RESEARCH ON ELASTIC LINE METHOD BASED ON ABSOLUTE NODAL COORDINATE METHOD1)
Fan Jihua*,?, Zhang Dingguo,**,2), Shen Hong?* School of Mechatronics and Power Engineering, Jiangsu University of Science and Technology, Zhangjiagang 215600, Jiangsu China ? Suzhou Institute of Technology, Jiangsu University of Science and Technology, Zhangjiagang 215600, Jiangsu China ** School of Sciences, Nanjing University of Science and Technology, Nanjing 210094, China
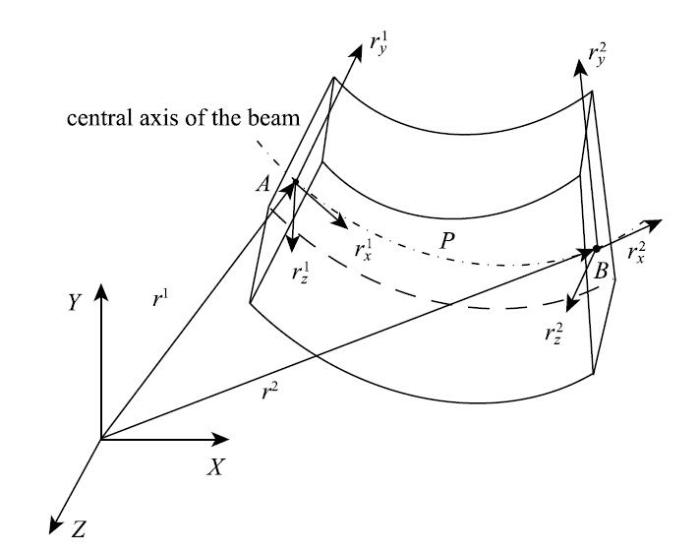
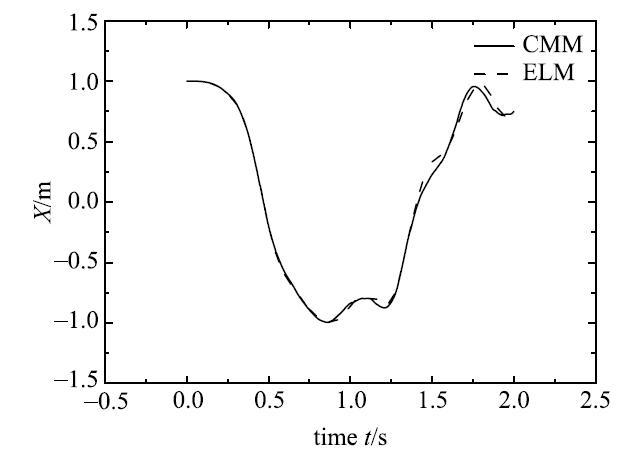
Abstract Compared with the floating frame of reference formulation, the absolute nodal coordinate formulation (ANCF) has significant advantages in dealing with the nonlinear large deformation problem of flexible bodies. ANCF defines the nodal co-ordinates in a global co-ordinate system, uses the global slopes instead of angles to define the orientation of the elements, has a constant mass matrix, and does not have the Coriolis centrifugal force. However,the elastic force matrix is a nonlinear term, and the solution will be time consuming and occupied resources. According to this,the elastic line method is introduced for solving the elastic force, the Green-Lagrangian strain tensor is defined on the centerline, the curvature formula is used to define the bending strain, and the torsion angle formula is used to define the torsional strain. At the same time, the finite element method is used to describe the displacement field of the three-dimensional flexible beam, and the constant mass matrix, the generalized stiffness matrix and the generalized force matrix of the beam element are solved, and then the dynamic equations of the element are obtained. The dynamic equations of the three-dimensional beam are obtained by the transformation matrix. Then the differences between the continuum mechanics method and the elastic line method are pointed out theoretically, and the dynamic simulation software is compiled. Finally, the dynamics behaviors of a flexible pendulum and a tracked vehicle are numerical investigated with the continuum mechanics method and the elastic line method. The results show that the elastic line method can effectively improve the calculation efficiency under the premise of ensuring accuracy. Keywords:absolute nodal coordinate formulation;continuum mechanics method;elastic line method;dynamic simulation;tracked vehicle
PDF (1864KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 范纪华, 章定国, 谌宏. 基于绝对节点坐标法的弹性线方法研究1). 力学学报[J], 2019, 51(5): 1455-1465 DOI:10.6052/0459-1879-19-076 Fan Jihua, Zhang Dingguo, Shen Hong. RESEARCH ON ELASTIC LINE METHOD BASED ON ABSOLUTE NODAL COORDINATE METHOD1). Chinese Journal of Theoretical and Applied Mechanics[J], 2019, 51(5): 1455-1465 DOI:10.6052/0459-1879-19-076
RafieeM, NitzscheF, LabrosseM . Dynamics, vibration and control of rotating composite beams and blades: A critical review Thin-Walled Structures, 2017,119:795-819 [本文引用: 1]
( CaoDengqing, BaiKunchao, DingHu , et al. Advances in dynamics and vibration control of large-scale flexible spacecraft Chinese Journal of Theoretical and Applied Mechanics, 2019,51(1):1-13 (in Chinese)) [本文引用: 1]
LiuJY, HongJZ . Geometric stiffening effect on rigid-flexible coupling dynamics of an elastic beam Journal of Sound and Vibration, 2004,278(4-5):1147-1162 [本文引用: 1]
