 ,2), ��˳��, �γ�, ��С��ͬ�ô�ѧ�Ϻ��й����ͨ�ṹ�;���ϵͳ��ȫ�ص�ʵ����, �Ϻ� 201804
,2), ��˳��, �γ�, ��С��ͬ�ô�ѧ�Ϻ��й����ͨ�ṹ�;���ϵͳ��ȫ�ص�ʵ����, �Ϻ� 201804WAVE FUNCTIONS METHOD FOR CALCULATING THE DYNAMIC RESPONSE OF A TUNNEL IN UNSATURATED SOIL 1)
Guo Huiji, Di Honggui,2), Zhou Shunhua, He Chao, Zhang XiaohuiShanghai Key Laboratory of Rail Infrastructure Durability and System Safety, Tongii University, Shanghai 201804, ChinaͨѶ����: 2)�Һ��, ��������, ��Ҫ�о�����: �����ͨ����ϵͳ����ѧ. E-mail:2012dihonggui@tongji.edu.cn
�ո�����:2019-10-11��������:2020-02-17�����������:2020-03-18
| ��������: |
Received:2019-10-11Accepted:2020-02-17Online:2020-03-18
����� About authors

ժҪ
��ԷDZ��͵ػ�����������������ά������Ӧ��������, ����˲�������.����������Fl��gge����Բ����ģ��Բ����������,���������̡�����ɵ��������ģ��DZ��͵ػ�����.�ֱ���÷���������Լ�Helmholtzʸ���ֽⶨ����ⱡ��Բ���ǵ����Ʒ�����DZ������IJ�������.������-����������ر��洦��Ӧ����λ���Լ���϶����ѹ���ȱ߽�����,����ƽ�沨�����沨��ת������,ʵ�������������õ�λ��г�غ�ʱ��������������ϵͳ������Ӧ��������.ͨ������е��൯�Խ���2.5ά����Ԫ-�߽�Ԫ��������Ͷ����2.5ά����Ԫ-�߽�Ԫ���Լ�����DZ��ͽ���Pip in Pip��������ļ��������жԱ�, ��֤�˱��ļ��㷽���Ŀɿ���. ���,���ڸ÷���, ͨ�����������˲�ͬ���Ͷ��·DZ�����-����ϵͳ�Ķ�����Ӧ����.�������, ���Ͷȶ����嶯λ���볬��϶ˮѹ���ķ�ֵ��Ӧ�нϴ�Ӱ��.�÷����ķDZ��͵ػ��������˻���,Ҳ����������ͷ������͵ػ������൯�Եػ���������ϵͳ�Ķ�����Ӧ.
�ؼ��ʣ�
Abstract
This paper presents a wave functions method to calculate the three dimensional dynamic interaction between a circular tunnel and the surrounding unsaturated foundation soil. The tunnel lining is conceptualized as an infinite Fl��gge cylindrical shell, and the unsaturated foundation soil is conceptualized as a three-phase medium consisting of fluid, solid and gas. The motion equations of infinite Fl��gge cylindrical shell are solved by the separation of variable method, and the Helmholtz decomposition theorem is used to solve the unsaturated soil governing equations. Based on the boundary conditions of displacement, stress and pore fluid pressure at the unsaturated soil-tunnel interface and the ground surface, the dynamic interaction between the unsaturated soil and circular tunnel is solved when the tunnel invert subjected to a unit harmonic load. The transformation properties of plane wave functions and cylindrical wave functions are used to apply the boundary conditions expressed in both the rectangular and cylindrical coordinate systems before the coupling. The proposed method is verified by comparing with the results obtained by the existing 2.5 dimensional coupled FE-BE method for single phase elastic medium, 2.5 dimensional coupled FE-BE method for two phase saturated porous medium and Pip in Pip semi analytical method for three-phase unsaturated medium. Finally, by using the proposed method, the dynamic response of the unsaturated soil-tunnel system under different soil saturations is analyzed by a case study. The results show that saturation has a great effect on the dynamic response amplitude of soil displacement and excess pore water pressure. Because the three-phase medium simulating unsaturated soil can be reduced to two-phase medium or single-phase medium, this method can also be used to calculate and analyze the dynamic response of a circular tunnel buried in two-phase saturated soil or in single-phase elastic soil after the degeneration of the calculation parameters of unsaturated soil.
Keywords��
PDF (777KB)Ԫ������ά�����������������EndNote|Ris|Bibtex�ղر���
�������ø�ʽ
���ۼ�, �Һ��, ��˳��, �γ�, ��С��. �DZ�����-����ϵͳ������Ӧ����IJ������� 1). ��ѧѧ��[J], 2020, 52(2): 591-602 DOI:10.6052/0459-1879-19-280
Guo Huiji, Di Honggui, Zhou Shunhua, He Chao, Zhang Xiaohui.
����
�����г�����ʱ, �ֹ����ᾭ�ɹ�������������ػ�����, ����ػ������ܱ߽�(��)�������[1]. ���ŵ��������Ŀ��ٷ�չ,�����г���������Ļ��������������������������������[2-4].Metrikine��[5]��������Ϊ�����ڵ��������е�ŷ����, �����˶�ά����ģ��, ̽�����������ر��ں㶨���ƶ���г�غɺ�����غ������µĶ�����Ӧ. Forrest��Hunt[6]���ñ���Բ����ģ������, ����Բ����ģ��ػ�, ���������-����ϵͳ������Ӧ��ά��������㷽��, ��PiP�������.Yuan��[7]��������Ϊ�����ڵ���ռ���п�Բ����, ����ƽ�沨�����沨ת��, ����˵���ռ����õ��������Ķ�����Ӧ�պϽ�.He��[8]ͨ�����벨��ƽ�ƹ�ʽ, ����˵��൯��ռ�������˫������ϵͳ������Ӧ�Ļ�����. ��ֵ������, Thiede��[9]���ö�ά����Ԫ���о��˵����г�����Ӧ����.Bian��[10]����2.5ά����Ԫ���о��˵����г���������ĵػ���.Sheng��[11]���ò�����ɢ��, ������2.5ά��������Ԫ-�߽�Ԫ��, �о��˵���͵����г��غ����������Ӧ����.Degrande��[12]����Floquet�任, ���������������Ԫ-�߽�Ԫ��, ��������Ԥ��; Hung��Yang[13]����������ģ��ػ�, �����2.5ά����Ԫ-����Ԫ��, ģ������г���������ĵر���. ����, ��Ը�ˮ�ز������, ���****����Biot���Ͷ����ģ�ⱥ������, ������ģ�ͻ������˷�չ�Ľ�: �籥��ȫ�ռ��PiP�������[14-15];-���Ͱ�ռ�IJ���ת���պϽ�[16-17]�Լ����Ͱ�ռ��2.5ά����Ԫ-�߽�Ԫ��[18-20]��.
