摘要: 涡旋是深海环境中频繁出现的海洋现象, 它会引起上层海水的声速扰动, 改变海面风成噪声的传播过程, 最终导致噪声场特性异常. 本文采用高斯涡模型描述涡旋引起的声速扰动, 分别使用射线和抛物方程模型描述近场和远场噪声信号的传播, 研究了涡旋对其水平中心位置不同深度上的风成噪声垂直空间特性(包括噪声垂直方向性和垂直相关性)的影响. 研究表明: 1)在涡心深度上, 涡旋对噪声垂直空间特性的影响最大, 其中冷涡导致噪声垂直方向性中水平凹槽的宽度增加, 凹槽下边缘峰值的高度降低, 噪声垂直相关性减弱, 暖涡的影响反之; 2)在远离涡心的深度上, 涡旋对噪声垂直空间特性的影响减小, 冷涡和暖涡分别仅引起噪声垂直方向性中水平凹槽下边缘峰值的高度升高和降低, 对噪声垂直相关性几乎没有影响; 3)涡旋对噪声垂直空间特性的影响均随其绝对强度增大而增强. 针对以上现象, 使用射线逆推方法分析了涡旋影响噪声垂直空间特性的机理. 该方法由噪声接收点发射声线, 利用声场互易性分析噪声沿声线反向到达接收点的俯仰角和能量大小. 分析表明, 存在涡旋时, 噪声沿海面反射声线反向到达接收点的俯仰角和能量变化, 是引起噪声垂直空间特性变化的主要原因. 此外, 仿真表明, 当接收点偏离涡旋水平中心但两者距离较近时, 研究中的分析和结论仍是近似成立的.
关键词: 涡旋 /
风成噪声 /
垂直方向性 /
垂直相关性 /
射线模型 /
抛物方程模型 English Abstract Effect of mesoscale eddies on the vertical spatial characteristics of wind-generated noise in deep ocean Jiang Guang-Yu 1,2 ,Sun Chao 1,2 ,Li Qin-Ran 1,2 1.School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China Received Date: 09 January 2020Accepted Date: 15 April 2020Available Online: 09 May 2020Published Online: 20 July 2020Abstract: Mesoscale eddy is a marine phenomenon occurring frequently in deep ocean, and it will disturb the sound speed in the upper water layer. As a result, the mesoscale eddies will influence the propagation of wing-generated noise and cause the noise field to vary. In this paper, we investigate the effects of mesoscale eddies on the vertical spatial characteristics (including the noise vertical directionality and the noise vertical correlation) of wind-generated noise at different depths of its horizontal center of the eddy. In the study, the Gaussian eddy model is used to describe the sound speed fluctuation, and the ray and parabolic equation theories are used to describe the noise propagating in the near field and far field, respectively. Simulations indicate as follows. 1) At the depth of the eddy center, a clod-core eddy causes both the width of the horizontal notch and the noise vertical correlation to decrease, while the effect of a warm-core eddy is contrary to that of the cold-core eddy. 2) At the depth far from the eddy center, the effect of eddies is reduced, a cold-core and a warm-core eddy only lead the peak at the down edge of the horizontal notch in the noise directionality to rise and fall, respectively, and do not influence the noise vertical correlation. 3) The effect of an eddy becomes severe as its absolute strength becomes higher. The ray reversion method based on the principle of reciprocity is used to explain the physical reason behind the above phenomena. By the method the rays are launched from the noise receiving point and the polar angle and the strength of the noise arriving reversely along the ray paths are analyzed. It is shown that the change of the polar angle and the strength of the noise arriving reversely along the surface reflected ray paths in the presence of eddies are the main cause for changing the noise vertical spatial characteristics. Furthermore, simulations show that the analyses and conclusions in the study are still approximately valid when the receiving point deviates from the eddy center but the horizontal distance between them is short.Keywords: eddy /wind-generated noise /vertical directionality /vertical correlation /ray model /parabolic equation model 全文HTML --> --> --> 1.引 言 风成噪声是由海面风浪和气泡等引起的水下噪声[1 ] , 能量覆盖200 Hz—50 kHz, 在500—2500 Hz内是海洋环境噪声的主导成分[2 ] . 风成噪声的垂直空间的特性包括噪声垂直方向性和噪声垂直相关性, 其重要性主要体现在两个方面. 1)噪声垂直空间特性是影响垂直阵探测性能的关键因素. 已有研究表明, 某些环境下噪声垂直方向性中存在一个水平凹槽[3 ,4 ] , 当信号来波落入水平凹槽中时, 垂直阵的接收信噪比较高, 探测性能可能获得一定的提升[5 ] . 噪声垂直相关性则决定了垂直阵上噪声协方差矩阵的特征值和秩, 直接影响波束形成(特别是自适应波束形成)的性能[6 ] ; 2)噪声垂直空间特性中包含许多环境和声场信息. 例如, 噪声垂直方向性中海底和海面方向上噪声强度的比值$ B_{\rm{down}}/B_{\rm{up}} $ 可用于估计海底底质参数[7 ,8 ] , 噪声垂直相关性可用于提取声场Green函数[9 -11 ] 等.[12 ] . 模型中一般认为风成噪声源是均匀分布于海面上的偶极子声源[13 ] 或海面以下某一无限大平面上的单极子声源[14 ] , 两种噪声源分布模式是等价的[15 ] . 在此基础上, Cron和Sherman[13 ] 以球面波模型描述噪声的传播, 给出的噪声垂直相关性仅与水听器间距有关, 而与深度无关; 之后Yang和Yoo[3 ] 以及Kuperman和Ingenito[14 ] 将简正波模型用于噪声场建模中, 分别给出了一般水平分层环境下的噪声垂直方向性和噪声垂直相关性; Harrison[16 ] 建立了基于射线模型的噪声场模型CANARY, 可同时计算噪声垂直方向性和噪声垂直相关性; 再然后Carey等[17 ] 和Perkins等[18 ] 分别使用抛物方程模型和$ {{N}} \times {\rm{2 D}}$ 模型描述噪声的传播, 将噪声场模型扩展到了距离有关和三维环境.[3 ,4 ,14 ,19 ] 、海底底质[3 ,19 ,20 ] 、海底地形度[17 ,21 ] 和声吸收损失[22 ] 等环境参数对风成噪声垂直空间特性的影响. 其中, 声速剖面受到日照、季节、纬度等多种因素的影响[23 ] , 相比其他环境参数更加复杂多变, 因此其影响广受关注. 研究表明, 浅海中夏季表面混合层内声速较大, 混合层以下声速呈负梯度分布, 此时噪声垂直方向性中存在明显的水平凹槽; 冬季正梯度声速分布则会导致水平凹槽变浅, 甚至消失[3 ,19 ] ; 同时声速剖面的变化还将导致噪声垂直相关性的振荡幅度和频率改变[14 ] . 深海中表面声道的存在将导致表面声道内来自水平方向的噪声增强[24 ] ; 表面声道以下来自海底方向的噪声强度升高, 噪声垂直相关性发生偏移[4 ] .[25 ] 以及江鹏飞等[26 ] 指出线性内波和孤子内波分别使噪声垂直方向性中的水平凹槽变浅和加深. 深海中, 涡旋相比内波和锋面对声速的扰动更强, 空间和时间尺度也更大[27 ] . 国内外多项研究表明涡旋可引起会聚区位置和宽度变化, 声波到达角偏移等等[28 -37 ] . 鉴于涡旋对声传播的影响, 冷涡内部是潜艇良好的隐蔽场所[12 ] . 涡旋同样会改变海面风成噪声的传播特性, 进一步引起噪声垂直空间特性变化, 对涡旋内的垂直阵探测和信息提取造成一定影响. 然而, 有关涡旋对风成噪声垂直空间特性的影响仍缺少相应的研究.[38 ] 模拟涡旋引起的声速扰动, 考虑到存在涡旋时声速分布随距离变化, 分别使用射线和抛物方程模型[39 ] 描述近场和远场噪声的传播过程. 结果表明涡旋对涡心深度上的噪声垂直空间特性影响最大, 冷涡和暖涡分别使噪声垂直方向性中的水平凹槽变宽和变窄, 噪声垂直相关性增强和减弱. 针对以上现象, 使用射线逆推分析方法解释了其物理机理, 即存在涡旋时噪声垂直空间特性的变化主要是由噪声沿海面反射声线反向到达接收点的俯仰角和能量变化引起的. 虽然研究中假设接收点位于涡旋的水平中心位置, 但是仿真分析表明, 当接收点位于涡旋水平中心附近时, 文中的分析和结论仍是近似成立的. 本文的分析和结论为涡旋内垂直阵探测和信息提取提供了有益的参考. 举例来说, 在使用垂直阵进行探测时可刻意将阵列布放于冷涡涡心附近或避免将阵列布放于暖涡涡心附近, 使接收点处具有较宽的噪声水平凹槽, 相应地, 垂直阵可获得较大的高信噪比探测范围, 为提高探测性能创造有利条件.2.理论与模型 22.1.深海涡旋模型 2.1.深海涡旋模型 本文采用高斯涡(Gaussian eddy, GE)模型[38 ] 描述涡旋, 图1 给出了模型示意图. 在过涡心的距离-深度(r -z )坐标平面内, 涡旋的范围是一个水平半径为$ D_{r} $ , 垂直半径为$ D_{ z} $ , 涡心坐标为$ (R_{\rm e}, Z_{\rm e}) $ 的椭圆; 在三维坐标内, 涡旋的范围是一个关于涡心轴旋转对称的椭球. 在过涡心的r -z 坐标平面内, 声速分布的表达式为图 1 高斯涡模型示意图Figure1. Gaussian eddy model$ c_0(z) $ 为无涡旋扰动下的声速分布, $ \Delta c(r, z) $ 为涡旋引起的声速扰动. 假设无涡旋扰动时, 声速剖面为Munk曲线[40 ] , 则$ c_0(z) $ 的表达式为$ \epsilon = 0.00737 $ , $\tilde z = {2(z-z_{\rm{sa}})}/{z_{\rm{sa}}}$ , $ z_{\rm{sa}} $ 为声道轴深度. GE模型中, $ \Delta c(r, z) $ 的表达式为$ D_{\rm c} $ 为涡旋强度, 即存在涡旋时从涡心到涡外沿的最大声速差, 冷涡和暖涡情况下, $ D_{\rm c} $ 分别取负值和正值. $ \left| D_{\rm c} \right| $ 描述了涡旋造成的声速扰动的大小, 本文中称$ \left| D_{\rm c} \right| $ 为绝对涡旋强度.2.2.声传播理论 -->2.2.声传播理论 由2.1 节可知, 涡旋扰动下的声速剖面随距离变化. 目前, 适用于距离相关环境的声场计算模型主要有射线和抛物方程模型. 其中, 射线模型的声辐射开角可覆盖$ 0 ^\circ — 180 ^\circ $ , 在满足高频近似的条件下(即波长远小于计算环境中的任一空间尺度, 该条件在深海环境下较容易满足)可精确给出近场和远场计算结果, 但其缺陷在于计算效率低下且焦散线处的声强计算结果偏大; 相比之下, 抛物方程模型在计算效率方面有明显优势, 但声辐射开角无法完全覆盖$ 0 ^\circ — 180 ^\circ $ , 在近场的计算精度较低. 本文分别使用射线和抛物方程模型计算近场(20 km以内)和远场(20 km以外)声场传递函数, 以兼顾计算精度和效率. 在使用射线模型计算近场传递函数时, 焦散线仅出现一次, 对后续噪声场的计算精度影响很小.r 和z 分别表示距离和深度, K 为声源到接收点的本征声线数, $ {\rm i} = \sqrt{-1} $ 为虚数单位, $ \omega $ 为角频率, $ \tau_j $ 和$ A_j $ 分别为第j 条本征声线的时延和幅度, 可通过求解以下程函方程和传输方程获得[41 ] , 该模型在焦散线处的计算误差相对较小.$ \sqrt{1+q} $ 进行近似展开, 其中$ k_0 = \omega / c_0 $ 为参考波数, $ n = c_0/c $ 为折射率, $ c_0 $ 为参考声速, c 为声速. 