RESEARCH ON DYNAMICS OF A RIGID-FLEXIBLE-THERMAL COUPLING ROTATING HUB-FGM BEAM 1)
Fan Jihua,*,2), Chen Liwei*, Wang Mingqiang*, Zhang Dingguo?, Du Chaofan*** School of Mechanical Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, Jiangsu, China † School of Sciences, Nanjing University of Science and Technology, Nanjing 210094, China ** College of Civil Science and Engineering, Yangzhou University, Yangzhou 225127, Jiangsu, China
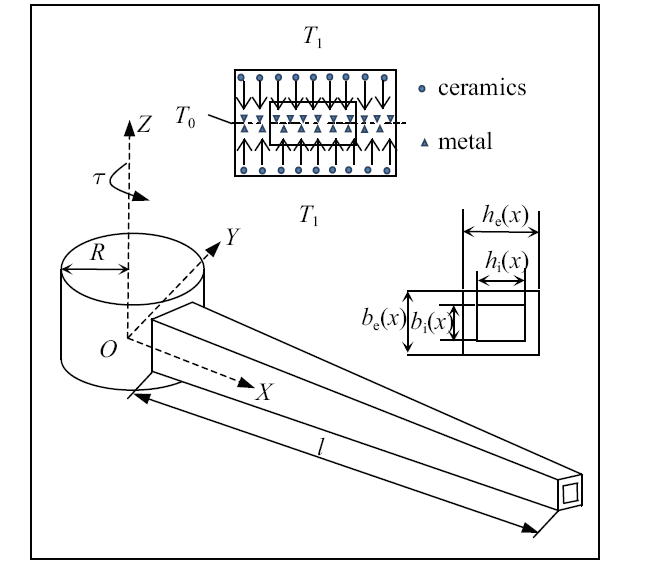
Abstract The rigid-flexible-thermal coupling dynamics of the hub-FGM beam system under large overall rotating motion is studied. The FGM beam is an Euler-Bernoulli beam, and its physical properties follow certain kinds of power law gradient distribution and vary in the thickness direction. The longitudinal deformation and the transverse deformation of the flexible beam are considered and the coupling term of the deformation which is caused by transverse deformation of the flexible beam is included in the expression of longitudinal deformation. Considering the influence of the thermal coupling of the tapered hollow beam which is under the condition of external high temperature and internal cooling passage cooling on the dynamic characteristics of the system, the temperature field distributed along the thickness direction of the FGM beam is obtained, and the thermal strain is included in the constitutive relationship of the beam. By using the assumed mode method to describe the deformation of the beam, the rigid-flexible-thermal coupling dynamic equations of the system are derived via employing Lagrange's equations of the second kind, as well as to compile the dynamics simulation software. Then the dynamics of the system are studied through simulation examples. The results show that the dynamic response of beams with different sections is quite different, so it is necessary to model the actual system reasonably. When the large overall rotating motion is known, the FGM beam considering the thermal shock load will effectively suppress the transverse bending deformation, and the high-frequency oscillation will occur with the superposition of the thermal shock when the large overall rotating motion is constant; When the large overall rotating motion is unknown, the external torque and the thermal shock load interact to produce a thermal coupling effect, which causes the system to exhibit high-frequency oscillation, at the same time , the rigid-flexible thermal coupling effect of the hub-FGM beam system is appeared. Keywords:functionally graded material;tapered hollow beam;rigid-flexible-thermal coupling;dynamic simulation
