引 言
近年来, 增材制造作为一项新兴的技术已经广泛应用于功能性部件的快速成形当中. 增材制造技术相对于传统的减材制造具有“自下而上”逐层累积的特点, 是一种从无到有的制造方式. 这为过去受到传统制造方式约束而难以成形的复杂结构件的制造提供了便利, 使其在航空航天工业、能源工业以及核工业得到了广泛应用. 由于增材制造工艺过程中存在复杂的热力学过程, 这导致增材制造成形件的力学性能尤其是疲劳性能与传统制造工艺成形件存在较大的区别. 更重要的是, 增材制造工艺成形过程中的局部热历史可以直接控制, 进而可以通过控制增材制造成形件的微观结构来获得特定的宏观力学性能. 这一特点大大刺激了关于成形工艺对增材制造成形件的疲劳性能影响的研究需求[1-3]. 为此, 大量****对这一问题进行了研究. Yadollahi等[4]研究了打印方向与热处理工艺对选择性激光熔化成形不锈钢疲劳行为的影响, 他们发现制造过程中形成的缺陷以及打印方向对疲劳行为有显著的影响. Greitemeier等[5]研究了表面粗糙度对直接金属激光烧结和电子束熔化Ti-6Al-4V疲劳寿命的影响, 他们发现材料的疲劳寿命随着表面粗糙度的增加而下降. Riemer等[6]研究了选择性激光熔化成形316L不锈钢的疲劳性能, 他们分析了选择性激光熔化成形316L不锈钢的微观结构并考虑了工艺参数?微观结构?疲劳性能之间的关系. Cao等[7]对比了选择性激光熔化成形316钢和轧制316钢的疲劳性能, 发现选择性激光熔化成形316钢相较于轧制316钢具有更高的疲劳极限.
在上述工作中, 大部分****对增材制造成形件疲劳性能的研究主要考虑以下3个方面: 缺陷、微观结构和表面粗糙度. 然而对于本文研究的奥氏体316不锈钢, 相比于缺陷, 材料疲劳裂纹萌生对微观结构更加敏感[8]. Pegues等[8]发现尽管大多数增材制造成形材料在循环载荷下的失效主要是由于工艺过程中引入的缺陷造成, 然而对于激光束粉床熔化奥氏体不锈钢, 大多数导致材料失效的疲劳微裂纹周围并未出现材料缺陷. 因此他们得出激光束粉床熔化奥氏体不锈钢的疲劳裂纹萌生相较于缺陷与材料微观结构特征更相关. Gordon等[9]研究发现直接能量沉积304L不锈钢工艺过程中引入的缺陷对总体疲劳性能的影响可以忽略. 基于上述对增材制造奥氏体不锈钢疲劳裂纹萌生机理的研究, 本文将材料微观结构作为主要影响高周疲劳性能的因素而忽略缺陷对疲劳性能的影响. 另外, 由于疲劳实验件会进行表面抛光处理, 本文忽略了表面粗糙度带来的影响.
除了上述关于增材制造成形件疲劳性能的实验研究之外, 一些****提出了增材制造材料疲劳性能的预测模型. Romano等[10]使用基于缺陷的模型预测了增材制造AlSi10Mg的疲劳极限, 他们对材料的初始缺陷尺寸进行建模并通过基于断裂力学的裂纹扩展模型预测了增材制造AlSi10Mg的S-N曲线. Ebrahimi和Mohammadi[11]根据所提出的有限元模型对直接金属激光烧结Hybrid钢的疲劳寿命进行了预测, 通过使用von-Mises屈服准则、雨流法和Miner理论计算了直接金属激光烧结Hybrid钢的循环寿命. Vayssette等[12]根据轮廓测定法和断层摄影技术获得的表面扫描图像建立了有限元模型, 通过使用非局部基于Crossland准则的疲劳指数预测了选择性激光熔化Ti-6Al-4V的高周疲劳性能. 在上述工作中, 提出的疲劳模型都是基于宏观物理量建立的, 其局限性在于不能有效考虑材料微观结构对疲劳性能的影响. Przybyla和McDowell[13-14]提出了一种考虑材料微观结构的统计学有限元模型来量化微观结构对疲劳寿命的影响, 他们使用晶体塑性理论研究代表体单元的局部力学响应. Robert等[15]基于多晶有限元模型研究了几何缺陷对纯铜高周疲劳性能的影响, 发现将晶体塑性理论和介观高周疲劳准则结合可以很好地预测缺陷尺寸对疲劳性能的影响. 尽管上述工作考虑了晶粒内部位错滑移对疲劳性能的影响, 然而晶界对疲劳性能的影响这一关键因素在这些模型中仍未能得到体现. 为此, 本文使用弹塑性内聚力模型以及晶界介观高周疲劳准则考虑晶界对疲劳性能的影响. 同时, 使用晶体塑性理论和Papadopoulos疲劳准则来研究晶粒内部位错滑移对疲劳性能的影响. 因此, 本文得以将中位错滑移与晶界对疲劳性能的影响同时考虑.
1.
计算模型
1.1
晶体塑性模型
本文使用基于Huang[16]的工作, 使用唯象学晶体塑性材料用户子程序来模拟晶粒内部的力学行为. 这里采用





$$ {dot gamma ^{(alpha )}} = {dot a^{(alpha )}} {frac{{{tau ^{(alpha )}}}}{{{g^{(alpha )}}}}} {left| {frac{{{tau ^{(alpha )}}}}{{{g^{(alpha )}}}}} ight|^{n - 1}} $$  | (1) |
其中






$$ {tau ^{(alpha )}} = {{boldsymbol{m}}^{(alpha )}}:{boldsymbol{sigma }} $$  | (2) |
$$ {{boldsymbol{m}}^{(alpha )}} = frac{1}{2}left( {{{boldsymbol{l}}^{(alpha )}} otimes {{boldsymbol{s}}^{(alpha )}} + {{boldsymbol{s}}^{(alpha )}} otimes {{boldsymbol{l}}^{(alpha )}}} ight) $$  | (3) |
当前强度



$$ {dot g^{(alpha )}} = sumlimits_beta {{h_{alpha beta }}} {dot gamma ^{(beta )}} $$  | (4) |
$$ {h_{alpha alpha }} = {h_0}{{{ m{sech}}} ^2}left( {frac{{{h_0}gamma }}{{{tau _s} - {tau _0}}}} ight) $$  | (5) |
$$ {h_{alpha beta }} = q{h_{alpha alpha }}{text{ }},; {alpha ne beta } $$  | (6) |
$$ gamma = sumlimits_alpha {int_0^t {left| {{{dot gamma }^{(alpha )}}} ight|} } {text{d}}t $$  | (7) |
其中





