RESEARCH ON SEPARATION STRATEGY AND DEPLOYMENT DYNAMICS OF A SPACE MULTI-RIGID-BODY SYSTEM 1)
Luo Caoqun*, Sun Jialiang*, Wen Hao*, Hu Haiyan*,?, Jin Dongping,*,2)* State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China ? MOE Key Laboratory of Dynamics and Control of Flight Vehicle, School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
Abstract The paper focuses on the separation and deployment dynamics of an on-orbit compactly connected multi-rigid-body (MRB) system, which could separate autonomously from a carrier spacecraft. Based on the focused MRB system, it is not necessary to repeatedly use the launcher of the carrier spacecraft or install multiple launchers in the spacecraft to separate the MRB system. This is advantageous because it can effectively improve the space utilization rate of the spacecraft, simplify the separation deployment operations and reduce the risk of collision between rigid bodies. To realize the separation of such a MRB system, the paper presents an investigation on its on-orbit dynamics and the design of collision-free separation deployment schemes. Firstly, a dynamic model of a single rigid body is established based on the principle of virtual work and the Natural Coordinate Formulation (NCF) method accounting for the relative motion between rigid bodies and attitude changes of each rigid body. Considering the orbital motion, the variations of connecting constraints of the MRB system and the interactions between rigid bodies during the separation, the governing nonlinear dynamic equations including constraints of the system are obtained with a method of Lagrange multipliers. With practical engineering applications taken into consideration, the separation deployment of MRB system is realized through ejection mechanisms mounted on the four corners of each contact surface between rigid bodies. Secondly, the timing sequences of separation maneuvers are specially programmed and two separation schemes are developed by adjusting different ejection directions and ejection sequences to guarantee the non-collision between rigid bodies in the separation deployment. Finally, numerical case studies are presented for investigating the nonlinear dynamic behaviors of rigid bodies and demonstrating the effectiveness of separation schemes. Keywords:multi-rigid-body;separation deployment;ejection;constrain;collision
PDF (4862KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 罗操群, 孙加亮, 文浩, 胡海岩, 金栋平. 多刚体系统分离策略及释放动力学研究 1). 力学学报[J], 2020, 52(2): 503-513 DOI:10.6052/0459-1879-19-307 Luo Caoqun, Sun Jialiang, Wen Hao, Hu Haiyan, Jin Dongping. RESEARCH ON SEPARATION STRATEGY AND DEPLOYMENT DYNAMICS OF A SPACE MULTI-RIGID-BODY SYSTEM 1). Chinese Journal of Theoretical and Applied Mechanics[J], 2020, 52(2): 503-513 DOI:10.6052/0459-1879-19-307
( TianQiang, LiuCheng, LiPei , et al. Advances and challenges in dynamics of flexible multibody systems Journal of Dynamics and Control, 2017,15(5):385-405 (in Chinese)) [本文引用: 2]