Ȼ��, ���õ���������������ģ��ػ�����ʵ�����, �迼�DZ��ͶȶԶ�����Ӧ��Ӱ��[21-22]. ������[23]����V-Gģ��, �����˷DZ������Ķ������Ʒ���, ����˷DZ������ػ�������Ķ�����Ӧ.�߹��˵�[24]����ΰ����[25]���ڷDZ��ͽ��ʲ�������, ��������Ԫ���о����ƶ��غ�������·���͵ػ��Ķ�����Ӧ.�����ɵ�[26]��������[27]���ڷDZ������Ķ������Ʒ���, �����˷DZ����������Ķ�����Ӧ����. ���ܼ��㷽������, Ŀǰ���ڷDZ�����-����ϵͳ������Ӧ���о�����.���鲨[28]������˼�г�غ������·DZ�����������Բ������ϵͳ������Ӧ��2ά������.���ǵ�2ά���㷽��������ϵͳ��3ά��������, �Һ��[29]��������[15]�Ļ�����,��һ������˷DZ�����-����ϵͳ������Ӧ�����3άPiP�������.������2ά��3ά��[28-29]���ٶ�������������⾶Ϊ�����, ����Ϊȫ�ռ��㷨, ���������ʵ��ռ�ػ�����Ķ�����Ӧ.
Ϊ�о��DZ��Ͱ�ռ�������Բ������ϵͳ�Ķ�����Ӧ����,���Ľ�Բ��������ΪFlügge����Բ����, ������ķDZ��͵ػ�����Ϊ�������̡�����ɵ��������,�ֱ���÷�����������Բ���ǵ����Ʒ���, Helmholtzʸ���ֽⶨ�����DZ������IJ�������, ��������-�������洦���ر��ȱ߽�����, ����ƽ�沨�����沨��ת������������, ������ƶ���г�غ��·DZ��Ͱ�ռ�ػ�������Բ������������Ӧ����IJ�������, ���ڸ÷���, ̽���˷DZ��͵ػ���-����ϵͳ�Ķ�����Ӧ����.
1 ���Ʒ��̺����
������������Ϊ������Flügge����Բ����, �����ɾ��ʡ�����ͬ�ԡ��ߵ��Բ������.���DZ��͵ػ�����Ϊ�������̡�����ɵ��������.��������а���ͼ1��ʾ��Բ������ϵ($r$, $\theta$, $z)$��ֱ������ϵ($x$, $y$, $z)$��������ϵ. ͼ��, $O_{1}$, $O_{2}$, $O_{3}$, $O_{4}$Ϊ4���۲��:-$O_{1}$��λ���غ����õ����Ϸ��ر�, $O_{3}$��λ���غ����õ��·������ײ�, $O_{2}$, $O_{4}$��ֱ�λ��$O_{1}$, $O_{3}$���20 m��.ͼ1
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ1�DZ�����-����ϵͳ������ϵ
Fig. 1Unsaturated soil-tunnel system and coordinate
ͼ��: $q$���������غ�; $v_{0}$�����غ��ƶ��ٶ�; $d$�������������߾���ر���ֱ����; $r_{1}$�������������뾶.
1.1 �������Ʒ���
����������ΪFlügge����Բ����, ���÷���������Կ�����Ʒ��̽������, �ɵü�г�غ������¿���ƽ�ⷽ�̵ľ������ʽ[6]ʽ��, �ϱ�"\^{}"����$z$��������Ӧ�IJ�����; �ϱ�"$\sim$"��ʾʱ��$t$����Ӧ��Ƶ��; $m$��ʾ����ģ̬; $\hat{{\tilde{{U}}}}_{mz}$,$\hat{{\tilde{{U}}}}_{m\theta}$, $\hat{{\tilde{{U}}}}_{mr}$��$\hat{{\tilde{{q}}}}_{mz}$, $\hat{{\tilde{{q}}}}_{m\theta }$,$\hat{{\tilde{{q}}}}_{mr}$�ֱ��ʾ��Ƶ��-��������λ�ƺ�Ӧ���ڵ�������ģ̬��$m$�µ�������;ʽ(1)����������ʽ�����¼A.
1.2 �DZ��͵ػ�����������
���DZ��͵ػ�����Ϊ�����̡�����ɵ��������, ��ʵ�ò�����������[23]ʽ��, $a=1-K_{\rm b} /K_{\rm s}$, $K_{\rm b} =\lambda +2\mu /3$,�b$b_{\rm l}=n_0 S_r \eta _{\rm l} /(k_{{\rm rl}} \kappa )$, $b_{\rm g} =n_0 (1-S_r )\eta_{\rm l} /(k_{{\rm rg}} \kappa)$, ${\mathop{\rho}\limits^\smallfrown}_{\rm s} =(1-n_0 )\rho_{\rm s}$, ${\mathop{\rho}\limits^\smallfrown}_{\rm g} =n_0 (1-S_r )\rho _{\rm g}$, ${\mathop{\rho}\limits^\smallfrown}_{\rm l} =n_0 S_r \rho _{\rm l} $; �±�s, b, l, g�ֱ���������������Ǽܡ���϶ˮ�Լ������������ķ���; �ϱ�"'"��"''"�ֱ��ʾһ�ס�����; $u$��ʾλ��ʸ��; $p$��ʾ����ѹ��; $\rho $��ʾ�ܶ�; $\lambda $, $\mu$Ϊ���Ǽ�Lame����; $\gamma $Ϊ��ЧӦ��ϵ��. $K$Ϊѹ��ģ��; $n_{0}$, $S_{r}$�ֱ�Ϊ�����϶���뱥�Ͷ�;$\eta$Ϊ�������ϵ��; $k_{\rm rl}$, $k_{\rm rg}$�ֱ�ΪҺ���������ϵ��; $\kappa $Ϊ��������.
�DZ��������������������������Է���Ϊ
ʽ��, $a_{11}$, $a_{12}$, $a_{13}$, $a_{21}$, $a_{22}$, $a_{23}$����ʽ����¼B.
ͨ������DZ��Ͷ���ʵ�ƽ���ܶ�
��϶ˮ�����Ǽܵ����λ��
���������Ǽܼ�����λ��
�������������̷���(2a)д��$u_{\rm b}-v-w$�ı�����ʽ��
���������Է���(2b)д��$u_{\rm b}-v-w$�ı�����ʽ��
������Ӧ������ʽ
ʽ��, $\sigma_{ij}$Ϊ����Ԫ��Ӧ��; $e$Ϊ���Ӧ��; $\varepsilon_{ij}$ΪӦ�����; $\delta_{ij}$Ϊ�����ڿ˷���;
$p$Ϊ��Ч��϶����ѹ��. ����������������ʽ����¼C.
����Helmholtzʸ���ֽⶨ��, ʽ(4)�����Ǽ�λ��$u_{\rm b}$�����塢��������ڹǼܵ�λ��$v$, $w$,�ñ����ƺ�ʸ���Ʒֱ��ʾΪ
ʽ��, �±�SH, SV, P�ֱ����SH, SV, P���ķ���$\varphi$, $\phi$, $\chi $�ֱ�Ϊ���Ǽܲ��֡�Һ�岿���Լ����岿�ֵ��ƺ���. ${\rm e}_z$��ʾ$z$����λ����.