1.2
弹塑性内聚力模型
本模型同时考虑了线弹性、塑性流动、线性硬化和损伤演化. 首先, 弹塑性分离位移可以分解为以下两部分
$$ {boldsymbol{delta }} = {{boldsymbol{delta }}^e} + {{boldsymbol{delta }}^p} $$  | (8) |
其中



$$ begin{gathered} psi = psi left( {{{boldsymbol{delta }}^e},d,{{bar delta }^p}} ight) = frac{1}{2}left[ {(1 - d)({boldsymbol{delta }} - {{boldsymbol{delta }}^p}) cdot {{boldsymbol{D}}^e} cdot ({boldsymbol{delta }} - {{boldsymbol{delta }}^p}) + H{{bar delta }^{{p^2}}}} ight] end{gathered} $$  | (9) |
其中d和H分别是损伤因子和线性硬化模量.


$$ {{boldsymbol{D}}^e} = {K_n}{boldsymbol{n}} otimes {boldsymbol{n}} + {K_t}({boldsymbol{I}} - {boldsymbol{n}} otimes {boldsymbol{n}}) $$  | (10) |
其中


$$ d = left{ begin{array}{l}dfrac{{{delta ^f}left( {left| {bf{delta }} ight| - {delta ^d}} ight)}}{{left| {bf{delta }} ight|left( {{delta ^f} - {delta ^d}} ight)}},;{delta ^d} < left| {bf{delta }} ight| < {delta ^f}1,;;;left| {bf{delta }} ight| geqslant {delta ^f}0,;;;left| {bf{delta }} ight| leqslant {delta ^d}end{array} ight. $$  | (11) |
其中


ight| $

结合式(9), 牵引应力

$$ {boldsymbol{sigma }} = frac{{partial psi }}{{partial {{boldsymbol{delta }}^e}}} = (1 - d){{boldsymbol{D}}^{text{e}}} cdot ({boldsymbol{delta }} - {{boldsymbol{delta }}^p}) $$  | (12) |
此处牵引应力

$$ {boldsymbol{sigma }} = {}^n{boldsymbol{sigma }} + {}^t{boldsymbol{sigma }} = ({boldsymbol{n}} otimes {boldsymbol{n}}) cdot {boldsymbol{sigma }} + ({boldsymbol{I}} - {boldsymbol{n}} otimes {boldsymbol{n}}) cdot {boldsymbol{sigma }} $$  | (13) |
其中法向牵引应力可以进一步表示为
$$ {}^n{boldsymbol{sigma }} = {}^nsigma {boldsymbol{n}} $$  | (14) |
采用以下形式的屈服函数来避免两个相邻表面的界面穿透[19]
$$ varPhi = left| {{}^t{boldsymbol{sigma }}} ight| + leftlangle {{}^nsigma } ight angle - (sigma _y^0 + H{bar delta ^p}) $$  | (15) |
其中
ight
angle $


$$ {boldsymbol{N}} = frac{{partial varPhi }}{{partial {boldsymbol{sigma }}}} = {}^n{boldsymbol{N}} + {}^t{boldsymbol{N}} = frac{{leftlangle {{}^nsigma } ight angle }}{{{}^nsigma }}{boldsymbol{n}} + frac{{{}^t{boldsymbol{sigma }}}}{{left| {{}^t{boldsymbol{sigma }}} ight|}} $$  | (16) |
其中


$$ {{boldsymbol{dot delta }}^p} = dot{epsilon} {boldsymbol{N}} = dot{epsilon} left( {frac{{leftlangle {{}^nsigma } ight angle }}{{{}^nsigma }}{boldsymbol{n}} + frac{{{}^t{boldsymbol{sigma }}}}{{left| {{}^t{boldsymbol{sigma }}} ight|}}} ight) $$  | (17) |
其中


1.3
高周疲劳准则
为了研究选择性激光熔化成形316钢和冷轧成形316钢的高周疲劳行为, 本文分别对晶粒内部和晶界使用不同的高周疲劳准则.
针对晶粒部分, 本文采用由Papadopoulos[20]提出的介观疲劳准则. 该准则假设如果给定滑移系的累积塑性滑移不超过临界值, 则晶粒内部将不会有疲劳裂纹萌生. 为此, 通过介观物理量表示的Papadopoulos疲劳准则可以写为
$$ begin{split} & {f^{{text{grain}}}} = frac{1}{b}sqrt {leftlangle {tau _{s,a}^2} ight angle } + frac{a}{b}mathop {max }limits_t left[ {leftlangle {{sigma _n}(t)} ight angle } ight] leqslant 1 hfill & sqrt {leftlangle {tau _{s,a}^2} ight angle } = sqrt 5 sqrt {frac{1}{{{N_s}}}sumlimits_{g = 1}^{{N_g}} {left[ {frac{1}{{{N_g}}}sumlimits_{s = 1}^{{N_s}} {tau _{s,a}^2(g,s)} } ight]} } hfill & leftlangle {{sigma _n}(t)} ight angle = frac{1}{{{N_p}}}sumlimits_{g = 1}^{{N_g}} {left[ {frac{1}{{{N_g}}}sumlimits_{s = 1}^{{N_p}} {{sigma _n}(g,p,t)} } ight]} hfill end{split} $$  | (18) |
其中