PDF (639KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 范纪华, 陈立威, 王明强, 章定国, 杜超凡. 旋转中心刚体-FGM梁刚柔热耦合动力学特性研究 1). 力学学报[J], 2019, 51(6): 1905-1917 DOI:10.6052/0459-1879-19-241 Fan Jihua, Chen Liwei, Wang Mingqiang, Zhang Dingguo, Du Chaofan. RESEARCH ON DYNAMICS OF A RIGID-FLEXIBLE-THERMAL COUPLING ROTATING HUB-FGM BEAM 1). Chinese Journal of Theoretical and Applied Mechanics[J], 2019, 51(6): 1905-1917 DOI:10.6052/0459-1879-19-241
( JiaGuangseng, ZhangLi, LuCongming, et al. Film cooling performance with internal coolant channel crossflow Journal of Aerospace Power, 2015,30(4):823-830 (in Chinese)) [本文引用: 1]
( LiGuangchao, MoWeishu, ZhangWei, et al. Experimental investigation on integrated colling performance of nozzle guide vane Journal of Propulsion Technology, 2018,39(12):2772-2778 (in Chinese))
( ShiXiaojun, ShuiLinqi, GaoJianmin, et al. Internal cooling passage of mist/steam two-phase flow enhanced cooling gas turbine blade Journal of Aerospace Power, 2015,30(11):2561-2567 (in Chinese))
ChowdhuryNHK, QureshiSA, ZhangM, et al. Influence of turbine blade leading edge shape on film cooling with cylindrical holes International Journal of Heat and Mass Transfer, 2017,115:895-908 DOIURL
FanX, LiL, ZouJ, et al. Local heat transfer of vortex cooling with multiple tangential nozzles in a gas turbine blade leading edge cooling passage International Journal of Heat and Mass Transfer, 2018,126:377-389 DOIURL
( LiYanlin, RaoYu, WangDeqiang, Numerical study on turbulent heat transfer of miniature ribs in turbine blade internal passage Journal of Aerospace Power, 2018,39(10):161-169 (in Chinese))
( QiuQinggang, ShenShengqiang, Effect of Helix-Alike fin surface shape on flow and heat transfer in the internal cooling passage Journal of Aerospace Power, 2006,21(1):71-76 (in Chinese))
( QiuQinggang, WangHaipeng, ZhaoLiang, et al. Heat transfer and friction behavior in internal cooling duct with cuniform-fins Journal of Aerospace Power, 2011,26(12):2648-2654 (in Chinese))
( ZhuXingdan, ZhangJinZhou, TanXiaoming. Effects of rotation on shaped-hole film cooling on a turbine blade Journal of Propulsion Technology, 2016,37(9):1713-1719 (in Chinese))
( HanFeng, LiHaiwang, MaYiwen, et al. Effect of rotation on the leading-sdge region film cooling of a twisted turbine blade Journal of Aerospace Power, 2019,34(6):1352-1363 (in Chinese)) [本文引用: 1]
KaneTR, RyanR, BanerjeeAK. Dynamics of a cantilever beam attached to a moving base Journal of Guidance, Control, and Dynamics, 1987,10(2):139-151 DOIURL [本文引用: 1]
( LiLiang, ZhangDingguo, HongJiazhen, Dynamics of hub-functionally graded material beam systems Journal of Mechanical Engineering, 2013,49(13):77-84 (in Chinese)) [本文引用: 2]