������̬��Ӧ, ��ʽ(5)����ʽ(4a), ��ʱ��$t$����Fourier�任��Ƶ���, �õ��������鷽��
ʽ��$ \omega$Ϊ��Ƶ��.
Ϊ�����ַ�����(6)�з����, ��������ϵ����������ʽΪ0������, ��
ʽ��, $Ba$, $Bb$, $Bc$, $Bd$, $Be$����ʽ����¼D.
����ʽ(7), �ɵ���������Helmholtz����
ʽ��, $k_{\rm p1}$, $k_{\rm p2}$, $k_{\rm p3}$�ֱ�Ϊ�DZ��͵ػ��е��ݲ�����; $k_{\rm s}$Ϊ�DZ��͵ػ��еĺᲨ����.
����ʽ(6)��ʽ(8), ���Ƶ�����, ���ƺ����ɱ���Ϊ
ʽ��, $\mu _{\rm 1l}$, $\mu _{\rm 2l}$, $\mu _{\rm 3l}$, $\mu _{\rm 1g}$, $\mu_{\rm 2g}$, $\mu _{\rm 3g}$, $\mu _{\rm sl}$, $\mu _{\rm sg}$�ı���ʽ����¼E.
�����������õķDZ��Ͱ�ռ��д�������ɢ����, ��Բ��������������Լ��ر�ˮƽ��, ����ܵIJ����а������е����沨�Լ����е�ƽ�沨���ֲ�.�ο�����[16]�����ʽ(9), �ɵõ�ֱ������ϵ�������沨��λ���ƺ���Ϊ
ʽ��, "--"����$y$������; $\hat{{\bar{{\tilde{{U}}}}}}_1^d$, $\hat{{\bar{{\tilde{{U}}}}}}_2^d$, $\hat{{\bar{{\tilde{{U}}}}}}_3^d$, $\hat{{\bar{{\tilde{{U}}}}}}_4^d$, $\hat{{\bar{{\tilde{{U}}}}}}_5^d$�ֱ�ΪSH, SV, P1, P2, P3��ֱ��������Ƶ�����������в���λ���ƺ���; $k_{y}$, $k_{z}$�ֱ�Ϊ$y$����$z$����; $k_{{\rm s}x} =\sqrt {k_{\rm s}^2 -k_y^2-k_z^2 } $ΪS��$x$����, ���������Ǹ�; $k_{{\rm p}1,2,3 x} =\sqrt {k_{{\rm p}1,2,3}^2 -k_y^2 -k_z^2 } $ΪP��$x$����, ���������Ǹ�.ֱ�����������в�λ���ƺ���$\hat{{\bar{{\tilde{{U}}}}}}^u$ֻ�轫ʽ(10a)��$k_{{\rm s}x}$, $k_{{\rm p}1,2,3 x}$�滻Ϊ$-k_{{\rm s}x}$, $-k_{{\rm p}1,2,3 x}$����.
Բ������ϵ�����в���λ���ƺ���Ϊ
ʽ��, $\hat{{\tilde{{U}}}}_{m1}^o$, $\hat{{\tilde{{U}}}}_{m2}^o$, $\hat{{\tilde{{U}}}}_{m3}^o$, $\hat{{\tilde{{U}}}}_{m4}^o$, $\hat{{\tilde{{U}}}}_{m5}^o $�ֱ�ΪSH, SV, P1, P2, P3��Բ��������Ƶ�����������в���λ���ƺ���; $H_m^{(1)}$Ϊ��һ��Hankel����; $k_{{\rm s}r} =\sqrt {k_{\rm s}^2 -k_z^2 } $ΪS��$r$����, ���������Ǹ�; $k_{{\rm p}1,2,3 r} =\sqrt {k_{{\rm p}1,2,3}^2 -k_z^2 } $ΪP��$r$����, ���������Ǹ�. Բ�������������в�λ���ƺ���$\hat{{\tilde{{U}}}}_m^r $ֻ�轫ʽ(10b)��$H_m^{(1)} $�滻Ϊ��һ��Bessel����J$_m^{(1)}$����.
��ʽ(10)����ʽ(4b)��ֱ������ϵ��Բ������ϵ�¿�ѹ�ı���ʽ, ��ʽ(11)��ʾ
ʽ��, $\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 3}}^d$, $\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 4}}^d$, $\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 5}}^d $�ֱ�ΪP1, P2,P3��ֱ��������Ƶ�����������в��Ŀ�϶ˮѹ���ƺ���; $\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 3}}^d$, $\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 4}}^d$, $\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 5}}^d $�ֱ�ΪP1, P2,P3��ֱ��������Ƶ�����������в�������ѹ���ƺ���; $\hat{{\tilde{{\vartheta }}}}_{m{\rm 3}}^o$, $\hat{{\tilde{{\vartheta }}}}_{m{\rm 4}}^o$, $\hat{{\tilde{{\vartheta }}}}_{m{\rm 5}}^o $�ֱ�ΪP1, P2, P3��Բ��������Ƶ�����������в��Ŀ�϶ˮѹ���ƺ���; $\hat{{\tilde{{\vartheta }}}}_{{\rm g }m3}^o$, $\hat{{\tilde{{\vartheta }}}}_{{\rm g }m4}^o$, $\hat{{\tilde{{\vartheta }}}}_{{\rm g }m5}^o$�ֱ�ΪP1, P2, P3��Բ��������Ƶ�����������в�������ѹ���ƺ���; $A_{{\rm p}1,2,3}^{\rm l} ,A_{{\rm p}1,2,3}^{\rm g} $����ʽ����¼F.
��ʽ(10)��ʽ(11)����ʽ(4c)��ֱ������ϵ��SH, SV, P1, P2, P3Ƶ�����������в�����Ӧ���ƺ���$\hat{{\bar{{\tilde{{\varPsi }}}}}}_1^d$, $\hat{{\bar{{\tilde{{\varPsi }}}}}}_2^d$, $\hat{{\bar{{\tilde{{\varPsi }}}}}}_3^d$, $\hat{{\bar{{\tilde{{\varPsi }}}}}}_4^d$, $\hat{{\bar{{\tilde{{\varPsi }}}}}}_5^d $����ʽ, �Լ�Բ������ϵ��SH, SV, P1, P2, P3Ƶ�����������в�����Ӧ���ƺ���$\hat{{\bar{{\tilde{{\varPsi }}}}}}_{m1}^o$, $\hat{{\bar{{\tilde{{\varPsi }}}}}}_{m2}^o$, $\hat{{\bar{{\tilde{{\varPsi }}}}}}_{m3}^o$, $\hat{{\bar{{\tilde{{\varPsi }}}}}}_{m4}^o$, $\hat{{\bar{{\tilde{{\varPsi }}}}}}_{m5}^o $����ʽ,�ֱ�Ϊ
ʽ��, $E$1, $E$2, $E$3, $E$4, $E$5, $E$6����ʽ����¼G.