不同的近似展开方式即对应于不同的抛物方程模型. 本文选用的抛物方程模型为RAM (range-dependent acoustic model)[42 ] , 该模型对$ \sqrt{1+q} $ 进行Padé 展开, 然后利用分裂-步进算法求解波动方程[43 ,44 ] . Padé级数展开的表达式为m 为展开的项数, 且2.3.噪声场模型 -->2.3.噪声场模型 32.3.1.几何模型 -->2.3.1.几何模型 噪声场建模中采用柱面坐标系, 图2 给出了模型的几何结构. 采用K/I模型中[14 ] 噪声源的几何分布, 即无限多单极子噪声源均匀分布于海面以下某一无限大平面上, 噪声源深度$ z_{\rm{ns}} < \lambda/4 $ ($ \lambda $ 为波长), 且各噪声源之间互不相关. 本文关注涡旋对其中心不同深度上的噪声垂直空间特性的影响, 因此接收点位于涡心轴上, 且涡心轴与z 轴重合. 由图2 可知, 噪声源分布和海洋环境均与方位角$ \varphi $ 无关.图 2 噪声场模型几何示意图Figure2. Geometry of the noise model图2 中半径为r , 宽度为$ {\rm d}r $ 的圆环, 当$ {\rm d}r $ 较小时可近似认为该圆环内所有噪声源到深度为z 的接收点的声场传递函数均为$ G(z, r, z_{\rm{ns}}) $ , 则圆环内所有噪声源在该点产生的声压为$ N(r) $ 为圆环内的噪声源个数, $ q_j $ 为单个噪声源激发的随机声压振幅, $ Q(r) $ 为圆环内所有噪声源叠加后产生的振幅, $ \phi_j $ 为单个噪声源的随机相位, $ \phi(r) $ 为圆环内所有噪声源叠加后产生的随机相位. 假定单位面积内的噪声源强度为$ S(r) $ (单位为${\rm{dB}},\;{\rm{re}}\;{\rm{1}}\;\text{μ} {\rm{P}}{{\rm{a}}^{\rm{2}}}/{{\rm{m}}^{\rm{2}}}$ ), 则(9 )式可改写为z 的接收点处的声压为所有圆环内的噪声源在该点产生的声压之和, 即10 )式和(11 )式是计算噪声垂直方向性和噪声垂直相关性的基础.2.3.2.噪声垂直方向性 -->2.3.2.噪声垂直方向性 噪声的垂直方向性描述了垂直面内各方向上的能量分布, 某一俯仰角$ \theta $ 上的噪声能量可视为垂直阵在该方向上的常规波束形成响应. 假设垂直阵中各阵元的深度为$ z_j, j = 1, 2, \cdots, L $ , 阵列流形向量为$ \left[ 1 \ {\rm e}^{{\rm -i}kz_1\cos\theta} \ \cdots \ \ {\rm e}^{{\rm -i}kz_L\cos\theta} \right]^{\rm T} $ . 则对于某一圆环内的噪声源所产生的噪声场, 垂直阵的常规波数形成响应为$ \theta $ 为俯仰角, $0 ^\circ$ 和$180 ^\circ$ 分别表示海面和海底方向, 波数$ k = \omega/c $ , $ \left < \cdot \right > $ 表示几何平均. 将(10 )式代入(12 )式, 有14 )式通过数值计算得到. 计算中取$ {\rm d}r $ = 10 m, 距离积分范围为$ 0 —200 \ {\rm{km}} $ , 200 km以外噪声源的能量贡献很小, 可以忽略不计.2.3.3.噪声垂直相关性 -->2.3.3.噪声垂直相关性 噪声的垂直相关性描述了垂直方向上两个接收点处噪声的相关程度, 定义为归一化后两点的噪声互谱密度. 对于深度为$ z_1 $ 和$ z_2 $ 的两个接收点, 噪声互谱密度为$ d = \left| z_1-z_2 \right| $ , 并做变量代换$ z = z_1 $ , $ \varGamma(z_1, z_2) $ 可改写为$ \varGamma(z, d) $ . 下文中称$ \varGamma(z, d) $ 为深度z 上的噪声垂直相关函数$ \varGamma(d) $ .[45 ] 指出, 噪声相关函数可以用噪声方向性表示. 在如图2 所示的环境中, 噪声源分布和海洋环境均与方位角$ \varphi $ 无关. 因此, 在水平方向上, 噪声是各向同性的. 在这种情况下, 噪声垂直相关函数$ \varGamma(d) $ 可以用噪声垂直方向性$ B(\theta) $ 表示, 即$ B_0(\theta) $ 为归一化的噪声垂直方向性, 满足17 )式和(18 )式将用于计算噪声垂直空间相关性, 并解释涡旋引起噪声垂直相关性变化的原因.3.仿真实验 在第2 节的基础上, 本节将仿真分析不同强度的冷涡和暖涡对噪声垂直空间特性的影响. 仿真中, 设定噪声频率为500 Hz, 噪声源深度为0.5 m. Bellhop的射线出射角取$0 ^\circ — 180 ^\circ$ , 使用Bounce[46 ] 计算海底反射损失作为计算输入, 等效模拟海底的作用. RAM中取Padé展开的项数$ m = 10 $ , 深度和距离计算步长分别取0.5和5.0 m, 此时声能量辐射开角约为$14 ^\circ — 166 ^\circ$ . 此外, 仿真中利用声场互易性减少计算量[47 ] .3.1.仿真环境 3.1.仿真环境 图3 给出了本文的仿真环境. 垂直深度上, 海洋环境分为三层, 0—4000 m为海水, 4000—4500 m为沉积层, 4500 m以下为海底半空间. 无涡旋扰动时, 声速剖面为Munk曲线, 声道轴深度为1000 m, 临界深度为3690 m. 存在涡旋时, 除声速以外其他参数保持不变. 涡旋中心位置为(R e = 0 m, Z e = 800 m), 垂直和水平半径分别为$ D_{z} = 400 \ {\rm m} $ 和$ D_{r} = 120 \ {\rm{km}} $ . 涡旋强度$ D_{\rm c} $ 分别取$ -40 $ , $ -20 $ , 0, 20和40, 其中$ D_{\rm c} = 0 $ 即表示不存在涡旋. 单位面积上的噪声源强度设定为$ S(r) = 0\;{\rm{dB}}\;({\rm{re}}\;{\rm{1}}\;\text{μ} {\rm{P}}{{\rm{a}}^{\rm{2}}}{\rm{/}}{{\rm{m}}^{\rm{2}}})$ . 如无特殊说明, 下文中保持各项仿真参数不变.图 3 仿真环境Figure3. Simulation environment图4 给出了涡旋强度$ D_{\rm c} $ 取不同值时, 0—200 km处的声速剖面, 相邻两声速剖面间的距离间隔为20 km. 可以看出, 冷涡中心的声速小于边缘的声速, 暖涡中心的声速大于边缘的声速, 距离涡心越远, 涡旋对声速分布的影响越小. 另外, 涡旋对声速分布的影响随其绝对强度$ \left| D_{\rm c} \right| $ 的增大而增强.图 4 涡旋强度$ D_{\rm c} $ 不同值时的声速分布 (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-20 $ ; (c) $ D_{\rm c}=-40 $ ; (d) $ D_{\rm c}=20 $ ; (e) $ D_{\rm c}=40 $ Figure4. Sound speed distribution with different $ D_{\rm c} $ : (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-20 $ ; (c) $ D_{\rm c}=-40 $ ; (d) $ D_{\rm c}=20 $ ; (e) $ D_{\rm c}=40 $ 3.2.涡旋对噪声垂直方向性的影响 -->3.2.涡旋对噪声垂直方向性的影响 仿真中噪声垂直方向性由阵元数$ L = 21 $ , 阵元间距$ \Delta z = 1 $ m的垂直阵通过常规波束形成计算得到. 将垂直阵中心分别置于$ z = 100, \ 200, \ \cdots, $ 3900 m, 设定波束扫描的角度间隔为$ 1 ^\circ $ , 由(14 )式计算得到涡旋强度$ D_{\rm c} $ 取不同值时, 各深度上的噪声垂直方向性$ B(\theta) $ , 如图5 所示.图 5 涡旋强度$ D_{\rm c} $ 取不同值时, 不同深度上的噪声垂直方向性 (图中黑色虚线指示了水平凹槽下边缘峰值) (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-20 $ ; (c) $ D_{\rm c}=-40 $ ; (d) $ D_{\rm c}=20 $ ; (e) $ D_{\rm c}=40 $ Figure5. Noise vertical directionalities at different depths with different $ D_{\rm c} $ (black dashed line in each subfigure indicates the location of the peak at the downward edge of the horizontal notch): (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-20 $ ; (c) $ D_{\rm c}=-40 $ ; (d) $ D_{\rm c}=20 $ ; (e) $ D_{\rm c}=40 $ 图5(a) 可以看出, 无涡旋时$ B(\theta) $ 具有以下特征: 1)在临界深度以上, $ B(\theta) $ 在$ 90 ^\circ $ 方向上始终存在一个水平凹槽, 且凹槽宽度在声道轴深度上最大, 随着接收深度远离声道轴, 凹槽宽度逐渐减小; 2)$ B(\theta) $ 在水平凹槽的下边缘(靠近海底方向的边缘)始终存在一个峰值, 如黑色虚线所示; 3)由于海底沉积层较厚, 海底反射损失较大, 来自海底的噪声能量明显弱于来自海面方向的噪声能量. 对比图5(a) 和图5(b) —图5(e) 可以看出, 涡旋对$ B(\theta) $ 的影响主要有: 1)冷涡使水平凹槽的宽度增大, 而暖涡使水平凹槽的宽度减小; 2)涡旋对其中心深度上的$ B(\theta) $ 影响最大, 接收深度距离涡心越远, 涡旋对$ B(\theta) $ 的影响越小; 3)涡旋对$ B(\theta) $ 的影响随其绝对强度$ \left| D_{\rm c} \right| $ 的增大而增强.图6(a) 和(b) 进一步给出了涡心深度(800 m)和远离涡心深度(2000 m)上, 涡旋强度$ D_{\rm c} $ 取不同值时的噪声垂直方向性$ B(\theta) $ . 为定量分析$ B(\theta) $ 中水平凹槽的宽度变化, 下文中以凹槽下边缘峰值所在的角度作为其下边界, 并利用凹槽的水平对称性计算其宽度. 图6(a) 中, $ D_{\rm c} $ 取$ -40 $ , $ -20 $ , 0, 20和40时, 凹槽下边缘峰值所在的角度分别为$110 ^\circ$ , $108 ^\circ$ , $105 ^\circ$ , $102 ^\circ$ 和$97 ^\circ$ , 则凹槽宽度分别为$ 40 ^\circ $ , $ 36 ^\circ $ , $ 30 ^\circ $ , $ 22 ^\circ $ 和$ 14 ^\circ $ . 可以看出, 凹槽宽度随$ D_{\rm c} $ 增加而减小, 即冷涡和暖涡分别使凹槽宽度增大和减小, 且涡旋的绝对强度越大凹槽宽度的变化越大. 此外, 凹槽下边缘峰值的高度随$ D_{\rm c} $ 的增加而升高, 即冷涡和暖涡分别使该峰值的高度降低和升高, 且涡旋的绝对强度越大该峰值的高度变化越大. 相比之下, 图6(b) 中噪声垂直方向性的变化较小, $ D_{\rm c} $ 取5个不同值时, 水平凹槽下边缘峰值所在的角度均为$ 103 ^\circ $ , 即凹槽宽度始终为$ 26 ^\circ $ . 但是, 凹槽下边缘峰值的高度随$ D_{\rm c} $ 的增加而降低, 换言之, 冷涡和热涡分别引起该峰值的高度升高和降低, 且峰值高度的变化量随涡旋绝对强度的增加而增大.图 6 800和2000 m深度上, 涡旋强度$ D_{\rm c} $ 取不同值时的噪声垂直方向性 (a) 800 m; (b) 2000 mFigure6. Noise vertical directionalities with different $ D_{\rm c} $ at 800 and 2000 m depths: (a) 800 m; (b) 2000 m3.3.涡旋对噪声垂直相关性的影响 -->3.3.涡旋对噪声垂直相关性的影响 在获得噪声垂直方向性$ B(\theta) $ 后, 利用(17 )式和(18 )式即可获得噪声垂直相关函数$ \varGamma(d) $ . 作为对比, 图7 和图8 分别给出了涡心深度(800 m)和远离涡心深度(2000 m)上, $ D_{\rm c} $ 取不同值时的$ \varGamma(d) $ . 其中, 图7(a) 和8(a) 给出了$ \varGamma(d) $ 的实部$ {\rm{Re}}\left[ \varGamma(d) \right] $ , 图7(b) 和图8(b) 给出了$ \varGamma(d) $ 的虚部$ {\rm{Im}}\left[ \varGamma(d) \right] $ . $ {\rm{Re}}\left[ \varGamma(d) \right] $ 和$ {\rm{Im}}\left[ \varGamma(d) \right] $ 分别来自于对称噪声和非对称噪声成分[11 ] , 且分别为偶函数和奇函数.图 7 800 m深度上, 涡旋强度$ D_{\rm c} $ 取不同值时的噪声垂直相关函数 (a) $ {\rm Re}\left[ \varGamma(d) \right] $ ; (b) $ {\rm{Im}}\left[ \varGamma(d) \right] $ Figure7. Noise vertical correlation functions with different $ D_{\rm c} $ at 800 m depth: (a) $ {\rm Re}\left[ \varGamma(d) \right] $ ; (b) $ {\rm{Im}}\left[ \varGamma(d) \right] $ 图 8 2000 m深度上, 涡旋强度$ D_{\rm c} $ 取不同值时的噪声垂直相关函数 (a) $ {\rm Re}\left[ \varGamma(d) \right] $ ; (b) $ {\rm{Im}}\left[ \varGamma(d) \right] $ Figure8. Noise vertical correlation functions with different $ D_{\rm c} $ at 2000 m depth: (a) $ {\rm Re}\left[ \varGamma(d) \right] $ ; (b) $ {\rm{Im}}\left[ \varGamma(d) \right] $ 图7 和图8 中, $ {\rm{Re}}\left[ \varGamma(d) \right] $ 和$ {\rm{Im}}\left[ \varGamma(d) \right] $ 的幅值均随着d 增加振荡减小, 表明噪声垂直相关性随着d 的增加振荡衰减. 