引言
当机翼处于大迎角时, 机翼边界层无法克服逆压梯度, 机翼绕流流场发生了流动分离, 使得机翼的升力降低、阻力增加, 从而引起机身、舵面等发生振动. 自普朗特提出边界层理论以来, 抑制机翼分离流的研究就从未停止过[1-9]. 各国投入大量的人力、财力去开展机翼分离流控制研究, 力争通过提升机翼的气动性能, 增加机翼可用迎角与可用升力, 实现飞机短距起降, 代替传统增升装置, 摆脱传统飞机设计的束缚, 取得革新.
介质阻挡放电(dielectric barrier discharge, DBD)等离子体流动控制技术作为一种典型的主动, 流动控制技术, 因具有响应迅速、工作稳定、结构简单等突出优点, 为抑制气流分离、推迟机翼失速迎角、提升机翼气动性能提供了重要技术支撑[10-13].
在国外, 美国和俄罗斯等航空大国有固定的研究人员持续开展该领域研究. 美国圣母大学的Kelley等[14]通过采用陶瓷作为翼型材料,对激励器施加30 kV正弦高压等方式, 在Re = 2.3 × 106的情况下, 实现了翼型分离流控制. 莫斯科物理技术研究院通过采用纳秒脉冲激励的方式, 在Ma = 0.85的情况下, 抑制了翼型气流分离[15]. 在欧洲, 以发展“绿色航空”为牵引, 流动控制委员会组织了数十所高校, 针对机翼分离流问题, 开展了深入研究, 探索了分离流等离子体控制机理, 摸清了激励参数对控制效果的影响规律[16]. 在亚洲, 新加坡国立大学的郑建国等[17]指出纳秒脉冲等离子体激励器产生的诱导热是翼型分离流控制的关键. 日本航天科学研究所的Sato等[18]通过数值模拟方法分析了不同雷诺数下激励器的最优激励频率与翼型前缘分离剪切层之间的耦合关系.
在国内, 研究人员通过采用数值模拟[19-25]、风洞实验[26-33]、飞行验证[34-35]等方式, 深入开展了基于等离子体激励的机翼分离流控制研究, 拓展了等离子体激励器可控风速[36]与可控雷诺数[37], 提高了技术成熟度, 为该技术的工程化应用奠定了重要技术基础.
尽管在流动控制机理分析、高风速及高雷诺数下等离子体控制效果方面取得了重要进展, 但机翼的尺度较小, 展长一般不超过1 m. 而真实飞行器的翼展多在10 m以上. 因此, 分析机翼尺度效应对分离流等离子体流动控制的影响规律, 掌握等离子体控制机理, 提升等离子体对大尺度模型的控制效果, 是推动等离子体流动控制技术实现工程化应用的关键之一.
本文采用测力与粒子图像测速仪(particle image velocimetry, PIV)相结合的方法, 针对不同尺度的机翼开展了分离流等离子体控制研究, 引入能效比系数公式分析了尺度效应对控制效果的影响规律, 探索了等离子体流动控制机理, 为开展全尺寸飞机等离子体流动控制研究提供技术支撑.
1.
实验系统
1.1
对称布局DBD等离子体激励器
图1给出了对称布局等离子体激励器布置示意图. 如图1所示, 激励器主要包括两层电极、绝缘介质和激励电源3部分. 目前常采用正弦交流、纳秒脉冲和微秒脉冲3种高压电源产生等离子体. 不同的激励电源会产生不同的诱导流场. 本文仅采用正弦交流电源作为激励电源. 实验时, 上层电极与正弦交流电源相连, 下层电极接地. 下层电极的宽度覆盖上层电极的两端. 两层电极之间由绝缘介质隔开. 当电压超过一定幅值时, 上层电极周围的空气被电离, 从而产生带电粒子. 在电场的作用下, 这些带电粒子在定向运动的过程中与中性分子发生碰撞, 从而诱导产生射流[38-41]. 在实验结果部分, 本文会对激励器诱导流场特性进行分析.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
对称布局等离子体激励器布局示意图
Figure
1.
Configuration of symmetrical DBD plasma actuator
 下载:
下载: 全尺寸图片
幻灯片
1.2
激励器诱导流场特性实验设置
本文采用正弦交流对称布局激励器开展研究. 采用铜箔胶带作为电极. 上、下两层电极的厚度为0.05 mm, 两层电极的几何中心重合. 上层电极的宽度为2 mm, 下层电极的宽度为5 mm. 采用厚度为0.1 mm的聚酰亚胺胶带作为绝缘介质.
采用由西安浩宁电子科技有限公司生产的高压交流电源开展实验. 该电源的电压峰峰值为0 ~ 20 kV, 频率范围为0.1 ~ 6 kHz. 本文采用连续激励的模式开展实验研究, 占空比为100%.
采用LAVISION公司生产的高频PIV系统开展实验. 相机分辨率为1024 × 1024像素, 视场大小为70 mm × 70 mm, 采集频率为1.8 kHz, 采集时间为2 s. 激光器的最高工作频率为20 kHz, 单脉冲能量为30 mJ.
实验时, 将布置有等离子体激励器的平板模型放置在尺寸为800 mm × 600 mm × 600 mm (长 × 宽 × 高)的封闭箱体内. 通过预留的走线孔将高压线缆引入箱体内部并通过线缆连接交流电源与激励器. 实验前, 通过进气口将橄榄油示踪粒子注入到箱体内. 随后, 通过盖板将进气口封闭. 当粒子分布均匀后, 再开展实验. 采用Davis10.0软件对原始图像进行互相关处理. 运算窗口为32 × 32像素, 重叠量为50%, 速度误差小于3%.
1.3
风洞介绍
1.3.1
小尺度模型实验所用风洞
小尺度机翼实验在中国空气动力研究与发展中心(以下简称: 气动中心)的电空气动力学研究型低速风洞中进行. 该风洞是一座开口直流式风洞, 主要由收缩段、扩散段、驻室和风机等部分组成. 试验段尺寸为750 mm × 750 mm × 1050 mm, 风洞全长为11.5 m. 稳定风速范围 2 ~ 55 m/s, 湍流度小于0.3%.