ight
angle } $

ight
angle $

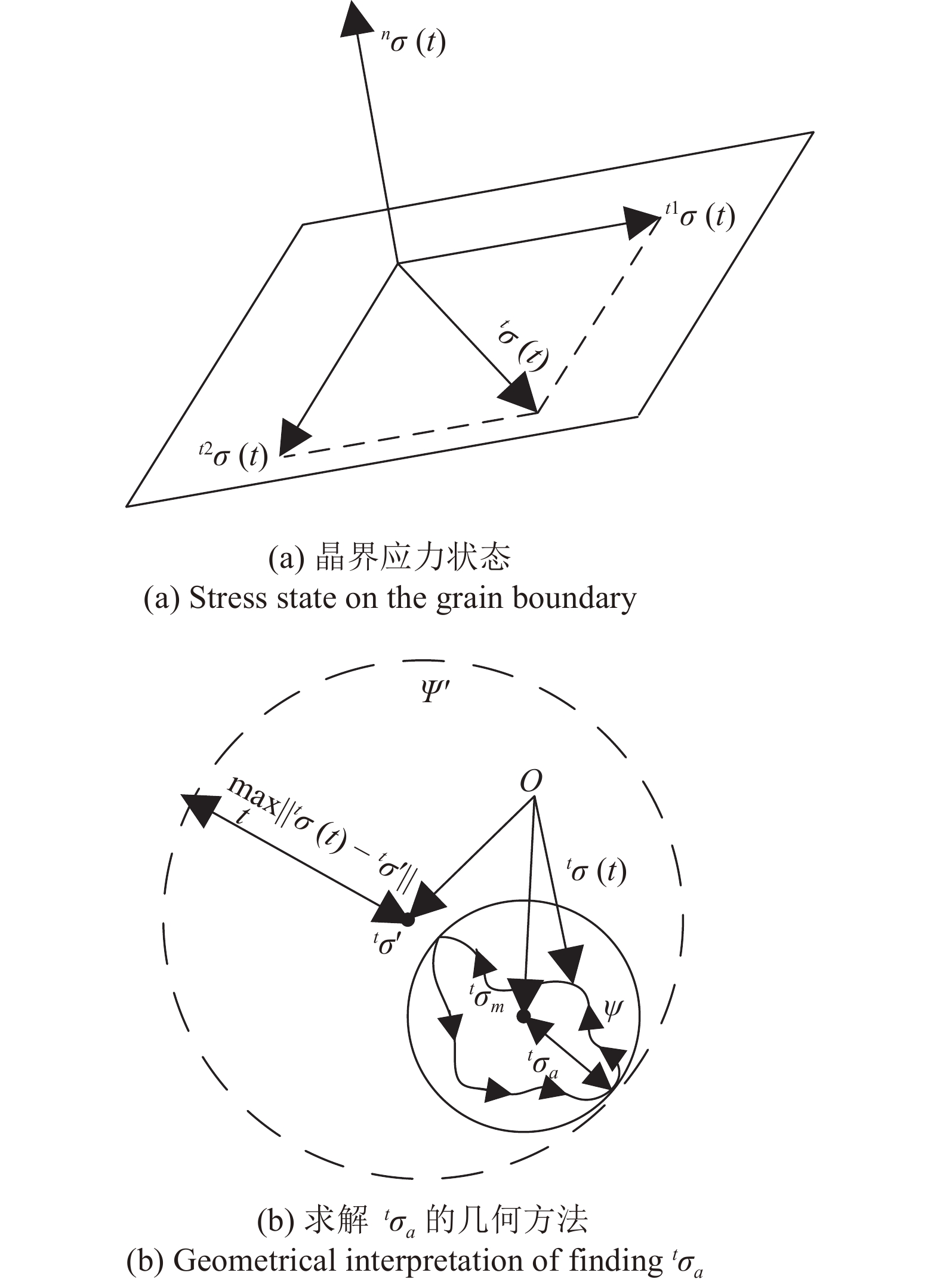
为了研究晶界处的高周疲劳行为, 本文使用了一种新的安定性理论的介观疲劳准则. 该准则假定如果晶界处的应力在介观上处于弹性安定状态, 则晶界上将不会发生疲劳裂纹萌生. 该准则与Dang-Van疲劳准则[22]类似, 区别在于该准则不需要像Dang-Van疲劳准则一样需要宏观介观应力的相互准换, 因为该准则可以直接使用内聚力模型计算出的介观物理量. 该准则为
$$ left. begin{array}{l} {f^{{text{gb}}}} = dfrac{1}{b}leftlangle {{}^t{sigma _a}} ight angle + dfrac{a}{b}mathop {max }limits_t left[ {leftlangle {{}^nsigma (t)} ight angle } ight] leqslant 1 hfill leftlangle {{}^t{sigma _a}} ight angle = dfrac{1}{{{N_b}}}displaystylesumlimits_{s = 1}^{{N_b}} {{}^t{sigma _a}(b)} hfill leftlangle {{}^nsigma (t)} ight angle = dfrac{1}{{{N_b}}}displaystylesumlimits_{b = 1}^{{N_b}} {{}^nsigma (b,t)} hfill end{array} ight} $$  | (19) |
其中








