 ,2), �����й����Ƽ���ѧ�����ѧѧԺ, ��ɳ 410073
,2), �����й����Ƽ���ѧ�����ѧѧԺ, ��ɳ 410073SPACECRAFT EVASION STRATEGY USING ACTIVE MANEUVERS BASED ON MANEUVERING-TARGET ACCELERATION ESTIMATION 1)
Li Haohao, Zhang Jin,2), Luo YazhongCollege of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, ChinaͨѶ����: 2) �Ž�, ������, ��Ҫ�о�����: �����������滮. E-mail:zhangjin@nudt.edu.cn
�ո�����:2020-04-14��������:2020-06-20�����������:2020-11-18
| ��������: |
Received:2020-04-14Accepted:2020-06-20Online:2020-11-18
����� About authors

ժҪ
���ſռ�ٿؼ����ķ�չ, �������ڹ찲ȫ���������ܵ�����.�����������������ĺ�������Ŀ�꺽�����������ӽ�������в���������ڹ찲ȫ.�������������Ӳ���ʱ,���λ�á��ٶȡ����ٶȵ�״̬��ȡ����˫�����IJ����γɵĻ���.��������˫����Ϣ��ȡ����ȫ�������,����˻��ڻ���Ŀ���˲��������������ƫת�ʵ�����������Ѳ���.��˫�����������ڵ�ǰͳ��ģ���˲��㷨��öԷ������λ�á��ٶȡ����ٶȵȵ�����Ϣ.�ٺ��������ñ��������������ӽ����ݺ�����.���ݺ���������������ٺ����������߷�������ƫת��,���û����������ƫת�ʵ�������ܲ��Խ�������.�Բ�ͬ��ܲ��Լ���ͬ�������з������, �������:���ݺ������Ļ��������ﵽ�ٺ�������60%����ʱ,������Ĺ�ܲ��Կ���Ч����ٺ������������ӽ�;��ܲ��ԶԹ۲��豸�IJ������Ⱥ���Ƶ�ʲ�����;���Ч�����ܲ��Ե���Ӧʱ���й�, ���ݺ������յ�Ԥ����ϢԽ��, ���Ч��Խ��.
�ؼ��ʣ�
Abstract
With the development of space control technology, the safety of spacecraft in orbit has been paid more and more attention. The autonomous approach of the spacecraft with active maneuverability to the target spacecraft is a serious threat to the safety of the spacecraft in orbit. In the close orbital pursuit-evasion (PE) game of spacecraft, the acquisition of relative position, velocity and acceleration is the basis of the PE game strategy of both sides. In the case of incomplete information acquisition by both sides, an evasion control strategy based on the filtering estimation of maneuvering target and the maximizing line-of-sight yaw rate is proposed. The escaper obtains navigation information such as the relative position, velocity, and acceleration of the chaser based on the current statistical model filtering algorithm, and the chaser obtains navigation information of the escaper also based on the current statistical model filtering algorithm. The chaser uses the proportional guidance law to approach the escaper autonomously. The escaper calculates the line-of-sight direction and line-of-sight yaw rate relative to the chaser, and uses an active evasion strategy based on maximizing the line-of-sight yaw rate to escape. The different evasion strategies and different operating conditions are simulated. The results show that when the maneuverability of the escaper reaches more than 60% of the chaser, the escaper can escape successfully by using the proposed evasion strategy; the evasion strategy is not sensitive to the measurement accuracy and operating frequency of observation equipment, and the effect of evasion strategy is related to the response time, the earlier the escaper receives the warning information, the better the evasion strategy will be.
Keywords��
PDF (377KB)Ԫ������ά�����������������EndNote|Ris|Bibtex�ղر���
�������ø�ʽ
����, �Ž�, ������. ���ڻ���Ŀ���˲����Ƶĺ�����������ܲ���1). ��ѧѧ��[J], 2020, 52(6): 1560-1568 DOI:10.6052/0459-1879-20-113
Li Haohao, Zhang Jin, Luo Yazhong.
����
������, �������ٿؼ�����������.����ռ�������Խṹ[1]������ϵͳ[2]�Լ����Ϳռ�ṹ�ڹ���װ[3]�ȼ����������,���¸�����������̫���ʲ���ȫ����Խ��Խ����.�����������������Ŀռ�Ǻ����������Լ����������������쳣�ӽ��ǶԼ�����������ȫ���ش���в.���ٺ�����(���Ϊ����)�쳣�ӽ�ʱ,���ݺ�����(���Ϊ������)��Ҫͨ���������й��,��ܲ�����ʩ�ӻ�����ʱ������С�ͷ���, ������ֱ��Ӱ������������������.���, ��ܲ��Ե��о���������������ܵĺ�������.��������Ե����ǿռ�������������Ļ���[4].�������Ĺ�ܲ���ͬ���벻��������״̬�Ĺ���. ��������������ʱ,��ͳ�ĵ����˲��㷨�������������ᷢɢ,�����������������ʱ��Ҫ�о��µĵ����˲��㷨.����Ŀ���������ĺ����Ƕ�Ŀ��IJ�ȷ�����˶����н�ģ,��Ҫ˼·�ǽ�Ŀ�����ʵ������������ٶȽ���Ϊһ���������[5].���Ŀ�����ģ���ǰ��������ٶ�ģ��, Ҳ���ȼ���ģ��,������Ŀ�����ȼ����˶�, ��Ŀ����ٶȱ仯����ģΪ������.Singer[6]��1970�������������Singerģ��,�䱾���ǽ��������ٶȽ�ģΪ���ֵһ�������ɷ����,���ø�����ʵ�ʵ���ɫ������������������������ٶ�.�ҹ��ܺ��ʽ�����Singerģ�͵Ļ���������˵�ǰͳ��ģ��[7],�䱾���Ƿ����ֵ��һ�������ɷ�ģ��,�������������ֲ������������ٶȵĵ�ǰ�����ܶ�. Ŀǰ,��ǰͳ��ģ���ڻ���Ŀ�����������ʾ����ǿ���������[8].���Ļ��ڵ�ǰͳ��ģ�ͷ�չ����Ŀ���˲��㷨,Ӧ������������������������Ϣ�Ļ�ȡ.