1.3.2
大尺度模型实验所用风洞
为了提高机翼尺度, 在气动中心Φ3.2 m低速风洞开展了大尺度机翼风洞实验. 该风洞是一座单回流式低速风洞. 实验段为开口射流区, 直径为3.2 m, 长度为5 m. 实验段稳定风速范围为8 ~ 115 m/s, 湍流度小于0.3%.
1.4
实验模型介绍
1.4.1
小尺度模型实验所用模型及支撑装置
采用超临界机翼(翼型剖面为SC(2)-0714)开展小尺度模型等离子体流动控制研究. 模型由铝制成. 机翼的前缘后掠角为25°, 平均气动弦长为100 mm, 展长为380 mm. 如图2所示, 采用竖直方式安装机翼. 通过支杆将模型与天平进行连接. 由于部分支杆会暴露在流场中, 因此采用整流罩的方式降低支杆带来的实验误差. 通过转盘的转动实现模型迎角的变化. 角度控制机构的精度优于0.05°.
采用应变天平开展测力实验. 实验前, 通过天平校准架对该天平进行静态标定. 表1给出了静态标定结果.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
小尺度机翼测力实验的设备布置图
Figure
2.
Sketch of the force measurement setup for small size wing
下载: 全尺寸图片
幻灯片
表
1
应变天平静态标定结果
Table
1.
Static calibration results of balance
table_type1 ">
| Component of balance | x axis | y axis |
| design load/N | 180 | 35 |
| calibration load/N | 180 | 35 |
| accuracy/% | 0.030 | 0.030 |
| precision/% | 0.018 | 0.018 |
下载: 导出CSV
|显示表格
实验时, 采用采样前延时10 s, 采样时间为10 s, 采样频率为每通道100 Hz的方式进行数据采集. 通过开展重复性实验, 获得气动力精度. 在实验风速范围内, 升力系数的精度优于0.002, 阻力系数的精度优于0.000 5. 由于本文主要关注施加等离子体激励前后的升阻力差量, 因此未对测力数据进行修正.
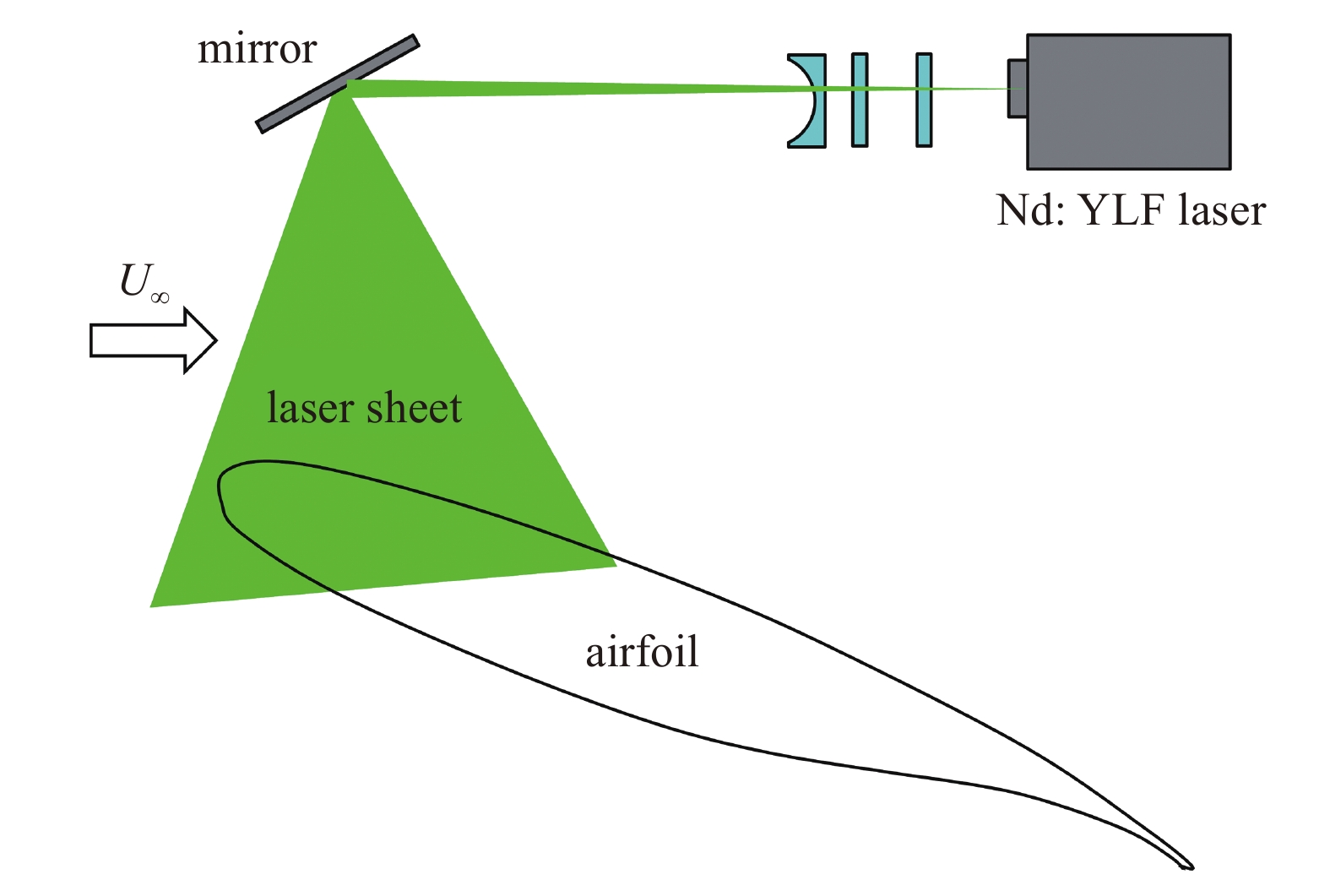
在开展PIV实验时, 激光器布置在风洞侧面, 激光片光与机翼弦向平面重合, 定位于机翼中截面. CCD相机布置在风洞顶端, 摄像头轴线与激光片光垂直相交于测量平面,如图3和图4所示.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
小尺度机翼PIV实验的设备布置图
Figure
3.
Schematic of the PIV experimental setup for small size wing
下载: 全尺寸图片
幻灯片
采用整个金属模型作为下层电极的方式开展等离子体流动控制. 上层电极为铜箔胶带, 宽度为2 mm,展向长度为200 mm. 上层电极的中心与翼型前缘重合.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
布置在机翼上的激励器布局示意图
Figure
4.