 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
求解

Figure
1.
Illustration of finding

 下载:
下载: 全尺寸图片
幻灯片
2.
多晶模型建立与材料参数确定
2.1
多晶模型建立
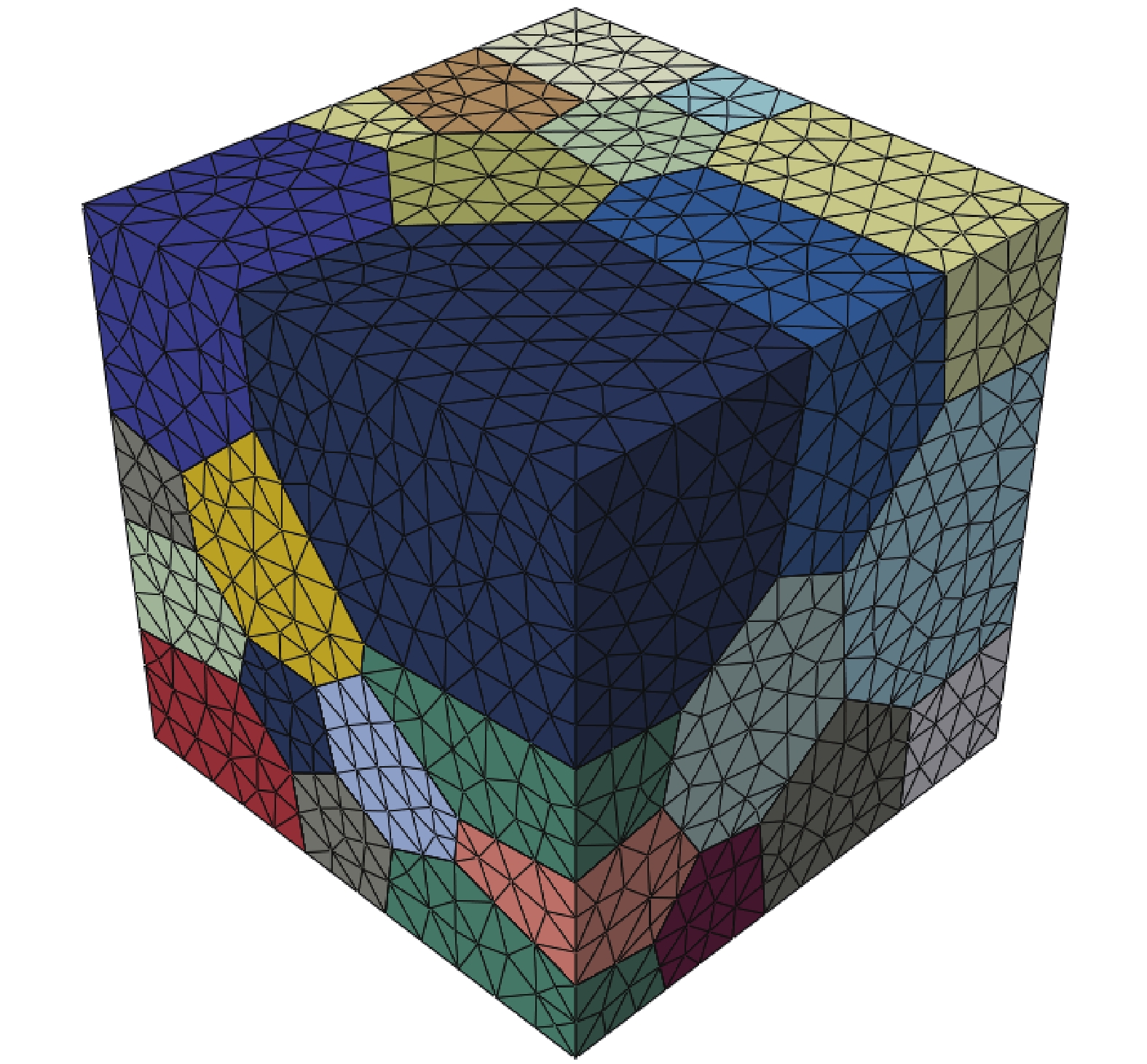
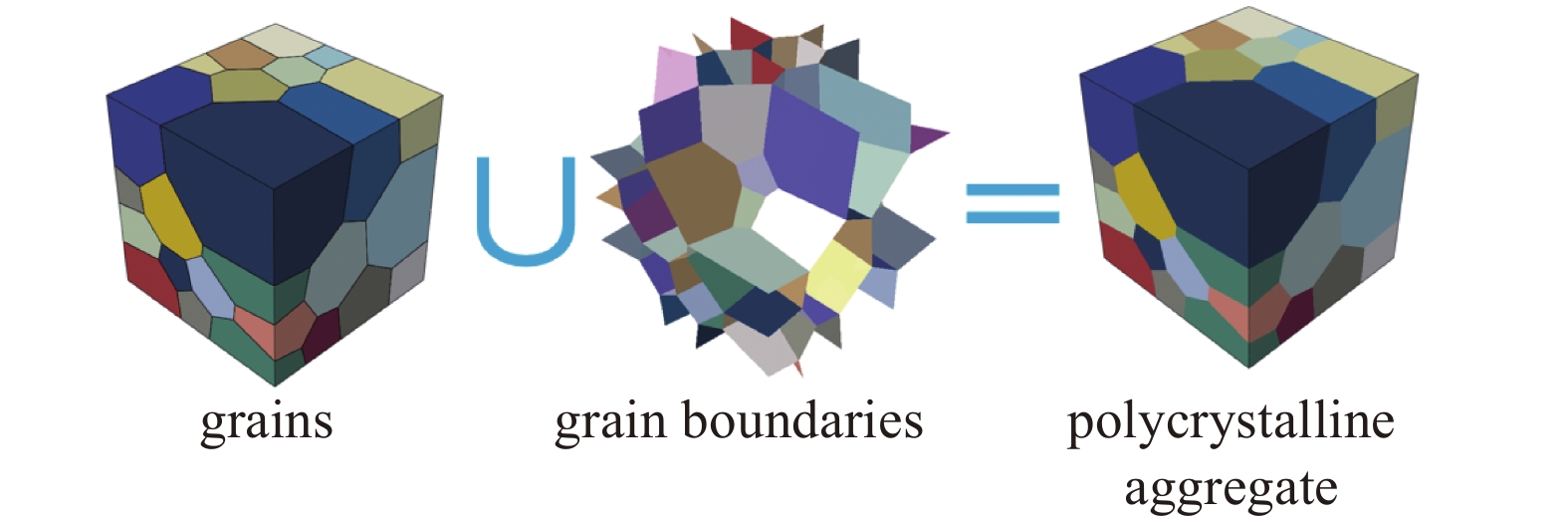
本文研究的选择性激光熔化成形316钢和轧制316钢的晶粒尺寸分别为10.01 μm和4.55 μm[7]. 由于本文采用内聚力模型来模拟晶界处的力学行为, 如果考虑实际的晶粒形貌将会给内聚力单元的建立带来困难. 为了方便起见, 本工作忽略了晶粒形貌的影响, 在晶体塑性仿真中统一将晶粒形貌简化为等轴晶. 本文采用开源软件Neper[24]来生成如图2所示由等轴晶粒组成的代表体单元, 其中Voronoi多面体代表等轴晶粒, 零厚度界面代表晶界. 本文使用四面体单元(C3D4)和三维零厚度内聚力单元(COH3D6)分别划分晶粒网格和晶界网格.
2.2
材料参数优化流程
本文通过拉伸实验的应力应变曲线、微观力学模型计算结果以及反问题优化方法相结合来确定材料本构参数. 本文使用信赖域反射算法[25]来寻找材料参数使得实验获得应力应变曲线与仿真获得应力应变曲线最大程度契合. 定义