�������Ĺ�ܲ���Ŀǰ���н϶��о�[9-10],��Ҫ���о�˼·�Ǽ����ʼʱ��������λ�á��ٶȵȵ�����Ϣ��֪,ͨ���趨�ն��Ѱ�������ײ���ʵ��Ż�ָ��,�������������ת��Ϊ�Ż�������д���.Bombardelli��[11]�����˻�������Ԥ����ײ��֮����ھ���ĺ���,����Ѱ��������ֵ, �Դ�Ϊʩ�ӻ�������. ����,Wang��[12]��֣�ص�[13]ͨ����Ծ��롢�ƺ����ȷ����о������DZ�ӷ����еĹ�ܻ�������.���������о�����������������ܲ��Ծ���һ���IJο���ֵ,�����о�������ǿռ���Ƭ��ʧЧ�����������������Ŀռ�Ŀ��,��ܲ���Ҳ�ǿ�����ײ���ʺ���Ծ���ȴ�ͳ���ָ��.�������������ݹ����п��������Ļ�������,�ǹ���������⽫�ӵ��߹滮�����Ϊ�Ӳ���˫�߹滮����[14].���ﻪ��[15]��ʱ��̶��������,���ڶ����Ͷ��Է����о�����˫�����������Ӳ����Լ��ӽ�դ.��־ΰ��[16]���ð�ֱ��������ֵ���������˫�����ſ��Ʋ���,�������������������ֵ����.��Դ��[17]����Эͬ�����㷨�о��˹̶�ʱ���µ�����������ά�ռ�������,˼·�ǽ�����˫�߹滮�����Ϊ���ӹ�������ʲ����������.�ڴ��ڵ�[18-19]�о�������˶���ϵͳ�ɹ۲��Ե�Ӱ��,���ϵͳ�ɹ۲��, �Դ�Ϊ�Ż�Ŀ������Ź�ܽ��������.����µ�[20]�����˺����������仯,����ά��������չΪ28ά, ���ü�Ӵ�з�����˰���.����褵�[21]�ڽ�Բ���������ʱ��������,�����һ��������������Ӳ��İ����Ľ�ά����.Dong��[22]ͨ����Ч�Ѱ�������ʣ�ಶ��ʱ��,����˲���ʱ�����Ż�����. ����,Shima��[23-24]�о��˿��Ǽ��ٶȹ����ӳٵĵ��������ֶԲ��Ƶ���.���������о�������Զ���ѧģ��,������Ϣ��Ϊǰ��[25],����������֪���������λ�á��ٶȵȿ���������, Ȼ�����ڷǺ���������,��Щ��Ϣ����ʵʱ��֪��, ��˱��Ŀ���ʵ�ʹ������,������ͨ���������˲����������״̬��Ϣ, ��״̬��Ϣ����һ�����.
�������ٲ���(��Ҫ����Ϊ���Ƶ���)ͬ����������Ĺؼ�����,Ȼ��������Ҫ�о��������Ĺ�ܲ���, ��˲��þ���ı���������(proportional navigation)��Ϊ�������Ƶ���.���������ɾ��м���Ч�������ڹ���ʵ�ֵ��ص�,�㷺Ӧ���ڵ������ء��ռ佻������[26-28].������Ҫ�о����������ñ��������ɽӽ�������, ��˫����Ϣ�����������,���������ڵ�ǰͳ��ģ������Ӧ�˲��㷨������״̬�����˲�����,ͬʱ�������ת���Խ��������Ƶ������õĺ���������������ܲ���.