Layout diagram of DBD plasma actuator arranged on the wing
下载: 全尺寸图片
幻灯片
1.4.2
大尺度模型实验所用模型及支撑装置
如图5所示, 采用半模实验装置开展实验. 通过连接件将天平与模型相连. 借助风洞下转盘实现迎角变化. 该装置的迎角范围: 0 ~ 360°, 精度优于0.02°. 通过垫块的方式减少边界层对测量结果的影响. 垫块与模型之间通过迷宫槽进行密封.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-5.jpg'" class="figure_img
figure_type1 bbb " id="Figure5" />
图
5
大尺度机翼测力实验的设备布置图
Figure
5.
Schematic of the force measurement setup for large size wing
下载: 全尺寸图片
幻灯片
采用与小尺度机翼相同的翼型剖面加工实验模型. 机翼由铝制成. 机翼的平均气动弦长为500 mm, 展长为1900 mm, 其几何尺寸刚好为小尺度机翼的5倍. 激励器布置形式与小尺度机翼实验相同, 采用整个金属模型作为下层电极的方式开展等离子体流动控制. 上层电极为铜箔胶带, 宽度为2 mm, 展向长度为1000 mm. 上层电极的中心与翼型前缘重合.
采用BM500半模盒式应变天平开展实验. 实验前, 通过天平校准架对该天平进行了静态校准, 标定结果如表2所示.
表
2
BM500应变天平静态标定结果
Table
2.
Static calibration results of BM500 balance
table_type1 ">
| Component of balance | x axis | y axis |
| design load/N | 3300 | 10000 |
| calibration load/N | 3750 | 10000 |
| accuracy/% | 0.05 | 0.05 |
| precision/% | 0.018 | 0.018 |
下载: 导出CSV
|显示表格
2.
实验结果与分析
2.1
静止空气下激励器特性研究
图6给出了对称布局激励器诱导流场的时均速度场. 将上层电极的中心作为坐标原点. 实验时, 将采集2 s的数据进行平均, 从而获得诱导流场的平均速度. 由图6可知, (1)激励器产生的射流与经典射流类似. 但不同的是, 等离子体激励器诱导射流并没有向流场内注入额外的质量流量. 激励器通过在壁面附近诱导产生等离子体, 排开壁面的空气, 使得壁面压力降低, 从而将上层电极上方的空气“拉拽”到壁面, 形成射流. 整个封闭空间内的质量流量并未增加; (2)由于采用对称布局的形式, 因此激励器在上层电极的两侧产生两股速度近似相等, 方向相反的射流[42]; (3)在黏性力的作用下, 随着切向距离的增加, 射流的厚度逐渐增大.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
静止空气下对称布局激励器诱导流场的时均速度场
Figure
6.
Time-averaged velocity field generated by the symmetrical DBD plasma actuator in quiescent air
下载: 全尺寸图片
幻灯片
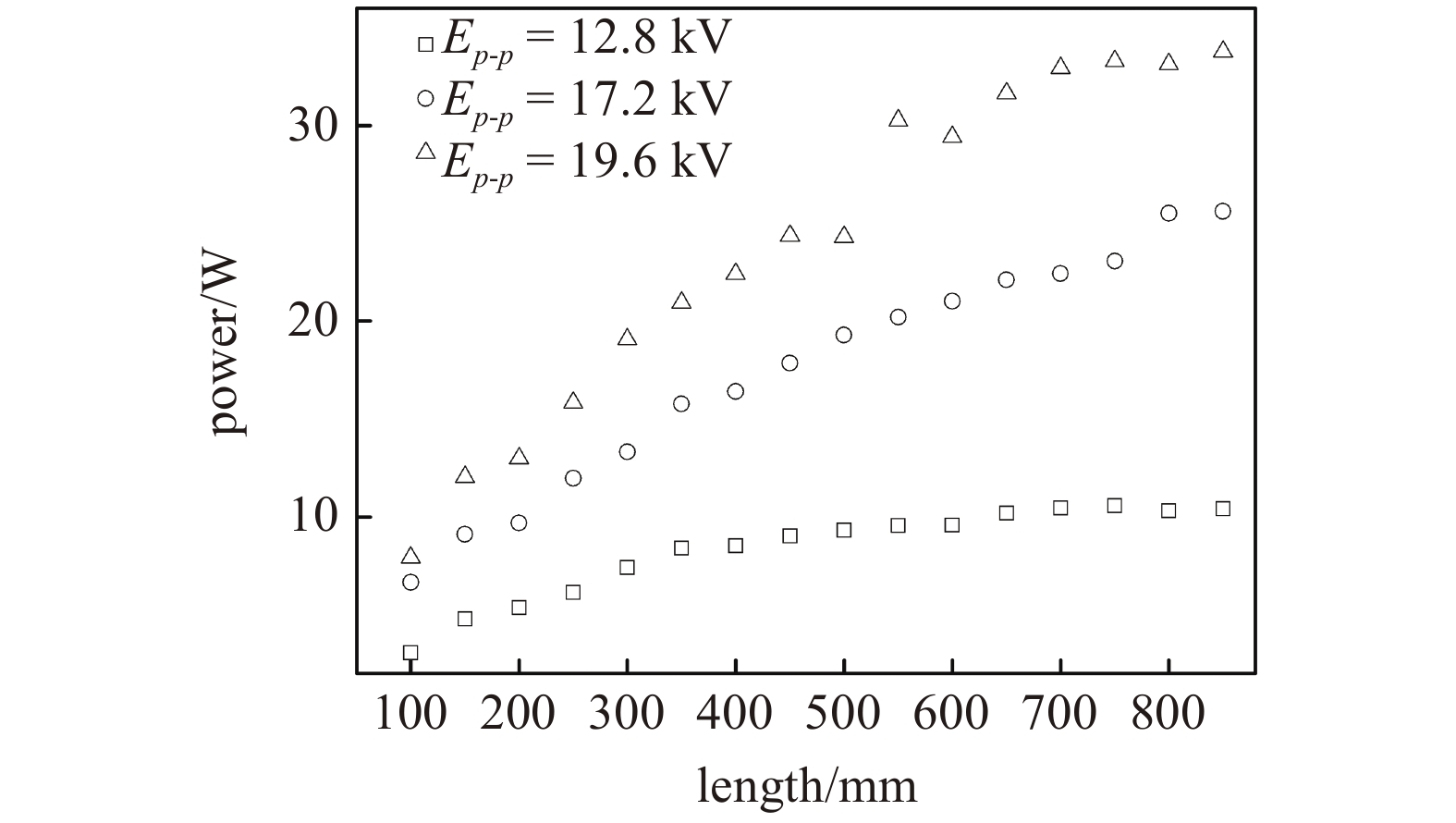
激励器的消耗功率影响着等离子体流动控制技术的经济性与应用前景. 当机翼尺度增大时, 电极沿展向的布置长度增加. 为了在大尺度机翼上实现分离流控制, 分析了激励器的平均消耗功率随电极长度的变化情况. 实验时, 通过泰克P6015A高压探针与泰克TCP0030A电流探针测量获得多个周期内的电压幅值与电流, 然后将多个周期内的功率之和进行平均, 从而获得激励器平均功率[43].
