 ,?,2)
,?,2)RESEARCH PROGRESS IN HYDRODYNAMICS OF WIND-WAVE COMBINED POWER GENERATION SYSTEM1)
Zhou Binzhen*, Hu Jianjian*, Xie Bin?, Ding Boyin**, Xia Yingkai?, Zheng Xiaobo?, Lin Zhiliang?, Li Ye,?,2)通讯作者: 2) 李晔,教授,主要研究方向:海上可再生能源. E-mail:ye.li@sjtu.edu.cn.
收稿日期:2019-07-25接受日期:2019-11-5网络出版日期:2019-11-16
| 基金资助: |
Received:2019-07-25Accepted:2019-11-5Online:2019-11-16
作者简介 About authors

摘要
随着化石能源枯竭和全球变暖等环境问题的日益严重,海洋可再生能源(海上风能、波浪能和潮流能)成为研究热点. 为了有效开发海洋可再生能源,降低成本,多种能源综合开发成为现阶段的趋势. 海上风能与波浪能结合具有广阔的应用前景,联合发电系统不断创新. 水动力性能是联合发电系统与波浪相互作用的重要基础. 本文简要介绍多种应用在联合发电系统上的水动力学数值模拟方法,包括线性频域、线性时域、势流非线性方法标识码基于 Navier-Stokes 方程的黏性方法,对现有文献的水动力学数值模拟方法进行综述,从计算效率和精度标识码析其优缺点,且进一步阐述水动力控制优化的技术原理与实验技术主要科研难点,为联合发电系统的水动力设计提供依据. 得到以下主要结论:从计算效率上看,线性频域方法最优,其次为线性时域、势流非线性、黏性方法,从计算精标识码,与前者恰好相反;综合考虑计算效率和精度,采用考虑黏性修正的势流方法来研究是一个切实可行的方案;模标识码方法和优化控制技术目前还不够成熟,尚处于探索阶段.
关键词:
Abstract
With the increasing environmental problems such as depletion of fossil energy and global warming, marine renewable energy (offshore wind energy, tidal energy and wave energy) has become a research hotspot. In order to effectively develop marine renewable energy and reduce costs, comprehensive development of multiple energy sources has become a trend at this stage. The combination of offshore wind energy and wave energy has broad application prospects, and the combined power generation system continues to innovate. Hydrodynamic performance is an important basis for the interaction of combined system with waves. This paper introduces briefly a variety of hydrodynamic numerical simulation methods for combined power generation systems, including linear frequency domain, linear time domain, potential flow nonlinear method, and viscous method based on Navier-Stokes equation. The numerical simulation method is reviewed, and its advantages and disadvantages are analyzed from the aspects of computational efficiency and precision. The technical principle and main research difficulties of hydrodynamic control optimization and experiments are further elaborated, which provides a basis for the hydrodynamic design of the combined power generation system. The main conclusions are as follows. Firstly, from the perspective of computational efficiency, the linear frequency domain method is optimal, followed by linear time domain, potential flow nonlinearity, and viscous method. From the perspective of computational accuracy, it is the opposite of the former. Secondly, considering the computational efficiency and precision, it is a feasible solution to study the potential flow theory considering viscosity correction. Thirdly, at present, model experiment method and optimal control technology are not mature and still in the exploratory stage.
Keywords:
PDF (11972KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
周斌珍, 胡俭俭, 谢彬, 丁波寅, 夏英凯, 郑小波, 林志良, 李晔. 风浪联合发电系统水动力学研究进展1). 力学学报[J], 2019, 51(6): 1641-1649 DOI:10.6052/0459-1879-19-202
Zhou Binzhen, Hu Jianjian, Xie Bin, Ding Boyin, Xia Yingkai, Zheng Xiaobo, Lin Zhiliang, Li Ye.
引 言
海洋可再生能源,主要包括海上风能、波浪能和潮流能,具有远大的开发前景[1]. 图1 $\sim$图3 分别给出了各装置代表图,图1 为西门子 Gemasa 海上风机装置图,图2 为 Power Buoy 波浪能装置图,图3 为 SeaGen 型 1.2MW 潮流能发电装置图. 近二十年来,海洋可再生能源的开发利用受到了全球范围的高度重视. 党的“十九大”报告明确提出要提高海洋资源开发能力,国家《可再生能源中长期发展规划》指出要积极推进海洋能开标识码技术,这不仅有利于发展海洋经济、降低排放并改善环境,而且对管控和建设远离大陆的海岛有重大的战略意义.图1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图1西门子 Gemasa 海上风机[2]
Fig.1Offshore wind turbine of siemens Gemasa[2]
图2
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图2Power Buoy 波浪能装置[3]
Fig.2Power Buoy wave energy device[3]
图3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图3SeaGen 型 1.2MW 潮流能发电装置[4]
Fig.3Sea Gen 1.2MW tidal energy device[4]
波浪能和潮流能与目前比较成熟的海上风能相比,他们的转换和利用技术处于初步发展阶段,但21世纪以来,在节能标识码识的推动下进入了快速发展时期. 尽管发展程度不同,海上风能和波浪能、潮流能所面临的海洋环境是大同小异的.
海洋可再生能源的开发需要有效利用各种自然资源,且降低安装成本,这使得多种能源的综合开发成为势在必行的趋势. 将新 的装置安装在现有的支撑结构和传输基础上,可以有效减少成本. 在和海上风能结合方面,与潮流能相比,波浪能具有一定优势,比如风资源丰富的地点通常波浪资源也丰富. 将波浪能装置与海上风机平台结合具有诸多好处[5-6]:首先,因为二者共享海洋空间,所以可以提高单位海域的能量产出;其次,二者共享系泊系标识码力基础设备和其他组件,因此,可以提高整体的经济效率;第三,海上风电波动性、间歇性、不规则性强、稳定性标识码浪能相对风能更稳定,因此,二者联合发电系统与单独的风电系统相比,可以减少其不工作的小时数;此标识码于波浪能装置吸收了海上风机平台附近的波浪能,改变了局部波浪场,在布置合理的情况下能有效地保护风机免受强浪冲击.