1 ����Ŀ���˲��㷨
1.1 ��Ե����۲�ģ��
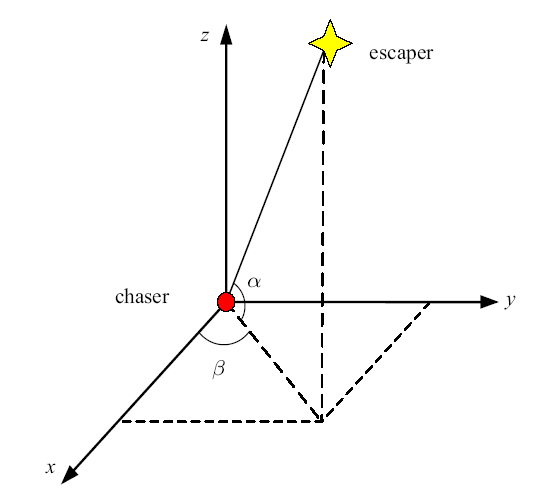
������˫��������ͬ�Ļ���Ŀ���˲��㷨��ȡ���״̬, ��˱�����������Ϊ������˵��. ������������Ϊԭ�㽨��VVLH��Ե�������ϵ$O_c$-$xyz$, ����$O_c$-$x$��ָ��������V-bar����, $O_c$-$y$��ָ��������$-$H-bar����, $O_c$-$z$��ָ��������$-$R-bar����.��Ե���������Ϊ��Ծ������Խ�λ��. ��VVLH����ϵ�ж���Խ�λ�ý��ж���,��ͼ1��ʾ, ������������������������߷����뵼������ϵ��$xy$ƽ��ļн�Ϊ������$\alpha \in(-{\pi}/{2} ,{\pi}/{2})$, ���߷�����$xy$ƽ���ͶӰ��$x$�᷽��ļн�(��$x$�Ὺʼ����ʱ�뷽�����)Ϊ��λ��$\beta\in (-\pi ,\pi)$.ͼ1
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ1��Ե�������ϵ
Fig. 1Relative navigation coordinate system
������������, ���������������й۲�ɵù۲ⷽ��Ϊ
����, $X$Ϊλ�á��ٶȺͼ��ٶȵ�״̬����, $X=[x,y,z,v_x ,v_y ,v_z ,a_x ,a_y,a_z ]^{T}$, ��Ӧ�Ĺ۲������Ծ���Ϊ
����, �۲������Ծ���$H$�ĸ���������ʽ����
$ h_{11} =\dfrac{x}{\sqrt {x^2+y^2+z^2} } $
$ h_{12} =\dfrac{y}{\sqrt {x^2+y^2+z^2} }$
$ h_{13} =\dfrac{z}{\sqrt {x^2+y^2+z^2} } $
$ h_{21} =-\dfrac{xz}{\sqrt {x^2+y^2} \left( {x^2+y^2+z^2} \right)} $
$ h_{22} =-\dfrac{yz}{\sqrt {x^2+y^2} \left( {x^2+y^2+z^2} \right)} $
$ h_{23} =\dfrac{\sqrt {x^2+y^2} }{x^2+y^2+z^2}$
$ h_{31} =-\dfrac{y}{x^2+y^2}$
$ h_{32} =\dfrac{x}{x^2+y^2}$
$ h_{33} =0 $
1.2 ���ڵ�ǰͳ��ģ�͵�����Ӧ�˲��㷨
�������������ĸ����˲��ǿռ���ά����, Ϊ���ڱ���������, ��$x$����Ϊ�����й�ʽ�Ƶ�. ���Ǽ��ٶȾ�ֵ�����ʱ�����ģ��,$x$����Ķ���ѧ����Ϊ����$\alpha _x $ Ϊ���ݾ����趨�Ļ���Ƶ��. ��$X_x (t)=\left[{x(t)} \ \ {v_x (t)} \ \ {a_x (t)} \right]^{T}$, ����ʽ(3)�����˲�״̬��������
����, $A_x =\left( {{\begin{array}{c@{\ \ }c@{\ \ }c} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 0 & 0 & {-\alpha _x } \\ \end{array} }} \right)$, $B_x =\left( {{\begin{array}{*{20}c} 0 \\ 0 \\ 1 \\ \end{array} }} \right)$, $F_x =\alpha _x \bar{{a}}_x $, $G_x (t)=\omega _x (t)$. ���������Ϊ$\Delta t$, �����������
$\varPhi _x (\Delta t)={e}^{A_x \Delta t}$
$U_x (\Delta t)=(\int_{k \Delta t}^{(k+1)\Delta t} {{e}^{[(k+1)\Delta t-\tau ]A_x }} {d}\tau )B_x F_x$
$W_x (k+1,k)=\int_{k \Delta t}^{(k+1)\Delta t} {{e}^{[(k+1)\Delta t-\tau ]A_x }B_x G_x (\tau )} {d}\tau$
��$X_x (k)=[x(k),v_x (k),a_x (k)]^{T}$,�ɵ���ɢ״̬����Ϊ
����
$\varPhi _x (k+1,k)=\left( {{\begin{array}{c@{\quad }c@{\quad }c} 1 & {\Delta t} & {\dfrac{-1+\alpha _x \Delta t+{e}^{-\alpha _x \Delta t}}{\alpha _x ^2}} \\ 0 & 1 & {\dfrac{1-{e}^{-\alpha _x \Delta t}}{\alpha _x }} \\ 0 & 0 & {{e}^{-\alpha _x \Delta t}} \\ \end{array} }} \right)$
$U_x (k)=\left( {{\begin{array}{*{20}c} {\dfrac{\bar{{a}}_x \left[ {2-2{e}^{-\alpha _x \Delta t}+\alpha _x \Delta t\left( {-2+\alpha _x \Delta t} \right)} \right]}{2\alpha _x ^2}}\\ {\dfrac{\bar{{a}}_x \left( {-1+{e}^{-\alpha _x \Delta t}+\alpha _x \Delta t} \right)}{\alpha _x }} \\ {\bar{{a}}_x -\bar{{a}}_x {e}^{-\alpha _x \Delta t}} \\ \end{array} }} \right)$
��$N_x (\Delta t)={e}^{[(k+1)\Delta t-\tau ]A_x }B_x$, ��$W_x (k)=\int_{k \Delta t}^{(k+1)\Delta t}N_x(\tau )$ $G_x (\tau ) {d}\tau $, $W_x (k)$Ϊ��ɢʱ�����������, ��$E[W_x (k)$ $W_x^{T}(k+j)]=0\ (\forall j\ne 0)$. ������$W_x (k)$�����ϵͳ���Э�������Ϊ
$Q_x (k)=[q_{ij} ]_{3\times 3}$�ľ������ʽ����ƪ��������ϸ����.