如图7所示, 在不同电压下, 随着电极长度的增加, 激励器消耗功率逐渐增大; 其次, 在本文研究的参数范围内, 激励器消耗功率的增长率随着电极长度的增加而逐渐减小. 当电极长度达到一定阈值时, 激励器消耗功率将不再增加. 阈值的大小与电压、频率等激励参数有关. 这种影响规律为开展大尺度模型等离子体流动控制提供了有力条件. 即使模型尺度再大, 电极长度再长, 激励器消耗功率也不会随电极长度的增长而无限增加.
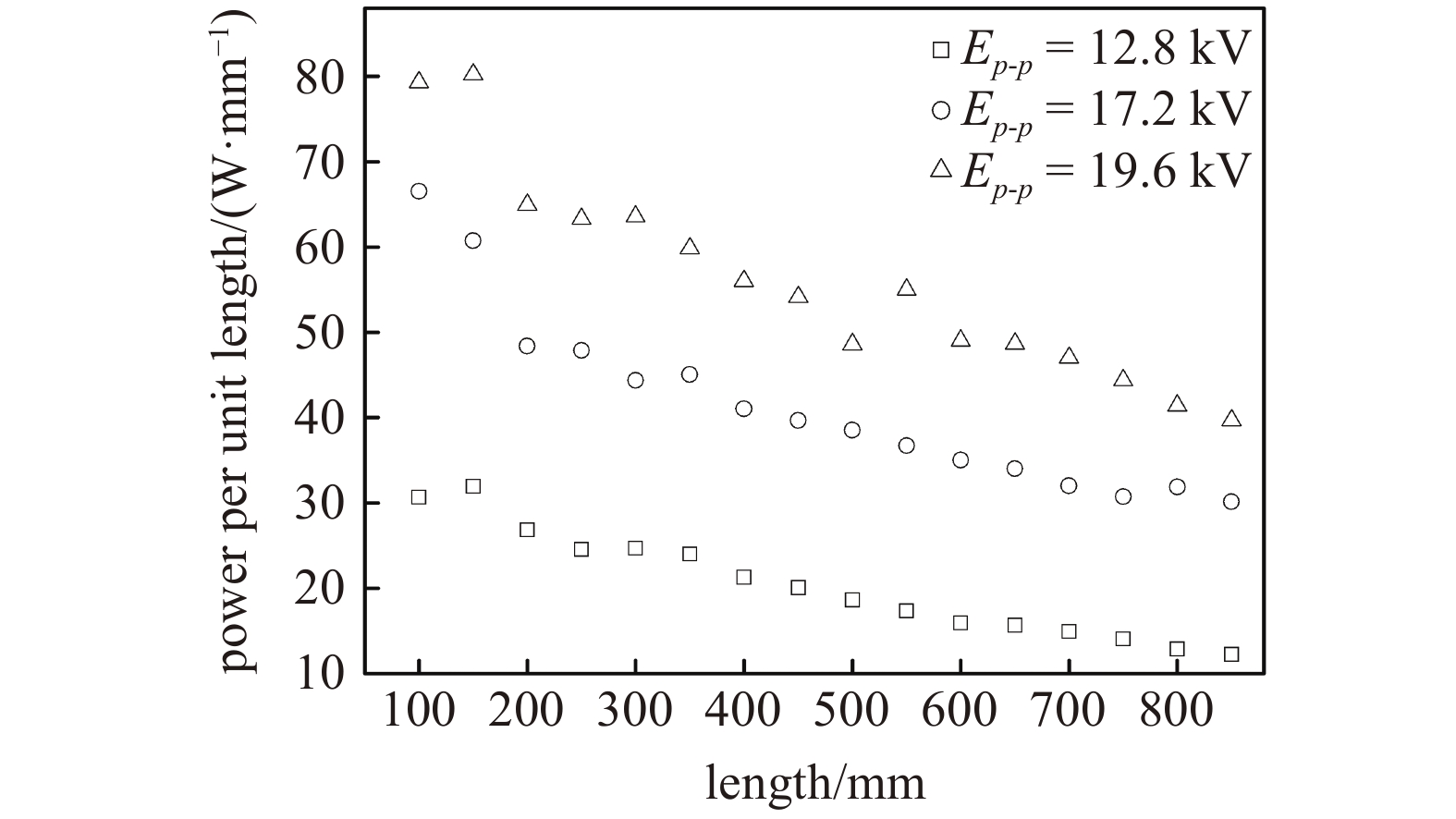
图8给出了3种激励电压下, 单位长度内激励器消耗功率随电极长度变化情况. 从图8可以看出, 随着电极长度的增加, 单位长度内的激励器消耗功率逐渐减小. 该结果与图7的变化规律吻合较好.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-7.jpg'" class="figure_img
figure_type1 bbb " id="Figure7" />
图
7
激励器消耗功率随电极长度的变化情况
Figure
7.
Power consumption of plasma actuator versus the length of electrodes
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-8.jpg'" class="figure_img
figure_type1 bbb " id="Figure8" />
图
8
单位长度内激励器消耗功率随电极长度的变化情况
Figure
8.
