全文HTML
--> --> -->基于LHR的地基探测仪具有体积小、高分辨率、易集成等优点, 已用于多种气体的遥感探测. Sonnabend等[12]利用10 μm铅盐激光器建立的激光外差系统测量了臭氧的大气太阳透过率谱, 反演了臭氧的浓度廓线. Weidmann等[13]建立的0.0073 cm–1高分辨率激光外差系统, 实现了O3的廓线反演. Tsai等[14]建立了一套可调谐外腔量子级联激光外差辐射计, 测量并反演了大气O3, N2O, CH4, H2O等气体的垂直廓线分布信息. 在国内, 王晶晶等[15]搭建了3.53 μm带间级联激光器为本振光源, 实现了CH4及HDO廓线反演, 其分辨率为0.0033 cm–1. 张尚露等[16]利用逐线积分辐射传输模式, 对实测的激光外差透过率谱进行了非线性最小二乘拟合, 实现了整层大气水汽柱浓度的反演.
本文利用建立的参考正向模型筛选出了适合的大气探测窗口, 提出了精准的激光器波长相关校准方法, 基于最优估算法实现了CO2柱浓度和垂直廓线分布的反演, 并对5个月的探测数据与GOSAT数据进行了对比. 此外, 为了评估系统的测量误差, 提出一种新的系统测量误差评估方法, 通过对参考正向模型模拟的透过率谱加载不同幅度的白噪声, 建立了信噪比与测量误差间的近似对应关系.
 图 1 激光外差系统整体技术路线
图 1 激光外差系统整体技术路线Figure1. Overall technical route of laser heterodyne system.
2
2.1.参考正向模型 (RFM)
参考正向模型 (RFM)[17]由英国国家地球观测中心研发, 是一种通用的逐线辐射传输计算模型. 通过对源代码进行编译, 并编辑和调用rfm.drv文件以获得大气透过率谱及雅可比矩阵等结果, 为后期的数据反演提供相应的正向计算数据.利用RFM对整层大气透过率谱进行模拟可以用于选择合适的探测窗口, 其选择依据需满足以下几点: 1) 避免其他气体分子及太阳谱干扰; 2) 合适的谱线强度; 3) 探测波段有可选的激光器及探测器. 首先, 通过查询HITRAN2016数据库[18], 可知CO2在6230—6245 cm–1 (1.601—1.605 μm) 波段具有较强的吸收; 随后利用参考正向模型 (RFM) 模拟了CO2, NH3, H2O, N2O, NO2, O3, CO等7种小分子的大气透射光谱(如图2所示), 通过对比总的模拟谱、单独的大气CO2和H2O模拟谱以及地基FTIR测量结果, 最终选择了位于6238.2—6239.3 cm–1的探测窗口, 并以此为依据选择了相应的激光器和探测器.
 图 2 基于RFM模拟的正向透过率谱及所选探测窗口
图 2 基于RFM模拟的正向透过率谱及所选探测窗口Figure2. Forward transmittance spectrum based on RFM simulation and selected detection window.
2
2.2.数据预处理
2019年3月12日在中国科学院合肥物质科学研究院(31.9°N, 117.166°E)采集的0.0073 cm–1高光谱分辨率近红外激光外差数据如图3所示, 采集模式为逐点扫描方式. 图 3 激光外差实验结果 (a) CO2的高分辨率的外差信号; (b) 实时跟踪的太阳光信号; (c) 激光器的DC信号
图 3 激光外差实验结果 (a) CO2的高分辨率的外差信号; (b) 实时跟踪的太阳光信号; (c) 激光器的DC信号Figure3. Experimental results of the laser heterodyne: (a) The high-resolution heterodyne signal of CO2; (b) the sunlight signal tracked in real time; (c) the DC signal of the laser.
首先, 对如图3(a)所示的CO2外差信号进行背景信号扣除处理, 当电流较低时, 激光器仍未出光(红色椭圆标记的部分), 对其取平均得到外差信号的偏移量, 利用外差信号减去该偏移量实现背景扣除.
其次, 利用扣除背景后的外差信号除以图3(c)所示的DC信号对外差信号进行功率校正, 具体过程为
最后, 借助波长计和HITRAN数据库对外差信号进行波长标定, 并与参考正向模型相同的频率间隔进行插值处理. 需特别指出的是, 由于激光电流的工作模式为逐点扫描模式, 利用波长计 (Bristol, 621B) 能够方便地进行实时的波长标定. 但是, 在实际测量过程中, 激光器的工作波长可能会有轻微的变化(如图4(a)所示). 为了准确识别该波长偏移, 如图4(b)所示, 通过移动真实信号, 计算RFM模型计算的参考信号和实际外差信号的相关系数, 其中移动步长可以用插值方法定义为任意小的长度(如0.0001 cm–1). 最后通过相关系数的最大值位置(如图4(b)所示)可以精确地确定波长偏移, 该方法在信噪比较差的情况下依然适用. 最终获得处理后的LHR频谱 (图7(a)中的黑点)以备下一步的数据反演. 特别指出, 对于太阳光功率波动较大的信号(大于平均太阳光功率的10%), 将不再做进一步的处理.