���ݵ�ǰͳ��ģ�͵�����, ��$a(k)$���˲������е�һ��Ԥ��ֵ$a(k$+1$\vert k)$������$k\Delta t$ ʱ��˲ʱ�ĵ�ǰ���ٶ�, ������������ٶȵľ�ֵ,��ɵõ����ٶȵľ�ֵ����Ӧ�㷨, ����$\bar{{a}}_x =a_x (k+1\vert k)$. ��ʱ,�����ٶȵ�˲ʱ��ֵ$\bar{{a}}_x $���뿨�����˲���ʽ$X_x (k+1\vert k)=\varPhi _x(k+1,k)X_x (k\vert k)+U_x (k)$, ��ɶ�״̬ת�ƾ���$\varPhi _x (k+1,k)$���л���,�õ���ֵ����Ӧ��״̬ת�ƾ���
��ʱ, ״̬ת�Ʒ��̼�Ϊ$X_x (k+1\vert k)=\varPhi _{x1} (k+1,$ $k)X_x (k\vert k)$.
����$y$��$z$����ʱ, ��ʽ�Ƶ������Ƶ�, ע���ʱ$X(t)=[x,y,z,v_x ,v_y ,v_z ,a_x ,a_y,a_z ]^{T}$, $F=[\alpha _x \bar{{a}}_x ,\alpha _y \bar{{a}}_y ,$ $\alpha_z \bar{{a}}_z ]^{T}$, $G(t)=[\omega _x (t),\omega _y (t),\omega _z(t)]^{T}$,���ٶȾ�ֵ$\bar{{a}}$��ȻΪ�˲������е�һ��Ԥ��ֵ$a$ ($k+1\vert k$).����ͬ���IJ�����л��ּ���. ֵ��ע�����, ��ʱϵͳ���Э�������$Q$ $(k)$���Ƶ�Ϊ
$Q(k)$Ϊ$9\times9$�ľ���, �������ʽ����ƪ��������ϸ����.
2 ����������ܲ������
�����������ñ��������ɶ������������ٽӽ�,���������ɵ�ԭ�������������������������������ƫת,ʹ����һֱ��������. ��������Ҫͨ��������������Ľӽ�ʱ,����ͨ��ʩ���ʵ�����ļ��ٶ�ʹ����ƫת�����, ������������������,ʹ�Ѱ������Ӷ��ﵽ��ܵ�Ч��.2.1 �������������Ƶ�ָ����ٶ�
Ϊ������������ƫת�����Ƶ�ָ����ٶ�, ������������ϵ. ����������Ϊԭ��,$X$��ָ�����߷���, $Y$���ڹ�����ڴ�ֱ��$X$��, $Z$����$X$, $Y$�ṹ������ϵ. ���մ˶���,��֪����ϵ������$Y$����ת$q_\beta $��, ����$Z$����ת$q_\varepsilon $��,��ɵõ�����ϵ. ���, ����ϵ��$x_A ,y_A ,z_A $���������᷽��ɱ�ʾΪ��ά��������������������ϵ�ڵ�ָ����ٶ�Ϊ[29]
2.2 �������������߽Ǽ����߽�����
����������ϵ��, ���߽�$q_\varepsilon $��$q_\theta$�Լ����߽�����$\dot{{q}}_\varepsilon $��$\dot{{q}}_\theta$�������¹�ʽ����[29]����, $(x, y, z)$��ʾ�����������������λ��, $(v_x ,$ $ v_y , v_z)$��ʾ������������������ٶ�.
2.3 ������ܿ��Ƽ��ٶ�
�������ñ��������ʶ������������ٽӽ�, ���������ò�ǼӲ��IJ�����ʽ,���ǿռ��в�ǺͲ��IJ������, ���õ�ǰͳ��ģ�Ͷ����������˲�����,�õ�������VVLH����ϵ�е�λ��$(x_{r}^V , y_{r}^V , z_{r}^V)$���ٶ�$(v_{{r}x}^V , v_{{r}y}^V , v_{{r}z}^V )$���˲���Ϣ,����ת��������ϵ$(x_{c}^A , y_{c}^A , z_{c}^A )$��$(v_{{c}x}^A , v_{{c}y}^A, v_{{c}z}^A )$. ����������������λ��$(x_{t}^A , y_{t}^A , z_{t}^A)$���ٶ�$(v_{{t}x}^A , v_{{t}y}^A , v_{{t}z}^A )$��֪.ͨ������ϵ�еĵ�������, ����ʽ(10)��ʽ(11)����������ǰ��ָ����ٶȷ���,�Դ�Ϊ��������ǰ�����ݷ���. �����������Ƶ����ٶ�Ϊ����, $a_{Nt}$Ϊ������������������ٶ�, ��������ʼ���������ٶȽ��л���.
