全文HTML
--> --> -->除了理解此类体系丰富现象背后的物理机理, 科学家们开始思索如何将活性物质体系的能量提取出来为人类所用, 比如细菌自发运动的能量[10—13]. 细菌的运动是通过消耗化学能来实现, 其自驱运动本身已经打破系统的时间对称性. 为了实现定向旋转, 还需要打破空间对称性, 常见的方法是使用形状不对称的棘轮. 比如, Angelani等[14]的模拟研究表明, 非对称棘轮浸入棒状粒子能够产生定向转动. Sokolov等[15]在细菌作为活性物质的实验中也观察到了类似的现象. 近年来, 将柔性链状结构的软边界[16—23]置于活性粒子浴中的动力学行为越来越受研究者的关注. 由于活性粒子的碰撞, 软边界会发生非热波动进而出现反常的现象. 最近, 我们课题组研究发现, 柔性[21]和半刚性链[22]嫁接的圆盘在活性粒子浴中会因为链构象的对称性被打破, 自发产生结构的不对称性, 从而产生长时间持续的定向运动.
我们之前的研究工作表明[21], 活性粒子倾向于聚集在链上高曲率区域, 而柔性链的形变对粒子的积聚存在正反馈效果[23], 从而进一步加强柔性链形变, 使粒子大量聚集. 上述工作中我们通过多根链嫁接到纳米盘来实现自发转动, 本文中我们设计更简单的具有柔性边界的对称性棘轮, 研究其在非平衡粒子浴内的行为, 进一步探讨柔性边界是否能让棘轮转动. 我们发现粒子的聚集导致柔性边界的结构发生改变, 力分布的不对称性诱导棘轮产生扭矩, 进而实现棘轮的定向转动. 活性粒子的自驱力大小、旋转扩散能力和体系粒子密度都对棘轮定向转动产生影响: 棘轮的旋转速率随活性力和活性粒子数密度的增大而增加; 随活性粒子的旋转扩散系数的增大而减小.


 图 1 棘轮在活性粒子浴中(绿色部分)的初始示意结构 虚线部分表示刚性支架, 红色表示柔性边界, 左上部分绿色粒子中的黑色箭头表示活性粒子的推进力方向, 右上部分为一段边界上的粒子排布, 粒子间间距为0.25σ
图 1 棘轮在活性粒子浴中(绿色部分)的初始示意结构 虚线部分表示刚性支架, 红色表示柔性边界, 左上部分绿色粒子中的黑色箭头表示活性粒子的推进力方向, 右上部分为一段边界上的粒子排布, 粒子间间距为0.25σFigure1. The initial structure of flexible boundary (red) in the active particle bath (green). The dashed lines represent four rigid trestles. The black arrow in the green particle indicates the active force direction of the active particle in the upper left. The upper right part is the particle arrangement on a boundary. The spacing between the particles is 0.25σ.