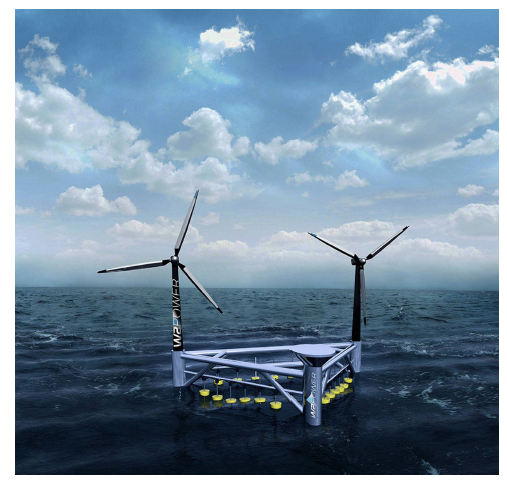
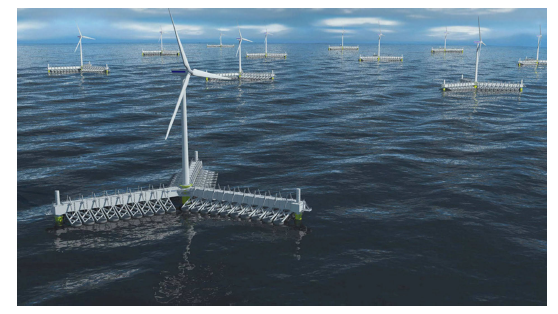
海上风能和波浪能的综合利用尚处于初级阶段. 现有的研究资料主要集中在对风能和波浪能的能源综合利用标识码面[7-8]和传输电网的开发方面[9]. 另外一些文献集中在风波结合装置设计方面 [10],如挪威远洋能源公司开发了一种轻量的三角形半潜浮式平台 W2Power,在平台上方安装两台相对转向的风机,标识码台三边下方悬吊多个点吸式波能装置,总发电功率可达 10MW,其中风机功率7MW,波浪能装置功率 3MW (图4 )[11]; 丹麦波能机构开发的 Wave Star 将波浪能装置安装在呈星形三个方向放射的固定式风机基础上,通过摆臂式浮子的上下运动带动一内置发电机标识码能转换[12] (图5 ). 诸多****开展了海上浮式风机气动性能的理论和模型试标识码[13-15]. 本文主要关注风浪联合发电系统的水动力数值方法、实验方法以及优化控制技术.
将波浪能装置与海上风机平台结合,涉及到多浮体水动力问题的诸多方面,举例来说,在数值模拟方面,主要可分为 线性方法、势流非线性方法和黏性方法[16],线性方法又可分为频域和时域方法. 而实验方法也各不相同. 为更能系统地研究风浪联合发电系统的力学特性,结合现有文献,本文将简要介绍各种数值方法的基本理论、适用范围,从标识码率和计算精度方面对各种数值方法的优缺点进行对比分析,给出综合性的建议,为联合发电系统的水动力设计提供依据. 另一方面,本文简单地阐述了水动力控制优化的技术原理与实验方法面临的主要科研难点,进一步为联合发电系统的水动力设计提供支撑.
图4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图4挪威的W2Power[11]
Fig.4W2Power in Norway[11]
图5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图5丹麦的Wave Star[12]
Fig.5Wave Star in Denmark[12]
1 势流方法
1.1 线性频域方法
势流方法可简单分为势流线性频域方法、线性时域方法和非线性方法. 线性势流方法是目前多浮体水动力学中应用最广泛的方标识码浮体与波浪相互作用的水动力模型广泛采用边界元方法.线性势流理论假设流体无旋、无黏、且不可压缩. 在此假设下,流体力学基本方程大大简化. 在此基础上,线性势流理论通过标识码幅和结构物运动幅值都是小量的情况下,将非线性边界条件进行摄动展开,自由水面和物面边界条件分别在标识码由水面和平均物面上满足. 其中频域方法求解的是周期稳态问题,所求解的物理量与时间无关,因此计算速度很快,适用于风浪联合发电系统的初始优化设计.
单浮体的频域运动方程如下[17]
其中, $\omega $为波浪圆频率,${\pmb M}$ 为浮体质量矩阵,${\pmb a}(\omega )$ 为浮体附加质量矩阵, ${\pmb b} (\omega )$ 为浮体辐射阻尼矩阵,${\pmb B}$, ${\pmb K}$, ${\pmb C}$ 分别为阻尼矩阵、刚度矩阵和恢复力矩阵,${\pmb X} (\omega )$ 为浮体位移,${\pmb F} ( \omega )$ 为浮体所受激振力.
由于线性频域方法较为成熟,目前基于势流线性频域方法研究多浮体运动的方法较多,如大多数水动标识码软件,WAMIT, AQWA 和 HydroSTAR 等.
也有不少科研机构的分析,比如,勾莹[18]采用高阶边界元方法,利用快速多极子技术,分别对频域里线性规则波与多标识码浮体相互作用和弹性浮体相互作用产生的绕射和辐射问题进行了理论研究和数值模拟. Liu 等[19]采用常数边界元法,开发了多浮体水动力线性频域计算方法,并形成了一个开源代码,该频域程序采用了先进标识码函数计算方法和并行计算技巧,因此计算效率和精度高.
同时,线性频域方法也被广泛应用于波浪能装置与平台集成系统的优化设计. 如 De Backer 等[20]对垂荡式波浪能浮子与平台结合的两种布置方案进行了优化设计. Kelly 等[21]提出32个振荡水柱式标识码装置与漂浮式 V 型平台结合,采用频域方法进行数值模拟,并与实验结果进行了对比,由于未考虑非线性以及黏性影标识码值结果与实验结果差别较大,尤其是在平台纵摇共振频率附近. Hyebin 等[22]对垂荡式波浪能浮子与风机平台集成系统的多浮体耦合水动力特性进行了分析,其中波浪能浮子部分标识码黏性修正,研究了不同波浪频率、入射角度情况下浮子对平台的运动影响,以及浮子与平台的遮蔽效应. Zhang 等[23]提出大型模块化浮式平台,由铰链连接的多个平台模块和嵌入式的多个波浪能装置组成,开展了标识码的优化分析,研究表明嵌入式波浪能装置可以减小平台的运动,并得到了最优的刚度和阻尼系数的组合.