3 ��������
3.1 ��������
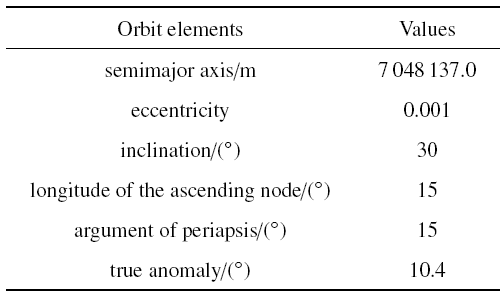
�������ij�ʼ�����������1��ʾ, ���������ù�ѧ����ͼ������Ƕ��������в���, ���Ի����Ծ��롢�����Ǻͷ�λ��. ��ǰͳ��ģ����, $x$, $y$, $z$��������Ļ���Ƶ����Ϊ$\alpha _x =\alpha _y =\alpha _z =0.001$ Hz, �˲������ٶ���Ϊ1.8 m/s$^{2}$. �����������İ�ȫ����$d = 100$ m,��������������֮��ľ���$\vert r\vert < d$ʱ, ��Ϊ�����ɹ��ӽ�������. �������ñ�����������������,�����������������߷��������ٶȴ���0ʱ, ��Ϊ�����Ѱ�, �������.Table 1
��1
��1�������������
Table 1
 |
�´��ڴ�|����CSV
3.2 �������
����������֤����Ĺ�ܲ��Ե���Ч��, Ȼ��ӹ۲��豸(��ѧ�������������)�IJ������ȡ�����Ƶ�ʡ��������������ij�ʼ״̬���������Ļ��������ȷ�����������Է���,�Ա�֤�����ȫ���ԺͿɿ���.3.2.1 ��ܲ�����Ч����֤
���ѧ����ĽǶȲ���������Ϊ$\varepsilon _{r} = 0.001$ rad,�������ǵľ������������Ϊ$\varepsilon _{d} = 10$ m.��ѧ����ͼ������ǵĹ���Ƶ����Ϊ$f =$ 1 Hz.��������������Ϊԭ���VVLH����ϵ��, �����������������λ��Ϊ$r_{rel}=$ $[-21 000 \mbox{m}, 0 \mbox{m}, 12 000.0 \mbox{m}]^{T}$,�ٶ�Ϊ$v_{rel}=[23.0 \mbox{m/s},$ $0 \mbox{m/s}, -14.0 \mbox{m/s}]^{T}$.������������������ٶ�Ϊ$a_{Nt} = 1.0$ m/s$^{2}$,����������������ٶ�Ϊ$a_{Nc} = 1.05$ m/s$^{2}$.Ϊ��Ч��������Ĺ�ܲ��Ե���Ч��, �������4��Աȹ���:(1) ������������;(2) ���������չ̶��������($\alpha =30^{\circ}, \beta =180^{\circ})$;(3) ���������չ̶��������($\alpha =-30^{\circ}, \beta =180^{\circ})$;(4) �����������������ƫת�ʵ�������ܲ��Խ��л���.
��������ͼ2��ʾ, ����, �����ʾ����ʱ��, �����ʾ����������������ľ���(��ͬ).
ͼ2
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ2��ܲ�����Ч����֤
Fig. 2Validation of evasion strategies
��ͼ2��֪, ������������ʱ, ������193 s�ɹ��ӽ�������; ����������$\alpha=30^{\circ}$, $\beta =180^{\circ}$�Ĺ̶��������ʱ, ������142 s�ɹ��ӽ�������; ����������$\alpha =-30^{\circ}$, $\beta=180^{\circ}$�Ĺ̶��������ʱ, �������ӽ����������İ�ȫ��������, ��190 sʱ, ���������������߷��������ٶȱ�Ϊ����0ʱ, �����Ѱ�,��ʱ����������������Ծ���Ϊ3 038 m; ���������ջ�����ܲ��Խ��л���ʱ,�������ӽ����������İ�ȫ��������, ��287 s,���������������߷��������ٶȱ�Ϊ����0ʱ, �����Ѱ�,��ʱ����������������Ծ���Ϊ11 142 m. ���Ϸ���,�������ƫת�ʵ�������ܲ��Կ�����Ч�������������������.
3.2.2 �������������Է���
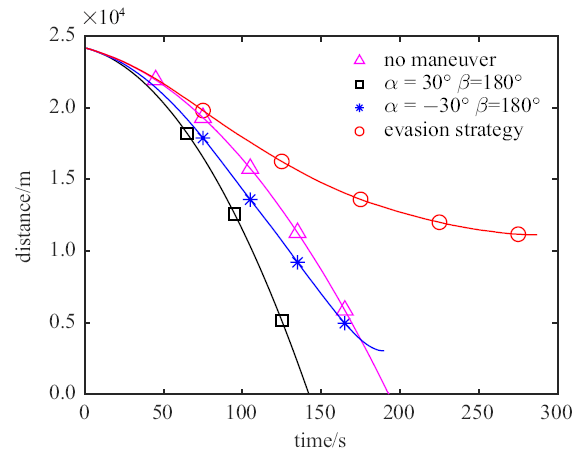
������ѧ����ͼ������ǵIJ������ȶԹ�ܲ��Ե�Ӱ��. �������Աȹ���,�ǶȲ���������$\varepsilon _r $�;������������$\varepsilon _{d}$�ֱ�Ϊ(1) $\varepsilon _{d} =1$ m, $\varepsilon _{r} =0.000 1$ rad; (2) $\varepsilon _{d}=10$ m, $\varepsilon _{r} =0.001$ rad; (3) $\varepsilon _{d} =100$ m, $\varepsilon_{r} =0.01$ rad. �������������3.2.1��ͬ. ��������ͼ3��ʾ.
ͼ3
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ3�������������Է���
Fig. 3Measurement accuracy sensitivity analysis
��ͼ3��֪, ���������½������˲������½�, $\varepsilon _d=100$ m, $\varepsilon _r =0.01$ rad��Ӧ�����߲��������������ƽ��,������������ܻ�����Ч��������������, ��˵����ܲ��ԶԹ۲��豸�IJ������Ȳ�����.