作为对比, 图7 中可见 $ {\rm{Re}}\left[ \varGamma(d) \right] $ 和$ {\rm{Im}}\left[ \varGamma(d) \right] $ 振荡的包络随着$ D_{\rm c} $ 的增加而减小. 该现象说明, 在涡心深度上, 噪声垂直相关性随着$ D_{\rm c} $ 的增加而减小, 即冷涡和暖涡分别使噪声垂直相关性增强和减弱, 且涡旋的绝对强度越大噪声垂直相关性的变化越剧烈. 然而, 图8 中, 有无涡旋时的$ {\rm{Re}}\left[ \varGamma(d) \right] $ 和$ {\rm{Im}}\left[ \varGamma(d) \right] $ 几乎未发生变化. 因此, 在远离涡心的深度上, 噪声垂直相关性几乎不受涡旋的影响.4.机理分析 由上文分析可知, 涡旋对涡心和远离涡心深度上噪声垂直空间特性的影响是不同的. 本节将使用射线逆推的方法, 分别讨论涡心和远离涡心深度上, 涡旋引起噪声垂直空间特性的变化的机理. 由于$ D_{\rm c} $ 取$ -40 $ 和40时, 涡旋对噪声垂直空间特性的影响更加明显, 本节的讨论均以这两个取值为例.4.1.涡心深度上噪声特性变化的机理 4.1.涡心深度上噪声特性变化的机理 首先, 对涡心深度上噪声垂直方向性中水平凹槽宽度变化的原因进行分析. 由3.2 节可知, 水平凹槽宽度的变化等价于凹槽上下边界的变化. 由于水平凹槽的上下边界关于水平方向对称, 两者的变化机理类似, 本文仅对凹槽下界(即凹槽下边缘峰值所在角度)变化的机理进行讨论, 对凹槽上界变化的机理不再赘述.图9 给出了$ D_{\rm c} $ 取0, $ -40 $ 和40时, 以(0, 800 m)为发射点, 出射俯仰角为95.5°—110.5°的61条声线的轨迹图. 图中, 绿色虚线、红色实线和灰色点线分别表示未经反射(not reflected, NR)的声线、仅与海面发生反射(surface reflected, SR)的声线和与海面海底均发生反射(surface reflected and bottom reflected, SRBR)的声线. 由于噪声源深度很小($ z_{\rm{ns}} = 0.5 $ m), 可以近似认为能够到达海面的声线即能够到达噪声源平面. 由图9 可知, 未经海面反射的NR声线在到达海面之前即发生翻转, 无法到达噪声源平面; 而经海面反射的SR和SRBR射线均可到达噪声源平面. 根据声场互易性原理, 没有噪声源位于NR声线轨迹上, 因此没有噪声能量可沿NR声线反向到达发射点, 即在NR声线出射俯仰角上发射点接收到的噪声能量为0; 而位于SR和SRBR声线轨迹上的噪声源辐射的声能量均可沿该声线反向到达发射点, 且噪声能量的到达角即为声线的出射俯仰角. 此外, 由于SR声线未经海底反射, 沿SR声线反向到达的噪声能量要明显强于沿SRBR声线反向到达的噪声能量. 定义出射俯仰角大于$ 90 ^\circ $ 的声线中, NR, SR和SRBR声线的出射俯仰角集合分别为$ \varTheta_{\rm NR} $ , $ \varTheta_{\rm{SR}} $ 和$ \varTheta_{\rm SRBR} $ . 对比图6(a) 和图9 可知, 在$ \varTheta_{\rm NR} $ 范围内, 无噪声能量到达, $ B(\theta) $ 形成凹槽; 在$ \varTheta_{\rm{SR}} $ 范围内, 噪声能量沿SR声线到达, $ B(\theta) $ 形成凹槽下边缘峰值; 在$ \varTheta_{\rm SRBR} $ 范围内, 噪声能量沿SRBR到达, $ B(\theta) $ 的高度降低.图 9 $ D_{\rm c} $ 取0, $ -40 $ 和40时, 以(0, 800 m)为发射点, 出射俯仰角为$95.5 ^\circ — 110.5 ^\circ$ 的声线轨迹图(图中绿色虚线、红色实线和灰色点线分别表示NR, SR和SRBR声线) (a) $ D_{\rm c}= $ 0; (b) $ D_{\rm c}=-40 $ ; (c) $ D_{\rm c}=40 $ Figure9. Traces of the rays launching from the (0, 800 m) point with the launching polar angles varying within $95.5 ^\circ - 110.5 ^\circ$ under the conditions where $ D_{\rm c} $ equals to 0, $ -40 $ , and 40 (green dashed lines, red solid lines and gray dotted lines in each subfigure indicate the NR, SR, and SRBR rays, respectively): (a) $ D_{\rm c} \!=\! $ 0; (b) $ D_{\rm c}\!=\! -40 $ ; (c) $ D_{\rm c}\!=\! 40$ 图9(a) 、图9(b) 和图9(c) 可以看出, 涡旋引起的声速扰动导致声线轨迹和$ \varTheta_{\rm{SR}} $ 改变, 相应地, 水平凹槽下边缘峰值所在的角度和凹槽宽度也随之变化. 结合图4(a) 和图9(a) 可知, $ D_{\rm c} = 0 $ 时, 由(0, 800 m)点出射, 向下传播的声线在到达声道轴以前以较小的折射率向下偏转, 在穿过声道轴后向上偏转, 然后发生翻转或与海底反射, 开始向上传播. 图9(a) 中, SR声线为出射俯仰角中等大小的声线, 其在靠近海底的深度发生翻转, 然后向上传播到达海面. 结合图4(c) 和图9(b) 可知, $ D_{\rm c} = -40 $ 时, 涡心深度上的声速减小, 声道轴深度变为800 m, 则由(0, 800 m)点出射, 向下传播的声线立刻以较大的折射率向上偏转. 因此, 与$ D_{\rm c} = 0 $ 的情况相比, $ D_{\rm c} = -40 $ 时出射俯仰角更大的声线才能在靠近海底的深度翻转, 并向上传播到达海面. 所以, 图9(b) 中, SR声线为出射俯仰角较大的声线. 结合图4(e) 和图9(c) 可知, $ D_{\rm c} = 40 $ 时, 涡心深度上的声速增大, 并成为局部最大声速, 导致由(0, 800 m)点出射, 向下传播的先以较大的折射率向下偏转, 再向上偏转. 因此, 与$ D_{\rm c} = 0 $ 的情况相比, $ D_{\rm c} = 40 $ 时出射俯仰角更小的声线即可在靠近海底的深度翻转, 并向上传播到达海面. 所以, 图9(c) 中, SR声线为出射俯仰角较小的声线.表1 列出了$ D_{\rm c} $ 取0, $ -40 $ 和40时, 出射角大于$ 90 \ ^\circ $ 的声线中, SR声线的最小出射俯仰角$\theta_{{\rm{SR}}, {\rm{min}}}$ , 最大出射俯仰角$\theta_{{\rm{SR}}, {\rm{max}}}$ , 中心出射俯仰角$\theta_{{\rm{SR}}, {\rm{c}}} = \left( \theta_{{\rm{SR}}, {\rm{min}}} + \theta_{{\rm{SR}}, {\rm{max}}} \right)/2$ 和出射俯仰角宽度$\Delta \theta_{\rm{SR}} = \theta_{{\rm{SR}}, {\rm{max}}} - \theta_{{\rm{SR}}, {\rm{min}}}$ . 表中$ D_{\rm c} $ 取0, $ -40 $ 和40时, $ \theta_{\rm{SR}}, {\rm{c}} $ 分别为$104.70 ^\circ$ , $ 109.65 ^\circ $ 和$97.00 ^\circ$ , 即冷涡和暖涡分别使$ \theta_{{\rm{SR}}, {\rm{c}}} $ 增大和减小. 相应地, 图6(a) 中$ D_{\rm c} $ 取0, $ -40 $ 和40时, $ B(\theta) $ 均在$ \theta_{{\rm{SR}}, {\rm{c}}} $ 附近形成水平凹槽下边缘峰值, 即冷涡和暖涡分别使凹槽宽度增大和减小. $ D_{\rm c} $ $\theta_{{\rm{SR} }, {\rm{min} }}$ $\theta_{{\rm{SR} }, {\rm{max} }}$ $\theta_{{\rm{SR} }, {\rm{c} }}$ $ \Delta \theta_{\rm{SR}} $ 0 104.3° 105.1° 104.70° 0.8° –40 109.3° 110.0° 109.65° 0.7° 40 96.3° 97.7° 97.00° 1.4°
表1 $ D_{\rm c} $ 取0, $ -40 $ 和40时, 以(0, 800 m)为发射点, 出射俯仰角大于$90 ^\circ$ 的声线中, SR声线的最小出射俯仰角$ \theta_{{\rm{SR}}, {\rm{min}}} $ 、最大出射俯仰角$\theta_{{\rm{SR}}, {\rm{max}}}$ 、中心出射俯仰角$\theta_{{\rm{SR}}, {\rm{c}}}$ 和出射俯仰角宽度$ \Delta \theta_{\rm{SR}} $ Table1. Minimal lunching polar angle $\theta_{{\rm{SR}}, {\rm{min}}}$ , maximal launching polar angle $\theta_{{\rm{SR}}, {\rm{max}}}$ , central launching polar angle $\theta_{{\rm{SR}}, {\rm{c}}}$ , and launching polar angle width $ \Delta \theta_{\rm{SR}} $ of the SR rays launching from the (0, 800 m) point with the launching polar angle being greater than $90 ^\circ$ under the conditions where $ D_{\rm c} $ equals to 0, $ -40 $ , and 40图9 和表1 可以看出, 冷涡和暖涡分别使$ \Delta \theta_{\rm{SR}} $ 减小和增大. 但是, $ \Delta \theta_{\rm{SR}} $ 的变化量较小, 并没有引起$ B(\theta) $ 中水平凹槽下边缘峰值的宽度发生明显改变. $ \Delta \theta_{\rm{SR}} $ 的变化可利用距离相关环境下的Snell定理[31 ,48 ] 解释. 由于该现象不是本文研究的重点, 在此不再展开讨论.图9 和前文分析可知, SR声线周期性地在海面形成会聚区, 会聚区内噪声源辐射的声能量沿SR声线反向到达发射点, 使$ B(\theta) $ 在$ \varTheta_{\rm{SR}} $ 内形成水平凹槽下边缘峰值. 因此, 会聚区内噪声源能量贡献的大小决定了水平凹槽下边缘峰值的高度.图10 给出$ D_{\rm c} $ 取0, $ -40 $ 和40时, 第一会聚区附近不同距离上的噪声源产生的噪声场在800 m深度上的垂直方向性$ B_r(\theta) $ . $ B_r(\theta) $ 由(13 )式通过数值计算得到. 可以看出, 在会聚区范围内, 噪声沿SR声线反向到达, 形成强能量贡献区; 在会聚区前后, 噪声沿SRBR声线反向到达, 形成弱能量贡献区. 由图9 可知, 冷涡和暖涡对会聚区宽度的影响较小, 但是分别使SR声线的密集度减小和增大, 表明其分别使会聚区内的传播损失增大和减小. 反映在图10 中, 冷涡和暖涡对强能量贡献区的宽度几乎没有影响, 但是分别使强能量贡献区中单个$ {\rm d}r $ 内噪声源的能量贡献减小和增大. 所以, 冷涡和暖涡分别使会聚区内噪声源的总能量贡献减小和增大. 相应地, 二者分别使水平凹槽下边缘峰值的高度降低和升高.图 10 $ D_{\rm c} $ 取0, $ -40 $ 和40时, 40—50 km不同$ {\rm d}r $ 范围内的噪声源产生的噪声场在800 m深度上的垂直方向性$ B_r(\theta) $ (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-40 $ ; (c) $ D_{\rm c}=40 $ Figure10. Noise vertical noise directionalities $ B_r(\theta) $ generated by noise sources within $ {\rm d}r $ at 800 m depth with r varying from 40 to 50 km under the conditions where $ D_{\rm c} $ equals to 0, $ -40 $ , and 40: (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-40 $ ; (c) $ D_{\rm c}=40 $ 2.3.3 节指出, 噪声垂直相关函数$ \varGamma(d) $ 可以用噪声垂直方向性$ B(\theta) $ 表达. 利用(17 )式和(18 )式计算可以说明, $ B(\theta) $ 中噪声能量覆盖的角度越大, $ \varGamma(d) $ 的振幅越小, 噪声的垂直相关性越低. 在涡心深度上, 冷涡和暖涡分别使$ B(\theta) $ 中水平凹槽的宽度增大和减小, 即两者分别导致$ B(\theta) $ 中噪声能量覆盖的角度减小和增加. 因此, 在涡心深度上, 冷涡和暖涡分别使噪声垂直相关性上升和下降.4.2.远离涡心深度上噪声特性变化的机理 -->4.2.远离涡心深度上噪声特性变化的机理 采用与4.1 节相同的方法, 分析远离涡心深度上噪声垂直方向性变化的原因.