����Բ������ϵ��ֱ������ϵ�¸��ನ��λ��, ��ѹ�Լ�Ӧ����������ʽ,��λ���ܳ�$\hat{{\tilde{{u}}}}$, ��ѹ�ܳ�$\hat{{\tilde{{p}}}}_{\rm l,g}$�Լ�Ӧ���ܳ�$\hat{{\tilde{{\tau }}}}$��Ƶ��-���������ʽ, ��ʽ(13)��ʾ
ʽ��, $X_j^z$ $(j=1$, 2, 3, 4, 5)�ֱ�Ϊֱ����������SH, SV, P1, P2, P3���ƺ����Ĵ���ϵ��; $X_{mj}^c$ $(j=1$, 2, 3, 4, 5; $m$��ֵ����ȡ$-20\sim 20$��Χ�ڵ�����)ΪԲ����������SH, SV, P1, P2, P3���ƺ����Ĵ���ϵ��.
Ϊ�������沨��ƽ�沨��ͬһ�߽�������������, ����Bessel������ָ���������ת����ϵ[8], ��ʽ(14)��ʾ
ʽ�� $\beta =\arcsin (k_y /k_r )$.
��ʽ(14)����ʽ(10) $\sim\!$ʽ(12)�����沨������ƽ�沨�������ת����ϵ, ��ʽ(15)��ʾ
ʽ��, $I_{mj} (k_y ,\omega )$, $h_j $����ʽ����¼H.
�ٶ��ر�Ӧ��Ϊ0�ҵر�Ϊˮ�߽�, ���ʽ(13)��ʽ(15), �ɵ�
��ʽ(16)��
ʽ��, $K_{jj'} $����¼I.
��ʽ(17)����ʽ(13)��Բ���������ܳ�����ʽ����
\subsection{������
����ʽ(1)�����ƽ�ⷽ��, ����������ػ��������洦��λ����Ӧ��������������,�ɵ�
��������������ˮ, ����, ����, �������������ѹ����ѹ�ķ�����Ϊ0, ��
���ʽ(19)��ʽ(20), �����õ�����ϵ��$X_j^z$, $X_{mj}^c $, ������ϵ������ʽ(13), ���ɵõ���ռ�����������. �����غ�Ϊ�ƶ��غ�,��$z_{0}=z-v_{0}t$, ��λ�ƺ�Ӧ�����������ʱ���ص���,������غ�һ���ƶ�������ϵ($x$, $y$, $z_{0})$��, ���������һ����̬����[15].ͨ��˫�ظ���Ҷ��任, ���ɵõ�ʱ��Ϳռ�����ϵͳ�Ķ�����Ӧ.
2 �㷨����֤
�ڱ�������ķDZ��͵ػ���-����������Ӧ���㷽����, �����DZ��͵ػ�������$S_{r}$, $S_{e}$������1, $A_{\rm s}$������0,��ػ������˻�Ϊ����͵ػ���; �����DZ��͵ػ�������$S_{r}$������$S_{w0}$, ��϶��$n_{0}$������0, ��ػ����˻�Ϊ���൯�Եػ���[30]. Ϊ��֤�����㷨�Ŀɿ���, �����ķ����ļ������ֱ�����е�2.5ά����Ԫ-�߽�Ԫ���Լ�ȫ�ռ�PiP��������ļ��������жԱȷ���.2.1 ���൯�Եػ���
��$S_{r}=0.06$, $n_{0}=0.001$, �����ļ��㷽���еĵػ������˻�Ϊ���൯�Եػ���, ���������[31,32]�е�2.5ά����Ԫ-�߽�Ԫ�����жԱ�, ��������ο�����[31]. �̶���λ��г�غ���������������($x=-2.75$ m, $y=0$ m, $z=0$ m)��, �ֱ�ȡ�ر������۲��($O_{1}$: $x=10$ m, $y=0$ m, $z=0$ m; $O_{2}$: $x=10$ m, $y=20$ m, $z=0$ m)���жԱ���֤, ��������λ����Ӧ��Ƶ�ʵı仯������ͼ2��ʾ. ���Կ���, �����㷨�ļ���������е��൯�Եػ�����2.5ά����Ԫ-�߽�Ԫ���ļ������ǺϽϺ�,��֤�˽��DZ��͵ػ����˻�Ϊ���൯�Եػ���ʱ, ���ķ����������Ŀɿ���.2.2 ����͵ػ���
��$S_{r}=0.999$, $A_{\rm s}=0$, �����ĵķDZ��͵ػ����˻�Ϊ����͵ػ���, ����еı��͵ػ���2.5ά����Ԫ-�߽�Ԫ�����жԱ�, ��������ο�����[20]. ����ʱ�ƶ���λ��г�غ�($v_{0}=16.7$ m/s, $f_{0}=20$ Hz)��������������($x=-2.75$ m, $y=0$ m, $z_{0}=z-v_{0}t=0$ m)��. ͼ3�����������ײ�����λ�����ѹ��ֵ����������ķֲ�. ��ͼ3���Կ���, ���ķ����ļ���������еı�����2.5ά����Ԫ-�߽�Ԫ���ļ������ǺϽϺ�, ��֤�˽����ļ��㷽���зDZ��͵ػ����˻�Ϊ����͵ػ���ʱ,���ķ����������Ŀɿ���.ͼ2
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ2�˻����㷨����֤(�DZ��͵ػ����˻�Ϊ���൯�Եػ���)
Fig. 2Verification of the method after the unsaturated soil degenerate into single-phase elastic soil
ͼ3
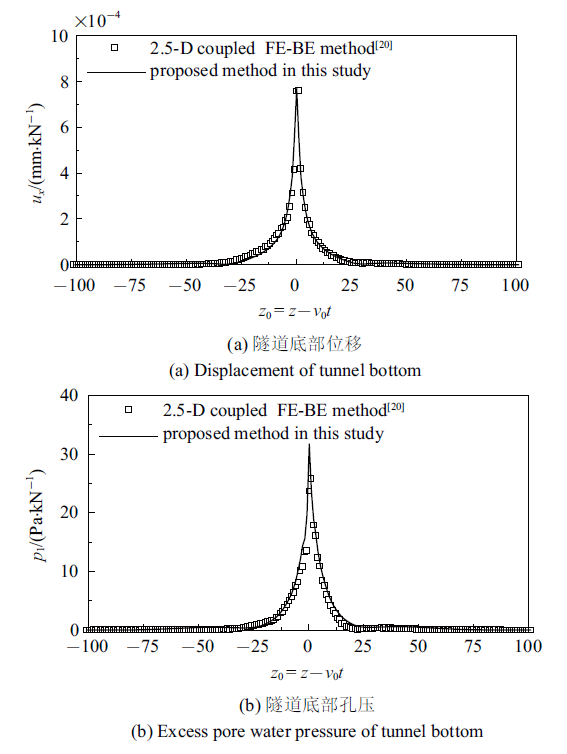 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ3�˻����㷨����֤(�DZ��͵ػ����˻�Ϊ���͵ػ���)