体系中的活性粒子遵循郎之万动力学, 其运动方程可以表示为:




在我们的分子动力学模拟过程中, 周期性盒子大小为200σ × 200σ. 我们采用约化单位, 令m = 1, σ = 1, kBT = 1; 时间单位为

3.1.压力不对称分布诱导转动
首先考察了支架数为Ns = 4, 活性粒子的数密度为φ = 0.025、旋转扩散系数取Dr = 0.0001、驱动力F = 40时棘轮的转动行为(见附属材料中的视频F = 40.avi). 如图2(a)所示, 当棘轮处于活性粒子浴中会发生定向旋转的现象. 图 2 (a)四支架棘轮随时间转动的示意图, 图示中刚性支架被忽略, 左上图黑点代表棘轮质心, 其中黑色箭头表示从质心到一支点的方向以此表明棘轮发生转动, 右下图是该情况下的旋转角度与角速度随着时间的变化曲线图; (b)上图为棘轮柔性边界的曲率分布图, 下图为压力分布图, 其中棘轮支架数为Ns = 4, 活性粒子的数密度为φ = 0.025, 旋转扩散系数取Dr = 0.0001, 驱动力F = 40
图 2 (a)四支架棘轮随时间转动的示意图, 图示中刚性支架被忽略, 左上图黑点代表棘轮质心, 其中黑色箭头表示从质心到一支点的方向以此表明棘轮发生转动, 右下图是该情况下的旋转角度与角速度随着时间的变化曲线图; (b)上图为棘轮柔性边界的曲率分布图, 下图为压力分布图, 其中棘轮支架数为Ns = 4, 活性粒子的数密度为φ = 0.025, 旋转扩散系数取Dr = 0.0001, 驱动力F = 40Figure2. (a) Schematic diagram of the ratchet rotation with time for Ns = 4, φ = 0.025, Dr = 0.0001, F = 40. The black dot on the top left figure represents the center of mass of the ratchet; the black arrows denote the orientation from the center of mass of ratchet to the fixed point of boundary to indicate the rotation of the ratchet. The right-down figure shows the time evolution of angle and angular velocity of ratchet. (b) The curvature distribution (up) of boundary and the pressure distribution (down) around it