( FangJianshi, ZhangDingguo, Rigid-flexible couping and frequency analysis of a rotating cantilever beam Chinese Journal of Computational Mechanics, 2012,29(3):333-339 (in Chinese)) [本文引用: 1]
( DuChaofan, ZhangDingguo, A meshfree method based on point interpolation for dynamic analysis of rotating cantilever beams. Acta Phys. Sin, 2015,64(3):396-405 (in Chinese)) [本文引用: 2]
( FanJihua, ZhangDingguo, HongJiazhen, Dynamic analysis of a rotating tapered cantilever beam based on Bezier curve interpolation Journal of Dynamics and Control, 2012,10(4):347-354 (in Chinese)) [本文引用: 1]
范纪华, 章定国 . 基于变形场不同离散方法的柔性机器人动力学建模与仿真 力学学报, 2016,48(4):843-856 DOIURL [本文引用: 1] 研究了基于变形场不同离散方法的柔性机器人动力学建模和仿真问题. 针对多杆空间链式柔性机器人系统,采用假设模态法、有限元法、Bezier 插值方法和B 样条插值方法对柔性杆变形场进行描述,构造统一形式,运用Lagrange 方法,结合4×4 齐次变换矩阵,在计入柔性杆横向弯曲变形引起的纵向缩短的情况下,推导得到多杆空间柔性机器人动力学方程,并编制基于4 种变形场不同离散方法的多杆空间链式柔性机器人仿真软件.通过仿真算例对柔性机器人系统的动力学问题进行研究. 仿真结果表明:有限元法的计算效率较低;假设模态法在处理较大变形问题时其精度低于Bezier 插值方法和B 样条插值方法的精度;作为新的变形体离散方法,Bezier 插值方法和B 样条插值方法可以有效地描述柔性杆的变形场,并能运用到多杆空间柔性机器人动力学建模中. ( FanJihua, ZhangDingguo, Dynamic modeling and simulation of flexible robots based on different discretization methods Chinese Journal of Theoretical and Applied Mechanics, 2016,48(4):843-856 (in Chinese)) DOIURL [本文引用: 1] 研究了基于变形场不同离散方法的柔性机器人动力学建模和仿真问题. 针对多杆空间链式柔性机器人系统,采用假设模态法、有限元法、Bezier 插值方法和B 样条插值方法对柔性杆变形场进行描述,构造统一形式,运用Lagrange 方法,结合4×4 齐次变换矩阵,在计入柔性杆横向弯曲变形引起的纵向缩短的情况下,推导得到多杆空间柔性机器人动力学方程,并编制基于4 种变形场不同离散方法的多杆空间链式柔性机器人仿真软件.通过仿真算例对柔性机器人系统的动力学问题进行研究. 仿真结果表明:有限元法的计算效率较低;假设模态法在处理较大变形问题时其精度低于Bezier 插值方法和B 样条插值方法的精度;作为新的变形体离散方法,Bezier 插值方法和B 样条插值方法可以有效地描述柔性杆的变形场,并能运用到多杆空间柔性机器人动力学建模中.
范纪华, 章定国 . 旋转柔性悬臂梁动力学的Bezier插值离散方法研究 物理学报, 2014,63(15):154501-154501 DOIURL [本文引用: 1] 在旋转柔性梁变形场描述中,引入Bezier插值离散方法. 首先构建旋转运动悬臂梁物理模型,接着采用第二类Lagrange动力学方程和Bezier插值离散方法,在计入柔性梁横向弯曲变形引起的纵向缩短的情况下,推导了旋转柔性梁的刚柔耦合动力学方程,并编制旋转柔性梁的动力学仿真软件,然后通过仿真算例对系统的动力学问题进行研究. 最后将仿真结果与有限元法、假设模态法进行分析比较,验证了提出的Bezier插值离散方法的正确性,并得出Bezier插值离散法的计算效率较高;计算精度符合工程实际需要,高速时计算精度大于假设模态法;Bezier插值离散方法在处理大柔性问题时比假设模态法合理. 因此在多体系统动力学领域具有优良性能和应用价值的Bezier插值离散方法将具有推广价值. ( FanJihua, ZhangDingguo. Bezier interpolation method for the dynamics of rotating flexible cantilever beam Acta Phys. Sin., 2014,63(15):154501-154501 (in Chinese)) DOIURL [本文引用: 1] 在旋转柔性梁变形场描述中,引入Bezier插值离散方法. 首先构建旋转运动悬臂梁物理模型,接着采用第二类Lagrange动力学方程和Bezier插值离散方法,在计入柔性梁横向弯曲变形引起的纵向缩短的情况下,推导了旋转柔性梁的刚柔耦合动力学方程,并编制旋转柔性梁的动力学仿真软件,然后通过仿真算例对系统的动力学问题进行研究. 最后将仿真结果与有限元法、假设模态法进行分析比较,验证了提出的Bezier插值离散方法的正确性,并得出Bezier插值离散法的计算效率较高;计算精度符合工程实际需要,高速时计算精度大于假设模态法;Bezier插值离散方法在处理大柔性问题时比假设模态法合理. 因此在多体系统动力学领域具有优良性能和应用价值的Bezier插值离散方法将具有推广价值.