Fig. 3Verification of the method after the unsaturated soil degenerate into two-phase saturated soil
2.3 ȫ�ռ�DZ��͵ػ���
��һ����֤��������ķDZ��Ͱ�ռ�ػ���-����ϵͳ������Ӧ���㷽���Ŀɿ���. ���ڼ���������δ�����ڷDZ��Ͱ�ռ�ػ���-����ϵͳ������Ӧ���о�, Ϊ��, ѡȡ���еķDZ���ȫ�ռ�ػ�����PiP�������[29]���жԱ���֤.�ֱ�ѡȡ���������߾���ر���ֱ����$d=25$ m��$d=5$ mʱ���м���ͶԱȷ���, �����뾶$r_{1}=3$ m, �����������$h=0.25$ m. ��������Ϊ����������, ������ģ��$E_{t}=50$ GPa, ���ɱ�$\upsilon_{t}=0.3$, �ܶ�$\rho_{t}=2500$ kg/m$^{3}$, ��������Ϊ$\beta_{t}=0.03$. �DZ������IJ����ο�����[23, 33]. �����ƶ���λ��г�غ�($v_{0}=16.7$ m/s, $f_{0}=20$ Hz)��������������($x=-2.75$ m, $y=0$ m, $z_{0}=0$ m)��ʱ, �����ײ�����Ķ�����Ӧ, �����ͼ4��ʾ. ��ͼ4���Է���, ���ķ�������������ײ�����Ķ�����Ӧ��ȫ�ռ�PiP��������ļ����������Ǻ�,��֤�˱��ļ��㷽���Ŀɿ���.ͼ4
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ4�DZ��͵ػ����Ա���֤
Fig. 4Verification by comparison with the results obtained by existing tunnel model
3 ��������
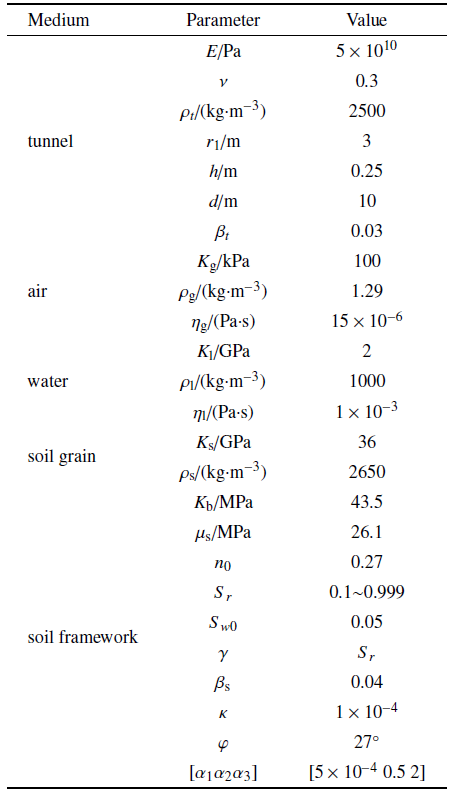
���ڱ���������㷨,�ص��о��̶���г�غ������±��ͶȶԵػ���-����ϵͳ������Ӧ��Ӱ��.Բ�����������ͷDZ��͵ػ��������������1��ʾ, ����,����������������ο�����[33]���Ϻ���������,�DZ��͵ػ����ο�����[23]������ɰ������, ����1��ʾ.ͼ5�����˹̶���г�غ���������������($x=-2.75$ m, $y=0$ m,$z_{0}=z-v_{0}t=0$ m)��ʱ, ��ͬλ�ô�($O_{1}$, $O_{2}$, $O_{3}$, $O_{4})$��������λ�Ʒ�ֵ�漤��Ƶ��$f_{0}$�ı仯����,����ʱ�����˲�ͬ�ı��Ͷ�($S_{r}=1$, 0.9, 0.7, 0.5). ��ͼ5���Կ���,����ͬ�ļ���Ƶ�ʵ���ͬ�ı��Ͷ���, ��������λ�Ʒ�ֵ���ڲ���,�������ڱ��Ͷȵĸı�һ���������������ЧӦ���ĸı�,��һ������������嶯����ģ���ı仯,���߹�ͬ����ʹ�ò�ͬ���Ͷ�״̬������λ�Ʒ�ֵ���ڲ���.
Table 1
��1
��1���������ͷDZ������������
Table 1
 |
�´��ڴ�|����CSV
ͼ5
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ5��ͬ�ر��۲��λ��Ƶ������
Fig. 5Frequency response curves of soil displacement of different observation points on ground surface
��ͼ5�л����Կ���, ��������λ�����غɼ���Ƶ�ʵı仯���߳��ֳ����Ե�������,����Ҫ�����ڵر������沨�ͺ�, �ݲ��ĸ���ЧӦ����[6].ͬʱ�ڲ�ͬ���Ͷ���, ����λ��Ƶ������ֵ�����λ�õIJ�ͬ.����Forrest��[6]���о�,Ƶ������ֵ����ֵ�λ���������в��Ĵ����ٶȴ��������.���ӷDZ��������Ʒ�������пɵ�, ���Բ����ٱ���ʽ$c=\omega /Re(k)$��$k$ֵ�뱥�Ͷȴ��ڹ���.���, ���履�Ͷȵı仯������Ƶ�캯����ֵ��λ�õĸı�.
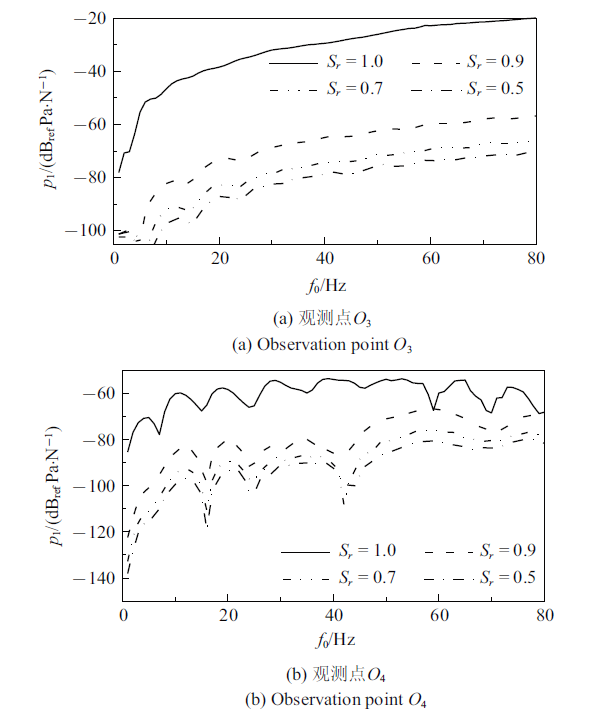
ͼ6Ϊ��ͬ���Ͷ��������·��۲��$O_{3}$��$O_{4}$�����峬��϶ˮѹ����Ƶ������. ��ͼ6���Կ���, ���Ͷ�ԽС,���峬��϶ˮѹ��ԽС. ����, �����Կ���, �����Ͷȴ�1.0��Ϊ0.9ʱ,����϶ˮѹ���½����ȴ�, ��ԭ�����ڵ����履�ͶȽӽ�1ʱ,�����Ա�������ʽ������Һ����, ������������ģ��ԶС��Һ������ģ��,�����������ĺ���������, ��Ч��϶��������ģ��Ѹ���½�,ʹ�õ�Ч��϶����ֵ�������С, ��ɳ���϶ˮѹ��Ѹ���½�. �ۺ�ͼ5��ͼ6��֪,���Ͷȶ�ϵͳ������Ӧ���ڽϴ�Ӱ��, ���ڷDZ��͵ػ���,��������������ӦʱӦ���DZ��Ͷȵ�Ӱ��.