( SunJialiang, TianQiang, HuHaiyan . Advances in dynamic modeling and optimization of flexible multibody systems Chinese Journal of Theoretical and Applied Mechanics, 2019,51(6):1565-1586 (in Chinese))
( HuHaiyan, TianQiang, ZhangWei , et al. Nonlinear dynamics and control of large deployable space structures composed of trusses and meshes Advances in Mechanics, 2013,43(4):390-414 (in Chinese))
( QiZhaohui, CaoYan, WangGang . Model smoothing methods in numerical analysis of flexible multibody systems Chinese Journal of Theoretical and Applied Mechanics, 2018,50(4):863-870 (in Chinese))
( CaoDengqing, BaiKunzhao, DingHu , et al. Advances in dynamics and vibration control of large-scale flexible spacecraft Chinese Journal of Theoretical and Applied Mechanics, 2019,51(1):1-13 (in Chinese))
( WangXiaojun, LüJing, WangQi . A numerical method for dynamics of planar multi-rigid-body system with frictional translational joints based on LuGre friction model Chinese Journal of Theoretical and Applied Mechanics, 2019,51(1):209-217 (in Chinese)) [本文引用: 1]
( GaoYingyuan, WangNiwei, LuZhou . The development research and construction suggestion of satellite internet constellations Journal of China Academy of Electronics and Information Technology, 2019,14(8):875-881 (in Chinese)) [本文引用: 1]
FoustJ . SpaceX's space-Internet woes: Despite technical glitches, the company plans to launch the first of nearly 12,000 satellites in 2019 IEEE Spectrum, 2018,56(1):50-51 [本文引用: 1]
SmythJ, KroupnikG, IrisS , et al. Radarsat constellation mission data policy// International Geoscience and Remote Sensing Symposium, Valencia, Spain, 2018 [本文引用: 1]
ChenT, WenH . Autonomous assembly with collision avoidance of a fleet of flexible spacecraft based on disturbance observer Acta Astronautica, 2018,147:86-96 [本文引用: 1]
ChenT, WenH, HuH , et al. On-orbit assembly of a team of flexible spacecraft using potential field based method Acta Astronautica, 2017,133:221-232
WongB, MisraA . Planar dynamics of variable length multi-tethered spacecraft near collinear Lagrangian points Acta Astronautica, 2008,63(11-12):1178-1187
ShanM, GuoJ, GillE . Review and comparison of active space debris capturing and removal methods Progress in Aerospace Sciences, 2016,80:18-32
ShiG, ZhuZ, ZhuZ . Dynamics and control of tethered multi-satellites in elliptic orbits Aerospace Science and Technology, 2019,91:41-48 [本文引用: 1]
( FanGaojie, BoLinhou, WeiChuanfen , et al. Safety analysis and simulation of spacecraft on-orbit releasing Spacecraft Environmental Engineering, 2017,34(4):403-409 (in Chinese)) [本文引用: 1]
Kιlι??, ScholzT, AsmaC . Deployment strategy study of QB50 network of CubeSats// 6th International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 2013 [本文引用: 1]
HandschuhDA, BourgeoisE . Optimization of constellation jettisoning regards to short term collision risks Acta Astronautica, 2018,145:284-292 [本文引用: 1]
JeyakumarD, RaoB . Dynamics of satellite separation system Journal of Sound and Vibration, 2006,297(1-2):444-455 [本文引用: 1]
LiuP, ChenX, ZhaoY . Safe deployment of cluster-flying nano-satellites using relative E/I vector separation Advances in Space Research, 2019,64(4):964-981 [本文引用: 1]
