Abstract Due to the high aero to inertia ratio and the presence of strong aerodynamic forces, the low Earth orbit nanosatellites are not very appropriate to depend on a set of momentum wheels for attitude controlling. A method of utilizing aerodynamic disturbance torque as control input based on mass moment technology is innovatively proposed for the Nano-satellite in the low Earth orbit to solve the problem of the external aerodynamic force. The exclusive use of moving mass actuator would lead to an underactuated as the aerodynamic torque was perpendicular to the relative flow vector. To achieve full three-axis stabilization, a three-axis magnetorquer is used to complement the moving mass system to generate a torque along the orbital velocity. The whole dynamic equations are derived, which describes the system with two actuators, the movable mass and the magnetorquer, actuating simultaneously. According to the influence of disturbance items, the equations are simplified. Considering the uncertainty of the aerodynamic forces, the error of system parameters, and unknown environmental disturbance, a sliding mode control scheme based on disturbance observer is designed for ideal control input. An optimal torque allocation strategy is designed in order to generate the torque determined by the aforementioned nonlinear control law by moving the masses and commanding the magnetotorquer, and therefore combining the subspace of two actuators. Finally, a semi-physical simulation platform was built for two actuators and the results indicate that, additional inertia torque, related to the mass acceleration, is the main disturbance torque during the attitude maneuver and can be significantly reduced by optimal torque decomposition strategy. Meanwhile, during the attitude maintenance, the disturbance observer can effectively observe the system disturbances and improve the attitude control accuracy. The error of attitude angle is less than $\pm $0.1$^\circ$. The results verify the feasibility of the use of the moving mass actuator to actively control the aerodynamic torque. Keywords:attitude control;mass moment;aerodynamic torque;disturbance observer;torque allocation;semi-physical simulation
PDF (3301KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 胡远东, 陆正亮, 廖文和. 低轨纳卫星质量矩姿态控制技术研究1). 力学学报[J], 2020, 52(6): 1599-1609 DOI:10.6052/0459-1879-20-116 Hu Yuandong, Lu Zhengliang, Liao Wenhe. ATTITUDE CONTROL TECHNOLOGY FOR MASS MOMENT NANO-SATELLITE IN LOW EARTH ORBIT 1). Chinese Journal of Theoretical and Applied Mechanics[J], 2020, 52(6): 1599-1609 DOI:10.6052/0459-1879-20-116
Fig. 4The flow diagram of the semi-physical simulation process
所选用两单元立方星尺寸为110 mm $\times $ 110 mm $\times $ 230 mm,给定本体系下三滑块的位置矢量${p}_1 =[l_1 ,0.01,-0.01]^{T}$ cm, ${p}_2 =[-0.01,l_2 ,0.01]^{T}$ cm, ${p}_3 =[0.01,-0.01,l_3]^{T}$ cm, 卫星系统质心在本体系下三方向可调整范围为$\pm $1.35mm.其余系统参数及控制参数如表1所示.
( CaoDengqing, BaiKunchao, DingHu, et al. Research progress in dynamics and vibration control of large flexible spacecraft Acta Mechanica Sinica, 2019,51(1):9-21 (in Chinese)) [本文引用: 1]
ZhangXH, ZhangX, LuZL, et al. Optimal path planning-based finite-time control for agile CubeSat attitude maneuver IEEE Access, 2019,7:102186-102198 DOIURL [本文引用: 1]
( WeiPengxin, GaoChangsheng, JingWuxing. The research on the uncertainty of pressure center for moving mass actuated vehicle Aerospace Control, 2012,30(2):39-45 (in Chinese)) [本文引用: 1]
( ZhuAn, ChenLi. Mechanical simulation and full order sliding mode collision avoidance compliant control based on neural network of dual-arm space robot with compliant mechanism capturing satellite Chinese Journal of Theoretical and Applied Mechanics, 2019,51(4):1156-1169 (in Chinese)) [本文引用: 1]
FiruziS, GongS. Attitude control of a flexible solar sail in low Earth orbit Journal of Guidance, Control, and Dynamics, 2018,41:1715-1730 DOIURL [本文引用: 1]
ChildsDW. A movable-mass attitude-stabilization system for artificial-g space stations Journal of Spacecraft Rockets, 1971,8(8):829-834 DOIURL [本文引用: 2]
EdwardsTL. Automatic spacecraft detumbling by internal mass motion AIAA Journal, 1974,12(4):496-502 DOIURL [本文引用: 1]
BainumPM, SellappanR. The use of a movable telescoping end mass system for the time-optimal control of spinning spacecraft Acta Astronautica, 1978,5(1):781-795