ͼ6
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ6��ͬ�۲�㳬��϶ˮѹ��Ƶ������
Fig. 6Frequency response curves of pore water pressure at different observation points
4 ����
(1)��������˷DZ�����-����ϵͳ������Ӧ����IJ�������. �÷����ļ���������е�2.5ά����Ԫ-�߽�Ԫ���Լ�ȫ�ռ�PiP��������ļ��������ǺϽϺ�, ��֤�˱��ļ��㷽���Ŀɿ���.(2)���������������, ���Ͷȶ�����λ���볬��϶ˮѹ���ķ�ֵ�нϴ�Ӱ��. ���, ���ڷDZ��͵ز��е�����ϵͳ, ������ϵͳ������Ӧʱ, ��������Ϊ������ʶ��ǵ�����ʻ�����������б�Ҫ��.
(3)�����㷨�е��������(�DZ��͵ػ���)���˻�Ϊ�������(���͵ػ���)�������(���Եػ���). ͨ�������˻�, ���λ��Ӧ��Э���Լ���������������,�÷����ɽ�һ����չΪ���൯�Եػ���, ���͵ػ���, �DZ��͵ػ������������·ֲ�ػ���-����ϵͳ�������㷽��.
��¼
��¼A
\begin{eqnarray*} && S=\frac{-r_1 (1-\upsilon^2 )}{Eh}\left[ {{\begin{array}{*{20}c} {s_{11} } & {s_{12} } & {s_{13} } {s_{21} } & {s_{22} } & {s_{23} } \\ {s_{31} } & {s_{32} } & {s_{33} } \\ \end{array} }} \right] \\ &&s_{11} =\frac{\rho _t r_1 (1-\upsilon ^2)}{E}\omega ^2-r_1 \xi ^2-\frac{(1-\upsilon )}{2r_1 }\left(1+\frac{h^2}{12r_1^2 }\right)m^2\\ &&s_{12} =-\frac{(1+\upsilon )}{2}\xi m\\ &&s_{13} =-\upsilon {\rm i}\xi +\frac{h^2}{12}({\rm i}\xi )^3+\frac{h^2}{12r_1^2 }\frac{(1-\upsilon )}{2}{\rm i}\xi m^2\\ &&s_{21} =-\frac{(1+\upsilon )}{2}\xi m\\ &&s_{22} =\frac{\rho _t r{ }_1(1-\upsilon ^2)}{E}\omega ^2-\frac{r_1 (1-\upsilon )}{2}\left(1+\frac{h^2}{4r_1^2 }\right)\xi ^2-\frac{1}{r_1}m^2 \\ &&s_{23} =-\frac{\rm i}{r_1}m-{\rm i}\frac{h^2}{12}\frac{(3-\upsilon )}{2r_1 }\xi ^2m,\\ &&s_{31} =\upsilon {\rm i}\xi -\frac{h^2}{12}({\rm i}\xi )^3-\frac{h^2}{12r_1^2 }\frac{(1-\upsilon )}{2}{\rm i}\xi m^2 \\ &&s_{32} =\frac{{\rm i}}{r_1 }m+{\rm i}\frac{h^2}{12}\frac{(3-\upsilon )}{2r_1 }\xi ^2m \\ &&s_{33} =\frac{\rho _t r_1 (1-\upsilon ^2)}{E}\omega ^2-\frac{h^2}{12}\left(r_1 \xi ^4+\frac{2}{r_1 }\xi ^2m^2+\frac{1}{r_1^3 }m^4\right)- \\&&\qquad\frac{1}{r_1 }+\frac{h^2}{12r_1^3 }(2m^2-1) \\ &&\hat{{\tilde{{q}}}}_{mz} =0,\ \hat{{\tilde{{q}}}}_{m\theta } =0,\ \hat{{\tilde{{q}}}}_{mr} =\frac{1}{r_1 }\delta (\omega -2\pi f_0 +k_z v_0 ){\rm e}^{-{\rm i}m\pi } \end{eqnarray*}����, $\xi$Ϊ��$z$������; $h$Ϊ�ǵĺ��; $E$Ϊ��������ģ��; $\nu$Ϊ���岴�ɱ�;$\rho_{t}$Ϊ�����ܶ�; $q_{r}$, $q_{\theta }$, $q_{z}$�ֱ�Ϊ��������������$r$, $\theta$,$z$��ľ�Ӧ��; $f_{0}$Ϊ����Ƶ��.
��¼B
\begin{eqnarray*} && a_{11} =\frac{c_1 A_{22}}{A_{11} A_{22} -A_{12} A_{21} },\ \ a_{12} =\frac{A_{22} A_{13} -A_{12} A_{23} }{A_{11} A_{22} -A_{12} A_{21} }\\ && a_{13} =\frac{A_{22} A_{14} -A_{12} A_{24} }{A_{11} A_{22} -A_{12} A_{21} },\ \ a_{21} =-\frac{c_1 A_{21} }{A_{11} A_{22} -A_{12} A_{21} }\\ && a_{22} =\frac{A_{11} A_{23} -A_{21} A_{13} }{A_{11} A_{22} -A_{12} A_{21} },\ \ a_{23} =\frac{A_{11} A_{24} -A_{21} A_{14} }{A_{11} A_{22} -A_{12} A_{21} } \\ && A_{11} =\frac{c_2 \gamma -n_0 S_r }{K_{\rm s} }+\frac{n_0 S_r }{K_{\rm l} }\\&&A_{12} =\frac{c_2 \left(1-\gamma \right)-n_0 \left(1-S_r \right)}{K_{\rm s} }+\frac{n_0 \left(1-S_r \right)}{K_{\rm g} }\\ && A_{13} =n_0 S_r ,\ \ A_{14} =n_0 \left(1-S_r \right),\ \ A_{21} =A_s -\frac{S_r \left(1-S_r \right)}{K_{\rm l} }\\ && A_{22} =\frac{S_r \left(1-S_r \right)}{K_{\rm g} }-A_s\ \ A_{23} =-A_{24} =-S_r \left(1-S_r \right) \\ && c_1 =1-n_0 -\frac{K_{\rm b} }{K_{\rm s} },\ \ c_2 =1-\frac{K_{\rm b} }{K_{\rm s} }\\&&A_s =-\alpha _1 \alpha _2 \alpha _3 \left(1-S_{w0} \right)\left(S_e \right)^{\frac{\alpha _2 +1}{\alpha _2 }}\left[\left(S_e \right)^{-\frac{1}{\alpha _2 }}-1\right]^{\frac{\alpha _3 -1}{\alpha _3 }} \\ && K_{\rm b} =\lambda +\frac{2}{3}\mu ,\ \ S_e =\frac{S_r -S_{w0} }{1-S_{w0} }\\&&\mu =\mu _s +\frac{2050}{\alpha }\ln \left(\sqrt {Se^{-2}-1} +Se^{-1}\right)\tan \varphi\\&& \lambda =\frac{2\upsilon _s \mu }{1-2\upsilon _s } \end{eqnarray*}����, $S_{w0} $ΪҺ���Լ�����Ͷ�; $\alpha_{1}$, $\alpha_{2}$, $\alpha_{3}$�ֱ�Ϊ��ϲ���, $\upsilon_{\rm s} $Ϊ���岴�ɱ�; $\varphi $������ʱ����Ħ����; $\mu_{\rm s}$�ֱ�Ϊ���履��״̬�µĶ�����ģ��.