ZhangJ, ZhouJ, DengY . Cubesat separation parameter optimization// 12th International Conference on Signal Processing and Communication Systems, Cairns,Australia, 2018 [本文引用: 1]
BridgesCP, SauterL, PalmerP . Formation deployment & separation simulation of multi-satellite Scenarios using SatLauncher// Aerospace Conference, Big Sky, MT,USA, 2011 [本文引用: 1]
WermuthM, GaiasG, D'AmicoS . Safe picosatellite release from a small satellite carrier Journal of Spacecraft and Rockets, 2015,52(5):1338-1347 [本文引用: 1]
( ShangXianyang, DuPeng, WangGuijiao , et al. Research of structural layout and inclined separation for one vehicle with triple-satellites Structure & Environment Engineering, 2018,45(1):7-11 (in Chinese)) [本文引用: 2]
De JalonJG, BayoE . Kinematic and Dynamic Simulation of MultiBody Systems: The Real-Time Challenge. New-York: Springer, 2011 [本文引用: 1]
De JalonJG, UndaJ, AvelloA . Natural coordinates for the computer analysis of multibody systems Computer Methods in Applied Mechanics and Engineering, 1986,56(3):309-327 [本文引用: 1]
AntmanSS, OsbornJE . The principle of virtual work and integral laws of motion Archive for Rational Mechanics and Analysis, 1979,69(3):231-262
WenH, ZhuZ, JinD , et al. Constrained tension control of a tethered space-tug system with only length measurement Acta Astronautica, 2016,119:110-117 [本文引用: 1]
NewmarkNM . A method of computation for structural dynamics Journal of the Engineering Mechanics Division, 1959,85(3):67-94 [本文引用: 1]
FungTC . Complex-time-step Newmark methods with controllable numerical dissipation International Journal for Numerical Methods in Engineering, 1998,41(1):65-93 [本文引用: 1]
ChungJ, HulbertG . A time integration algorithm for structural dynamics with improved numerical dissipation: The generalized-a method. Journal of Applied Mechanics-Transactions of the ASME, 1993,60(2):371-375 [本文引用: 1]
ArnoldM, BrülsO . Convergence of the generalized-$\alpha $ scheme for constrained mechanical systems Multibody System Dynamics, 2007,18(2):185-202 [本文引用: 1]
( ShaoHuiping, CaiChengwen . A modified lanczos algorithm for computing structural eigenvalued problems Chinese Journal of Applied Mechanics, 1988,5(4):76-81, 137 (in Chinese)) [本文引用: 1]
BuckleyS, FosnessE, GammillW . Deployment and release devices efforts at the air force research laboratory space vehicles directorate// AIAA Space 2001-Conference and Exposition, Albuquerque, NM, USA, 2018 [本文引用: 1]
( ZhongZuoyang, Zhang HaiLian, ZhouJianping , et al. Review of non-pyrotechnic connection and separation technology of spacecraft Manned Spaceflight, 2019,25(1):128-142 (in Chinese)) [本文引用: 1]
 ,*,2)
,*,2)
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT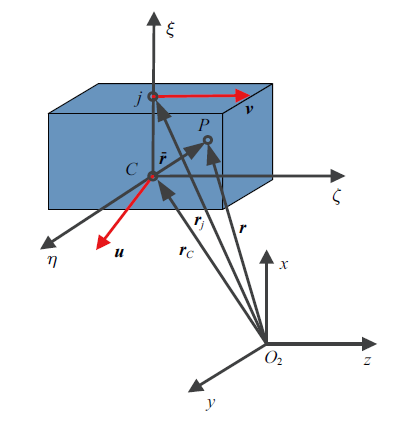 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT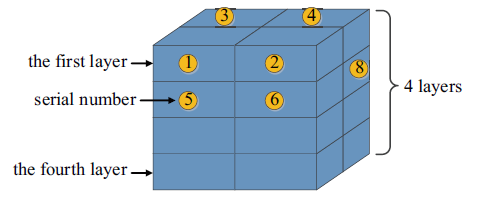 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT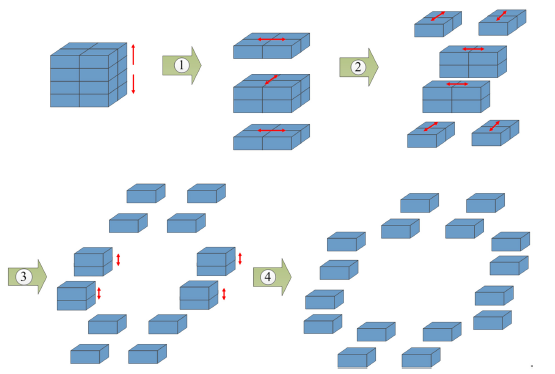 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT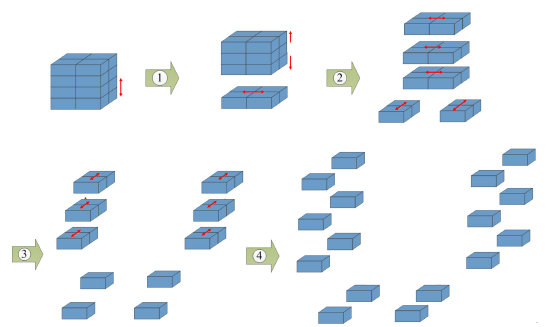 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}