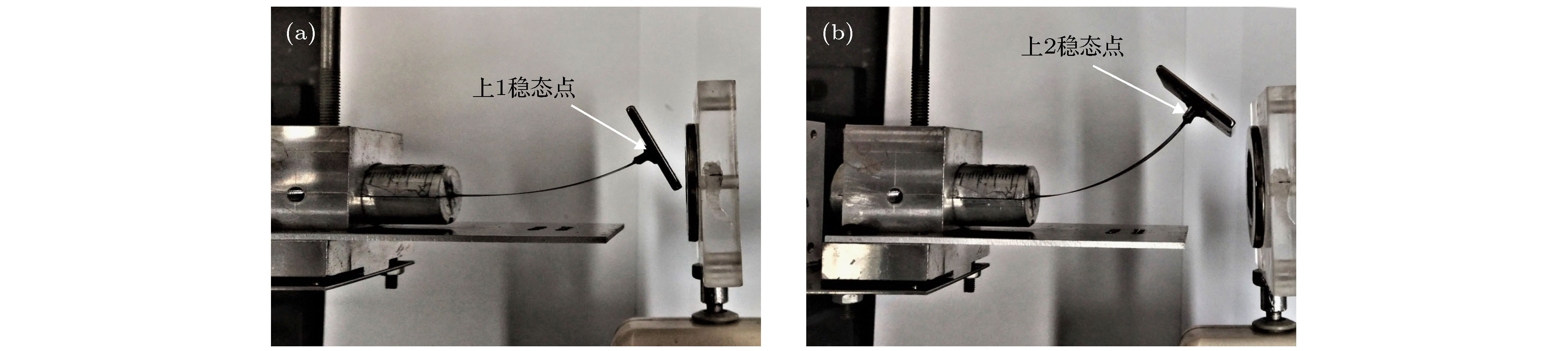 图 16 四稳结构 (a)上1稳态点; (b)上2稳态点
图 16 四稳结构 (a)上1稳态点; (b)上2稳态点Figure16. The structure concluding four stable points: (a) The upper stable point 1; (b) the upper state point 2.
与图13比较可知, 图15和图16的实验结果验证了势函数分析的有效性.
取(1)式中的PA为0—120 Hz的宽带随机激励, 其强度Q由激励的方差表示. 根据表1参数以及(2)式—(8)式, 为较好地展现系统的响应特性, 取机械阻尼比

 图 17 三稳振动响应 (a)时域图; (b)相位图
图 17 三稳振动响应 (a)时域图; (b)相位图Figure17. The vibration response of the tri-stable cantilever beam: (a) The time domain chart; (b) the phase chart.
将图17中的矩形磁铁尺寸替换为30 mm × 30 mm × 3 mm, 调整激励强度为Q = 0.45, 可以得到系统的四稳振动响应的时域波形和相位图, 如图18所示.
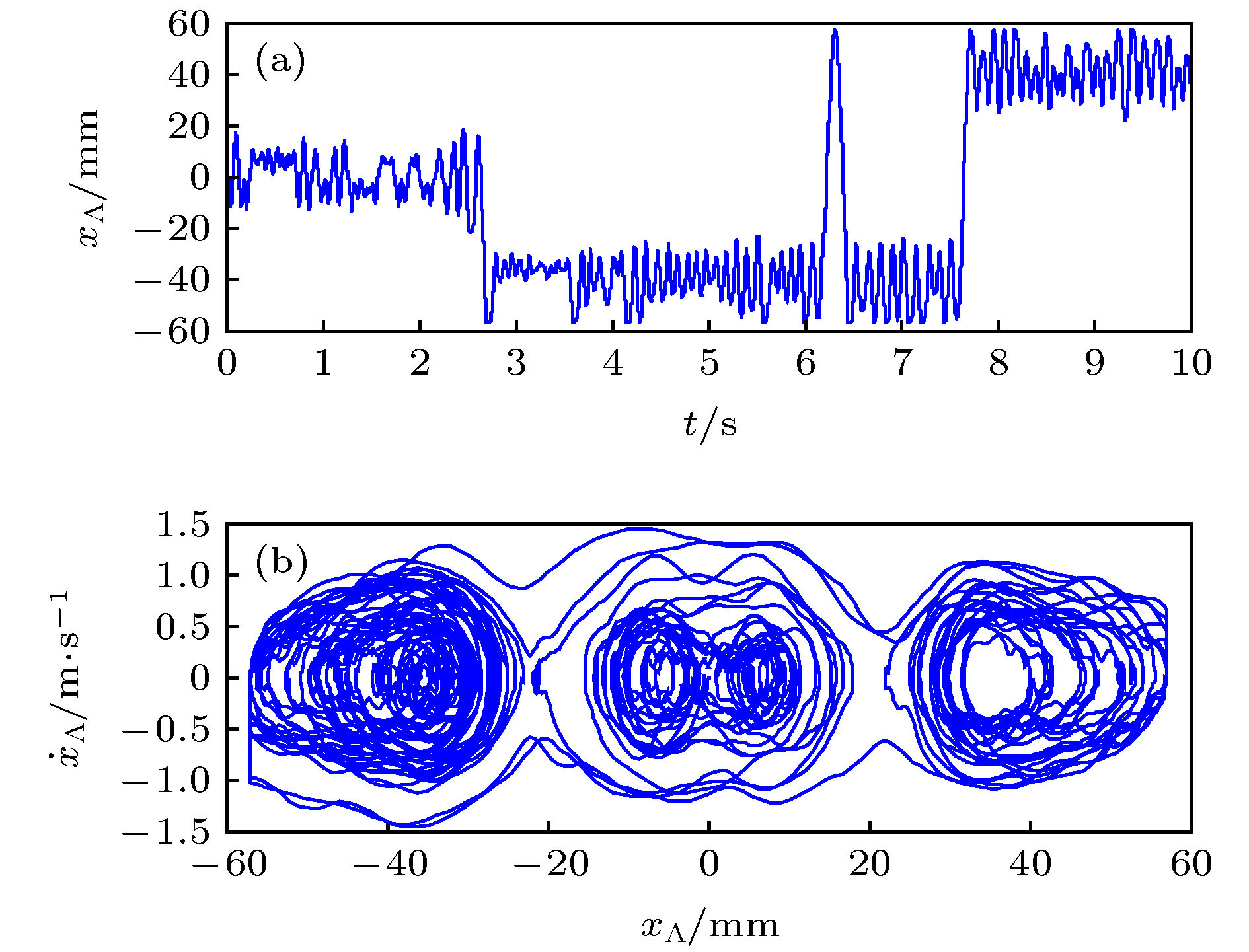 图 18 四稳振动响应 (a)时域图; (b)相位图