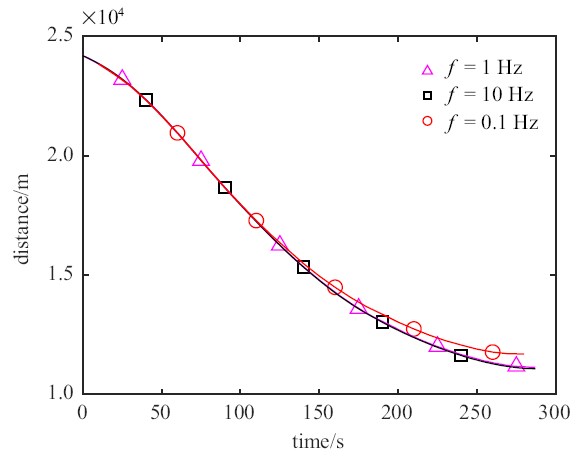
3.2.3 ����Ƶ�������Է���
������ѧ����ͼ������ǵĹ���Ƶ�ʶԹ�ܲ��Ե�Ӱ��. ���3��Աȹ���,����Ƶ��$f$�ֱ�ȡ(1) $f=1$ Hz; (2) $f=10$ Hz; (3) $f=0.1$ Hz. �������������3.2.1����ͬ.��������ͼ4��ʾ.
ͼ4
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ4����Ƶ�������Է���
Fig. 4Frequency sensitivity analysis
��ͼ4��֪, ����Ƶ�ʽ���ͬ�������˲������½�, �������$f=0.1$ Hz��Ӧ���������������ֹ�����һ�����,������������ܻ�����Ч��������������, ��˵����ܲ��ԶԹ۲��豸�Ĺ���Ƶ�ʲ�����.
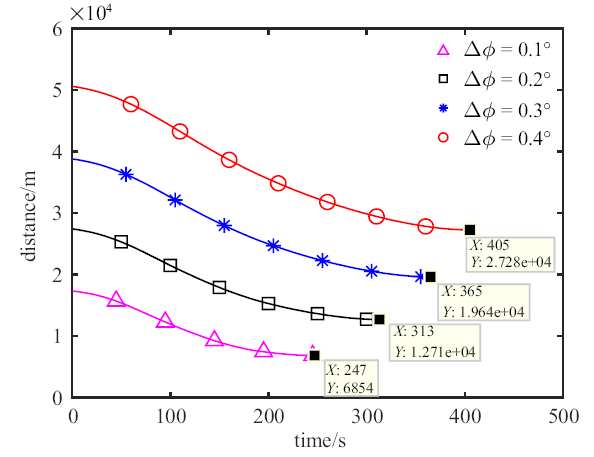
3.2.4 ��ʼ״̬�����Է���
��������������������ij�ʼ״̬�Թ�ܲ��Ե�Ӱ��.�������Ĺ������������120 km, ����λ����������, ��λ���$\Delta \phi $, ������������ͬ. �������Աȹ���, ��λ��$\Delta \phi$�ֱ�ȡ(1) $\Delta \phi =0.1^{\circ}$, (2) $\Delta \phi =0.2^{\circ}$, (3) $\Delta\phi =0.3^{\circ}$, (4) $\Delta \phi =0.4^{\circ}$, �������������3.2.1����ͬ. ��������ͼ5��ʾ.
ͼ5
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ5��ʼ״̬�����Է���
Fig. 5Sensitivity analysis of initial state
��λ��$\Delta \phi $Խ��, ��ζ��������Խ���յ�Ԥ����Ϣ��ʼ����. ��ͼ5��֪, �������յ�Ԥ����ϢԽ��, �����Ѱ�ʱ, ����������������ľ���ԽԶ, ���������İ�ȫ��Խ��, ���Ч��Խ��.
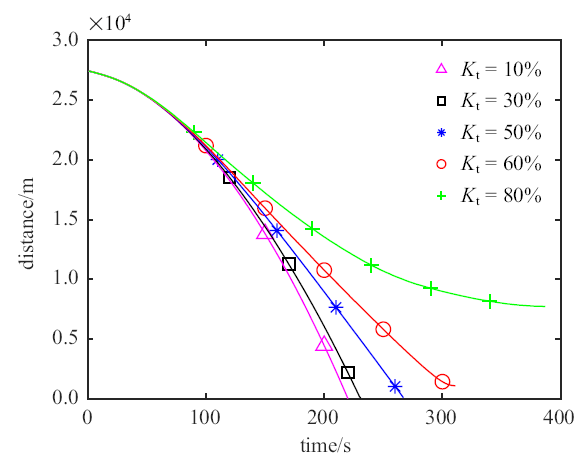
3.2.5 �������������������Է���
�������������������Թ�ܲ��Ե�Ӱ��. ������������������ٶ�Ϊ$a_{Nc} = 1.0$ m/s$^{2}$, ������������������ٶ�Ϊ$a_{Nt} =k_{t} \times a_{Nc}$, �������������3.2.1����ͬ. ��Բ�ͬ��ϵ��$k_{t}$���5��Աȹ���, �ֱ�Ϊ(1) $k_{t} = 10\%$, (2) $k_{t} = 30\%$, (3) $k_{t} = 50\%$, (4) $k_{t} = 60\%$, (5) $k_{t} = 80\%$. ��������ͼ6��ʾ.