 图 4 波数偏移校准原理 (a) 参考信号与实验信号之间的波数偏移; (b) 计算波数偏移的过程, 插图为相关系数的结果
图 4 波数偏移校准原理 (a) 参考信号与实验信号之间的波数偏移; (b) 计算波数偏移的过程, 插图为相关系数的结果Figure4. Principle of the wavenumber shift calibration: (a) Wavenumber shift between the reference signal and real signal; (b) the process of calculating the wavenumber shift. The inset shows the result of correlation coefficients.
 图 7 LHR数据反演结果 (a) 实验和拟合LHR谱图以及迭代过程的收敛性 (插图); (b) 残差; (c) 和 (d)分别获取的CO2的先验和反演的垂直浓度分布图
图 7 LHR数据反演结果 (a) 实验和拟合LHR谱图以及迭代过程的收敛性 (插图); (b) 残差; (c) 和 (d)分别获取的CO2的先验和反演的垂直浓度分布图Figure7. Inversion results of LHR data: (a) Experimental and fitted LHR spectrogram and convergence of iterative process (illustration); (b) residue; (c) and (d) obtained prior and inversion vertical concentration profiles of CO2, respectively.
2
2.3.大气参数及状态向量
如图5所示, 数据反演所采用的地表温度、压力数据来自于中国气象数据服务中心(CMCC), 而0.2—55.0 km数据源自于美国气象环境预报中心(NCEP)合肥站的数据(蓝点), 对于55 km以上的数据 (红点) 通过对欧洲中期天气预报中心(ECMWF)的月纬向平均廓线数据插值得到. 对于CO2的先验廓线, 使用了典型的中纬度白天廓线数据. 大气分层采用45层, 从地表到78 km高空, 高度网格依次为0.5, 1.0, 2.0, 4.0和6.0 km. 图 5 (a) 温度和 (b) 压力廓线
图 5 (a) 温度和 (b) 压力廓线Figure5. (a) Temperature and (b) pressure profiles.
2
2.4.迭代反演过程
LHR数据反演的流程图如图6所示, 主要由参考正向模型、测量实验数据预处理和迭代反演等过程组成. 图 6 数据反演流程图 VMR, 体积混合比; ILS, 仪器线形; LM, Levenberg–Marquardt
图 6 数据反演流程图 VMR, 体积混合比; ILS, 仪器线形; LM, Levenberg–MarquardtFigure6. Data inversion flow chart. VMR, volume mixing ratio; ILS, instrument linear; LM, Levenberg–Marquardt.
迭代反演采用Rodgers[19,20]提出的最佳估计方法 (OEM). 对于OEM方法在基于LHR大气探测中的应用, Weidmann等[13]已经做了详细的介绍. 在此仅做简要说明, 测量数据与大气状态向量之间的关系被描述为
OEM算法为最小化损耗函数χ2的迭代运算过程, 其中损耗函数表示为
在反演过程中, 通过LM算法((4)式)迭代调用参考正向模型以最小化损耗函数((3)式), 最终反演出CO2的廓线. 其中, Sε是基于ym测量向量的标准偏差构建的, 协方差矩阵设为对角矩阵, 而Sa依据先验向量的估计误差构建 (表1). 迭代上限设为20次, 收敛条件设为Δχ2/χ2 < 1 × 10–3. 在条件设置合理的反演中, 最终损耗函数χ2应该接近测量向量的维数大小. 图7(a)显示了经过预处理的LHR数据和在6238.2—6239.3 cm–1的光谱区域内的拟合光谱, 其间隔为0.001 cm–1. 迭代过程如图7(a)的插图所示, 经过8次迭代后获得的χ2/m约为1.17. 预处理数据和拟合结果之间的残差如图7(b)所示, 其随机分布表明拟合良好. 通过将反演得到的比例因子乘以先验廓线, 可以计算出反演后CO2廓线如图7(d)所示.
| 状态 向量 | 先验值 | 定义 |
| x (CO2) | 1 | 先验廓线的比例因子 (ECMWF) 45层. |
| a | a0 | 基线中a0、b0和c0的多项式系数由对预处理的LHR信号与模型结果(去除吸收部分后)的比值进行二阶多项式拟合得到. |
| b | b0 | |
| c | c0 |
表1数据反演中使用的状态向量的定义
Table1.Definition of the state vector used in the data retrieval.
利用理想气体状态方程[21] n(h) 以及反演得到的廓线x(h), 则CO2的柱浓度为
图8(a)显示了2019年3月14日的连续测量结果,