经过观察棘轮及活性粒子的运动轨迹, 我们发现开始时刻棘轮不转动, 活性粒子在驱动力作用下, 快速聚集到柔性边界周围, 并诱导其发生形变, 如图2(a)的左上图. 当粒子聚集到一定程度, 集聚在棘轮上曲率较大处的活性粒子出现崩塌的情况: 在棘轮上接近支架顶端处的大部分活性粒子会被棘轮抛出, 也就是甩尾现象(图2(a)中红色圆圈处). 这种运动导致粒子在边界上的分布不均匀, 进而对棘轮施加一定的扭矩, 导致棘轮的旋转. 图2(a)的右下图为旋转角度θ随着时间的变化曲线, 里面的插图为对应的角速度ω随时间的变化曲线. 旋转角速度的计算依据以下公式:
为了更好地探究棘轮旋转的机制, 计算了构成棘轮的柔性链的曲率和所受压力的分布情况, 如图2(b)所示. 该图的上图为棘轮的柔性链的曲率分布图, 其中散点颜色由深蓝到红色代表曲率由小到大变化; 下图为组成棘轮的柔性链所受压力的分布散点图, 其中深蓝色部分代表组成棘轮的柔性链所受压力较小, 由蓝色到红色部分, 表示组成棘轮的柔性链所受压力逐渐增大. 经过观察运动轨迹, 发现棘轮沿顺时针方向旋转, 与曲率、压力分布图所表示的效果一致. 压力分布在高曲率位置, 且具有不对称性, 进而产生扭转力, 驱使其转动.
2
3.2.自驱力效应
接下来研究转动速度和驱动力之间的关系. 选取了支架数为Ns = 4的棘轮, 体系中活性粒子的数密度为φ = 0.025, 其中φ = σ2Np/4R02. 如图3(a)所示, 随着活性力的增加, 棘轮的平均旋转角速度单调增加. 图3(b)是体系进入稳态后在不同活性力的作用下, 棘轮的瞬时旋转角速度. 从图3(b)中可以看出, 当活性力较小时(F = 20)棘轮的旋转角速度较小且瞬时角速度有正有负, 棘轮的旋转方向不固定. 随着活性力的进一步增加(从F = 20增大到F = 80), 棘轮上聚集的活性粒子增多且扭矩也会变得越来越大, 从而实现定向转动. 通过图3也可以发现, 棘轮的瞬时角速度涨落随驱动力的增大而在一定程度上增大, 这是因为驱动力增大, 粒子运动速度较快, 粒子碰撞棘轮时, 对棘轮的扰动性增强.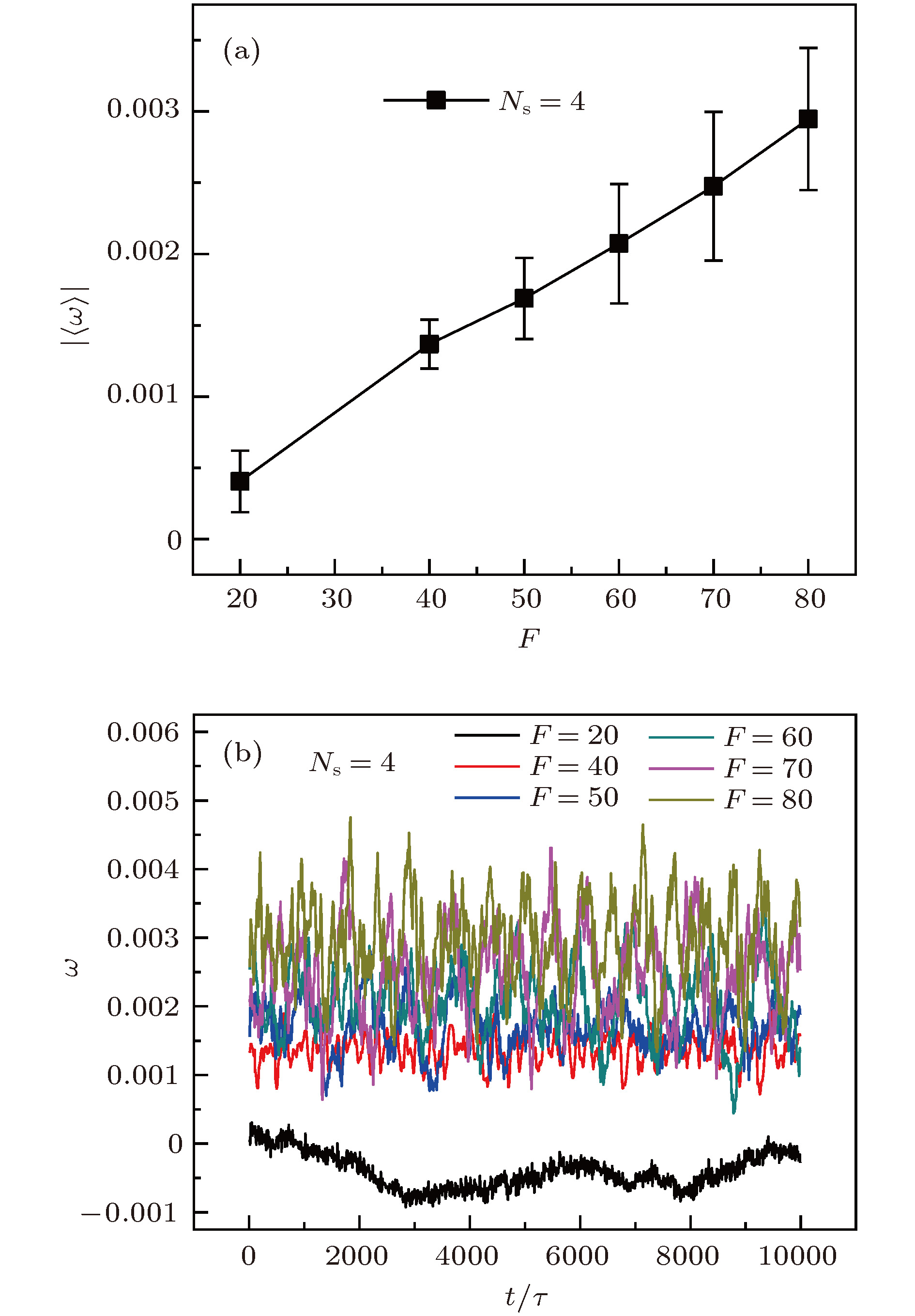 图 3 支架数为4、不同活性力的作用下, 棘轮的旋转角速度 (a)平均角速度, (b)瞬时角速度, 误差棒表示平均角速度的标准方差
图 3 支架数为4、不同活性力的作用下, 棘轮的旋转角速度 (a)平均角速度, (b)瞬时角速度, 误差棒表示平均角速度的标准方差Figure3. (a) Average angular velocity and (b) instantaneous angular velocity for the four rigid trestles with various active forces. The error bars represent the standard the deviations of angular velocity of rigid trestles.