图11 给了出$ D_{\rm c} $ 取0, $ -40 $ 和40时, 以(0, 2000 m)为发射点, 出射俯仰角为$ 100 ^\circ —105 ^\circ $ 的21条声线的轨迹图. 由图4(c) 和图4(e) 可知, 在2000 m以下, 涡旋对声速分布的扰动很小. 相应地, 在图11 各子图中, 声线由发射点向下传播的轨迹几乎不受涡旋的影响. 因此, $ D_{\rm c} $ 取0, $ -40 $ 和40时, 在靠近海底的深度翻转并向上传播到达海面的SR声线具有相近的出射俯仰角.图 11 $ D_{\rm c} $ 取0, $ -40 $ 和40时, 以(0, 2000 m)为发射点, 出射俯仰角为$95.5 ^\circ — 110.5 ^\circ$ 的声线轨迹图(图中绿色虚线、红色实线和灰色点线分别表示NR, SR和SRBR声线) (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-40 $ ; (c) $ D_{\rm c}=40 $ Figure11. Traces of the rays launching from the (0, 2000 m) point with the launching polar angles varying within $95.5 ^\circ - 110.5 ^\circ$ under the conditions where $ D_{\rm c} $ equals to 0, $ -40 $ , and 40 (green dashed lines, red solid lines and gray dotted lines in each subfigure indicate the NR, SR, and SRBR rays, respectively): (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-40 $ ; (c) D c = 40表2 列出了$ D_{\rm c} $ 取0, $ -40 $ 和40时, 以(0, 2000 m)为发射点, 出射俯仰角大于$ 90 ^\circ $ 的声线中, SR声线的最小出射俯仰角$ \theta_{{\rm{SR}}, {\rm{min}}} $ 、最大出射俯仰角$ \theta_{{\rm{SR}}, {\rm{max}}} $ 、中心出射俯仰角$\theta_{{\rm{SR}}, {\rm{c}}}$ 和出射俯仰角宽度$ \Delta \theta_{\rm{SR}} $ . 可以看出, $ D_{\rm c} $ 取0, $ -40 $ 和40时, $\theta_{{\rm{SR}}, {\rm{c}}}$ 均为$ 103 ^\circ $ 左右. 相应地, 图6(b) 中, $ D_{\rm c} $ 取0, $ -40 $ 和40时, $ B(\theta) $ 均在$ 103 ^\circ $ 形成水平凹槽下边缘峰值, 凹槽宽度也保持为$ 26 ^\circ $ 不变. 此外, 冷涡和暖涡分别使$ \Delta \theta_{\rm{SR}} $ 增大和减小, 但是$ \Delta \theta_{\rm{SR}} $ 的变化较小, 并未引起$ B(\theta) $ 中水平凹槽下边缘峰值的宽度发生明显变化. $ D_{\rm c} $ $\theta_{{\rm{SR} }, {\rm{min} }}$ $\theta_{{\rm{SR} }, {\rm{max} }}$ $\theta_{{\rm{SR} }, {\rm{c} }}$ $ \Delta \theta_{\rm{SR}} $ 0 102.3° 103.4° 102.85° 1.1° –40 102.0° 103.4° 102.70° 1.4° 40 102.7° 103.4° 103.05° 0.7°
表2 $ D_{\rm c} $ 取0, $ -40 $ 和40时, 以(0, 2000 m)为发射点, 出射俯仰角大于$90 ^\circ$ 的声线中, SR声线的最小出射俯仰角$\theta_{{\rm{SR}}, {\rm{min}}}$ 、最大出射俯仰角$\theta_{{\rm{SR}}, {\rm{max}}}$ 、中心出射俯仰角$\theta_{{\rm{SR}}, {\rm{c}}}$ 和出射俯仰角宽度$ \Delta \theta_{\rm{SR}} $ Table2. Minimal launching polar angle $\theta_{{\rm{SR}}, {\rm{min}}}$ , maximal launching polar angle $\theta_{{\rm{SR}}, {\rm{max}}}$ , central launching polar angle $\theta_{{\rm{SR}}, {\rm{c}}}$ , and launching polar angle width $ \Delta \theta_{\rm{SR}} $ of the SR rays launching from the (0, 2000 m) point with the launching polar angle being greater than $90 ^\circ$ under the conditions where $ D_{\rm c} $ equals to 0, $ -40 $ , and 40图12 给出了$ D_{\rm c} $ 取0, $ -40 $ 和40时, 第一会聚区附近不同距离上的噪声源产生的噪声场在2000 m深度上的垂直方向性$ B_r(\theta) $ . 由图11 可以看出, SR声线的密集度受涡旋的影响很小, 即会聚区内传播损失的变化很小, 但冷涡和暖涡分别使会聚区的宽度增大和减小. 反映在图12 中, 强能量贡献区中单个$ {\rm d}r $ 内噪声源的能量贡献几乎不受涡旋的影响, 但是强能量贡献区的范围受冷涡和暖涡的影响分别增大和减小. 最终, 冷涡和暖涡分别导致会聚区内噪声源的总能量贡献增加和减少. 相应地, 图6(b) 中, 冷涡和暖涡分别引起$ B(\theta) $ 中水平凹槽下边缘峰值的高度升高和降低.图 12 $ D_{\rm c} $ 取0, $ -40 $ 和40时, 40—50 km不同$ {\rm d}r $ 范围内的噪声源产生的噪声场在2000 m深度上的垂直方向性$ B_r(\theta) $ (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-40 $ ; (c) $ D_{\rm c}=40 $ Figure12. Noise vertical noise directionalities $ B_r(\theta) $ generated by noise sources within $ {\rm d}r $ at 2000 m depth with r varying from 40 to 50 km under the conditions where $ D_{\rm c} $ equals to 0, $ -40 $ , and 40: (a) $ D_{\rm c}=0 $ ; (b) $ D_{\rm c}=-40 $ ; (c) $ D_{\rm c}=40 $ $ B(\theta) $ 中水平凹槽下边缘峰值的高度, 未引起凹槽的宽度变化, 即未引起噪声能量覆盖的角度范围的变化, 所以涡旋对$ \varGamma(d) $ 的影响很小, 几乎可以忽略不计.5.推广与未来的工作 在以上讨论中, 接收点均位于涡旋的水平中心位置. 当接收点偏离涡旋水平中心时, 随着两者间距离H 的增大, 环境随水平方位角的变化逐渐增大, 涡旋引起的水平折射现象逐渐增强, 涡旋可能同时引起噪声垂直和水平空间特性的变化. 但是, 当接收点位于涡旋水平中心附近, 即H 较小时, 环境随水平方位角的变化较小, 水平折射现象可近似忽略, 噪声场在各水平角度上仍是近似均匀的, 已有分析和结论可得到良好的推广. 以下通过仿真分析进行说明.$ D_{\rm c} = 40 $ 的情况为例, 接收点与涡心之间的距离为$ H = D_{ r}/10 = 12 \ {\rm{km}} $ . 图13 给出了接收点偏离涡心时的几何俯视示意图. 图中, O 和$ O_{\rm R} $ 分别表示涡心和接收点, $ \varphi $ 表示以$ O_{\rm R} $ 为中心的水平方位角, 扇面1和扇面2分别为以$ O_{\rm R} $ 为中心$ \varphi = 0 ^\circ $ 和$ \varphi = 180 ^\circ $ 方向上宽度为$ {\rm d}r $ 的扇面. 水平面内, 直角坐标系以涡心O 为坐标原点.图 13 几何俯视示意图Figure13. Downward-view geometry图14 给出了涡心深度(800 m)水平截面内的声速分布. 由(3 )式可知, 该截面内的声速变化最剧烈. 可以看出, 当声能量沿$ \varphi = 90 ^\circ $ 或$ \varphi = 270 ^\circ $ 方向传播时, 声速的水平变化最大. 在这两个方向上, 最大水平声速梯度约为$ 7.14\times 10^{-5} \ {{\rm{s}}^{{{ - 1}}}} $ . 相比之下, 无涡旋时深海等温层内垂直声速梯度的平均值约为$ 1.84\times 10^{-2} \ {{\rm{s}}^{{{ - 1}}}} $ . 因此, 该环境下的水平折射作用远小于垂直折射作用.图 14 800 m深度水平截面内的声速分布Figure14. Sound distribution in the 800 m depth cross section图15 比较了使用Bellhop3D, 分别选择$ {{N}} \times {\rm{2 D}} $ 和3D模式, 计算得到的$ O_{\rm R} $ 处800 m深度上的声源到噪声源深度(0.5 m)水平截面的传播损失. 根据声场互易性可知, 图中的传播损失等价于各噪声源到$ O_{\rm R} $ 处800 m深度上传播损失. 考虑到涡旋主要影响水平方向附近的噪声能量, 计算中取声线垂直发射角为$ 60 ^\circ — 120 ^\circ $ , 声线水平发射角为$ 0 ^\circ — 359 ^\circ $ . 对比图15(a) 和图15(b) 可知, 选择N × 2D和3D模式计算得到的传播损失的差异很小, 说明该环境下的水平折射现象很弱可近似忽略.图 15 使用Bellhop3D, 分别选择${{N}} \times {\rm{2 D}}$ 和$ \rm 3 D $ 模式计算得到的$ O_{\rm R} $ 处800 m深度上的声源到噪声源深度(0.5 m)水平截面的传播损失 (a) ${{N}} \times {\rm{2 D}}$ ; (b)${\rm{3 D}}$ Figure15. Transmission loss from $ O_{\rm R} $ 800 m depth to the noise sources depth (0.5 m) cross section computed by the Bellhop3D program in ${{N}} \times {\rm{2D}}$ and 3D modes: (a) N × 2D; (b) 3D$N\times 2 {\rm D}$ 模型计算$ O_{\rm R} $ 处的噪声场. 由图14 可知, $\varphi = 0 ^\circ$ 和$\varphi = 180 ^\circ$ 方向上的声速分布差异最大. 图16 给出了在偏心位置$ O_{\rm R} $ 处仅考虑扇面1和扇面2内噪声源的贡献计算得到的800 m深度上的噪声垂直方向性, 与涡心位置O 处800 m深度上的噪声垂直方向性进行对比. 计算中将扇环面积替换为圆环面积以便于比较计算结果. 图中三条曲线几乎完全重合, 说明$ O_{\rm R} $ 处各水平方向上的噪声场仍是近似均匀的, 且$ O_{\rm R} $ 与O 处的噪声垂直方向性几乎一致(由于噪声垂直相关性可由噪声垂直方向性计算得到, $ O_{\rm R} $ 与O 处的噪声垂直相关性也几乎一致).图 16 800 m深度上, 偏心位置处仅考虑扇面1或扇面2内噪声源的贡献得到的噪声垂直方向性以及涡心位置处的噪声垂直方向性Figure16. Noise vertical directionalities at the off-center position 800 m depth generated by the noise sources within sector 1 and sector 2 in comparison with the noise vertical directionality at the eddy center 800 m depth$ H < D_{ r}/10 $ 范围内, 环境的水平不均匀性较弱, 水平折射现象可近似忽略, 噪声场是近似水平各向同性的, 且噪声垂直空间特性的差异很小, 已有分析和结论可得到良好的推广.$ H > D_{ r}/10 $ ), 随着环境的水平不均匀性和水平折射现象的增强, 涡旋可能同时影响噪声垂直和水平空间特性. 未来的工作中, 将使用$ {{N}} \times {\rm{2 D}} $ 或3D模型对这一问题开展进一步的研究.6.小 结 本文以高斯涡模型描述涡旋引起的声速扰动, 分别使用射线和抛物方程模型描述近场和远场噪声的传播过程, 研究了不同强度的冷涡和暖涡对其水平中心位置不同深度上的噪声垂直空间特性的影响规律. 针对涡旋引起的变化, 使用射线逆推方法分析了涡旋影响噪声垂直空间特性的机理. 本文得到的主要结论有: 1)当接收点位于涡心深度时, 冷涡导致噪声沿SR声线反向到达接收点的俯仰角远离水平方向、能量减弱, 因此噪声垂直方向性中的水平凹槽变宽, 凹槽下边缘峰值的高度降低, 且噪声垂直相关性因噪声能量覆盖的俯仰角范围减小而增强; 2)当接收点远离涡心深度时, 冷涡对噪声沿SR声线反向到达接收点的俯仰角影响较小, 但使其能量增强, 因此噪声垂直方向性中的水平凹槽宽度保持不变, 但凹槽下边缘峰值的高度上升, 因噪声能量覆盖的俯仰角范围变化很小, 噪声垂直相关性基本不变; 3)暖涡对噪声垂直空间的影响规律和机理与冷涡相反; 4)涡旋的绝对强度越强, 引起的声速扰动越大, 因此对噪声垂直空间特性的影响也越大. 当接收点偏离涡旋水平中心, 但两者间的距离$ H < D_{ r}/10 $ 时, 噪声场是近似水平各向同性的, 且噪声垂直空间特性的差异很小, 以上结论仍是近似成立的. 未来的工作中, 将对$ H > D_{r}/10 $ 范围内涡旋对噪声垂直和水平空间特性的影响开展进一步的研究. 