 图 8 (a) 2019年3月14日从11:00至13:00的
图 8 (a) 2019年3月14日从11:00至13:00的

Figure8. (a) Retrieval results of the


为了进一步验证系统探测结果, 进行了2019年1月至5月长达5个月的晴天探测, 将实验数据反演结果与温室气体观测卫星GOSAT数据产品进行了比较. 图8(b)显示了该系统



首先, 对正向计算谱叠加不同幅值的白噪声以模拟不同的信噪比, 如图9(a), RFM模型加载0.05幅度的白噪声; 图9(b)为加载5000次幅值为0.05白噪声, 由波段吸收峰波谷位置的变化情况, 获得信噪比计算公式
 图 9 (a) 叠加0.05幅度的白噪声后的透过率谱; (b) 叠加5000次后透过率谱最低点的变化
图 9 (a) 叠加0.05幅度的白噪声后的透过率谱; (b) 叠加5000次后透过率谱最低点的变化Figure9. (a) The transmittance spectrum after adding white noise with the amplitude of 0.05; (b) change range of the lowest point of transmittance spectrum after adding 5000 times.



模拟白噪声从幅度0.001到幅度0.050, 步长为0.001, 获得了SNR,




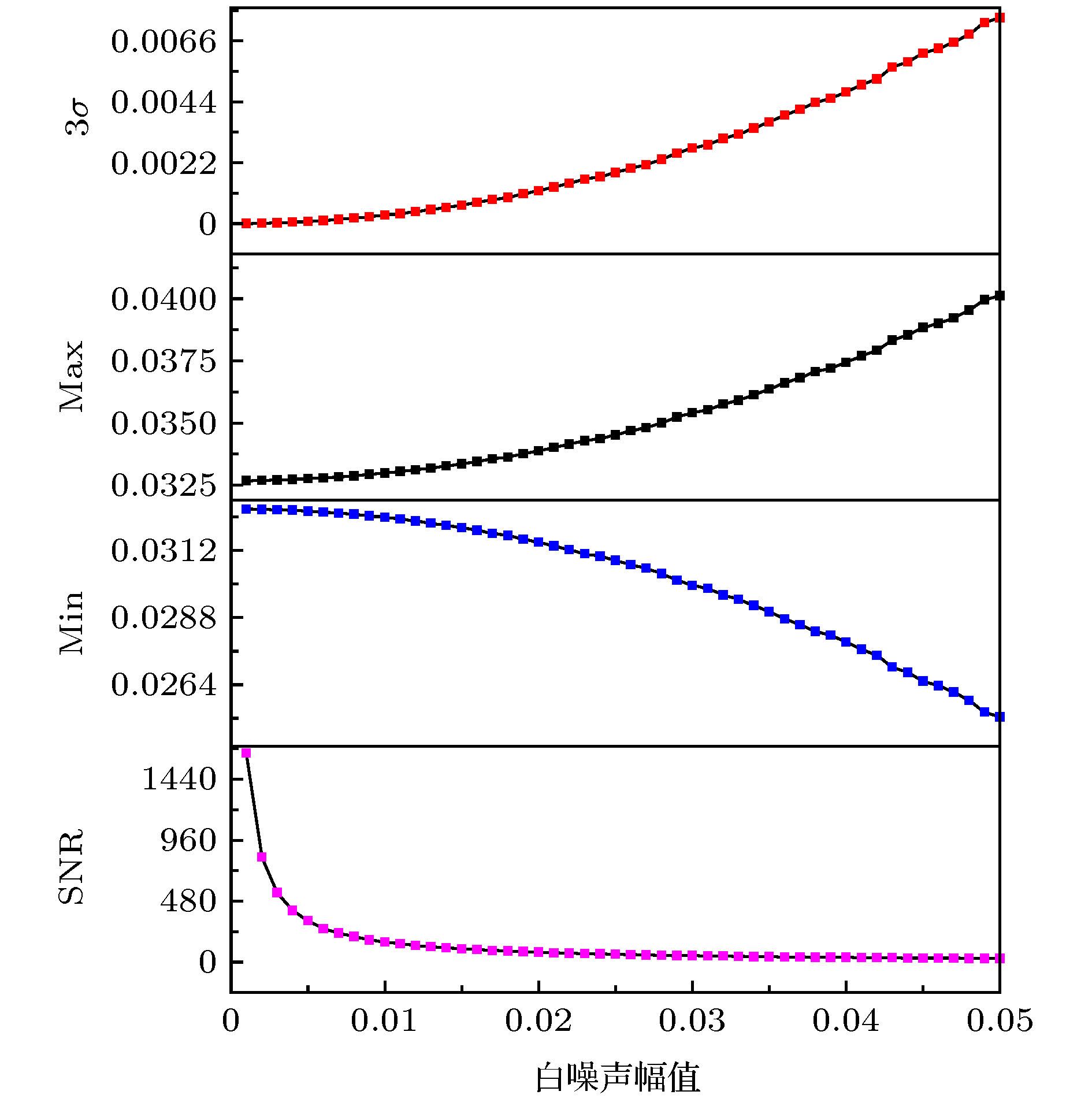 图 10 白噪声幅度0.001变化到幅度0.050引起的
图 10 白噪声幅度0.001变化到幅度0.050引起的
Figure10. Changes of

其次, 通过改变CO2的廓线比例, 透过率谱最低点也随之变化, 相应的柱浓度变化情况如图11(b). 利用图10中的Max插值获得柱总量1, Min插值获得柱总量2, 柱总量2减去柱总量1为柱浓度差值, 即为测量误差.
 图 11 (a) 最小值与廓线变化关系; (b)柱总量变化与最小值关系
图 11 (a) 最小值与廓线变化关系; (b)柱总量变化与最小值关系Figure11. (a) The relationship between the minimum value and the change of profile; (b) the relationship between the change of column total and the minimum.
最终建立近似SNR和柱总量的差值关系, 如图12所示. SNR越大, 测量误差越低. 2019年3月12日探测结果显示, 信噪比为365.55, 通过此模型获得该系统测量误差为0.44 ppm. 需说明的是, 在此仅考虑了信噪比对测量误差的近似评估, 其他影响如激光频率偏差、路径偏差以及仪器函数等的影响并未考虑, 后期将对该问题做进一步研究.
 图 12 SNR与测量误差间的对应关系
图 12 SNR与测量误差间的对应关系Figure12. The relationship between SNR and measurement error.