2
3.3.密度效应
在我们之前的工作中[20]发现囊泡内的活性粒子的非均匀分布会对囊泡的形状产生一定的影响, 且囊泡的形状与活性粒子的密度成正相关关系[27]. 那么对于本文所模拟的体系, 活性粒子的密度也势必会对柔性边界有一定影响, 且可能会对棘轮的旋转有促进或者抑制作用. 为了更好地验证我们的设想, 在模拟过程中我们保持活性粒子的旋转扩散系数为Dr = 0.0001, 活性粒子施加的驱动力选取F = 80, 研究不同粒子数密度φ下棘轮的旋转角速度的变化. 从图4中可以看出, 随着活性粒子数密度的增加, 棘轮的角速度也增加, 由此可以理解为棘轮的转动速率随着活性粒子数密度的提高而提高. 从图中可以直观地看出, 当活性粒子的数密度较小时, 活性粒子浴中活性粒子的集聚效果没有粒子数密度大时明显(图4插图). 大量粒子的聚集有利于棘轮扭矩的增加, 进而增加角速度. 因边界周围凹陷区域聚集的数目有限, 从图中可以看出, 随着粒子数密度的增加, 角速度增幅降低; 大量的增加粒子数密度, 可能出现饱和现象. 图 4 棘轮的平均角速度与粒子数密度之间的关系, 内部两张插图分别对应活性粒子密度φ = 0.025和φ = 0.1, 误差棒表示平均角速度的标准方差
图 4 棘轮的平均角速度与粒子数密度之间的关系, 内部两张插图分别对应活性粒子密度φ = 0.025和φ = 0.1, 误差棒表示平均角速度的标准方差Figure4. Average angular velocity vs the number density of active particles. The insets are typical snapshots for φ = 0.025 and φ = 0.1. The error bars represent the standard the deviations of angular velocity.
2
3.4.旋转扩散系数效应
研究过程中, 我们把旋转扩散系数Dr作为可调参数来探究其对棘轮转动速率的影响[23]. 在模拟时, 为了便于观察, 给活性粒子施加的驱动力取较大的一组F = 80. 得到不同Dr下棘轮的旋转角速度与时间的关系图, 如图5(a)所示. 图 5 (a)不同旋转扩散系数Dr下棘轮的旋转角速度与时间的关系; (b)平均旋转角速度与Dr的关系, 内部两插图分别对应旋转扩散系数Dr = 0.0001和Dr = 0.01, 误差棒表示平均角速度的标准方差
图 5 (a)不同旋转扩散系数Dr下棘轮的旋转角速度与时间的关系; (b)平均旋转角速度与Dr的关系, 内部两插图分别对应旋转扩散系数Dr = 0.0001和Dr = 0.01, 误差棒表示平均角速度的标准方差Figure5. (a) The angular velocity as a function of time for various rotational diffusion coefficients, Drs. (b) The average angular velocity as a function of Dr. The insets are typical snapshots for Dr = 0.0001和and Dr = 0.1. The error bars represent the standard the deviations of angular velocity.
从旋转角速度的变化曲线可以看出, 在旋转扩散系数Dr较小时, 棘轮的转动速率较高, 且随着旋转扩散系数Dr的增大, 棘轮的转动速率会降低, 当增大到一定程度时, 棘轮的转动速率基本为零且棘轮出现不定向旋转的情况. 图5(b)为棘轮的旋转角速度平均值与旋转扩散系数Dr的关系图, 由此可以得出, 棘轮的转动速率随着Dr的变大而降低, 并且当其达到一定值时, 定向旋转消失. 因粒子脱离柔性边界的能力随着Dr的增加而增加[28], 换句话说, Dr的增加导致边界聚集的粒子数目减少(图5(b)插图), 从而导致棘轮扭矩降低, 定向转动速度下降. 当Dr增加到一定程度, 活性粒子在边界滞留时间大大降低, 粒子对边界的碰撞和热碰撞类似, 定向转动消失.
2
3.5.支架数效应
最后考虑支架数对棘轮旋转速率的影响. 因为活性力较小时棘轮的旋转方向不固定, 为了避免棘轮的旋转方向对研究结果的影响, 选取活性力为F = 80的情况. 图6为棘轮旋转角速度的平均值与棘轮支架数的影响, 从图像中可以直观地看出, 在活性力一定时, 棘轮的旋转角速度随着支架数的增大而减小. 当支架数增加时, 凹陷区增加, 大量粒子或聚集到这些区域, 减弱了粒子分布的不均匀性(图6插图), 进而使扭矩降低, 从而引起转动角速度下降. 图 6 棘轮的平均角速度与支架数之间的关系, 内部两插图分别对应支架数为4和6, 误差棒表示平均角速度的标准方差
图 6 棘轮的平均角速度与支架数之间的关系, 内部两插图分别对应支架数为4和6, 误差棒表示平均角速度的标准方差Figure6. The average angular velocity of ratchet vs the number of rigid trestle. The insets are typical snapshots for the number of ratchet wheel. The error bars represent the standard the deviations of angular velocity.
2