��¼C
\begin{eqnarray*} &&\lambda _c =\lambda +c_2 \gamma b_{11} +c_2 \left(1-\gamma \right)b_{21}\\&& M=c_2 \gamma b_{12} +c_2 \left(1-\gamma \right)b_{22} \\&& N=c_2 \gamma b_{13} +c_2 \left(1-\gamma \right)b_{23} ,\ \ b_{11} =\frac{c_2 A_{22} }{A_{11} A_{22} -A_{12} A_{21} }\\&&b_{12} =\frac{1}{n_0 S_r}a_{12},\ \ b_{13} =\frac{1}{n_0(1-S_r)}a_{13}\\&&b_{21} =-\frac{c_2 A_{21} }{A_{11} A_{22} -A_{12} A_{21} },\ \ b_{22} =\frac{1}{n_0 S_r}a_{22}\\&&b_{23} =\frac{1}{n_0(1-S_r)}a_{23},\ \ \vartheta _{\rm l} =\frac{\rho _{\rm l} }{n_0 S_r}\\&&\vartheta _{\rm g} =\frac{\rho _{\rm g} }{n_0 \left(1-S_r \right)},\ \ d_{\rm l} =\frac{\eta _{\rm l} }{k_{{\rm rl}} \kappa },\ \ d_{\rm g} =\frac{\eta _{\rm g} }{k_{{\rm rg}} \kappa }\\ && k_{{\rm rl}} =\sqrt {S_e } \left\{ {1-[1-\left(S_e \right)^{1/\alpha _2 }]^{\alpha _2 }} \right\}^2\\&&k_{{\rm rg}} =\sqrt {1-S_e } [1-\left(S_e \right)^{1/\alpha _2 }]^{2\alpha _2 } \end{eqnarray*}��¼D
\begin{eqnarray*} &&D_1 =\lambda _c +2\mu ,D_2 =M,D_3 =N,D_4 =b_{11} ,D_5 =b_{12}\\ && D_6 =b_{13}, D_7 =b_{21}, D_8 =b_{22} ,D_9 =b_{23} ,C_1 =\omega ^2\rho\\ &&C_2 =\omega ^2\rho _{\rm l}, C_3 =\omega ^2\rho _{\rm g}, C_4 =\omega ^2\rho _{\rm l}, C_5 =\omega ^2\vartheta _1 -{\rm i}\omega d_{\rm l}\\&&C_6 =0,C_7 =\omega ^2\rho _{\rm g}, C_8 =0,C_9 =\omega ^2\vartheta _{\rm g} -{\rm i}\omega d_{\rm g}\\ && Ba=D_1 D_5 D_9 +D_2 D_6 D_7 +D_3 D_4 D_8 -(D_3 D_5 D_7 +\\ &&\qquad D_1 D_6 D_8 +D_2 D_4 D_9 )\\ && Bb=D_1 D_5 C_9 +D_1 D_9 C_5 +D_5 D_9 C_1 +D_2 D_6 C_7 +\\ &&\qquad D_2 D_7 C_6 + D_6 D_7 C_2 + D_3 D_4 C_8 +D_3 D_8 C_4 +\\ &&\qquad D_4 D_8 C_3 -(D_3 D_5 C_7 + D_3 D_7 C_5 +D_5 D_7 C_3 +\\ &&\qquad D_1 D_6 C_8 +D_1 D_8 C_6 +D_6 D_8 C_1 + D_2 D_4 C_9 +\\ &&\qquad D_2 D_9 C_4 +D_4 D_9 C_2 ) \\ && Bc=D_1 C_5 C_9 +D_5 C_1 C_9 +D_9 C_1 C_5 +D_2 C_6 C_7 +\\ &&\qquad D_6 C_2 C_7 + D_7 C_2 C_6 + D_3 C_4 C_8 +D_4 C_3 C_8 +\\ &&\qquad D_8 C_3 C_4 -(D_3 C_5 C_7 + D_5 C_3 C_7 + D_7 C_3 C_5 +\\ &&\qquad D_1 C_6 C_8 +D_6 C_1 C_8 +D_8 C_1 C_6 + D_2 C_4 C_9 +\\ &&\qquad D_4 C_2 C_9 +D_9 C_2 C_4 ) \\ && Bd=C_1 C_5 C_9 +C_2 C_6 C_7 +C_3 C_4 C_8 -(C_3 C_5 C_7 +\\ &&\qquad C_1 C_6 C_8 + C_2 C_4 C_9 ) \\ && Be=\frac{C_1 C_5 C_9 -C_3 C_5 C_7 -C_2 C_4 C_9 }{\mu C_5 C_9 } \end{eqnarray*}��¼E
\begin{eqnarray*} && Bx1=D1\ast \left(-1\ast k_{{\rm p}1}^2 \right)+C1, Bx2=D2\ast \left(-1\ast k_{{\rm p}1}^2 \right)+C2\\ && Bx3=D3\ast \left(-1\ast k_{{\rm p}1}^2 \right)+C3, Bx4=D4\ast \left(-1\ast k_{{\rm p}1}^2 \right)+C4 \\ && Bx5=D5\ast \left(-1\ast k_{{\rm p}1}^2 \right)+C5, Bx6=D6\ast \left(-1\ast k_{{\rm p}1}^2 \right)+C6 \\ && By1=D1\ast \left(-1\ast k_{{\rm p}2}^2 \right)+C1, By2=D2\ast \left(-1\ast k_{{\rm p}2}^2 \right)+C2 \\ && By3=D3\ast \left(-1\ast k_{{\rm p}2}^2 \right)+C3, By4=D4\ast \left(-1\ast k_{{\rm p}2}^2 \right)+C4 \\ && By5=D5\ast \left(-1\ast k_{{\rm p}2}^2 \right)+C5, By6=D6\ast \left(-1\ast k_{{\rm p}2}^2 \right)+C6 \\ && Bz1=D1\ast \left(-1\ast k_{{\rm p}3}^2 \right)+C1, Bz2=D2\ast \left(-1\ast k_{{\rm p}3}^2 \right)+C2 \\ && Bz3=D3\ast \left(-1\ast k_{{\rm p}3}^2 \right)+C3, Bz4=D4\ast \left(-1\ast k_{{\rm p}3}^2 \right)+C4 \\ && Bz5=D5\ast \left(-1\ast k_{{\rm p}3}^2 \right)+C5, Bz6=D6\ast \left(-1\ast k_{{\rm p}3}^2 \right)+C6 \\ && \mu_{{\rm 1l}} =\frac{Bx3\ast Bx4-Bx1\ast Bx6}{Bx2\ast Bx6-Bx3\ast Bx5}\\&&\mu_{{\rm 2l}} =\frac{By3\ast By4-By1\ast By6}{By2\ast By6-By3\ast By5}\\ && \mu_{{\rm 3l}} =\frac{Bz3\ast Bz4-Bz1\ast Bz6}{Bz2\ast Bz6-Bz3\ast Bz5}\\&&\mu_{{\rm 1g}} =\frac{Bx2\ast Bx4-Bx1\ast Bx5}{Bx3\ast Bx5-Bx2\ast Bx6} \\ && \mu_{{\rm 2g}} =\frac{By2\ast By4-By1\ast By5}{By3\ast By5-By2\ast By6}\\&&\mu_{{\rm 3g}} =\frac{Bz2\ast Bz4-Bz1\ast Bz5}{Bz3\ast Bz5-Bz2\ast Bz6} \\ && \mu_{{\rm sl}} =-\frac{C4}{C5},\mu_{{\rm sg}} =-\frac{C7}{C9} \end{eqnarray*}��¼F