ight) $

$$ left. begin{array}{l} {text{find}}:{boldsymbol{p}} = ({h_0},{tau _s},{tau _0},n,q) hfill {text{min}}:Oleft( {boldsymbol{p}} ight) = sumlimits_{i = 1}^n {left| {{sigma _i} - fleft( {{varepsilon _i};{boldsymbol{p}}} ight)} ight|} = left| {{boldsymbol{sigma }} - fleft( {{boldsymbol{varepsilon }},{boldsymbol{p}}} ight)} ight| hfill {text{s}}{text{.t}}{text{.}}:{l_b} leqslant {p_j} leqslant {u_b},;j = 1,2,...,5 hfill end{array} ight} $$  | (20) |
其中ub和lb为模型参数的上界和下界.
2.3
晶粒材料参数
晶粒材料参数由弹性常数和晶体塑性本构参数共同组成. 本节使用代表体单元来模拟拉伸实验曲线从而标定材料参数.
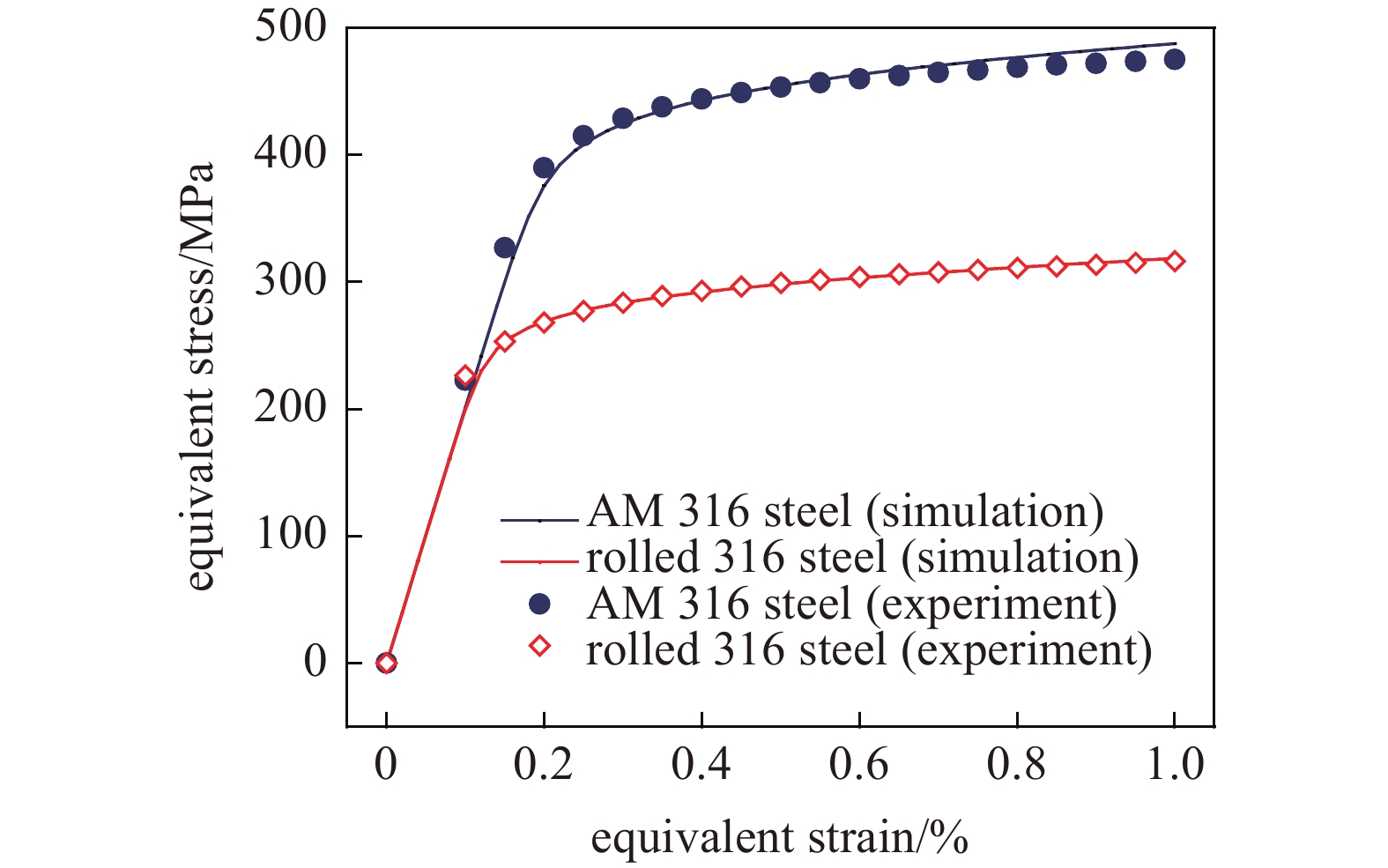
本节计算均采用如图3所示由50个随机取向晶粒组成的代表体单元. 为了避免过刚性响应, 本文在每个晶粒中至少划分20个网格[26]. 为了考虑晶粒尺寸的区别, 本文根据文献[7]中的实验结果分别选取增材制造316钢代表体单元边长和轧制316钢代表体单元边长为37 μm和17 μm. 增材制造316钢和轧制316钢的弹性常数统一选取为Ciiii=206 GPa, Ciijj=206 GPa, Cijij=206 GPa[27]. 对于面心立方金属, 拉伸实验已经足够用来获得晶体塑性本构参数, 在当前参数鉴定流程下不再需要其他实验[28]. 通过周期性边界条件对代表体单元施加宏观应变, 可以很容易计算出代表体单元的平均应力, 结合式(21), 可以得到增材制造316钢和轧制316钢晶体塑性本构参数如表1所示. 如图4所示, 根据优化所得本构参数进行仿真获得的应力应变曲线与实验曲线契合度很高.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
代表体单元
Figure
3.
Representative volume element (RVE)
下载: 全尺寸图片
幻灯片
表
1
通过拉伸实验确定的晶粒材料参数
Table
1.
Material parameters of the grains obtained by the uniaxial tensile experiments
table_type1 ">
| Material | h0/MPa | τs/MPa | τ0/MPa | n | q | ${dot a^{(alpha )}}$ |
| AM 316 steel | 171 | 214 | 156 | 59 | 1.11 | 0.001 |
| rolled 316 steel | 107 | 213 | 99 | 77 | 1.17 | 0.001 |
下载: 导出CSV
|显示表格
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
单轴拉伸实验曲线仿真预测
Figure
4.
Prediction of the uniaxial tensile experiments