1.2 线性时域方法
频域方法只适用于计算周期稳态问题,无法处理瞬变问题,在应用上受到很多限制. 而时域分析方法考虑了时间项的影标识码以对结构物的运动响应进行实时预报,在应用上具有很大的自由度.时域方法分为直接时域和间接时域方法,由于直接时域方法计算量相对较大,目前大部分的多浮体运动响应分析都是通过标识码域方法求得,即对频域下附加质量、辐射阻尼和激振力进行傅氏变换,求得时域下的附加质量、迟滞函数和波浪作用标识码时域内建立多浮体结构运动响应的数值模型,求得结构的时域运动方程得到结构物的运动响应. 该方法计算简便快捷,目前,绝大多数的水动力商业软件中的时域方法都是基于该方法,如 WAMIT, AQWA, HydroSTAR, SEASAM 等软件,并受到广泛 应用.
浮体的时域运动方程通过对式(1)做逆傅里叶变换得到[17]
其中,${\pmb a}(\infty )$ 为无穷频率下的附加质量,${\pmb k}(t)$ 为辐射脉冲响应方程.
以上公式用于将频域计算结果转化为时域结果. 应用这种方法的主要计算量体现在卷积项上,直接计算的话会占用标识码观的计算资源. 由于卷积项是线性的,因此可以用另外的线性定常系统代替,如用转换方程和状态空间系统[24]. 应用状态空间系统替代时,主要在时域上对卷积项和频域上的对应项进行近似. Babarit 等[25]提出一种时域方法,可应用于多个浮体,并和实验结果吻合良好.
利用间接时域方法,O’Cathain[26] 求解牛顿欧拉方程,模拟了铰接驳式的波浪能装置的运动响应. 唐友刚等[27]建立筏式波浪发电装置多浮体水动力模型,利用软件 AQWA 研究多浮体水动力相互作用对发电装置浮体单元水动力系数的影响. 多种不同形式的波浪能装置被提出与海上风机平台结合,实现多能源互补. 如美国 Banister 等在 WindFloat 半潜式平台的基础上,通过加入不同形式的波浪能装置(振荡水柱式[28]、标识码子式[29]和悬挂摆式[30]波能装置),设计出3种新颖的风浪能混合利用系统. Muliawan 等[31]使用 SIMO/TDHMILI3D 线性时域软件,研究了 Spar 式风机平台与垂荡式波浪能浮子组标识码的 STC 装置,在不规则波作用下,波浪能浮子对平台运动和系泊受力的影响. Wan 等[32-33]对此装置在生存海况下(风机和波浪能装置都停止工作)的两种状态进行数值和实验研究,即 Spar 平台标识码在原静水面上一起运动、Spar 平台和浮子下沉一定深度后一起运动,研究表明,对于状态 II,由于非线性较小,线性时域结果标识码结果吻合良好,对于状态I,由于出现波浪抨击等强非线性现象,线性时域结果与实验结果存在差别. Michailides 等[34-35]开发的 SFC 概念,将半潜风机平台和 3 个摆式波能装置结合,文中将线性时域方法标识码结果进行了对比分析. Li 等[36]提出 Spar 风机平台与波浪能、潮流能集成系统,通过研究表明,波浪能和潮流能装置的增加使得风机平台纵荡与标识码向运动减小,同时使总功率提高 45${\%}$.
通常情况下,线性势流理论假设下的边界元方法可以很好地应用到较平静的海况下,与实验结果和黏性方法结果也有较好的吻标识码当海浪较大或极限海况情况下,泄涡等现象发生,线性假设遭到严重破坏,计算结果出现较大偏差. 与线性频域方法相比,标识码性时域方法可以处理瞬态问题,但线性理论始终仅适用于波浪波幅和物体的运动尺度相对于物体的特征尺度或波长较小时,标识码此范围时将不再适用. 此时,需要考虑非线性数值方法.
基于线性势流理论的边界元方法的最大优势是其计算速度. 与黏性方法相比,边界元方法要快出许多倍. 然而当浮体数量增多标识码界元方法所需的计算资源也急剧增加. 因此,当平台上装载的波浪能浮子较多时,计算时间和内存需求会迅速增加,此时需标识码一些快速计算方法,如快速多极子[18]、快速傅里叶变换[37]等方法加速计算.
1.3 势流非线性方法
势流非线性方法的边界条件在瞬时水面和物面上满足,因此,每一时刻都要实时更新自由水面和物面网格,与标识码性方法比,计算量和内存要求大大增加.单浮体的刚体运动方程为[17]
其中,${\pmb F}_{\rm L}(t)$ 为流体作用力,${\pmb F}_{\rm G}$ 为物体的重力,流体的恢复力已包含在 ${\pmb F}_{\rm L}(t)$ 中.
目前基于势流非线性理论研究多浮体运动响应的文献较少. Ma 和 Yan[38]利用准静态有限元法模拟了单色波和标识码与 Spar 平台、单色波与一个和两个 Wigely 船的耦合运动问题. Shivaji 和 Sen[39] 研究了 FPSO 与 Shuttle 浮体间不同连接条件下浮体间的相对运动. Feng 和 Bai [40]采用高阶边界元方法建立了波浪与漂浮双浮体作用的开敞水域全非线性数值模型,解决了多浮体非线性标识码的准确计算和运动方程的解耦问题. Wan等[41]采用非线性势流方法结合黏性修正阻尼力的方法模拟了 STC 装置在生存海况下的出入水问题,与实验结果吻合良好.
大多数关于三维完全非线性数值模型的应用仅限于单浮体,Bai 和 Eatock Taylor[42] 利用高阶边界元方法结合分区技术对规则波与漂浮均匀圆柱和变截面圆柱的相互作用问题进行了标识码究;Zhou 等[43-44]基于高阶边界元法,采用入散射波分离技术,建立了开敞水域波浪与单浮体完全非线标识码的三维数值模型,并模拟了倒圆台、张力腿平台的高频共振问题.
应用势流非线性方法计算多浮体运动问题时,随着网格数量的增加,对计算资源的要求急剧增加. 因此,该方法多用于标识码风大浪等极限海况下海工建筑物的响应和所受载荷. 对于风浪联合发电系统,目前尚未有应用势流非线性方法进行模拟的.