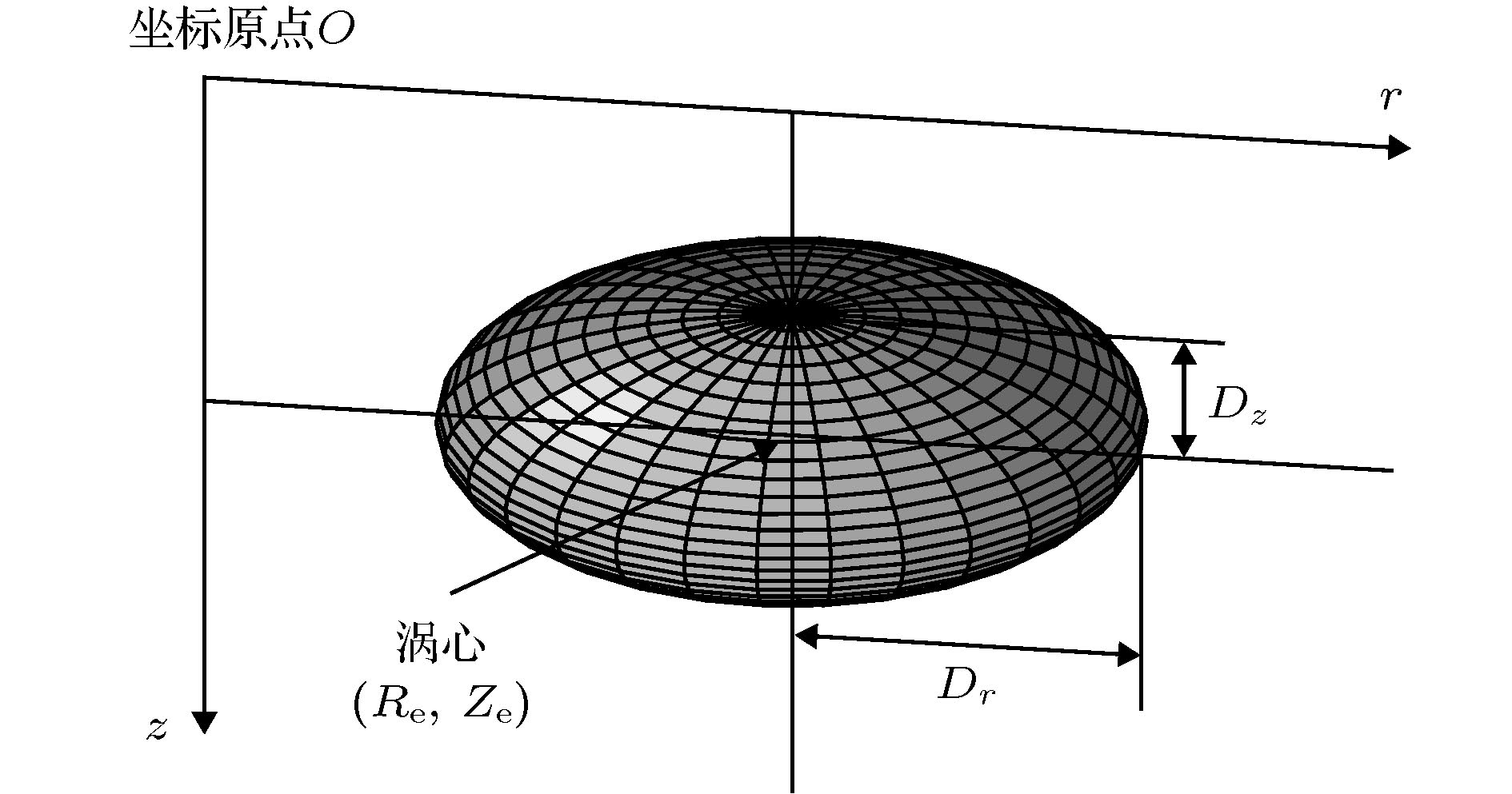 图 1 高斯涡模型示意图
图 1 高斯涡模型示意图
























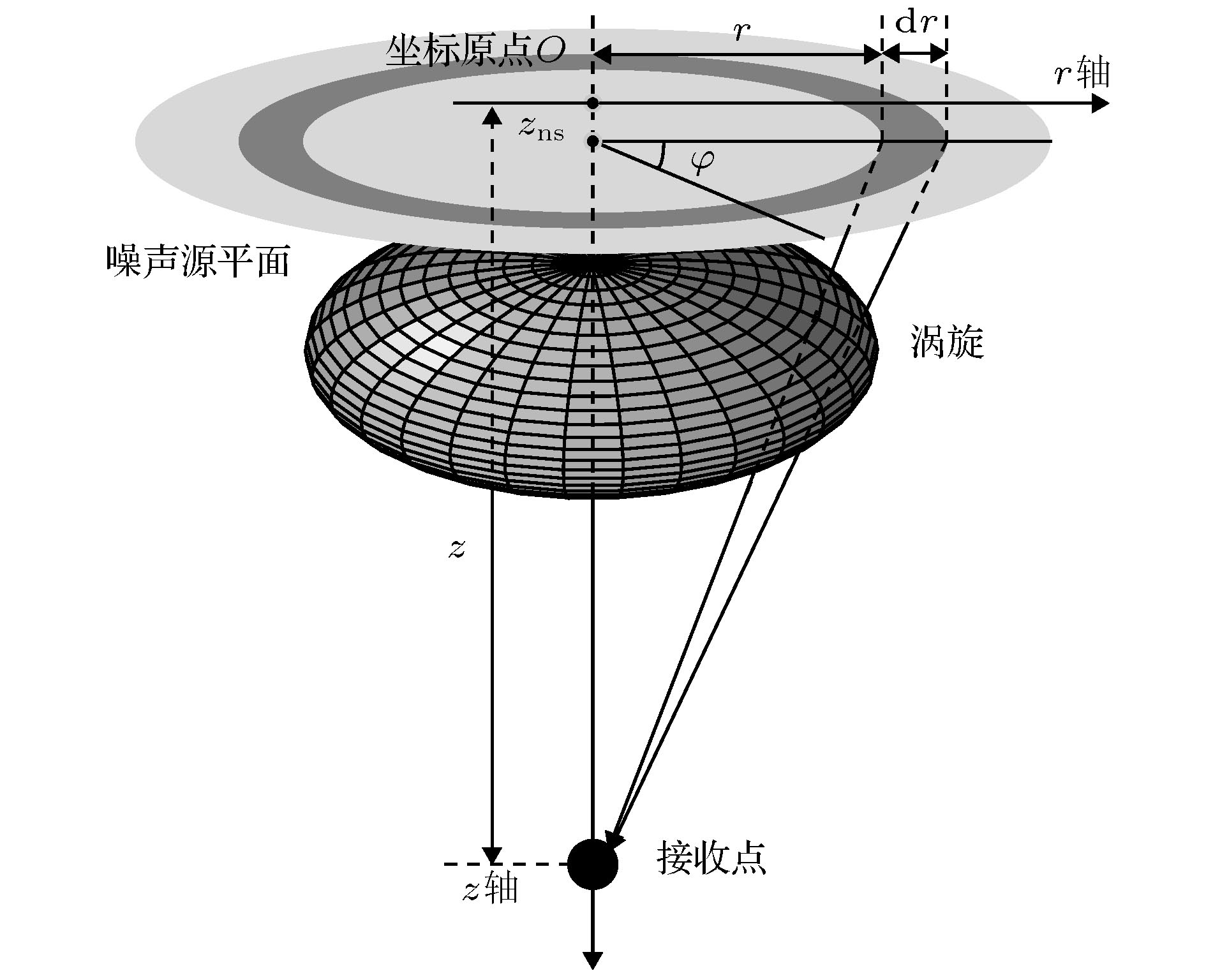 图 2 噪声场模型几何示意图
图 2 噪声场模型几何示意图









































 图 3 仿真环境
图 3 仿真环境

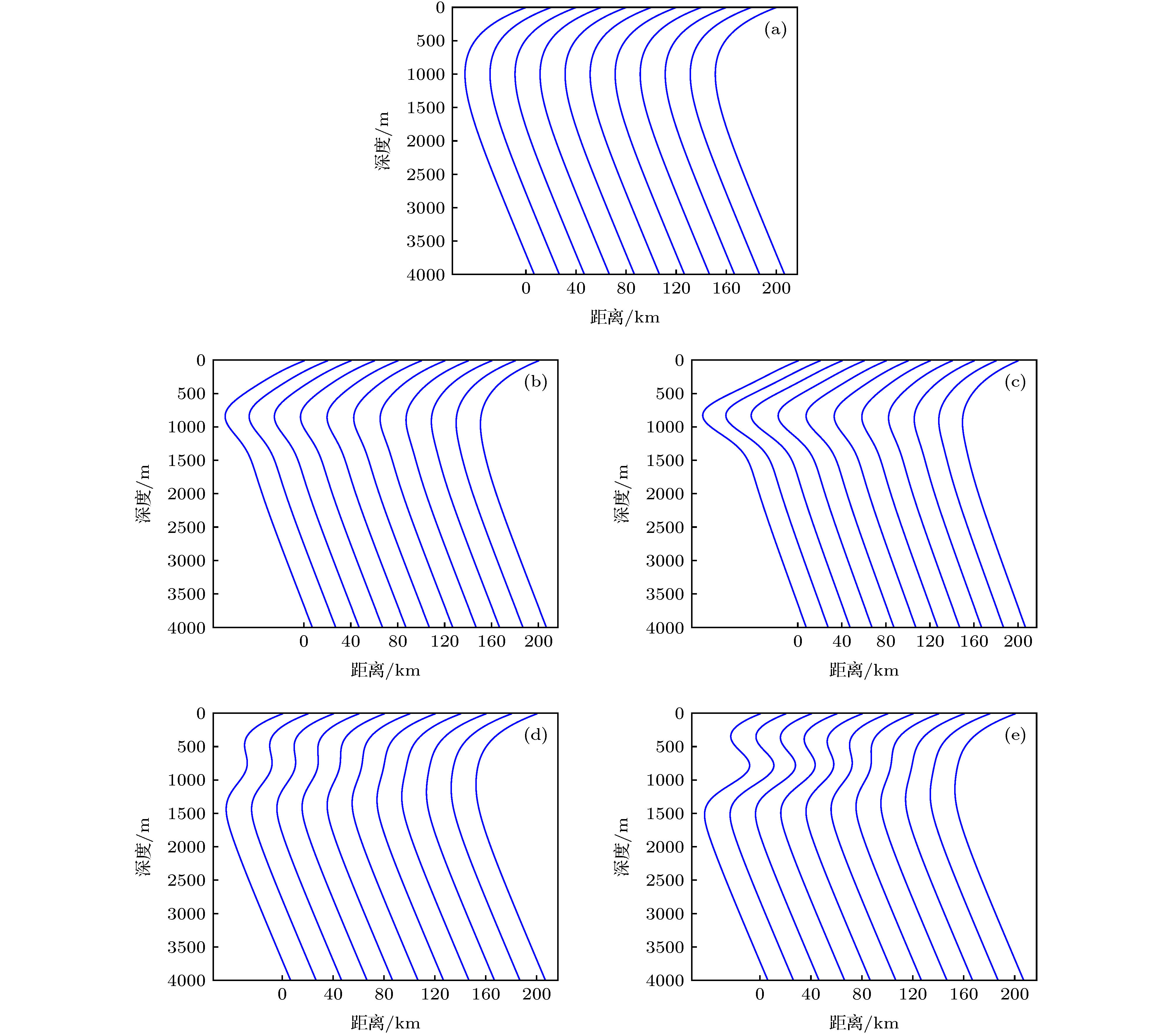 图 4 涡旋强度