KunciwBG, KaplanMH. Optimal space station detumbling by internal mass motion Automatica, 1976,12:417-425 DOIURL
GuoP, ZhaoL. Modeling and attitude control of a spinning spacecraft with internal moving mass Advanced Materials Research, 2013,760:1216-1220 [本文引用: 1]
KumarKD, ZhouAM. Attitude control of miniature satellites using movable masses // SpaceOps 2010 Conf. , Huntsville, Alabama, USA, Apr. 2010, Paper AIAA 2010-1982 [本文引用: 1]
AtkinsBM, HendersonTA. Under-actuated moving mass attitude control for a 3U CubeSat mission // 22nd Spaceflight mechanics., Charleston, South Carolina, Jan. 2012, vol. 143, pp. 2083-2094
DanielEH. Dynamics and control of spinning spacecraft using translating masses with friction conpensation Journal of Spacecraft and Rockets, 2017,54(6):1376-1381 DOIURL [本文引用: 1]
ShahinF, GongS. Attitude control of a flexible solar sail in low earth orbit Journal of Guidance Control and Dynamics, 2018, 1715-1729 [本文引用: 2]
ThomasS, PaluszekM, WieB. Design and simulation of sailcraft attitude control systems using the solar sail control toolbox // AIAA Guidance, Navigation, and Control Conference and Exhibit, AIAA Paper2004,4890:16-19
WieB. Solar sail attitude control and dynamics, part two Journal of Guidance, Control, and Dynamics, 2004,27(4):536-544 DOIURL [本文引用: 1]
WieB, MurphyD. Solar-sail attitude control design for a flight validation mission Journal of Spacecraft and Rockets, 2007,44(4):809-821
( YinTingting, DengZichen, HuWeipeng, et al. Dynamic modelling and simulation of orbit and attitude coupling problems for structure combined of spatial rigid rods and spring Acta Mechanica Sinica, 2018,50(1):87-98 (in Chinese))
( LuZhengliang, ZhangXiang, YuYongjun, et al. Modeling and layout optimization of mass moment attitude control for cube satellite Systems Engineering and Electronics, 2017,39(3):599-605 (in Chinese))
( LuZhengliang, ZhangXiang, YuYongjun, et al. Design of attitude control system of mass moment in orbit changing section of nanosatellite Acta Aeronautica et Astrinautica Sinica, 2017, 38(6): 320778(1-9)(in Chinese))
PetsopoulosT, ReganFJ, BarlowJ. Moving-mass roll control system for fixed-trim re-entry vehicle Journal of Spacecraft and Rockets, 1996,33(1):56-60 [本文引用: 2]
( LuZhengliang. Research on attitude control technology of mass moment for fast maneuvering satellite. [PhD Thesis] Nanjing: Nanjing University of Science and Technology, 2017 (in Chinese)) [本文引用: 2]
ChesiS. Attitude control of nanosatellites using shifting masses. [PhD Thesis] Santa Cruz: University of California, 2015 [本文引用: 2]
ChesiS, GongQ, RomanoM. Aerodynamic three-axis attitude stabilization of a spacecraft by center-of-mass shifting Journal of Guidance, Control and Dynamics, 2017,40(07):1613-1626 DOIURL [本文引用: 1]
Virgili-LlopJPolatH. Using shifting masses to reject aerodynamic perturbations and to maintain a stable attitude in very low earth orbit // 26th AAS/AIAA Space Flight Mechanics Meeting, Napa, CA, 2016, AAS 16-354, 2129-2148 [本文引用: 1]
PolatH. Prototype design and mission analysis for a small satellite exploiting environment disturbances for attitude stabilization. [PhD Thesis] Monterey: Naval Postgraduate School, 2016
Virgili-LlopJ, PolatH, RomanoM. Attitude stabilization of spacecraft in very low earth orbit by center-of-mass shifting Frontiers in Robotics and AI, 2019,6(7):1-19 DOIURL [本文引用: 2]
( LiuJinkun. Sliding Mode Control Design and MATLAB Simulation: The Basic Theory and Design Method. Beijing: Tsinghua University Press, 2015 (in Chinese)) [本文引用: 1]
( LiuJinkun. Sliding Mode Control Design and MATLAB Simulation: The Design Method of Advanced Control System. Beijing: Tsinghua University Press, 2015 (in Chinese)) [本文引用: 1]
HuQ, LiB, QiM. Disturbance observer based finite-time attitude control for rigid spacecraft under input saturation Aerospace Science and Technology, 2014,39(1):13-21 DOIURL [本文引用: 1]
 ,2), 廖文和南京理工大学机械工程学院, 南京 210094
,2), 廖文和南京理工大学机械工程学院, 南京 210094
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT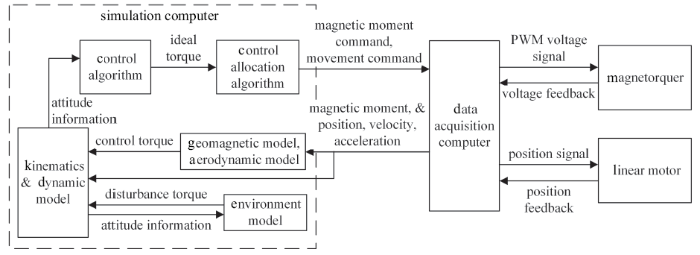 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT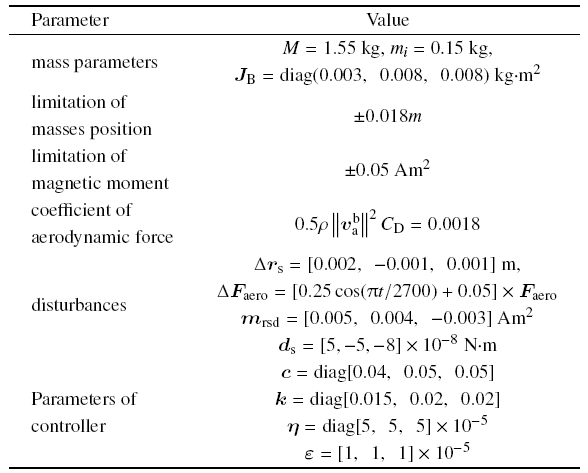
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}