2 黏流方法
浮体在真实海洋环境中运动时,存在黏性摩擦、湍流、边界层分离等黏性效应. 在风浪联合发电系统中,波浪能装标识码其是振荡浮子式波浪能装置,属于小尺度物体,并且通常在共振频率下共振,流体黏性对其运动和功率影响较大,不可忽略. 因此,需要采用考虑黏性的数值理论来研究.从实际角度出发,求解N-S方程有两种方法. 第一种直接数值模拟 (DNS) 精确求解湍流,第二种则通过雷诺时均 (RANS) 标识码模拟 (LES) 等模型近似求解. 对于由风机平台和波浪能装置组成的多浮体系统对计算量要求很高,因此第二种方法更加适合. 基于有限元法和有限体积法成为了主要手段.
与之前提到的势流方法不同,黏性方法充分考虑黏性和气液两相的影响. 这使其成为模拟大风大浪极限海况的有力方法. 另外黏性方法保持了完全非线性. 黏性方法的另一个优势是可以描述气流的运动,在近岸环境下,气流对设备运动的影响通常较大. 黏性方法求解单浮体的刚体运动方程与势流非线性方法相同,参见式 (3).
随着计算机技术的发展,黏性方法已被用于研究波浪与多浮体系统的相互作用,可考虑多浮体共振时的黏性效应. Sauder 等[45]通过 OpenFOAM 软件对底部固定的海上终端与旁靠系泊的LNG运输船间距内部的水体共振现象进行模拟. Yu 和 Li[46] 利用基于 RANS的Star-CCM 软件,研究了一种双体点吸式波浪装置的水动力学特性. McComb 和 Lawson[47]结合边界元法和黏性方法,形成了一种计及黏性效应并可用于任意几何形状的多浮体系统的数值标识码具,并针对一种双体点吸式波浪能装置进行了研究. Ren 等[48]利用 $k$-$\varepsilon $ 湍流模型对风浪同时作用下 TLP 5MW 风机平台在工作工况和极端海况下进行了数值模拟,并与实验结果吻合较好. Shi 等[49]通过 Flow-3D 软件对垂荡式圆锥底波浪能装置的水动力性能进行优化设计,并与实验结果吻合良好. Zhang 等[50]通过Star-CCM+软件对兼作振荡浮子式波浪能发电装置的浮式防波堤的防波性能和发电性能进行了研究.
目前黏性方法的最大劣势在于对计算要求太高,尤其是对于风浪联合发电系统,当波浪能装置个数增加时,网格数量增标识码算效率急剧降低. 因此,通常应用黏性方法分析极限海况下(大风大浪)风浪联合发电系统的生存能力.
3 实验与优化控制
波浪能实验技术目前比较成熟,主要在波浪水池中完成,如 Chen 等[51]开展双共振点吸式波浪能装置的水动力实验; Xu 等[52]开展了双浮体点吸式波浪能装置在正常工况和极端海况下的水动力实验. 物理模型均根据傅汝德数相似选取缩尺比.海上风机实验主要在风浪流等多功能水池进行. 由于同时涉及到海上结构物的水动力和风机的气动标识码,使得物理模型实验面临诸多挑战[53]. 近年来,针对海上风机,开展了一系列实验,但仍存在很多不足,始终处在探索阶段. Nielsen 等[54]基于 1:47 缩尺比,在 Marintek对5MW Spar 式漂浮式风机进行了水池模型试验. Cermelli 等[55] 在 WindFloat 平台的第一阶段进行了 1:67 缩尺比的模型试验. 由于傅汝德数缩尺比下雷诺数不匹配的影响,导致模型叶轮轴向推力值比目标值小,于是用圆盘来代替叶片以得到足够的叶轮推力. 这种方法只考虑了叶轮轴向推力,忽略了风机其他空气载荷的试验策略,为不匹配低雷诺数下的浮式风机水池模型试验提供了标识码决的参考方法. Shin[56]在 Ocean Engineering Wide Tank 开展了 OC3-Hywind 浮式风机的 1:128 模型试验,并且使用了模型叶片,取代了前人使用的推力圆盘. 近来,University of Maine 开展了一系列基于 1:50 缩尺比的浮式风机水池模型试验,包括 Spar 型、半潜型和 TLP 型[57-59]. Huijs 等[60]在荷兰MARIN水池开展了 GustoMSC Tri-Floating concept 浮式风机 1:50 的模型试验,提出了在傅汝德缩尺的模型风速下具有更好的$C_{\rm t}$ 和 $C_{\rm p}$ 空气动力性能的新模型叶片,且该试验中应用了控制并进行了相关阐述.
风浪联合发电装置实验与海上风机实验相同,主要在风浪流等多功能水池进行. 由于和海上风机模型实验面临的挑战相似,目前对风浪联合系统开展的模型试验相对较少. 挪威科技大学提出了 STC (spar tours combination)[33]、SFC (semisubmersible wind energy and flap-type wave energy converter)[34-35] 风浪联合发电系统的概念,并在MARINTEC的拖曳水池中开展了缩尺比的模型试验,其标识码采用轴向推力相似的原则进行设计. 与海上风机模型实验相同,风浪联合发电系统中的风机模型需要根据雷诺数相似进行重新设计,或者采用其他新型的实标识码解决傅汝德数和雷诺数不匹配的问题.
联合发电系统的优化与控制对提高波浪能装置浮体水动力的能量转化效率起着决定性的作用,特别是在不规则变化的风标识码中. 同时,浮体对波浪能的有效吸收及拦截将大大减少周边海上风机的水动力载荷. 浮体控制的基本工作原理如下. 发电系统中的波浪能动力输出装置在转化波浪能为电能的同时,对与其耦合的浮体施加了一个作用力(控制力),以协调浮体的动态响应. 为了使浮体更有效地吸收入射波中携带的能量,浮体应在控制力的协调下产生特定理想运动,以拦截入射波的传播. 据 Falnes[61] 基于线性势流理论的推导,浮体的特定理想运动需满足两个基本条件以达到能量吸收最大化:(1) 浮体的速度需与入射标识码体施加的压力成相同的振荡相位,这意味着浮体与入射波形成共振;(2) 浮体振荡产生的顺流辐射波与入射波所抵消.