图 4 涡旋强度

















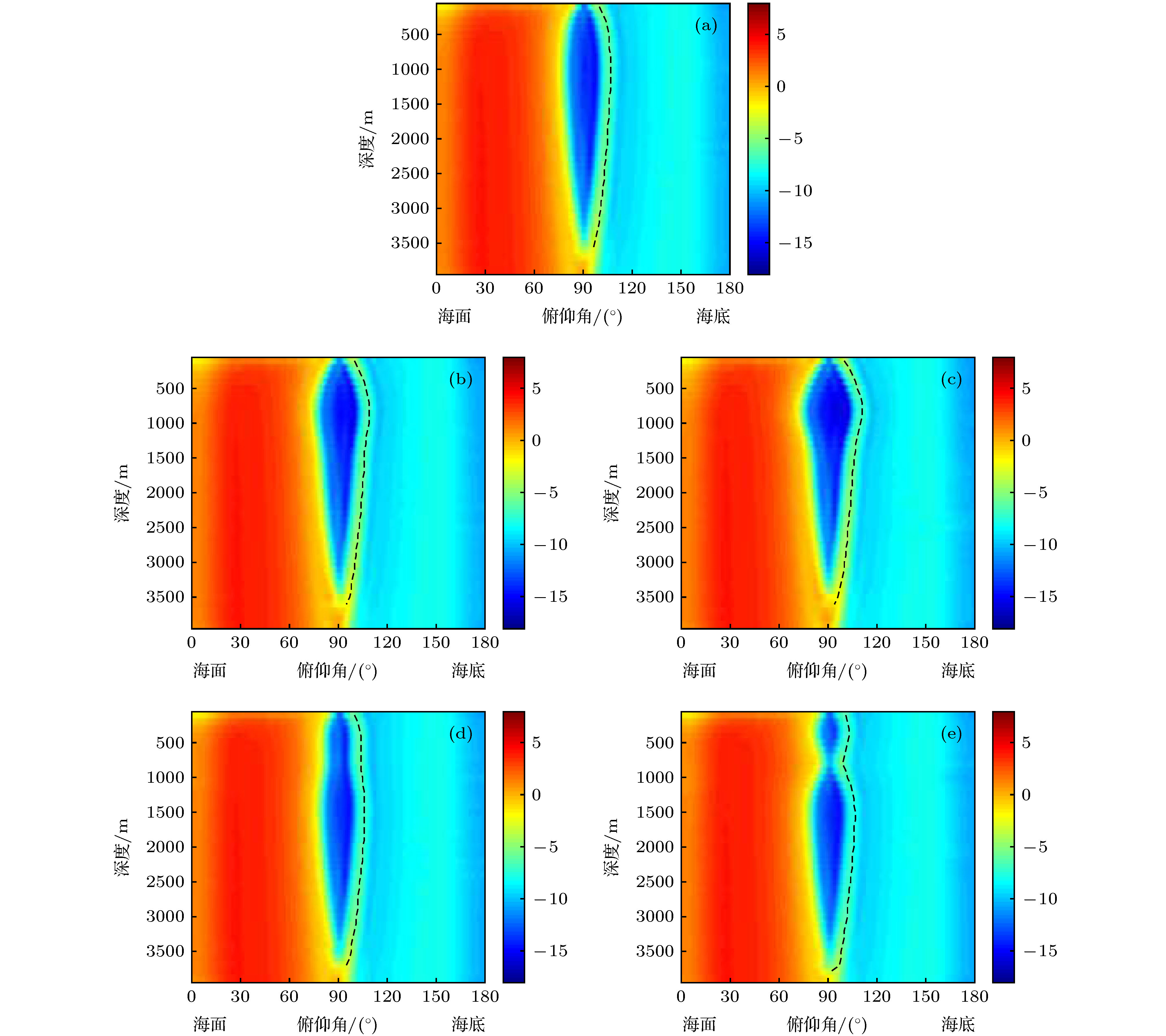 图 5 涡旋强度
图 5 涡旋强度










































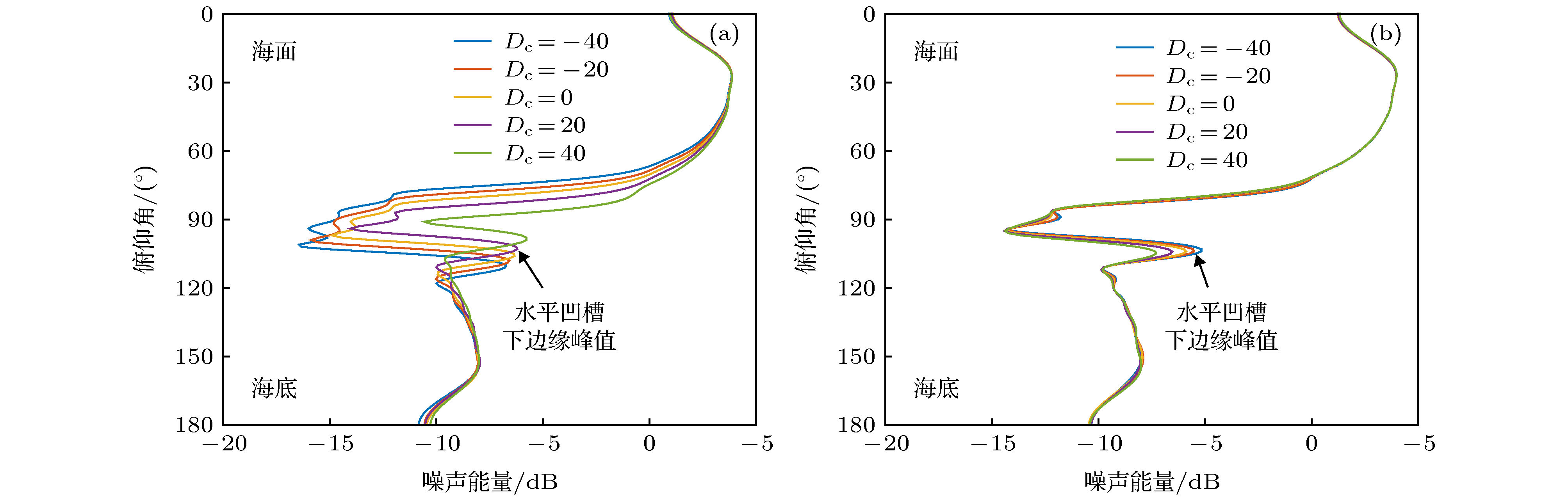 图 6 800和2000 m深度上, 涡旋强度
图 6 800和2000 m深度上, 涡旋强度