( FanJihua, ZhangDingguo, B-spline interpolation method for the dynamics of rotating cantilever beam Journal of Mechanical Engineering, 2012,48(23):59-64 (in Chinese)) [本文引用: 1]
( HanGuangcai, WuYanhong, WangYanchao, et al. Dynamic analysis of a rotating blade with a rigid-flexible coupling, pre-twisted angle, and variable cross-section Journal of Harbin Engineering University, 2011(6):736-741 (in Chinese)) [本文引用: 1]
陈思佳, 章定国 . 中心刚体-变截面梁系统的动力学特性研究 力学学报, 2011,43(4):790-794 URL [本文引用: 1] 对在平面内做大范围转动的中心刚体-变截面梁系统的动力学进行了研究.考虑柔性梁横向弯曲变形和纵向伸长变形, 且在纵向位移中计及由于横向变形而引起的纵向缩短项, 即非线性耦合变形项. 采用假设模态法描述变形, 运用第二类Lagrange方程推导得到系统刚柔耦合动力学方程. 在此基础上对做大范围旋转运动的中心刚体-楔形梁以及中心刚体-梯形梁模型的动力学进行了详细研究. 研究表明: 梁宽比、梁高比以及梯形梁变截面位置都对系统的动力学特性有很大影响. ( ChenSijia, ZhangDingguo, Dynamics od hub-varable section beam systems Chinese Journal of Theoretical and Applied Mechanics, 2011,43(4):790-794 (in Chinese)) URL [本文引用: 1] 对在平面内做大范围转动的中心刚体-变截面梁系统的动力学进行了研究.考虑柔性梁横向弯曲变形和纵向伸长变形, 且在纵向位移中计及由于横向变形而引起的纵向缩短项, 即非线性耦合变形项. 采用假设模态法描述变形, 运用第二类Lagrange方程推导得到系统刚柔耦合动力学方程. 在此基础上对做大范围旋转运动的中心刚体-楔形梁以及中心刚体-梯形梁模型的动力学进行了详细研究. 研究表明: 梁宽比、梁高比以及梯形梁变截面位置都对系统的动力学特性有很大影响.
( GaoChentong, LiLiang, ZhangDingguo, et al. Dynamci modeling and simulation of rotating FGM tapered beams with shear effect Chinese Journal of Theoretical and Applied Mechanics, 2018,50(3):210-222 (in Chinese)) [本文引用: 1]
OhSY, LibrescuL, SongO. Vibration of turbomachinery rotating blades made-up of functionally graded materials and operating in a high temperature field Acta Mechanica, 2003,166(1-4):69-87 DOIURL [本文引用: 1]
( WanYunbo, MaRong, WangNianhua, et al. Accurate aero-heating predictions based on multi-dimensional gradient reconstruction on hybrid unstructured grids Chinese Journal of Theoretical and Applied Mechanics, 2018,50(5):1003-1012 (in Chinese)) [本文引用: 1]
( XuXin, LiShirong, Analysis of thermoelastic damping for functionally graded material micro-beam Chinese Journal of Theoretical and Applied Mechanics, 2017,49(2):308-316 (in Chinese)) [本文引用: 1]