下载: 全尺寸图片
幻灯片
2.4
晶界材料参数
本文针对于晶界共有7个材料参数(Kn, Kt, σy0, H, t, δd和δf)需要测定. 晶界的刚度可以定义为
$$ left. {begin{array}{*{20}{l}} {{K_n} = dfrac{{{C_{iiii}}}}{t}} {{K_t} = dfrac{{{K_n}}}{{2(1 + mu )}}} end{array}} ight} $$  | (21) |
其中泊松比μ取为0.3. 在本文采用的基于牵引应力-分离位移描述的内聚力模型中, 晶界本构厚度t对牵引应力和分离应变之间的关系没有影响. 另外由于内聚力单元的刚度很弱, 晶界厚度对多晶体有限元计算结果的影响也很弱. 如果选取一个很小的晶界厚度, 不但计算结果几乎不受影响, 还会大大减少计算效率. 因此本文选取1 μm作为晶界的厚度. 为了方便起见, 本文选取拉伸应力应变曲线残余应变为0.2%, 对应的应力为初始屈服应力σy0. 线性硬化模量H通过应变强化阶段的斜率来确定. 由于本文仅考虑裂纹初始前的状态, 因此δd和δf控制的损伤演化阶段对结算结果没有影响. 综上所述, 弹塑性内聚力模型的材料参数如表2所示.
表
2
晶界材料参数
Table
2.
Material parameters of the grain boundaries
table_type2 ">
| Material | Kn/(GPa·μm?1) | Kt/(GPa·μm?1) | σy0/MPa | H/(MPa·μm?1) | δd/μm | δf/μm | t/μm |
| AM 316 steel | 206 | 79.23 | 445 | 1074 | 0.05 | 0.1 | 1 |
| rolled 316 steel | 206 | 79.23 | 285 | 945 | 0.05 | 0.1 | 1 |
下载: 导出CSV
|显示表格
3.
仿真结果与讨论
本节将晶体塑性理论、弹塑性内聚力模型以及分别针对于晶粒和晶界的介观疲劳准则相结合以研究增材制造316钢和轧制316钢的高周疲劳性能.
本节采用表1和表2中的材料参数进行数值仿真. 如图2所示, 代表体单元由50个晶粒和218个晶界组成. 与前文相同, 增材制造316钢和轧制316钢的代表体单元边长分别取37 μm和17 μm. 通过一般性周期性边界条件[29]对代表体单元施加幅值为250 MPa、应力比为0的循环应力载荷. 为了节约计算时间, 本节模拟10个循环周期以使代表体单元在介观下达到弹性安定状态. 结合文中所述两种介观疲劳准则即可解分别求得晶粒和晶界的疲劳因子. 对于增材制造316钢, 晶粒和晶界疲劳因子fgrain和fgb分别为0.617和0.306. 对于轧制316钢, 晶粒和晶界疲劳因子fgrain和fgb分别为0.659和0.340. 显然, 无论是晶粒疲劳因子和晶界疲劳因子, 轧制316钢的计算结果皆大于增材制造316钢. 这说明增材制造316钢相较于轧制316钢具有更好的高周疲劳性能, 这与文献[7]中的实验结果相符.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
多晶集的微观结构
Figure
2.
Microstructure of the polycrystalline aggregate
下载: 全尺寸图片
幻灯片
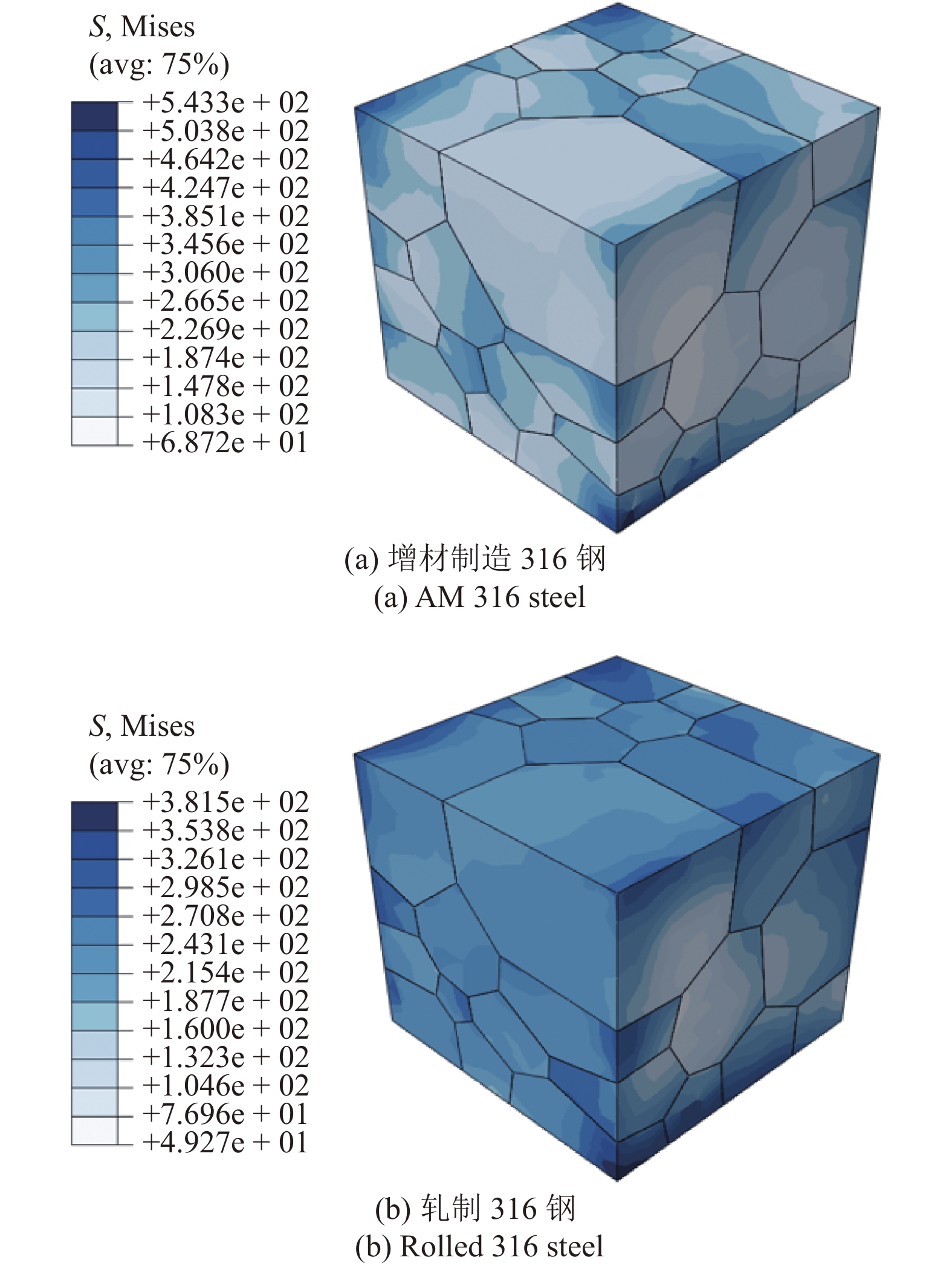
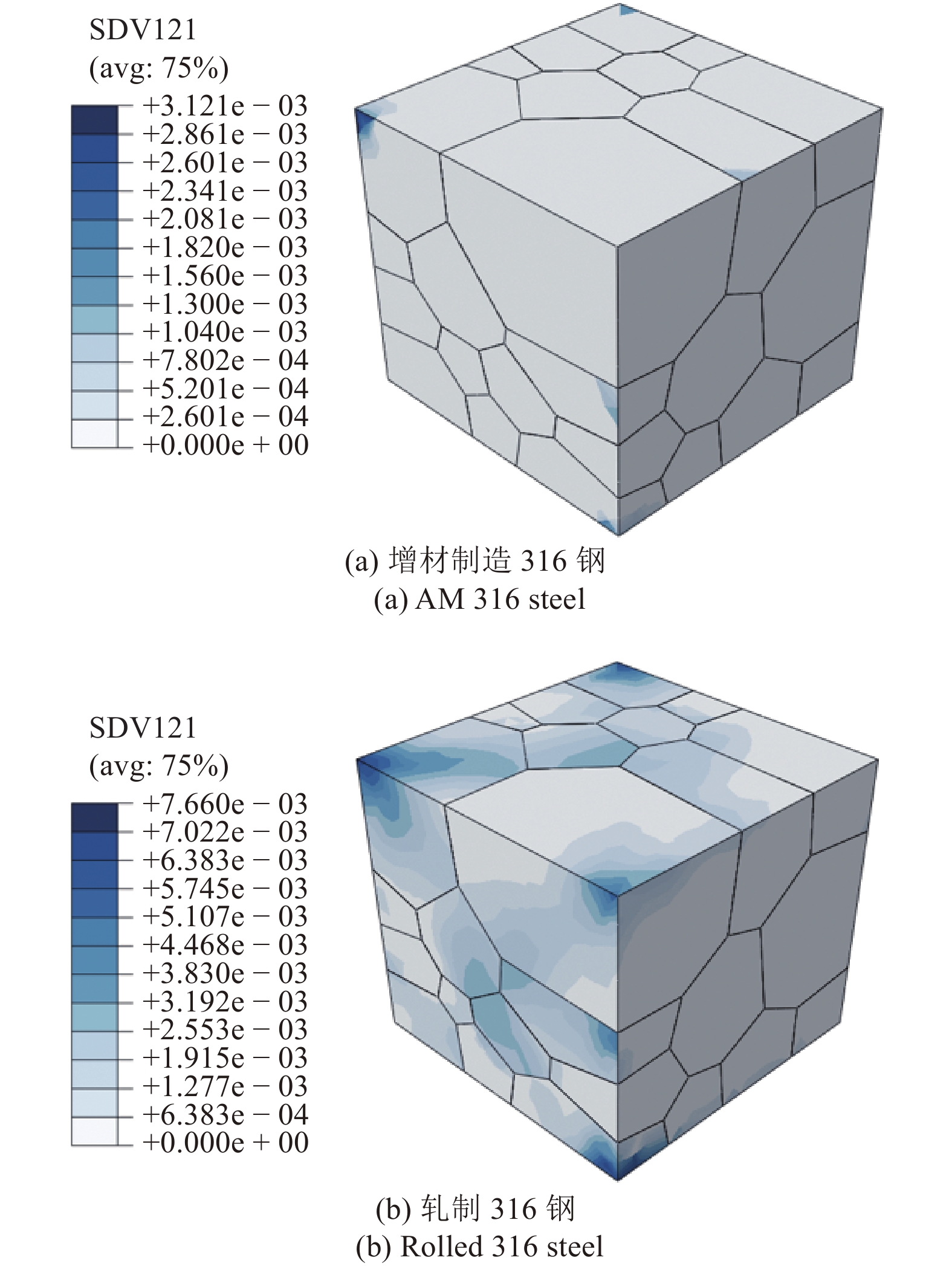