在实时变化的风浪环境下,以上最优能量吸收控制理论在实际控制系统中的实现面临着以下科研挑战:(1) 为使浮体与频率实时改变的入射波形成共振,波能动力输出装置需实现“反应式控制”,从而兼具发电机与驱动标识码能,这将大大提高装置的制造难度及成本[61];(2) 出于不规则波的随机变化特性,入射波对浮体的施力情况需要进行预测[62]. 其预测结果的精度对控制效果有着直接影响[63];(3) 此控制理论基于线性水动力模型,对高海况下的非线性模型并不适用[62];(4) 浮体需要在至少两个自由度下振动(垂荡+纵荡或纵摇),才能更有效地吸收入射波能[64]. 在多浮体情况下(常见于风浪联合发电系统阵列),所需控制的自由度成倍数增长且相互耦合,标识码大增加控制系统的复杂性及造价[61].
基于以上诸多技术难点,现阶段更具应用潜力的科研方向为更实现为简单有效的次优控制[65]. 以 控制方式为例,“被动控制”系统比“反应式控制”受到业绩****更为广泛的关注[62]. “被动控制”系统又可分为“相位控制”与“被动载荷”. “相位控制”旨在强制浮体系统与入射波形成共振,通常由机械制动系统实现,其在理想状态下能标识码效率接近“反应式控制”的效率. 然而“相位控制”的非线性特征及控制鲁棒性需要进行更深入的研究认证,以实现更高的应用价值[66]. 另一方面,“被动载荷”只考虑发电装置与水动力阻抗的实时匹配,在机理上简单可靠容易实现. 然后,“被动载荷”的发电效率与对浮体的可控性远低于“反应式控制”与“相位控制”,这很大程度地限制了其应用价值[62].
4 讨 论
4.1 水动力数值方法对比分析
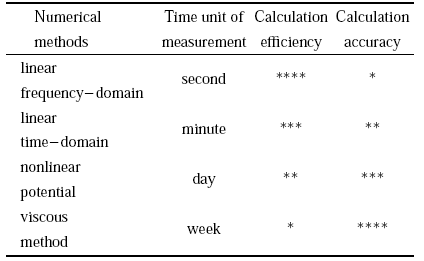
通过以上各种数值方法的对比分析,可以看出,针对不同的问题,应结合计算效率和计算精度,选用不同的数值计算方法. 表1中给出了4种不同数值计算方法在计算效率和计算精度上的对比,等级越高(星号越多),表示计算效率越高、计算精度越高. 从计算时间上来说,线性频域方法计算效率最高,但只适用于稳态问题;其次是线性时域方法,适用于瞬态问题标识码算同样的稳态问题,计算精度与频域方法相同,若计算瞬态问题,计算精度更高;势流非线性方法由于每一时刻需标识码时面上重新建立矩阵方程并求解,因此,计算效率远低于前两者,但由于考虑到物面和自由水面的非线性,对于非线标识码(极端海况)的问题,计算精度更高;黏性方法同时考虑了非线性和黏性的影响,因此计算效率最低,但计算精度最高.Table 1
表1
表1不同水动力数值方法对比表
Table 1
 |
新窗口打开|下载CSV
需要根据问题不同来选择不同的数值模型. 若考虑正常工况下,风浪联合系统的优化设计问题,可采用线性频域方法. 标识码非稳态情况下的优化设计问题,需要采用线性时域方法,如非定常风、瞬态波等情况. 对于线性频域和时域方法,当浮体个数较多时,需考虑采用加速算法. 当波浪波幅和物体的运动尺度响度与物体的特征尺度或波长相比较非小量时,线性理论不再适用,需要采用势流非线性方标识码计算,如大风大浪等极限海况.
势流理论忽略了流体的黏性,当流体黏性较重要,如求解小尺度物体(振荡浮子式波浪能装置)时,需要采用黏性方法进行计算. 虽然黏性方法计算精度高,但由于其计算效率很低,尤其对于风浪联合系统这类网格数量很多的问题,只有当计算极端海标识码体黏性特别重要的算例时,才采用黏性方法直接计算. 综合考虑计算效率和计算精度,采用考虑黏性修正的势流理论来研究是一个切实可行的方案,其中黏性修正需要通过黏性标识码者实验结果得 到[67].
4.2 优化控制的可能性及挑战
优化控制技术对提高联合发电系统的水动力性能尤为关键. 最优能量吸收理论的实现面临着诸多技术难点,不论是对控标识码或是对控制算法的要求. 因此优化控制方法受到业界****更为广泛的关注. 控制是一个极为复杂的研究课题,在本文中不做详述,旨在让读者了解控制方法对联合发电系统水动力设计优化的支撑作用.4.3 实验方法探索
物理模型实验是验证数值模型准确性和检验装置可靠性的重要手段. 但风浪联合发电系统由于同时涉及到结构物的水动标识码风机的气动力,使得物理模型实验面临诸多挑战. 模型实验的相似比选取对结果的影响较大,海洋平台和波浪能装置采用傅汝德数相似选取模型缩尺比,风机需要根据雷标识码似来选取风机尺寸,但实验中很难满足. 由于傅汝德数缩尺下雷诺数不匹配的影响,模型试验不能很好的反映真实海况中联合发电系统的特性,目前这方面的实标识码还不成熟,仍处在探索阶段,需要进一步寻找新型的实验方法解决上述问题.参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
DOIURLPMID [本文引用: 1]

Like many estuaries in the world, salinity levels in the Delaware River and Estuary are expected to increase due to a deepened navigational channel and sea-level rise. This study estimated operational cost increases resulting from increased ambient salinity likely to be incurred at PSEG-Hope Creek, an evaporatively cooled electricity generating station. To estimate cost increases, a linked physical-economic model was developed to generate daily forecasts of salinity and the resulting changes in facility's cooling water treatment and pumping requirements. Salinity increases under potential future bathymetric configurations were simulated using a hydrodynamic model. On an equivalent annual basis (discounted at 5%), average cost increases were $0.4M per year, or approximately 0.1% of estimated total annual operating costs for the facility. Methods developed here could be employed at other facilities anticipating future salinity increases. Results inform cost-benefit analyses for dredging projects and contribute to estimates of the indirect costs to society from carbon emissions through sea-level rise. Future research refinements can focus on modeling changes in suspended sediment concentrations and estimating their impacts on operational costs.