ͼ6
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ6�������������������Է���
Fig. 6Sensitivity analysis of escaper maneuverability
��ͼ6��֪, ����$k_{t}$���, ������������������ǿ, ��$k_{t} = 50\%$, �������������������ĸ���, ��$k_{t} = 60\%$, ����������Ч����������쳣�ӽ�. ��˿�ȡ����ֵ$k_{t} = 60\%$, ���������Ļ��������ﵽ������60%����ʱ, ���������������ƫת�ʵĹ�ܲ�����Ч.
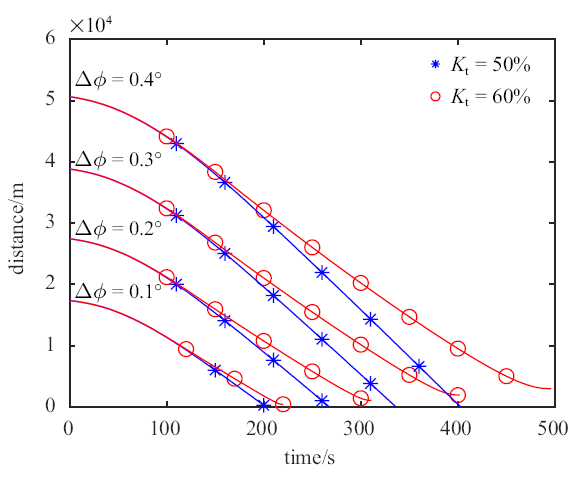
���ò�ͬ�Ĺ�����֤60%������ֵ�Ƿ���Ч. ���$\Delta \phi =0.1^{\circ}$, $\Delta \phi =0.2^{\circ}$, $\Delta \phi =0.3^{\circ}$, $\Delta \phi =0.4^{\circ}$��������ֱ����(1) $k_{t} = 50\%$, (2) $k_{t} =60\%$����Աȹ���, ��������ͼ7��ʾ.
ͼ7
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ7��ͬ��ʼ״̬��$k_{t}$��Ӱ��
Fig. 7The influence of different initial states on $k_{t}$
��ͼ7��֪, ��Բ�ͬ����λ��$\Delta \phi $, �������Ļ��������ﵽ������60%ʱ, ����������Ч����������쳣�ӽ�,��60%������ֵ��Ч.
���������ͬ�Ļ�������$a_{Nc}$���3��Աȹ���, ��������������Ϊ$a_{Nt}=60\% \times a_{Nc} $, ������������ȡ(1) $a_{Nc} = 0.5$ m/s$^{2}$, (2) $a_{Nc} = 1$ m/s$^{2}$, (3) $a_{Nc} = 2$ m/s$^{2}$.
��������ͼ8��ʾ. ������֪, ���������ͬ�Ļ�������$a_{Nc}$, �������Ļ��������ﵽ������60%����ʱ, ����������Ч����������쳣�ӽ�, ��60%������ֵ��Ч.
ͼ8
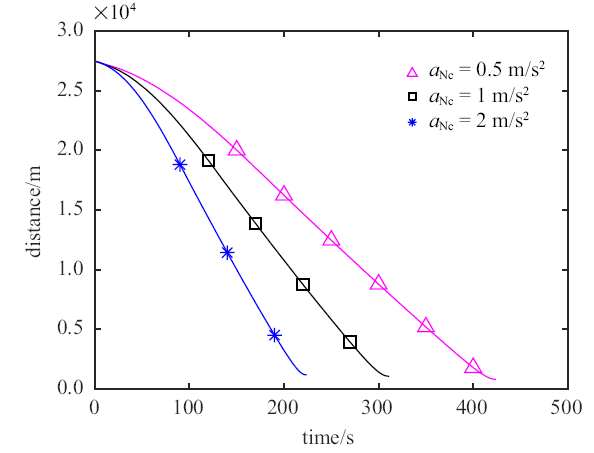 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ8��������������$k_{t}$��Ӱ��
Fig. 8The influence of chaser's maneuverability on $k_{t}$
���Ϸ���, ����������������ƫת�ʵ�������ܲ���, ������������ֵΪ60%, ���������Ļ��������ﵽ������60%����ʱ, ��ܲ�����Ч.