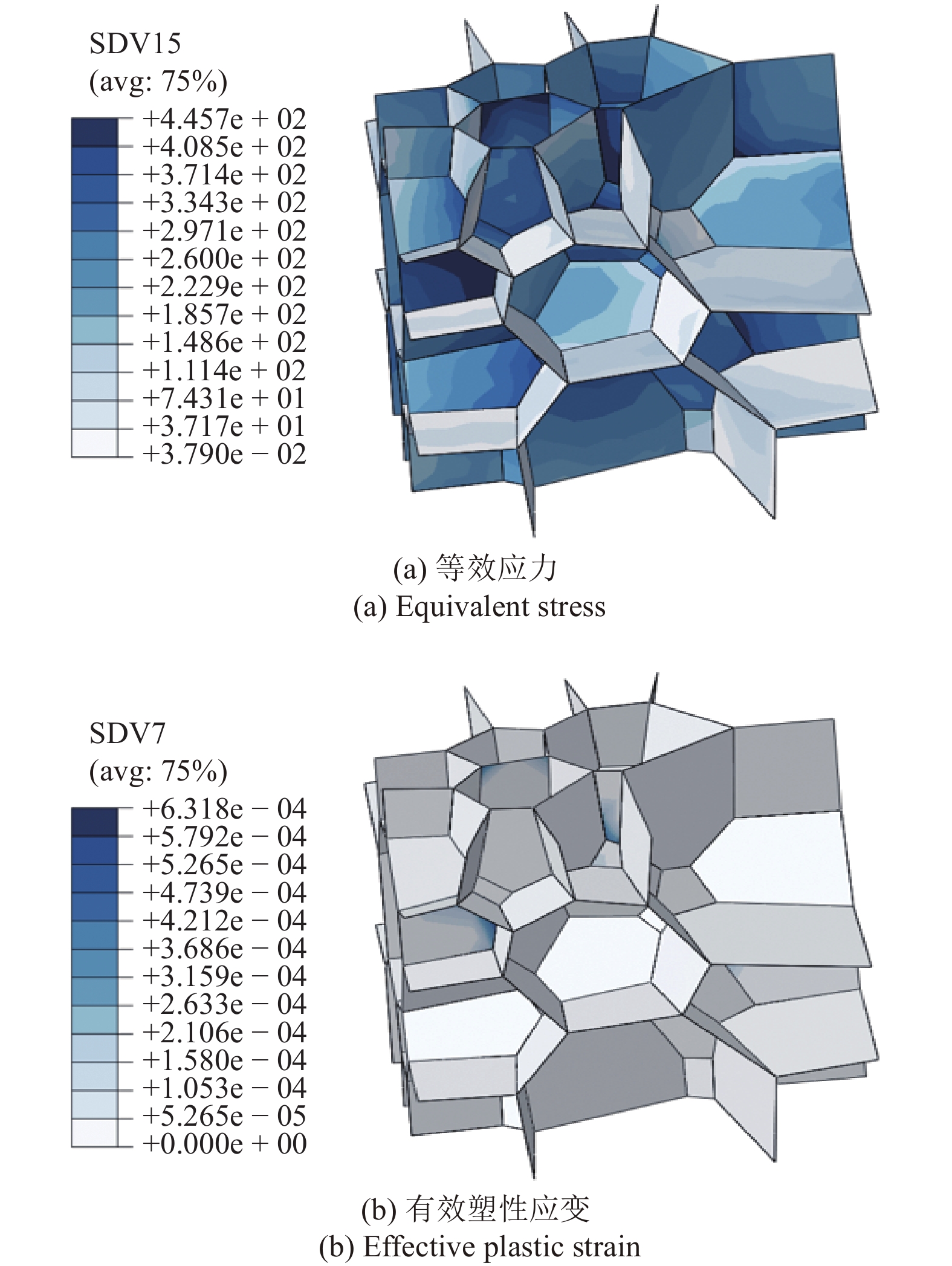
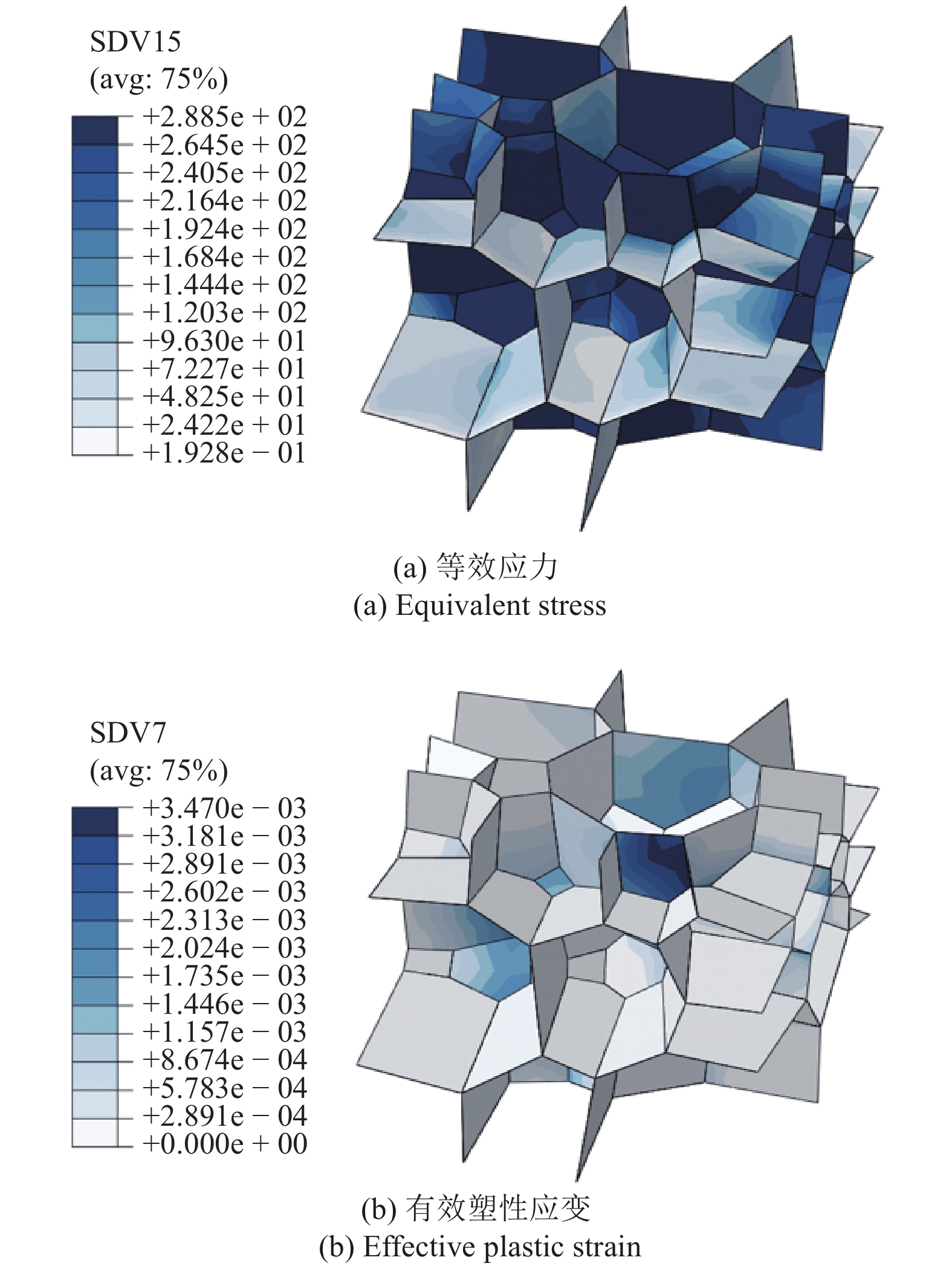
接下来本文将根据图5所示增材制造316钢和轧制316钢晶粒内部的Mises等效应力、图6所示增材制造316钢和轧制316钢晶粒内部的累积剪切应变、图7所示的增材制造316钢晶界处的等效应力和等效塑性应变以及图8所示的轧制316钢晶界处的等效应力和等效塑性应变来解释上述仿真结果. 首先对于晶粒部分, 增材制造316钢晶粒中的最大正应力以及切应力幅值的均值为95.88 MPa和59.87 MPa, 相较于轧制316钢对应值98.96 MPa和63.96 MPa更小. 结合式(18), 显然增材制造316钢的晶粒疲劳因子会小于轧制316钢的晶粒疲劳因子. 值得一提的是, 尽管增材制造316钢的最大Mises等效应力543.3 MPa大于轧制316钢的最大Mises等效应力381.5 MPa(图5所示), 增材制造316钢中Papadopoulos疲劳准则涉及的介观最大正应力和切应力幅值却小于轧制316钢所对应的值. 另外, 增材制造316钢中累积剪切应变的最大值3.121 × 10?3也小于轧制316钢中累积剪切应变的最大值7.660 × 10?3. 一般来说, 大的应力更容易产生位错[30]. 而位于驻留滑移带和基底界面处的位错是疲劳裂纹萌生的主要成因[7]. 因此材料中一般应力越小疲劳性能越好. 然而, 尽管Papadopoulos疲劳准则中所涉及的物理量是与应力相关的, 具有更大Mises等效应力的增材制造316钢与轧制316钢相比却拥有更小的晶粒疲劳因子. 这是由于基于弹性安定理论的Papadopoulos疲劳准则可以有效考虑晶粒内部的局部塑性滑移.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-5.jpg'" class="figure_img
figure_type1 bbb " id="Figure5" />
图
5
晶粒内部的Mises等效应力
Figure
5.
von Mises equivalent stress in the grains
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
晶粒内部的累积剪切应变
Figure
6.
Total cumulative shear strain in the grains
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-7.jpg'" class="figure_img
figure_type1 bbb " id="Figure7" />
图
7
增材制造316钢晶界
Figure
7.
Grain boundary of AM 316 steel
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-396-8.jpg'" class="figure_img
figure_type1 bbb " id="Figure8" />
图
8
轧制316钢晶界
Figure
8.
Grain boundary of rolled 316 steel
下载: 全尺寸图片
幻灯片
接下来针对于晶界部分, 尽管增材制造316钢晶界处的最大等效应力值445.7MPa大于轧制316钢晶界中对应值288.5 MPa, 增材制造316钢晶界处的有效塑性应变