[本文引用: 2]
[本文引用: 2]
[本文引用: 2]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
The island of Tenerife, a UNESCO Biosphere Reserve in the Atlantic Ocean, aims to be energy self-sufficient in order to reduce its carbon footprint. To accomplish this goal it should develop the renewable sources, in particular wave and offshore wind energy. The objectives of this work are twofold; (i) to characterize the wave and offshore wind power distribution around the island and (ii) to determine which offshore area is best suited for their exploitation, taking into account the resource and other conditioning factors such as the bathymetry, distance to the coastline and ports, and offshore zoning. To carry out this research, hindcast wave and wind data obtained with numerical models are used alongside observations from meteorological stations. One area, in the vicinity of Puerto de la Cruz, is identified as having great potential for installing a hybrid floating wave-wind farm. Both resources are characterized for the area selected: the wave resource in terms of wave directions, significant wave heights and energy periods; the offshore wind resource in terms of directions and speeds in addition to the seasonality for the both resources. It is found that most of the wave resource is provided by N and NNW waves with significant wave heights between 1.5 m and 3.0 m and energy periods between 10 s and 14 s. It follows that the Wave Energy Converters deployed in the area should have maximum efficiency in those ranges. As for the offshore wind resource, most of the energy corresponds to NNE and NE winds with speeds between 9 and 14 m s(-1), which should be taken into account when selecting the offshore wind turbines. (C) 2013 Elsevier Ltd.
DOIURLPMID [本文引用: 1]
The installation of offshore wind farms in the German Exclusive Economic Zone requires the deployment of sonar transponders to prevent collisions with submarines. The general requirements for these systems have been previously worked out by the Research Department for Underwater Acoustics and Marine Geophysics of the Bundeswehr. In this article, the major results of the research project "Investigation of Sonar Transponders for Offshore Wind Farms" are presented. For theoretical investigations a hybrid approach was implemented using the boundary element method to calculate the source directivity and a three-dimensional ray-tracing algorithm to estimate the transmission loss. The angle-dependence of the sound field as well as the weather-dependence of the transmission loss are compared to experimental results gathered at the offshore wind farm alpha ventus, located 45?km north of the island Borkum. While theoretical and experimental results are in general agreement, the implemented model slightly underestimates scattering at the rough sea surface. It is found that the source level of 200?dB re 1?μPa at 1?m is adequate to satisfy the detectability of the warning sequence at distances up to 2 NM (≈3.7?km) within a horizontal sector of ±60° if realistic assumptions about signal-processing and noise are made. An arrangement to enlarge the angular coverage is discussed.
DOIURL [本文引用: 1]
Abstract
The electric power generation of co-located offshore wind turbines and wave energy converters along the California coast is investigated. Meteorological wind and wave data from the National Buoy Data Center were used to estimate the hourly power output from offshore wind turbines and wave energy converters at the sites of the buoys. The data set from 12 buoys consists of over 1,000,000 h of simultaneous hourly mean wind and wave measurements. At the buoys, offshore wind farms would have capacity factors ranging from 30% to 50%, and wave farms would have capacity factors ranging from 22% to 29%. An analysis of the power output indicates that co-located offshore wind and wave energy farms generate less variable power output than a wind or wave farm operating alone. The reduction in variability results from the low temporal correlation of the resources and occurs on all time scales. Aggregate power from a co-located wind and wave farm achieves reductions in variability equivalent to aggregating power from two offshore wind farms approximately 500km apart or two wave farms approximately 800km apart. Combined wind and wave farms in California would have less than 100 h of no power output per year, compared to over 1000 h for offshore wind or over 200 h for wave farms alone. Ten offshore farms of wind, wave, or both modeled in the California power system would have capacity factors during the summer ranging from 21% (all wave) to 36% (all wind) with combined wind and wave farms between 21% and 36%. The capacity credits for these farms range from 16% to 24% with some combined wind and wave farms achieving capacity credits equal to or greater than a 100% wind farm because of their reduction in power output variability.DOIURLPMID [本文引用: 1]
To overcome the delignification saturation point in traditional alkaline hydrogen peroxide pretreatment (AHP), a powerful modified AHP delignification methodology was established by introducing ethanol into the system. The pretreatment caused significant lignin removal of bamboo at elevated pretreatment temperature with the highest lignin removal reaching 80.0% at 100?°C, higher than that (74.9% lignin removal) in pretreatment without the ethanol assistance. In addition, a certain amount of carbohydrates was also solubilized during the process whose recovery was 83.3% (glucan) and 67.6% (hemicellulose), respectively. The pretreated solid exhibited excellent enzymatic digestibility, with hydrolysis yields of ~100% and 95.7% for glucan and xylan, respectively. Our studies further indicate that this delignification methodology is versatile for hardwood and herbaceous plants, but does not perform well on softwood.
DOIURLPMID [本文引用: 3]
Assessing larval dispersal is essential to understand the structure and dynamics of marine populations. However, knowledge about early-life dispersal is sparse, and so is our understanding of the spawning process, perhaps the most obscure component of biphasic life cycles. Indeed, poorly known species-specific spawning modality and species-specific early-life traits, as well as the high spatio-temporal variability of the oceanic circulation experienced during larval drift, hamper our ability to appraise the realized connectivity of coastal fishes. Here, we propose an analytical framework which combines Lagrangian modelling, network theory, otolith analyses and biogeographical information to pinpoint and characterize larval sources which are then grouped into discrete spawning areas. Such well-delineated larval sources allow improving the quantitative evaluations of both dispersal scales and connectivity patterns. To illustrate its added value, our approach is applied to two case-studies focusing on Diplodus sargus and Diplodus vulgaris in the Adriatic sea. We evidence robust correlations between otolith geochemistry and modelled spawning areas to assess their relative importance for the larval replenishment of the Apulian coast. Our results show that, contrary to D. sargus, D. vulgaris larvae originate from both eastern and western Adriatic shorelines. Our findings also suggest that dispersal distances and dispersal surfaces scale differently with the pelagic larval duration. Furthermore, 30.8% of D. sargus larvae and 23.6% of D. vulgaris larvae of the Apulian populations originate from Marine protected area (MPA), exemplifying larval export from MPAs to surrounding unprotected areas. This flexible multidisciplinary framework, which can be adjusted to any coastal fish and oceanic system, exploits the explanatory power of a dispersal model, fine-tuned and backed-up by observations, to provide more reliable scientific basis for the management and conservation of marine ecosystems.