Power consumption of plasma actuator in unit length versus the length of electrodes
下载: 全尺寸图片
幻灯片
2.2
小尺度机翼风洞实验结果
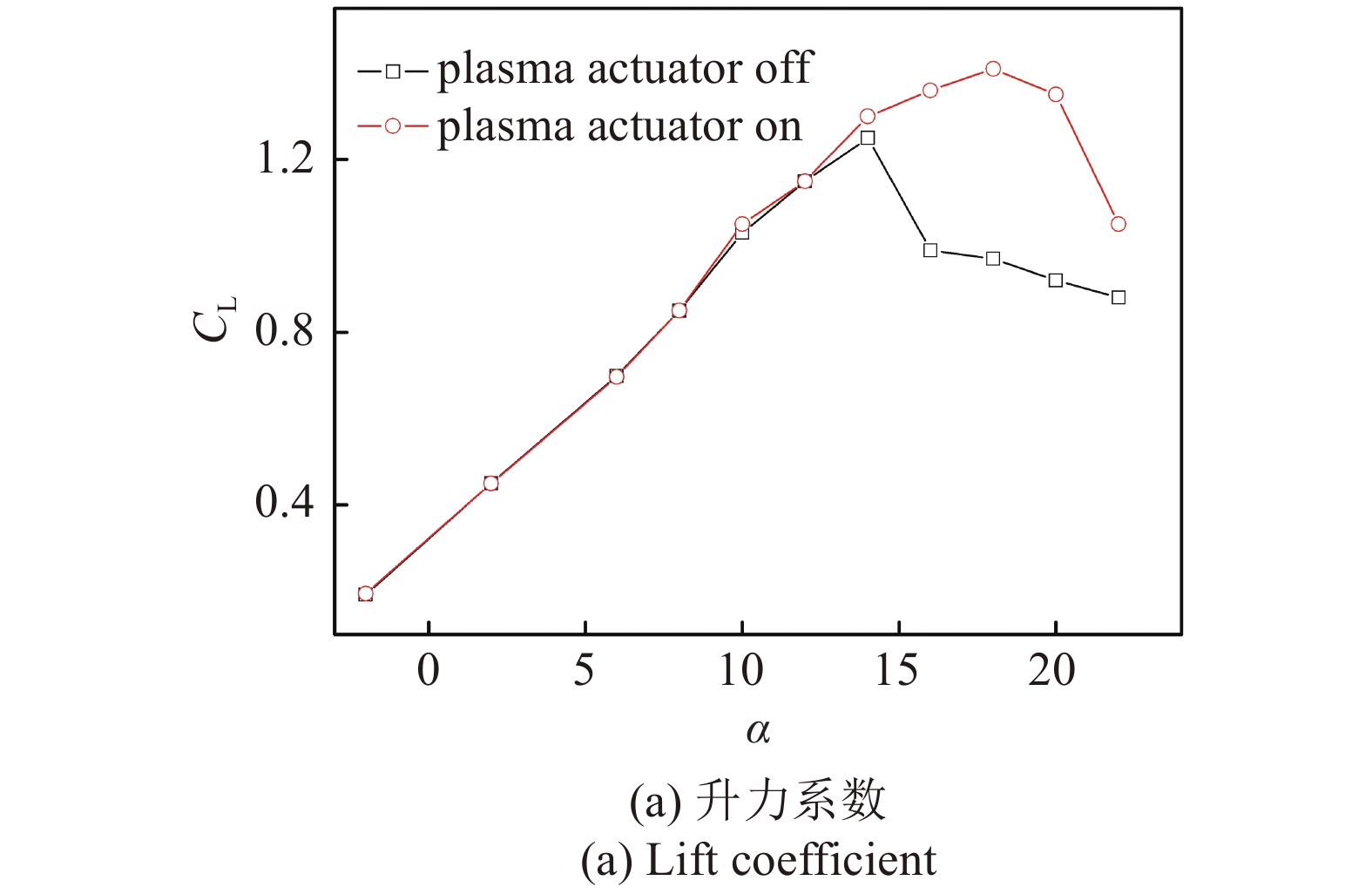
在掌握激励器特性的基础上, 开展了小尺度机翼风洞实验. 图9给出了在Re = 3.30 × 105 (U∞ = 50 m/s)的情况下, 施加激励前后, 小尺度机翼升力系数及阻力系数随迎角变化情况. 由图9可知, 当激励器布置在机翼前缘时, 等离子体激励对线性段的升力系数影响较小; 等离子体控制效果主要表现为推迟失速迎角、提高最大升力系数、减小失速区的阻力系数. 施加激励后, 失速迎角推迟了4°, 最大升力系数提高了12.8%.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-9-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-9-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure9-1" />
9
施加激励前后小尺度机翼升力系数与阻力系数随迎角的变化情况
9.
Lift coefficient and drag coefficient of small size wing versus angle of attack with plasma actuation off and on.
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-9.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-9.jpg'" class="figure_img
figure_type1 bbb " id="Figure9" />
图
9
施加激励前后小尺度机翼升力系数与阻力系数随迎角的变化情况(续)
Figure
9.
Lift coefficient and drag coefficient of small size wing versus angle of attack with plasma actuation off and on (continued)
下载: 全尺寸图片
幻灯片
2.3
大尺度机翼风洞实验结果
在完成小尺度机翼风洞实验的基础上, 开展了大尺度机翼的风洞实验研究. 两次风洞实验的雷诺数相同, 风速不同.