\begin{eqnarray*} && A_{{\rm p}1}^{\rm l} =-(b_{11} +b_{12} \mu_{1{\rm l}} +b_{13}\mu_{1{\rm g}})\\ && A_{{\rm p}2}^{\rm l} =-(b_{11} +b_{12} \mu_{2{\rm l}} +b_{13} \mu_{2{\rm g}}) \\ && A_{{\rm p}3}^{\rm l} =-(b_{11} +b_{12} \mu_{3{\rm l}} +b_{13}\mu_{3{\rm g}})\\ && A_{{\rm p}1}^{\rm g} =-(b_{21} +b_{22} \mu_{1{\rm l}} +b_{23} \mu_{1{\rm g}})\\ && A_{{\rm p}2}^{\rm g} =-(b_{21} +b_{22} \mu_{2{\rm l}} +b_{23}\mu_{2{\rm g}})\\ && A_{{\rm p}3}^{\rm g} =-(b_{21} +b_{22} \mu_{3{\rm l}} +b_{23} {\rm \mu }_{3{\rm g}}) \end{eqnarray*}��¼G
\begin{eqnarray*} && E1=-a\gamma \left(b_{11} +b_{12} \mu_{1{\rm l}} +b_{13} \mu_{1{\rm g}} \right),\\ &&E4=-a\left(1-\gamma \right)\left(b_{21} +b_{22} \mu_{1{\rm l}}+b_{23} \mu_{1{\rm g}} \right) \\ && E2=-a\gamma \left(b_{11} +b_{12} \mu_{2{\rm l}} +b_{13} \mu_{2{\rm g}} \right),\\ &&E5=-a\left(1-\gamma \right)\left(b_{21} +b_{22} \mu_{2{\rm l}}+b_{23} \mu_{2{\rm g}} \right) \\ && E3=-a\gamma \left(b_{11} +b_{12} \mu_{3{\rm l}} +b_{13} \mu_{3{\rm g}} \right),\\ &&E6=-a\left(1-\gamma \right)\left(b_{21} +b_{22} \mu_{3{\rm l}}+b_{23} \mu_{3{\rm g}} \right) \end{eqnarray*}��¼H
\begin{eqnarray*} &&I_{mj} ={\rm i}^{-m}\cdot\\&&\quad \left\{ {{\begin{array}{*{20}l} {{\rm e}^{{\rm i}m\beta _{\rm s} }}, \\ {{\rm e}^{{\rm i}m\beta _{\rm s} }} , \\ {{\rm e}^{{\rm i}m\beta _{{\rm p}1} }}, \\ {{\rm e}^{{\rm i}m\beta _{{\rm p}2} }}, \\ {{\rm e}^{{\rm i}m\beta _{{\rm p}3} }}, \\ \end{array}}} \right.{\begin{array}{*{20}l} {\beta _s =\arcsin \left(k_y /k_{{\rm s}r} \right)}, \\ {\beta _s =\arcsin \left(k_y /k_{{\rm s}r} \right)}, \\ {\beta _{p1} =\arcsin \left(k_y /k_{{\rm p}1r} \right)} , \\ {\beta _{p2} =\arcsin \left(k_y /k_{{\rm p}2r} \right)}, \\ {\beta _{p3} =\arcsin \left(k_y /k_{{\rm p}3r} \right)} , \\ \end{array} }{\begin{array}{*{20}l} {h_j =k_{{\rm s}x} }, \\ {h_j =k_{{\rm s}x} } , \\ {h_j =k_{{\rm p}1x} } , \\ {h_j =k_{{\rm p}2x} }, \\ {h_j =k_{{\rm p}3x} } , \\ \end{array}}{\begin{array}{*{20}l} {j=1} \\ {j=2} \\ {j=3} \\ {j=4} \\ {j=5} \\ \end{array} } \end{eqnarray*}��¼I
\begin{eqnarray*} \left[ {K_{jj'} } \right]=-2\left[ {{\begin{array}{*{20}c} {\hat{{\bar{{\tilde{{\varPsi}}}}}}_1^d } & {\hat{{\bar{{\tilde{{\varPsi}}}}}}_2^d } & {\hat{{\bar{{\tilde{{\varPsi}}}}}}_3^d } & {\hat{{\bar{{\tilde{{\varPsi}}}}}}_4^d } & {\hat{{\bar{{\tilde{{\varPsi}}}}}}_5^d } \\ 0 & 0 & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 3}}^d } & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 4}}^d } & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 5}}^d } \\ 0 & 0 & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 3}}^d } & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 4}}^d } & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 5}}^d } \\ \end{array} }} \right]^{-1}\left[ {{\begin{array}{*{20}c} {\hat{{\bar{{\tilde{{\varPsi}}}}}}_1^u } & {\hat{{\bar{{\tilde{{\varPsi}}}}}}_2^u } & {\hat{{\bar{{\tilde{{\varPsi}}}}}}_3^u } & {\hat{{\bar{{\tilde{{\varPsi}}}}}}_4^u } & {\hat{{\bar{{\tilde{{\varPsi}}}}}}_5^u } \\ 0 & 0 & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 3}}^u } & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 4}}^u } & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm 5}}^u } \\ 0 & 0 & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 3}}^u } & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 4}}^u } & {\hat{{\bar{{\tilde{{\vartheta }}}}}}_{{\rm g 5}}^u } \\ \end{array} }} \right] \end{eqnarray*}�ο����� ԭ��˳��
������ȵ���
������������
�����ڿ�Ӱ������
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 4]
[��������: 1]
[��������: 2]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 3]
[��������: 2]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 2]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 4]
[��������: 4]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 2]
[��������: 2]
[��������: 3]
[��������: 3]
[��������: 1]
[��������: 1]
[��������: 2]
[��������: 1]
[��������: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}