[本文引用: 3]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 3]
[本文引用: 3]
[博士论文].
[本文引用: 2]
[PhD Thesis].
[本文引用: 2]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
Combining offshore wind and wave energy converting apparatuses presents a number of potentially advantageous synergies. To facilitate the development of a proposed floating platform combining these two technologies, proof of concept scale model testing on the wave energy converting component of this platform has been conducted. The wave energy component is based on the well-established concept of the oscillating water column. A numerical model of this component has been developed in the frequency domain, and the work presented here concerns the results of this modelling and testing. The results of both are compared to assess the validity and usefulness of the numerical model.
[本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
Abstract
Time-domain models of marine structures based on frequency domain data are usually built upon the Cummins equation. This type of model is a vector integro-differential equation which involves convolution terms. These convolution terms are not convenient for analysis and design of motion control systems. In addition, these models are not efficient with respect to simulation time, and ease of implementation in standard simulation packages. For these reasons, different methods have been proposed in the literature as approximate alternative representations of the convolutions. Because the convolution is a linear operation, different approaches can be followed to obtain an approximately equivalent linear system in the form of either transfer function or state-space models. This process involves the use of system identification, and several options are available depending on how the identification problem is posed. This raises the question whether one method is better than the others. This paper therefore has three objectives. The first objective is to revisit some of the methods for replacing the convolutions, which have been reported in different areas of analysis of marine systems: hydrodynamics, wave energy conversion, and motion control systems. The second objective is to compare the different methods in terms of complexity and performance. For this purpose, a model for the response in the vertical plane of a modern containership is considered. The third objective is to describe the implementation of the resulting model in the standard simulation environment Matlab/Simulink.//
[本文引用: 1]
DOIURL [本文引用: 1]
Abstract
Time-domain modelling of wave-energy devices is an important step in the design and evaluation of potential devices and to provide a basis for model-based control design. This is due to the need for information on the device's transient response characteristics; even when linear potential theory is assumed when modelling hydrodynamic loads, significant non-linearities may be present in the system due to the power-take-off (PTO), mooring, and control subsystems. In this paper, an approach for modelling multi-body marine systems is presented. Newton–Euler equations with eliminated constraints (NE-EC) are utilised to capture the rigid-body dynamics of the constrained multi-body system. This results in the convenient integration of active loads (as opposed to inter-body constraint forces) acting on the multi-body system and provides a form suitable for control design. This paper considers active loads originating from hydrodynamic, PTO, and mooring components. The model developed is validated on a two-body system and is shown to have good agreement across the range of important operational frequencies.[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
//
[本文引用: 1]
//
[本文引用: 1]
DOIURL [本文引用: 1]
Wind turbines need to be spaced at a distance of the order of 1 km apart to reduce the effect of aerodynamic wakes. To increase the density of the power production in the farm, the deployment of wave energy converters (WECs) in the spaces between FWTs could be considered. However, the cost of energy from WECs is still very large. Therefore, the deployments of the WECs will reduce the economic value of the total project. In the present paper, a combined concept involving a combination of Spar-type FWTs and an axi-symmetric two-body WECs is considered. Compared with segregated deployments of FWTs and WECs, this combined concept would imply reduced capital costs of the total project because it will reduce the number of power cables, mooring line and the structural mass of the WECs. However, the effect of the addition of a Torus (donut-shape heaving buoy) on the FWTs motions as well as the power production should first be investigated. In the present study, coupled (wave- and wind-induced response-mooring) analysis is performed using SIMO/TDHMILL3D in the time domain to study the motion behaviour of the combined concept and to estimate the power production from both FWT and WEC under operational conditions. Mooring tension in the combined concept is also compared with the mooring tension in the Spar-type FWT alone. Hydrodynamic loads are determined using Hydrol). The validated simplified method called TDHMILL is implemented to calculate the aerodynamic forces as a function of the relative wind velocity. The analysis is performed for several operational conditions according to metocean data taken in the Statfjord field in the North Sea. Finally, the behaviour of the combined concept under operational conditions is assessed, and it is shown to result in a positive synergy between wind and wave energy generation in terms of both capital investment and power production. (C) 2012 Elsevier Ltd.
DOIURL [本文引用: 1]
DOIURL [本文引用: 2]
DOIURL [本文引用: 2]
DOIURL [本文引用: 2]
[本文引用: 1]
[博士论文].
[本文引用: 1]
[PhD Thesis].
[本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURLPMID [本文引用: 1]
The resonance of a floating tension leg platform (TLP) excited by the third-harmonic force of a regular wave is investigated based on fully nonlinear theory with a higher order boundary element method (BEM). The total wave elevation and the total velocity potential are separated into two parts, based on the incoming wave from infinity and the disturbed potential by the body. A numerical radiation condition is then applied at the far field to absorb the disturbed potential without affecting the incident potential. The BEM mesh on the free surface is generated only once at the initial time and the element nodes are rearranged subsequently without changing their connectivity by using a spring analysis method. Through some auxiliary functions, the mutual dependence of fluid/structure motions is decoupled, which allows the body acceleration to be obtained without the knowledge of the pressure distribution. Numerical simulation is carried out for the interaction of a floating TLP with waves. The focus is on the motion principally excited by higher harmonic wave forces. In particular, the resonance of the ISSC TLP generated by the third-order force at the triple wave frequency in regular waves is investigated, together with the tensions of the tendons.
//
[本文引用: 1]
DOIURLPMID [本文引用: 1]
Active development of quantum informational components such as quantum computers and quantum key distribution systems requires parameter characterization of single photon detectors. A key property of the single photon detectors is detection efficiency. One of the methods of the detection efficiency measurement, as listed in the international standard ETSI, is the reference-free twin-photon-based Klyshko method. The signal-to-noise ratio (SNR) of this method depends on the combination of the pump wavelength, the nonlinear crystal's axis angle, and the type of detector's sensitive element. When the combination is difficult, one has to deal with the low SNR of the detector counts measurement. To gain the high SNR, one has to average the long record complicated with the "random telegraph signal" noise. This type of noise exhibits high spectral density at a zero frequency, where simple averaging works. The heterodyne based method we have proposed is to perform averaging at the higher frequency of the modulation introduced to the standard Klyshko measurement scheme. The method was numerically simulated and experimentally tested. The 14 times improvement in SNR for the proposed method relative to the simple averaging was demonstrated by the numerical simulation and confirmed experimentally.