图 18 四稳振动响应 (a)时域图; (b)相位图Figure18. The vibration response of the quad-stable cantilever beam: (a) The time domain chart; (b) the phase chart.
从图17和图18的结果可以看出, 动力学仿真得到的稳态点个数与势函数分析得到的稳态点个数相一致.
1) 悬臂梁自由端的矩形磁铁与外部固定的环形磁铁同极相对所构成的双磁铁悬臂梁系统, 可通过改变磁铁尺寸或磁铁间距, 使系统具有单稳、双稳、三稳、四稳特征.
2) 对于一定尺寸的环形磁铁, 选取不同尺寸的矩形磁铁, 系统的势函数随磁铁间距的变化会出现不同稳态的转化方式. 当矩形磁铁尺寸取某一较小值时, 系统势函数会在三稳和单稳状态之间直接转化; 当增大矩形磁铁尺寸至某一值时, 系统势函数会出现三稳-双稳-单稳状态之间的转化现象; 当再增大矩形磁铁尺寸至更大值时, 系统势函数会出现四稳-双稳-单稳状态之间的转化现象.
3) 当环形磁铁的尺寸一定, 且选取一定的磁铁间距时, 矩形磁铁尺寸的变化, 还会引起系统势函数在单稳-三稳-四稳状态之间的转化.
4)系统势函数稳态数目发生转化的原因在于, 悬臂梁自由端运动时, 磁铁尺寸和间距的变化, 导致两磁铁间竖直方向上的吸引力、排斥力区间发生了变化.