( CaoLeilei, PeiJianzhong, ZhangXuemin, et al. Simulation method of steady-state heat conduction in functionally graded material Computer Simulation, 2012,29(8):387-390 (in Chinese)) [本文引用: 1]
( LiuJinyang, YuanRui, HongJiazhen, The on ridig-flexible coupling dynamicperformance for a rectangular plate considering thermal effect Journal of Shanghai Jiaotong University, 2008,42(8):387-390 (in Chinese)) [本文引用: 1]
CuiYQ, YuZQ, LanP. A novel method of thermo-mechanical coupled analysis based on the unified description Mechanism and Machine Theory, 2019,134:376-392 DOIURL [本文引用: 1]
CeponG, StarcB, ZupancicB, et al. Coupled thermo-structural analysis of a bimetallic strip using the absolute nodal coordinate formulation Multibody System Dynamics, 2017,41(4):391-402 DOIURL [本文引用: 1]
李世荣, 苏厚德, 程昌钧 . 热环境中粘贴压电层功能梯度材料梁的自由振动 应用数学和力学, 2009,30(8):907-918 URL [本文引用: 1] 研究了上下表面粘贴压电层的功能梯度材料Euler-Bernoulli梁在升温及电场作用下的屈曲和自由振动行为.在精确考虑轴线伸长基础上,建立了压电功能梯度材料层合梁在热-电-机载荷作用下的几何非线性动力学控制方程.其中,假设功能梯度材料性质沿厚度方向按照幂函数连续变化,上下压电层为各向同性均匀材料.在小振幅和谐振动假设下,上述非线性偏微分方程组被转化为两套相互耦合的常微分方程组,即过屈曲问题的控制方程和过屈曲构形附近的线性振动控制方程.采用打靶法数值求解上述两个耦合的常微分方程边值问题,获得了在均匀电场和横向非均匀升温场作用下两端固定压电-功能梯度材料层合梁在屈曲前和过屈曲构型附近的自由振动响应.绘出了梁的过屈曲平衡路径以及前3阶固有频率随热、电载荷及材料梯度参数变化的特性曲线.结果表明,梁的前3阶频率在屈曲前随着温度升高而减小,在进入过屈曲后它们却随着温度升高而增加.通过施加电压在压电层产生拉应力可有效地提高粱的热屈曲临界载荷,从而提高其固有频率. ( LiShirong, SuHoude, ChengChangjun, Free vibration of functionally Graded material beams with surface-bonded piezeoelectric layers in thermal environment Applied Mathematics and Mechanics, 2009,30(8):907-918 (in Chinese)) URL [本文引用: 1] 研究了上下表面粘贴压电层的功能梯度材料Euler-Bernoulli梁在升温及电场作用下的屈曲和自由振动行为.在精确考虑轴线伸长基础上,建立了压电功能梯度材料层合梁在热-电-机载荷作用下的几何非线性动力学控制方程.其中,假设功能梯度材料性质沿厚度方向按照幂函数连续变化,上下压电层为各向同性均匀材料.在小振幅和谐振动假设下,上述非线性偏微分方程组被转化为两套相互耦合的常微分方程组,即过屈曲问题的控制方程和过屈曲构形附近的线性振动控制方程.采用打靶法数值求解上述两个耦合的常微分方程边值问题,获得了在均匀电场和横向非均匀升温场作用下两端固定压电-功能梯度材料层合梁在屈曲前和过屈曲构型附近的自由振动响应.绘出了梁的过屈曲平衡路径以及前3阶固有频率随热、电载荷及材料梯度参数变化的特性曲线.结果表明,梁的前3阶频率在屈曲前随着温度升高而减小,在进入过屈曲后它们却随着温度升高而增加.通过施加电压在压电层产生拉应力可有效地提高粱的热屈曲临界载荷,从而提高其固有频率.