//
[本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOIURLPMID [本文引用: 1]
The present study explored phytochemicals, porcine pancreatic α-amylase (PPA) and lipase (PPL) inhibitory activities and antioxidant potential of polar and nonpolar extracts of the leaves and flowers of Ocimum basilicum and the in-silico mode of interaction between these enzymes and the major chemical constituents of the herb. The hexane extract (HE) and hydro-ethanolic extract (EE) obtained sequentially were used to estimate PPA and PPL inhibitory and antioxidant activities, total phenolic content (TPC) and total flavonoid content (TFC). Chemical constituents of the essential oils and HE were determined by GC-MS (Gas Chromatography-Mass Spectrometry). For PPA inhibition, IC50 (μg/mL) of the extracts were 0.27-0.37, which were close to 0.24 of acarbose, while for PPL inhibition, IC50 (μg/mL) of the extracts were 278.40-399.65, and that of Orlistat 145.72. The flowers EE was most potent antioxidant followed by leaves EE. The leaves EE had highest TPC and TFC followed of flowers EE. The essential oil of flowers had higher estragole (55%) than linalool (37%), while the essential oil of the leaves had higher linalool (42%) than estragole (38%). The HE of the flowers contained higher estragole (42%) than linalool (23%), while of the HE of the leaves too had higher estragole (65%) than linalool (18%). The in-silico molecular docking study showed linalool and estragole to have considerable PPA and PPL binding potential, which were further investigated through molecular dynamics simulations and binding free energy calculations. The PPA and PPL inhibitory activities of O. basilicum extracts and their notable antioxidant potential propose the herb as a multi-target complimentary medicine for diabetes, obesity and oxidative stress.
[本文引用: 1]
//
DOIURLPMID [本文引用: 1]
A free-vortex wake (FVW) model is developed in this paper to analyse the unsteady aerodynamic performance of offshore floating wind turbines. A time-marching algorithm of third-order accuracy is applied in the FVW model. Owing to the complex floating platform motions, the blade inflow conditions and the positions of initial points of vortex filaments, which are different from the fixed wind turbine, are modified in the implemented model. A three-dimensional rotational effect model and a dynamic stall model are coupled into the FVW model to improve the aerodynamic performance prediction in the unsteady conditions. The effects of floating platform motions in the simulation model are validated by comparison between calculation and experiment for a small-scale rigid test wind turbine coupled with a floating tension leg platform (TLP). The dynamic inflow effect carried by the FVW method itself is confirmed and the results agree well with the experimental data of a pitching transient on another test turbine. Also, the flapping moment at the blade root in yaw on the same test turbine is calculated and compares well with the experimental data. Then, the aerodynamic performance is simulated in a yawed condition of steady wind and in an unyawed condition of turbulent wind, respectively, for a large-scale wind turbine coupled with the floating TLP motions, demonstrating obvious differences in rotor performance and blade loading from the fixed wind turbine. The non-dimensional magnitudes of loading changes due to the floating platform motions decrease from the blade root to the blade tip.
//
DOIURLPMID [本文引用: 1]
The current key challenge in the floating offshore wind turbine industry and research is on designing economic floating systems that can compete with fixed-bottom offshore turbines in terms of levelized cost of energy. The preliminary platform design, as well as early experimental design assessments, are critical elements in the overall design process. In this contribution, a brief review of current floating offshore wind turbine platform pre-design and scaled testing methodologies is provided, with a focus on their ability to accommodate the coupled dynamic behaviour of floating offshore wind systems. The exemplary design and testing methodology for a monolithic concrete spar platform as performed within the European KIC AFOSP project is presented. Results from the experimental tests compared to numerical simulations are presented and analysed and show very good agreement for relevant basic dynamic platform properties. Extreme and fatigue loads and cost analysis of the AFOSP system confirm the viability of the presented design process. In summary, the exemplary application of the reduced design and testing methodology for AFOSP confirms that it represents a viable procedure during pre-design of floating offshore wind turbine platforms.
//
//
[本文引用: 1]
//
[本文引用: 1]
[本文引用: 3]
DOIURL [本文引用: 4]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
DOIURL [本文引用: 1]
This paper concerns the design of feedback control systems to maximize power generation of a wave energy converter (WEC) in a random sea. In the literature on WEC control, most of the proposed feedback controllers fall into three categories. Many are static; i.e., they extract power by imposing an equivalent damping or resistive load on the power take-off (PTO) devices. Others are dynamic and are designed to maximize power generation at all frequencies, which results in an anticausal feedback law. Other dynamic control design methods are causal, and are tuned to achieve the anticausal performance at only a single frequency. By contrast, this paper illustrates that the determination of the true optimal causal dynamic controller for a WEC can be found as the solution to a nonstandard linear quadratic Gaussian (LQG) optimal control problem. The theory assumes that the control system must make power generation decisions based only on present and past measurements of the generator voltages and/or velocities. It is shown that unlike optimal anticausal control, optimal causal control requires knowledge of the stationary spectral characteristics of the random sea state. Additionally, it is shown that the efficiency of the generator factors into the feedback synthesis. The theory is illustrated on a linear dynamical model for a buoy-type WEC with significant resonant modes in surge and pitch, and equipped with three spatially-distributed generators. (C) 2013 Elsevier Ltd.
DOIURL [本文引用: 1]
Abstract
This paper describes two methods which can be used to assess the benefit that latching control can bring to the efficiency of wave energy converters. The first method is based on the analytical solution of the equation of motion of the Wave Energy Converter (WEC) in the time domain, using matrix exponentials; it can be used to compute the optimal latching delay. The second one derives from optimal command theory; it is based on a hamiltonian formulation and Pontryagin’s maximum principle. A weak modelling is used to describe latching control prior to applying the optimal command theory. These methods are applied to two different WECs. The first one is a generic one degree of freedom wave energy converter, an heaving buoy, and the second one is the four degrees of freedom wave energy converter called SEAREV. It is shown that latching control based on optimal command theory applied to this weak formulation is not fully optimal in regular waves. However, it can be used to generate optimally controlled time domain sequences of the WECmotions in a random sea, and so it provides an answer to the question: what is the maximum benefit latching control could bring to my wave energy device in a random sea?DOIURL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}