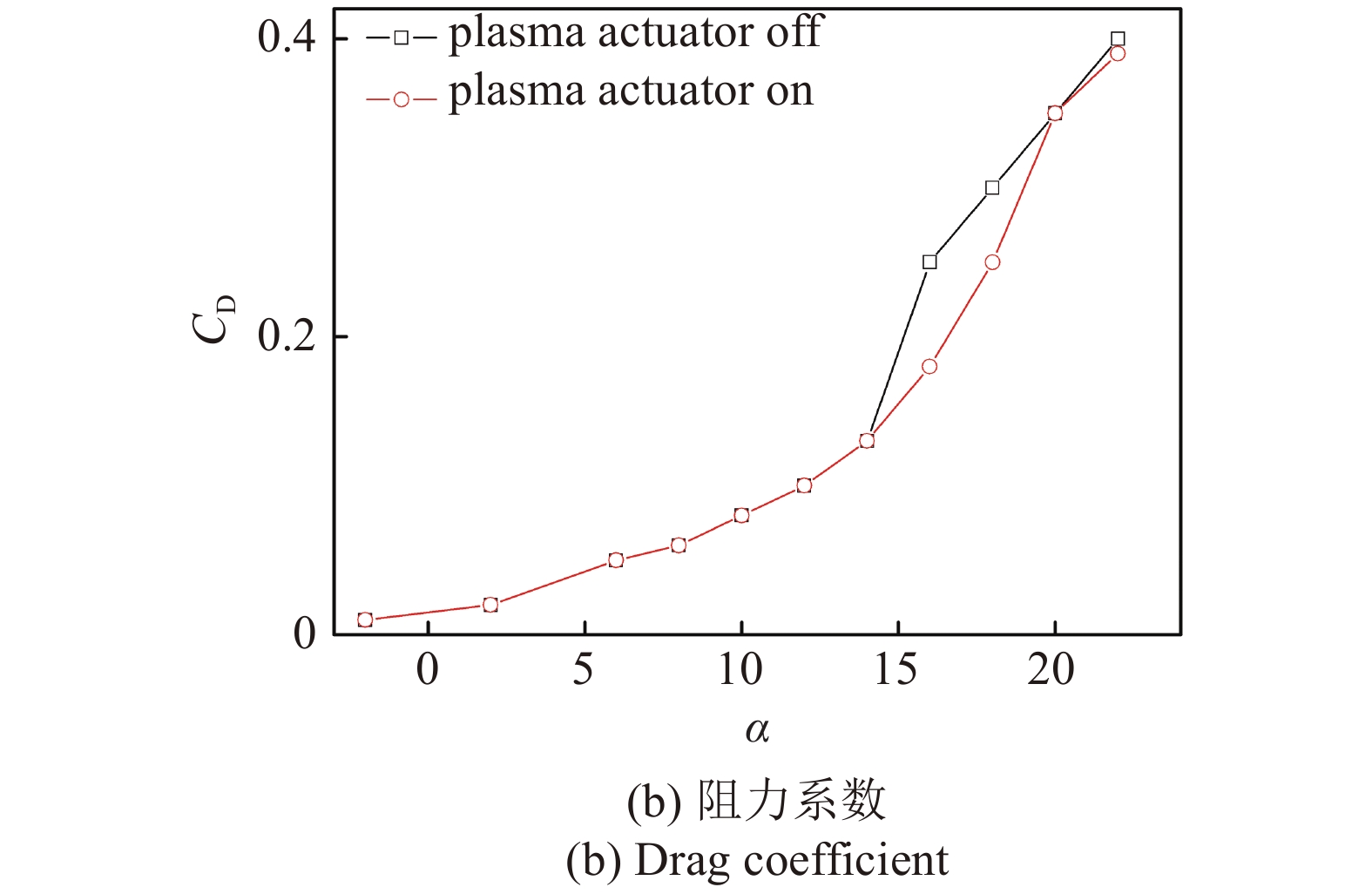
图10给出了在Re = 3.30 × 105 (U∞ = 10 m/s)的情况下, 施加激励前后, 大尺度机翼升力系数及阻力系数随迎角变化情况. 与小尺度机翼实验类似, 等离子体激励推迟了机翼失速迎角, 提高了最大升力系数. 结果表明, 施加等离子体控制后, 失速迎角推迟了4°, 最大升力系数提高了17.3%.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-10.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-10.jpg'" class="figure_img
figure_type1 bbb " id="Figure10" />
图
10
施加激励前后大尺度机翼升力系数与阻力系数随迎角的变化情况
Figure
10.
Lift coefficient and drag coefficient of large size wing versus angle of attack with plasma actuation off and on
下载: 全尺寸图片
幻灯片
2.4
尺度效应分析
本节通过对比两种情况下的控制效果、能效比系数, 分析机翼尺度对控制效果的影响. 表3总结了两次实验时等离子体激励器提升的最大升力系数与推迟的机翼失速迎角. 由表可知, 在雷诺数相同的情况下, 两次实验时通过等离子体激励器获得的控制效果相当.
表
3
两次实验的控制效果对比
Table
3.
Comparison of control effects between two experiments
table_type1 ">
| Wind tunnel | Increased maximum lift coefficient/% | Delayed stall angle of attack/(°) |
| 750 mm × 750 mm | 12.8 | 4 |
| Φ3.2 m | 17.3 | 0.018 |
下载: 导出CSV
|显示表格