4 ����
�����ں������������Ӳ��ĵı�����, ����������������ܲ��Խ������о�. �����˻��ڵ�ǰͳ��ģ�͵Ļ���Ŀ���˲��㷨,���ڱ�����������������ƫת�ʵĻ���ԭ��, ���������ƫת�ʵĽǶ����ֵõ����������Ĺ�ܼ��ٶ�, �������������������Ƶ��ʵ���Ч��. ͨ����������ɵó����½���: ������ͨ�������������쳣�ӽ�������, ��ȫ����Ϊ100 m, ���������Ļ��������ﵽ������60%����ʱ, ���������û����������ƫת�ʵĹ�ܲ��Խ��л�������Ч����������쳣�ӽ�;��ܲ��ԶԹ۲��豸�IJ������Ⱥ���Ƶ�ʲ�����; �������յ�Ԥ����ϢԽ��,���Ч��Խ��. ����Ĺ�ܲ���������ȷ����ʽ���������ڹ���ʵ��.�ο����� ԭ��˳��
������ȵ���
������������
�����ڿ�Ӱ������
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
DOIURL [��������: 1]

�����ƺ������о�����ģ�Ͳ�ȷ���Եı�ӷ������DZ�����ײ������ӦЭͬ���ơ��ƺ�������˼��Ϊ�����ײ�����ƺ���ֵ�ϴ�,����ƵĿ�����ʹ��ϵͳ�ƺ������м�С������,�Ӷ�ʵ�ֱ�����ײ�ı�ӷ�����������,�����ⲿ�ο��켣�������,ͨ�����������ײ�ƺ���,���һ������ӦЭͬ������,�����������ʵ���ٶ�һ�ºͱ�����ײ����һ��,������֪�ⲿ�ο��켣������,�����µ��ƺ�������,����µ�����ӦЭͬ������,�ܹ�ͬʱʵ�ֱ�����ײ���ٶ�һ�¡����Ǹ��ٲο��켣��Ŀ�ġ���������������ֿ��Ʒ���,��ͨ��������Ӧ��Lyapunov�ȶ������۷����˱ջ�ϵͳ���ȶ��ԡ�����������������ƿ��Ʒ�������Ч�ԡ�
DOIURL [��������: 1]
The adaptive coordination control based on potential function method associated with collision avoidance is investigated for formation flying satellites with model uncertainty. The idea of potential function method is designing the bigger value of potential function in the collision area. The potential function of the system declines with the designed control law, thus the mission of formation flying with collision avoidance can be satisfied. Firstly, an adaptive coordinated controller is proposed by introducing a collision avoidance potential function in the absence of external reference trajectories, so that formation flying satellites can achieve velocity consensus and collision avoidance eventually. Then, taking into consideration an external reference trajectory, a new adaptive coordinated controller is designed based on a new potential function, and the objective of collision avoidance, velocity consensus and satellites tracking the reference trajectory is realized simultaneously. For the two presented control approaches, the stability of the closed loop system is both analyzed by using Lyapunov stability theory. Simulation results demonstrate the effectiveness of the designed control methods.
PMID [��������: 1]
URLPMID [��������: 1]
The anti-virus and anti-bacteria active components were extracted from some Chinese medicine, such as the honeysuckle, forsythia and the licorice. Using a w/o/w emulsion method, the active components were fabricated to uniform particulate microcapsule with sustained-release properties. The polypropylene punched felt was finished with the finishing agent of microcapsule, nano ZnO and TiO2 and polymer adhesive, and the composite air filter with anti-virus and anti-bacteria properties were formed, staphylococcus aureus, colibacillus and candida albicans were applied to antibacterial experiments. The results indicate that the anti-bacteria rate are all 100%, and the virus inactivation rate also reaches 100% to pandemic influenza A virus.
DOIURL [��������: 1]
���ʱ��̶����������������⣬�����ֶԲ������о�����˫�������ſ��Ʋ��Լ���ⷽ�����о�������������Ϊ����С�������������£����ն˾���Ϊ֧������������ϣ��֧����С��������ϣ��֧���������ʱ��Ĺ���߶ȼ�ʱ��Ľ��ٶȽ����Բ�ģ�ͣ�ģ�;��и�άʱ���������ɶԲ߱�Ҫ�������Բ��о�����ת��Ϊ��άʱ������������ֵ�������⡣ ������ö��ش�з��Ͷ�Ŀ���Ŵ��㷨�Ļ���㷨�����Խ�������������������ֵ���⣬��������ֵ���ľ��巽���������У��漰��ֵ�����е�Э̬������ֵ����ʱ�����ö�Ŀ���Ŵ��㷨������ֵ���ƣ����ɶ��ش�з��������ֵ����Ľ⡣����ʵ������������㷨������������⣬���ܱ�֤���㾫�ȣ��־��нϺõ�³���ԣ��������ո�������˫�������ſ��Ʋ��Ժ���Ӧ���ӹ켣��
DOIURL [��������: 1]
For the problem of pursuit\|evasion with fixed duration for two spacecraft, an optimal control strategy and its numerical solution method are investigated based on the differential game theory. The two spacecraft are conflicted with each other under the assumed condition of low continuous thrust in a dynamics system with time dependent angular velocity and trajectory altitude. The terminal distance is taken as a payoff. The pursuer tries to minimize the payoff, and the evader tries to maximize it. Consequently, a high order time dependent nonlinear two point boundary value problem is introduced by using the necessary condition of the differential game. In this paper, a hybrid algorithm is presented by combining the multiple shooting method with the genetic algorithm for solving this type of pursuit evasion problem. In this hybrid algorithm, an improved multi objective genetic algorithm is adopted to obtain the initial estimation of the costate variables, and the result of the genetic algorithm is used as a feeder for the multiple shooting method to solve the solution of the complex two point boundary value problem. It is shown by the simulations that this hybrid algorithm has guarantee accuracy and robustness for the problem. Simultaneously, the optimal strategies and the corresponding pursuit evasion trajectory are obtained.
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
//
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
DOIURLPMID [��������: 1]
The seed embryo of Arabidopsis thaliana, the favorite plant of up-to-date molecular developmental biology, represents a valuable model system for space radiation research with heavy ions. For several years, densely ionizing particles have been available for basic studies in nuclear physics and radiation biology through special accelerators as well as through space flight missions. Because of the great variability of the available radiation spectra, the induced relative biological effect (RBE-value) has to be differentiated with respect to the effective charge (z) and the linear energy transfer (LET) deposited in a certain volume of matter, and to the biological targets which differ in size, structure and function. The results of comparative studies of 8 space flight experiments, here by example show increasing damage produced by single heavy ions and/or cosmic background radiation (protons, neutrons, X-rays). These results offer new prospects for molecular investigation of the RBE of heavy ions in space.
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 2]
[��������: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}