( GaoChentong, LiLiang, ZhangDingguo , et al. Dynamic modeling and simulation of rotating FGM tapered beams with shear effect Chinese Journal of Theoretical and Applied Mechanics, 2018,50(3):654-666 (in Chinese))
CaiGP, HongJZ, YangSX . Dynamic analysis of a flexible hub-beam system with tip mass Mechanics Research Communications, 2005,32(2):173-190
( HeXingsuo, LiXuehua, DengFengyan . Analysis and imitation of dynamic properties for rigid-flexible coupling systems of a planar flexible beam Acta Physica Sinica, 2011,60(2):024502 (in Chinese))
( ChenSijia, ZhangDingguo, HongJiazhen . A high-order rigid-flexible coupling model of a rotating flexible beam under large deformation Chinese Journal of Theoretical and Applied Mechanics, 2013,45(3):251-256 (in Chinese))
( DuChaofan, ZhangDingguo, HongJiazhen . A meshfree method based on radial point interpolation method for the dynamic analysis of rotating flexible beams Chinese Journal of Theoretical and Applied Mechanics, 2015,47(2):279-288 (in Chinese))
( FanJihua, ZhangDingguo . Dynamic modeling and simulation of flexible robots based on different discretization methods Chinese Journal of Theoretical and Applied Mechanics, 2016,48(4):843-856 (in Chinese))
( ZhangXiaoshun, ZhangDingguo, HongJiazhen . Rigid-flexible coupling dynamic modeling and simulation with the longitudinal deformation induced curvature effect for a rotating flexible beam under large deformation Chinese Journal of Theoretical and Applied Mechanics, 2016,48(3):692-701 (in Chinese))
SujashB, DebabrataD . Free vibration analysis of bidirectional-functionally graded and doubletapered rotating micro-beam in thermal environment using modified couple stress theory Composite Structures, 2019,215:471-492
TianJJ, ZhangZG, HuaHX . Free vibration analysis of rotating functionally graded double-tapered beam including porosities International Journal of Mechanical Sciences, 2019,150:526-538
FangJS, WangHW, ZhangXP . On size-dependent dynamic behavior of rotating functionally graded Kirchhoff microplates International Journal of Mechanical Sciences, 2019,152:34-50 [本文引用: 1]
ShabanaAA. Computational Continuum Mechanics, New York: Cambridge University Press, 2008 [本文引用: 2]
BonetJ, WoodRD. Nonlinear Continuum Mechanics for Finite Element Analysis. Cambridge: Cambridge University Press, 1997 [本文引用: 1]
SimoJC, Vu-QuocL . On the dynamics in space of rods undergoing large motions the planar case: Part I-II. ASME Transactions, Journal of Applied Mechanics, 1986,53:849-863 [本文引用: 1]
BerzeriM, ShabanaAA . Development of simple models for the elastic forces in the absolute nodal coordinate formulation Journal of Sound and Vibration, 2000,235(4):539-565 [本文引用: 2]
OmarMA, ShabanaAA . A two-dimensional shear deformable beam for large rotation and deformation problems Journal of Sound and Vibration, 2001,243(3):565-576 [本文引用: 1]
DufvaKE, SopanenJT, MikkolaAM . A two-dimensional shear deformation beam element based on the absolute nodal coordinate formulation Journal of Sound and Vibration, 2005,280:719-738 [本文引用: 1]
ShabanaAA, YakoubRY . Three dimensional absolute nodal coordinate formulation for beam elements: Theory Journal of Mechanical Design, 2001,123(4):606-613 [本文引用: 1]