2.4.1
控制效果对比
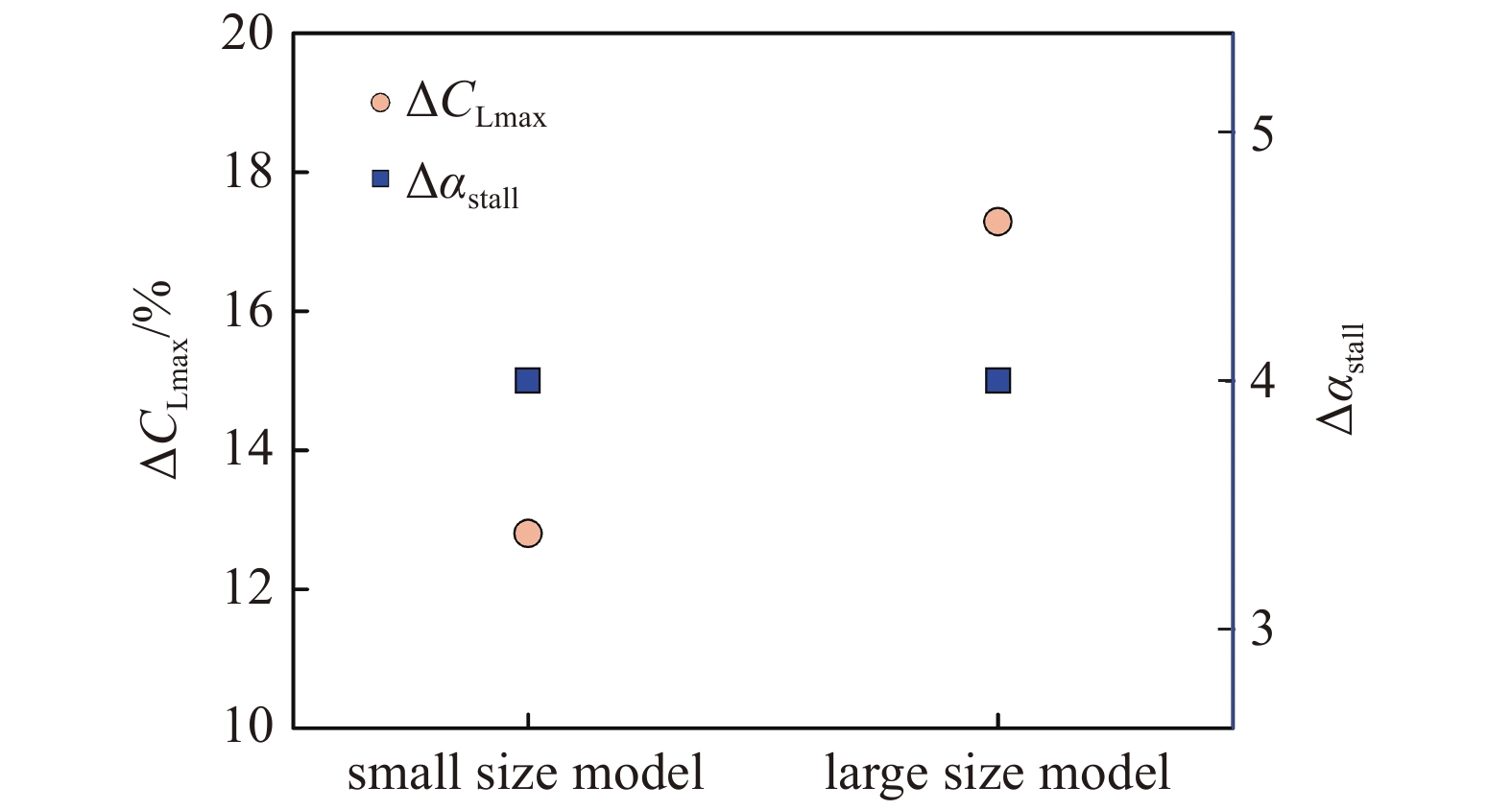
图11给出了在两次风洞实验中, 施加激励后, 最大升力系数的提升量与失速迎角的推迟量. 由图11可知, 当雷诺数相同的情况下, 机翼尺度对控制效果的影响较小. 施加等离子体激励后, 最大升力系数的增量保持在12.8%以上, 推迟的失速迎角均为4°.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-11.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-11.jpg'" class="figure_img
figure_type1 bbb " id="Figure11" />
图
11
施加激励后提高的最大升力系数与推迟的失速迎角
Figure
11.
Increased maximum lift coefficient and delayed stall angle of attack after plasma actuation
下载: 全尺寸图片
幻灯片
2.4.2
能效比系数对比
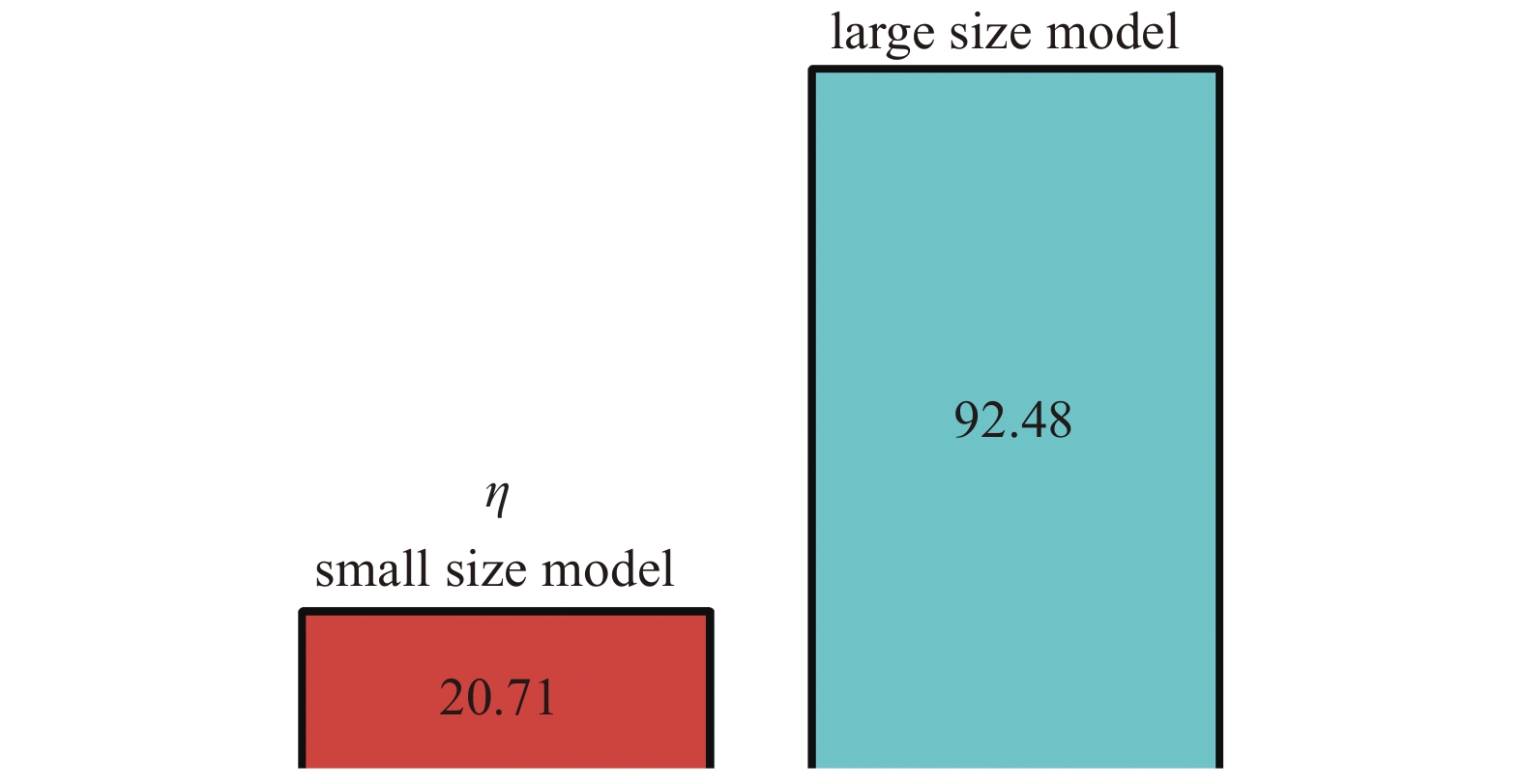
能效比(即获得的收益/消耗的功率)是评估激励器工作效率, 考核流动控制技术成熟度的关键指标. 如何提高激励器能效比, 是流动控制技术实现工程化应用的难点. 深入分析激励器能效比是提升激励器工作效率的重点. 目前, 在分离流等离子体流动控制研究领域还没有针对能效比提出的无量纲参数. 本文以文献[44]中描述的消耗功率系数为基础, 针对分离流控制提出了等离子体激励器能效比系数η. η = ΔCLmax/CE, 其中ΔCLmax表示最大升力系数增量. CE代表激励器消耗功率系数, 公式如下
$$ {C_{ m{E}}} = {P_{{ m{avg}}/{ m{m}}}}/{q_infty }{{{U}}_infty }c $$  | (1) |
其中Pavg/m为单位长度内激励器消耗功率, q∞为速压, U∞为来流风速, c表示机翼平均气动弦长.