 图 7 800 m深度上, 涡旋强度
图 7 800 m深度上, 涡旋强度





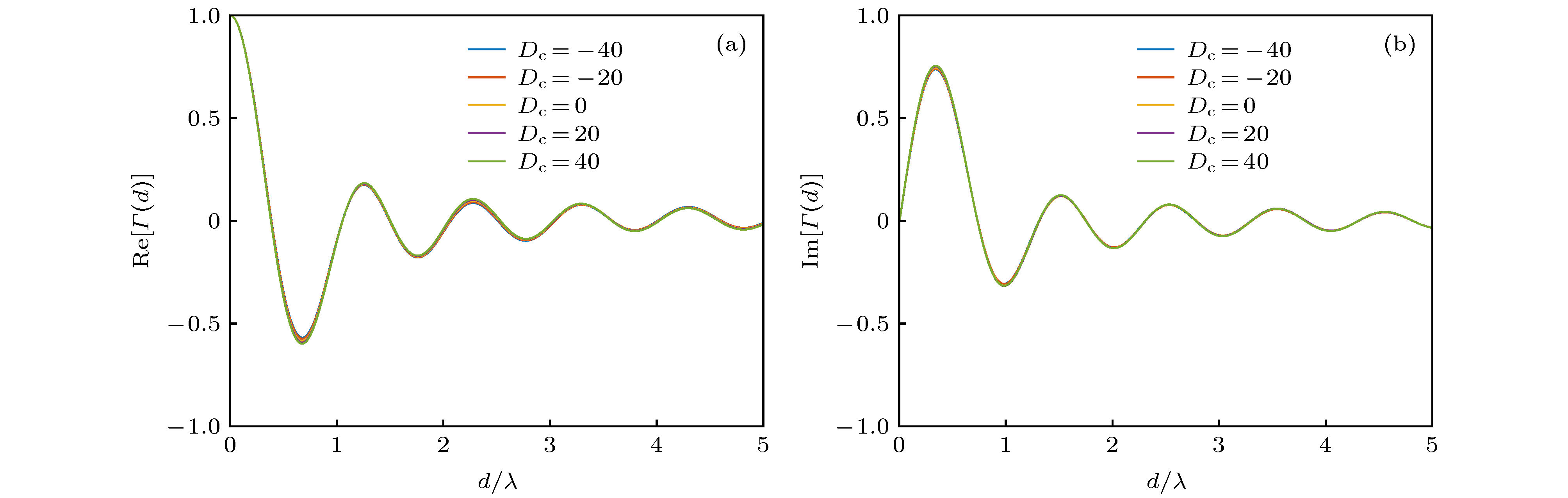 图 8 2000 m深度上, 涡旋强度
图 8 2000 m深度上, 涡旋强度




























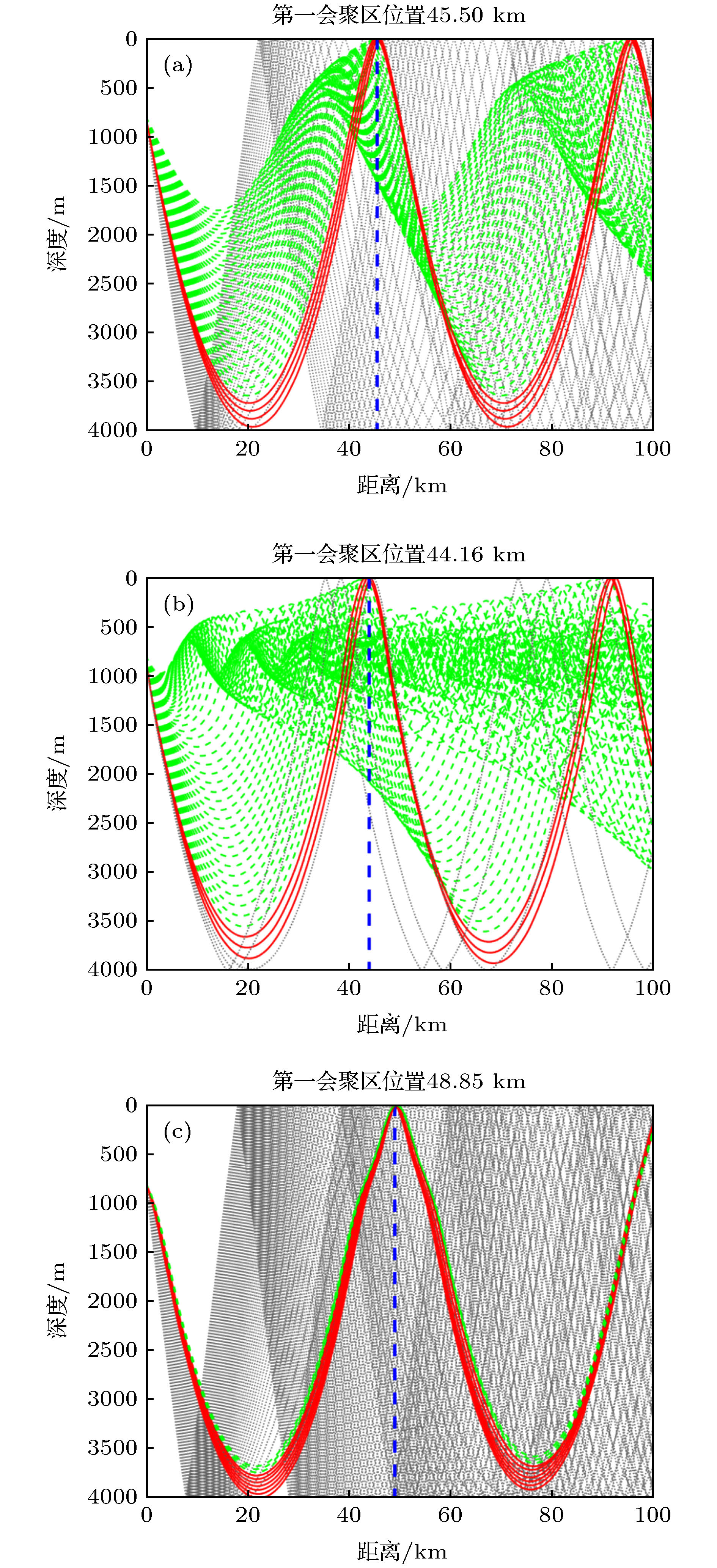 图 9
图 9 






























































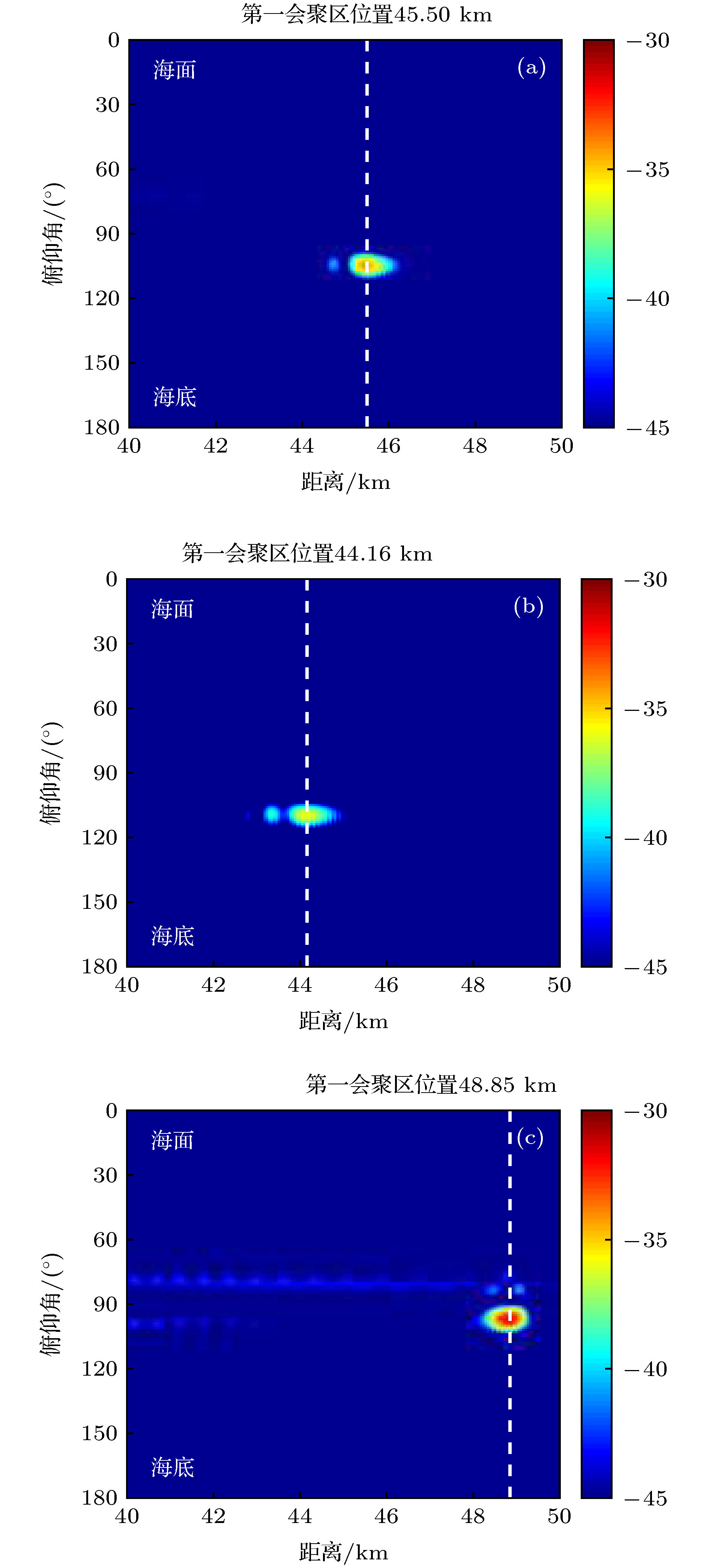 图 10
图 10 
























 图 11
图 11 
















































 图 12