YakoubRY, ShabanaAA . Three dimensional absolute nodal coordinate formulation for beam elements: Implementation and applications Journal of Mechanical Design, 2001,123(4):614-621 [本文引用: 1]
TianQ, ZhangY, ChenL , et al. Simulation of planar flexible multibody systems with clearance and lubricated revolute joints Nonlinear Dynamics, 2010,60(4):489-511 [本文引用: 1]
LiuC, TianQ, HuH . New spatial curved beam and cylindrical shell elements of gradient-deficient absolute nodal coordinate formulation Nonlinear Dynamics, 2012,70(3):1903-1918 [本文引用: 1]
( GuoJiawen, WeiCheng, TanChunlin , et al. Analysis of the cored stranded wire rope on the nonlinear bending dynamic characteristics Chinese Journal of Theoretical and Applied Mechanics, 2018,50(2):373-384 (in Chinese)) [本文引用: 1]
( LanPeng, CuiYaqi, YuZuqing . The completed form of elastic model for ANCF thin plate element and its application on dynamic modeling of the leaf spring Chinese Journal of Theoretical and Applied Mechanics, 2018,50(5):1156-1167 (in Chinese)) [本文引用: 1]
( ZhengTong, ZhangDingguo, HongJiazhen . Dynamic modeling and simulation for three dimensional flexible beam systems with large deformations Journal of Mechanical Engineering, 2016,52(19):81-87 (in Chinese)) [本文引用: 2]
( ZhaoChunzhang, YuHaidong, WangHao , et al. Dynamic modeling and kinematic behavior of variable cross-section beam based on the absolute nodal coordinate formulation Journal of Mechanical Engineering, 2014,50(17):38-45 (in Chinese)) [本文引用: 1]
CuiYQ, YuZQ, LanP . A novel method of thermo-mechanical coupled analysis based on the unified description Mechanism and Machine Theory, 2019,134:376-392 [本文引用: 1]
LiuJ, PanK . Rigid-flexible-thermal coupling dynamic formulation for satellite and plate multibody system Aerospace Science and Technology, 2016,52:102-114 [本文引用: 1]
ShenZ, LiH, LiuX , et al. Thermal shock induced dynamics of a spacecraft with a flexible deploying boom Acta Astronautica, 2017,141:123-131 [本文引用: 1]
García-VallejoD, MayoJ, EscalonaJL , et al. Efficient evaluation of the elastic forces and the Jacobian in the absolute nodal coordinate formulation Nonlinear Dynamics, 2004,35(4):313-329 [本文引用: 2]
( ZhangXiaoshun, ZhangDingguo, ChenSijia , et al. Several dynamic models of a large deformation flexible beam based on the absolute nodal coordinate formulation Acta Physica Sinica, 2016,65(9):094501 (in Chinese)) [本文引用: 2]
( ChenYuanzhao, ZhangDingguo, LiLiang . An absolute nodal coordinate formation based on radial point interpolation method for planar slender beams Journal of Vibration Engineering, 2018,31(3):245-254 (in Chinese)) [本文引用: 1]
ChenY, ZhangD, LiL . Dynamic analysis of rotating curved beams by using absolute nodal coordinate formulation based on radial point interpolation method Journal of Sound and Vibration, 2019,441:63-83 [本文引用: 1]
Zemljari$\check{\rmo}$B, A$\check{\rm z}$beV . Analytically derived matrix end-form elastic-forces equations for a low-order cable element using the absolute nodal coordinate formulation Journal of Sound and Vibration, 2019,446:263-272 [本文引用: 1]
LuoK, HuH, LiuC , et al. Model order reduction for dynamic simulation of a flexible multibody system via absolute nodal coordinate formulation Computer Methods in Applied Mechanics and Engineering, 2017,324:573-594 [本文引用: 2]
 ,**,2), 谌宏?
,**,2), 谌宏?