( LiLiang, ZhangDingguo, GuoYongbin, Dynamics of rigid--flexible coupling Fgm beam systems in variable temperature fields Journal of Vibration Engineering, 2017,30(1):9-19 (in Chinese)) [本文引用: 1]
JavaheriR, EslamiMR. Thermal buckling of functionally graded plates based on higher order theory Journal of Thermal Stresses, 2002,25(7):603-625 DOIURL [本文引用: 1]
ChenY, JinG, ZhangC, et al. Thermal vibration of FGM beams with general boundary conditions using a higher-order shear deformation theory Composites Part B: Engineering, 2018,153:376-386 DOIURL [本文引用: 1]
 ,*,2), 陈立威*, 王明强*, 章定国?, 杜超凡***
,*,2), 陈立威*, 王明强*, 章定国?, 杜超凡*** 
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT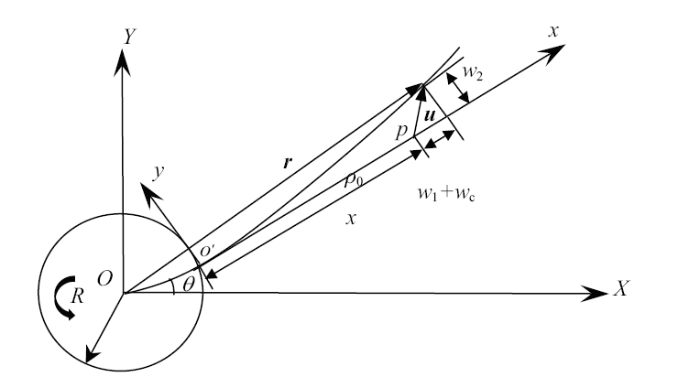 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT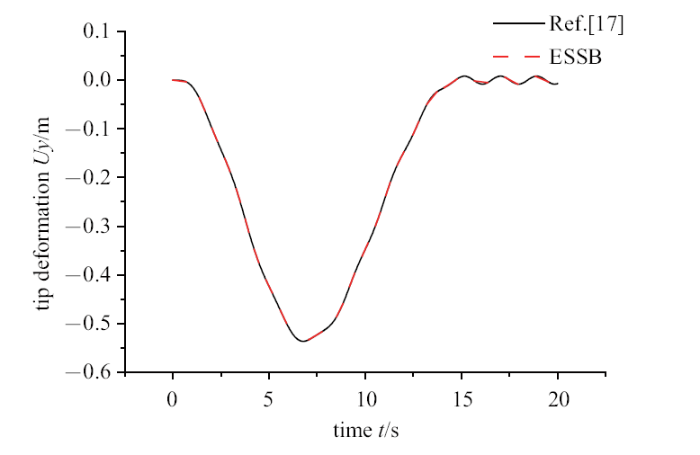 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT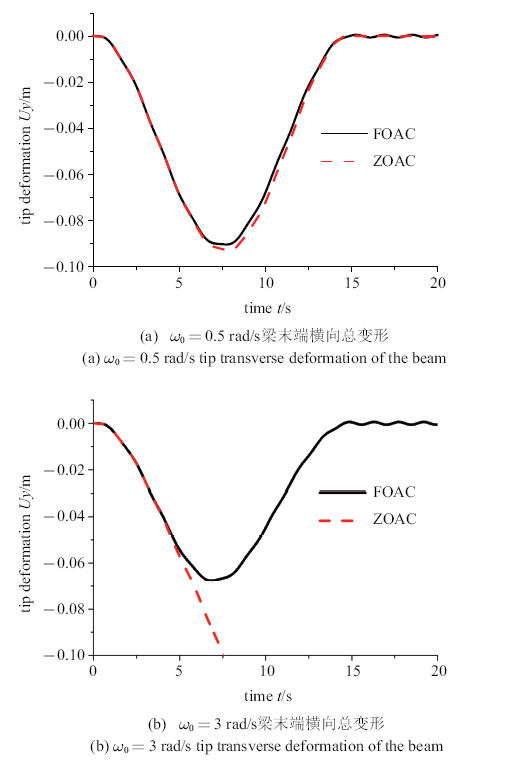 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}