图 12 
























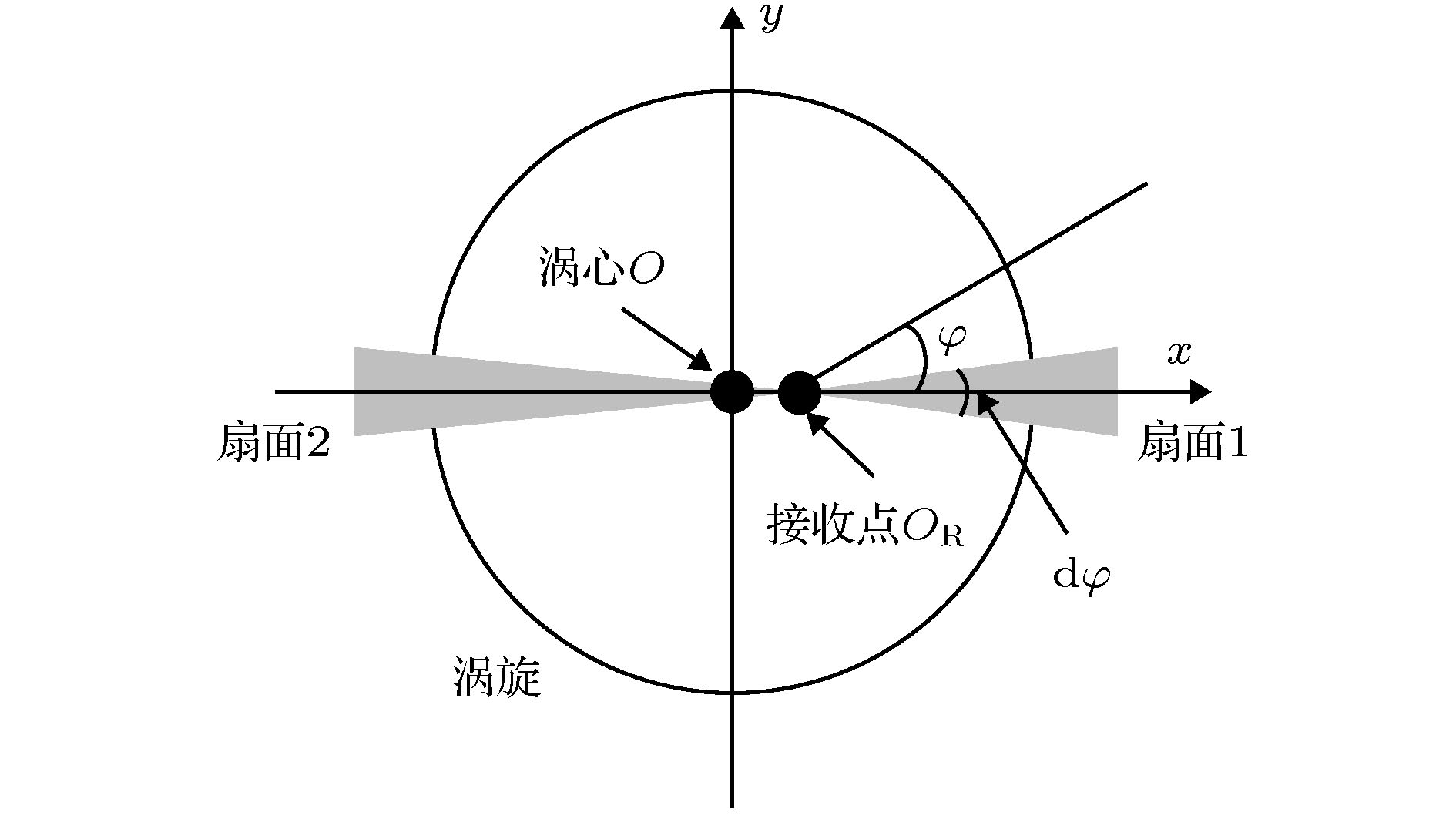 图 13 几何俯视示意图
图 13 几何俯视示意图



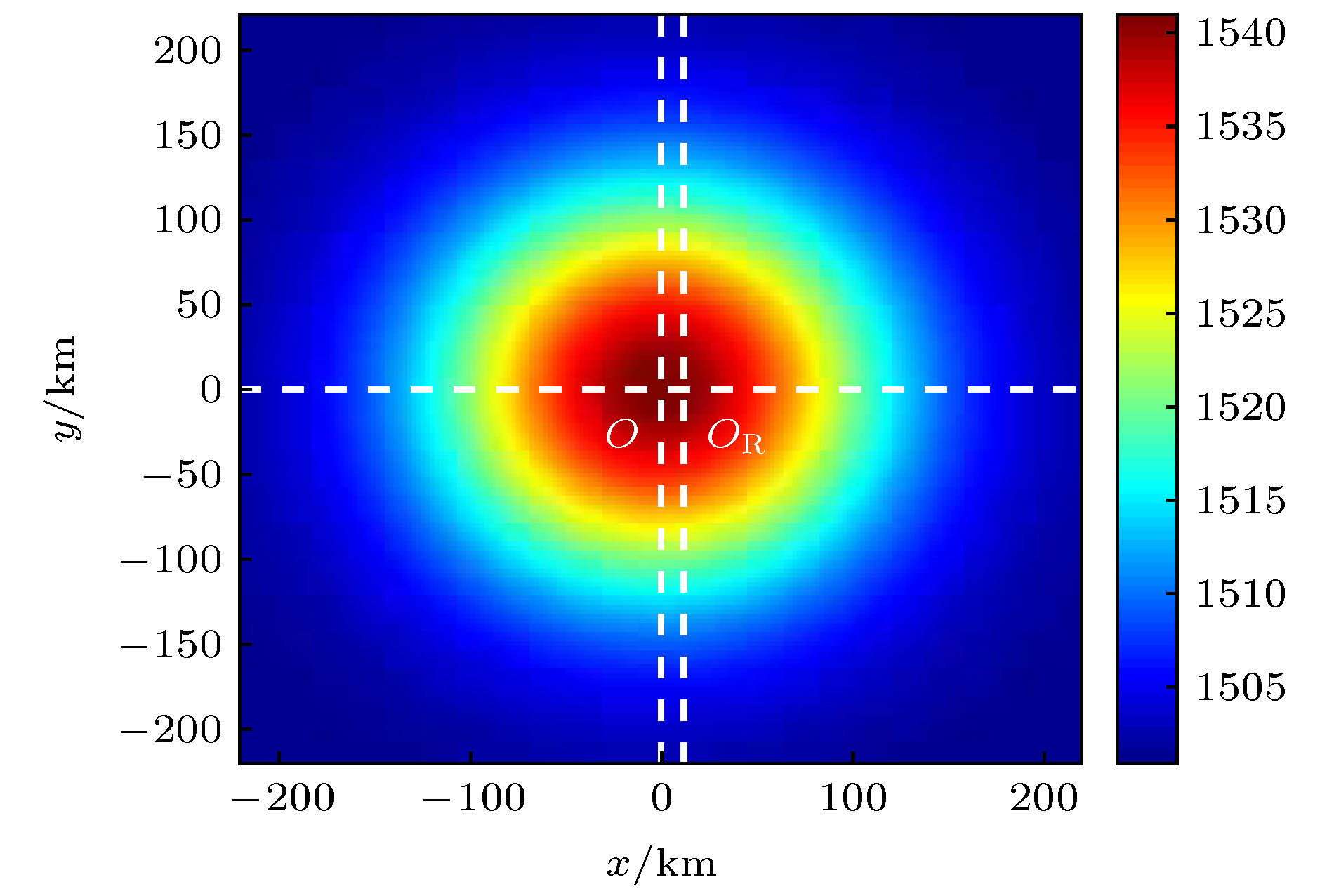 图 14 800 m深度水平截面内的声速分布
图 14 800 m深度水平截面内的声速分布




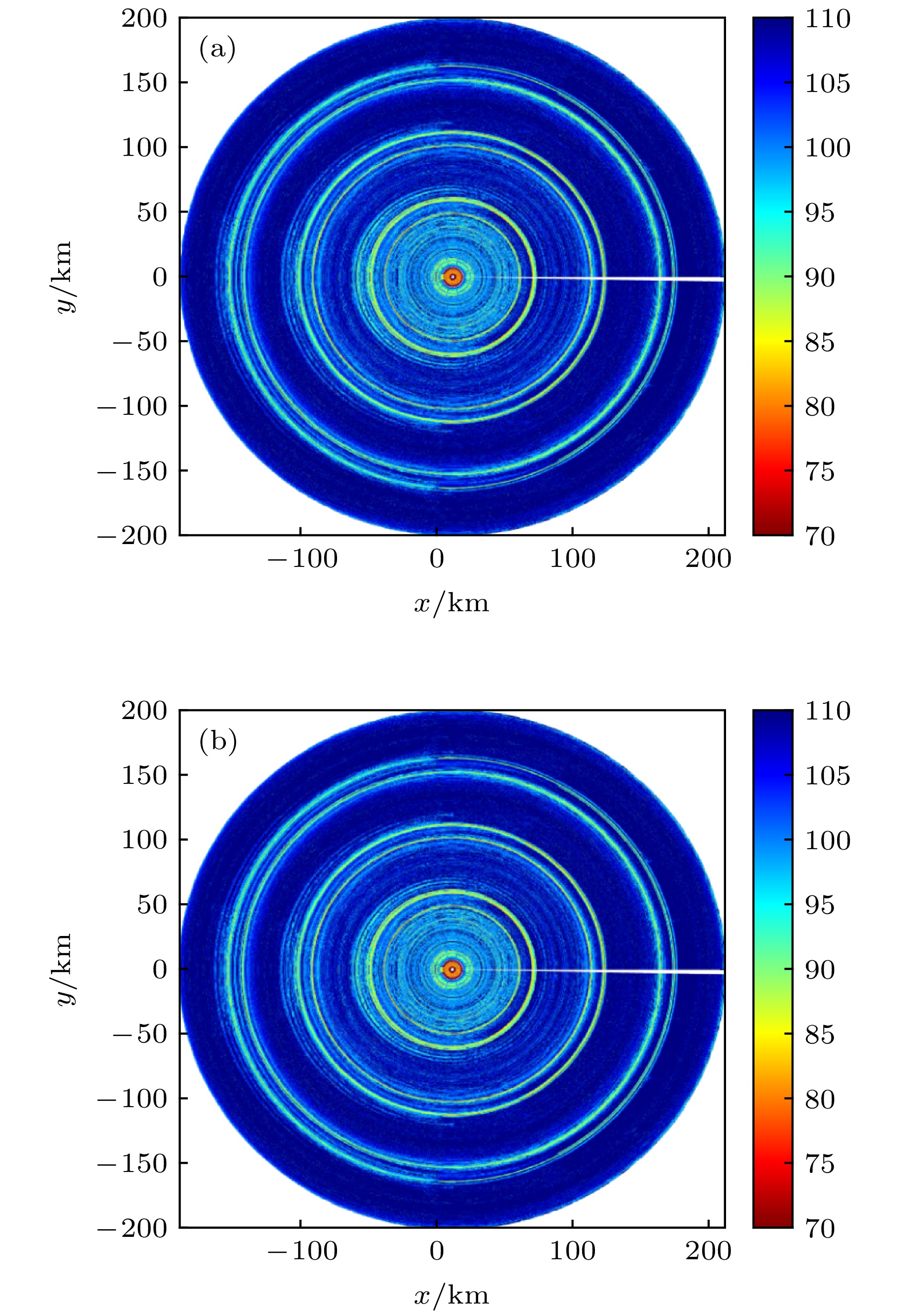 图 15 使用Bellhop3D, 分别选择
图 15 使用Bellhop3D, 分别选择














 图 16 800 m深度上, 偏心位置处仅考虑扇面1或扇面2内噪声源的贡献得到的噪声垂直方向性以及涡心位置处的噪声垂直方向性
图 16 800 m深度上, 偏心位置处仅考虑扇面1或扇面2内噪声源的贡献得到的噪声垂直方向性以及涡心位置处的噪声垂直方向性