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT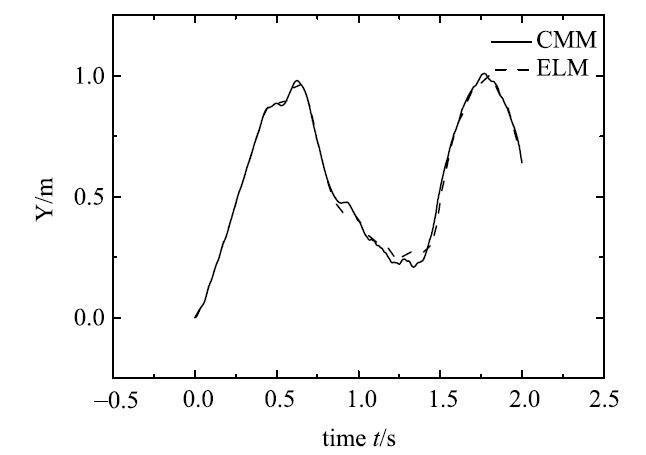 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT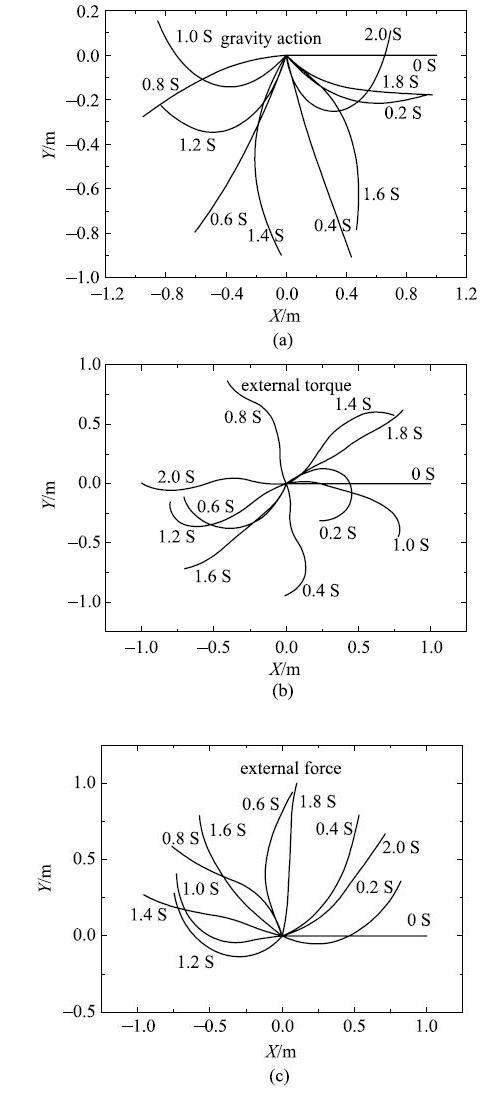 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT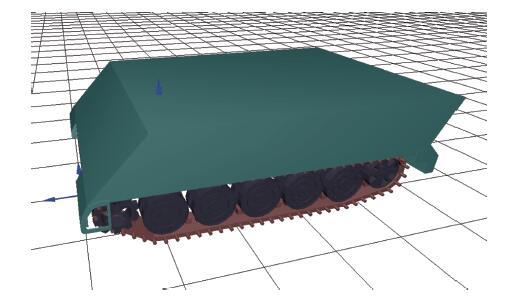 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT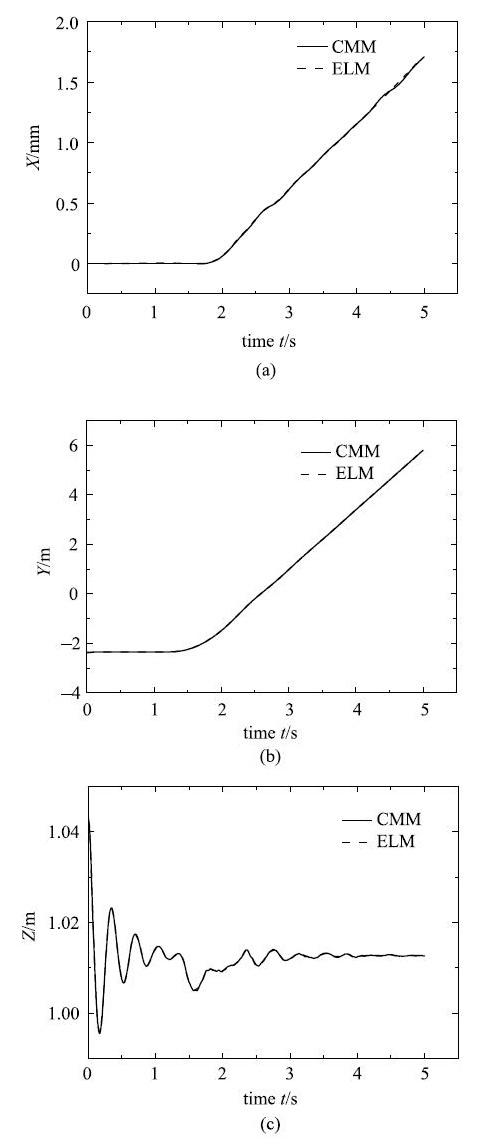 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}