根据本文提出的微观力学模型得到的仿真结果与文献[7]中的实验结果相符. 针对于晶界的介观疲劳准则可以有效地反映出局部塑性对高周疲劳性能的影响. 结合晶体塑性理论和Papadopoulos疲劳准则可以考虑位错滑移对晶粒高周疲劳性能的影响. 本文建立的微观结构-疲劳性能之间关系可以日后应用于增材制造316钢的疲劳性能优化.
4.
结论
本文通过微观力学方法研究了增材制造316钢和轧制316钢的高周疲劳性能. 为了考虑发生于晶粒与晶界中局部塑性的影响, 分别使用晶体塑性理论与弹塑性内聚力模型来模拟晶粒和晶界的力学行为. 为了同时研究滑移带和晶界对疲劳裂纹初始的影响, 分别使用了Papadopoulos疲劳准则和一种基于安定性理论的介观高周疲劳准则.
仿真结果显示选择性激光熔化316钢相较于轧制316钢具有更好的高周疲劳性能, 这与文献中的疲劳实验数据相吻合. 同时仿真结果也证明了所使用的晶界高周疲劳准则可以有效反映局部塑性对高周疲劳性能的影响. 本文建立的微观结构?疲劳性能之间关系可以日后应用于选择性激光熔化316钢的疲劳性能优化.