图12给出了两种工况下的能效比系数. 由图12可知, 激励器针对大尺度模型的流动控制效率更高. 从能效比系数公式的分子、分母项来看, 激励器的这种表现主要由以下两点原因形成, 一是由于两种工况下, 激励器的控制效果接近(如图11所示), 因此, 能效比系数公式中的分子项近似相等; 二是结合单位长度内激励器消耗的平均功率、模型弦长以及风速3个因素, 对于大尺度模型, 单位长度内激励器消耗的功率系数小于小尺度模型下激励器消耗的功率系数. 即大尺度模型下, 激励器能效比系数公式的分母项小于小尺度模型下激励器能效比系数公式的分母项. 因此, 综合上述两点原因得出, 大尺度模型等离子体流动控制的效率更高.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-12.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-12.jpg'" class="figure_img
figure_type1 bbb " id="Figure12" />
图
12
两种工况下的能效比系数
Figure
12.
Energy consumption ratio coefficient under two cases.
下载: 全尺寸图片
幻灯片
另一方面, 从电学特性研究结果分析(如图8所示), 随着电极长度的增加, 单位长度内激励器消耗功率在不断降低. 这些结果都预示着, 对称布局激励器有望对真实飞机实现流动控制.
3.
分离流控制机理探索
在分析机翼尺度效应前, 通过PIV实验进一步探索了分离流对称布局等离子体控制机理, 验证测力实验结果.
3.1
时均流场
图13给出了在Re = 3.30 × 105 (U∞ = 50 m/s)的情况下, 施加激励前后, 小尺度机翼绕流流场的平均速度场. 由图13可知, 施加激励前, 机翼绕流边界层出现分离, 壁面附近出现回流区; 施加激励后, 气流基本附着在机翼表面. 流场结果与测力结果(如图8所示)吻合.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-13.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-13.jpg'" class="figure_img
figure_type1 bbb " id="Figure13" />
图
13
施加激励前后机翼时均流场的变化情况
Figure
13.
Time-averaged flow field around the wing with and without plasma (α = 18°)
下载: 全尺寸图片
幻灯片
3.2
瞬时流场
图14给出了等离子体抑制机翼分离流的时空演化过程. 如图14(a)所示, 刚开始激励时, 机翼绕流流场处于分离状态; 施加激励后, 等离子体增强了分离剪切层的不稳定性, 从而诱导产生了大尺度的展向涡结构(如图14(b)所示)[27, 45]; 随着时间的推移, 展向涡不断向下游发展, 促进了外部高速气流与边界层低速气流之间的掺混(如图14(c)所示); 当t = 0.24 s时, 分离区的面积大幅减小, 展向涡逐渐消失(如图14(d)所示); 当t = 0.28 s时, 等离子体在壁面附近诱导出一系列的拟序结构(如图14(e)所示); 这些拟序结构不仅能促进主流与边界层低速气流之间的掺混, 而且将能量从翼型前缘输运到翼型后缘, 从而实现了翼型全流场控制. 当t = 0.40 s时, 机翼绕流流场达到了准定常的状态(如图14(f)所示).
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-14-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-14-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure14-1" />
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-14.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-379-14.jpg'" class="figure_img
figure_type1 bbb " id="Figure14" />
图
14
施加激励后机翼绕流流场的时空演化过程
Figure
14.
Spatiotemporal evolution of flow field around the wing after plasma actuation (α = 18°)
下载: 全尺寸图片
幻灯片
总的来看, 施加对称布局等离子体激励后, 机翼绕流流场经历了流场分离、诱导展向涡运动发展、壁面拟序结构漂移运动、流场基本附着4个阶段.
4.
结论
(1)静止空气下激励器诱导流场特性: 对称布局DBD等离子体激励器会在上层电极两层产生两股速度近似相等, 方向相反的射流. 与传统壁面射流不同, 等离子体诱导射流是无源射流, 整个空间内的质量流量没有增加;
(2)激励器电学特性: 在本文研究的参数范围内, 随着电极长度的增加, 激励器平均消耗功率的增长速率逐渐减缓. 当电极长度达到一定阈值时, 激励器消耗功率将不再增加;
(3)激励器控制机理: 施加对称布局等离子体激励后, 机翼绕流流场经历了流场分离、诱导展向涡运动发展、壁面拟序结构漂移运动、流场基本附着4个阶段. 展向涡主要起促进主流与边界层低速气流掺混的作用; 壁面拟序结构主要起到诱导动量从翼型前缘往翼型后缘输运的作用;
(4)尺度效应: 一是在相同雷诺数下, 机翼尺度对分离流控制效果影响较小; 二是随着机翼尺度的增加, 能效比系数提高; 大尺度机翼分离流等离子体控制的效率更高.
总的来看, 随着模型尺度增大, 电极长度增加, 单位长度内的激励器平均消耗功率降低, 在本文研究的参数范围内, 控制效果并未降低, 能效比系数提高. 这些结果为真实飞机的分离流等离子体控制提供了技术支撑. 下一步将围绕进一步提高等离子体可控机翼尺度、大幅降低电源体积与重量、开展大尺度无人机飞行验证、深入探索等离子体流动控制机理等方面, 开展系统研究, 为该技术的工程化应用奠定基础.
