ADVANCES IN DYNAMICS AND VIBRATION CONTROL OF LARGE-SCALE FLEXIBLE SPACECRAFT1)
CaoDengqing*,2),, BaiKunchao†, DingHu**, ZhouXubin††, PanZhongwen***, ChenLiqun**,†††, ZhanShige† *School of Astronautics, Harbin Institute of Technology, Harbin 150001, China†Department of Mathematics and Physics, National Natural Science Foundation of China, Beijing 100085, China**Shanghai Institute of Applied Mathematics and Mechanics, Shanghai University, Shanghai 200072, China††Shanghai Institute of Satellite Engineering, Shanghai 201109, China***Beijing Institute of Space System Engineering, Beijing 100076, China†††School of Science, Harbin Institute of Technology, Shenzhen 518055, Guangdong, China 中图分类号:V411.4,V448 文献标识码:A
关键词:大型柔性航天器;空间结构;非线性动力学;振动控制;姿轨控;多体系统动力学 Abstract With the gradual implementation of the major projects in aerospace engineering, the spacecraft design is heading towards the direction of ultra-high speed, large scale and multi-function, and its launching and operating environment is likely to worsen. The problems on vibration and active and/or passive control in spacecraft launching process, dynamic modeling and response analysis of large flexible spacecraft in orbit, and the hybrid control of structural vibration and attitude maneuver of the spacecraft are getting more and more complicated and difficult to deal with. The enlarged scale and increased flexibility of the spacecraft structure (suchas the large aperture antenna and solar panels) present a challenge to the ground test and semi-physical simulation. The dynamics and control problems involved in the large-scale flexible spacecraft such as the whole-spacecraft vibration isolation in the spacecraft lunching process, the dynamic modeling and vibration response analysis of large-scale flexible structures, and the coupling dynamics and hybrid control of structural vibration and attitude and or orbital maneuver of the large-scale flexible spacecraft are presented. The key scientific issues seriously in the fields of spacecraft dynamics and control could then be extracted as follows: the dynamic modeling and order reduction of multi-rigid flexible body systems (including the dynamic modeling of the flexible structure with large deformation, the collaborate simulations with multi-solvers, model reductions, the analytical approach for the dynamic modeling of composite structures, etc.), the construction of state space model of complicated structures and its controllability investigation (including the theoretical and experiment methods of the state space model formulation, the observability and controllability of the control system for complex structures, etc.), and the design of hybrid control law of structural vibration and attitude maneuver for the large-scale flexible spacecraft (concerning the robust hybrid control of attitude maneuver and structural vibration, the collaborative control of actuating mechanism and piezoelectric actuator, etc.
Keywords:large-scale flexible spacecraft;space structures;nonlinear dynamics;vibration control;attitude and orbital maneuvering;multi-body system dynamics -->0 PDF (23857KB)元数据多维度评价相关文章收藏文章 本文引用格式导出EndNoteRisBibtex收藏本文--> 曹登庆, 白坤朝, 丁虎, 周徐斌, 潘忠文, 陈立群, 詹世革. 大型柔性航天器动力学与振动控制研究进展1)[J]. 力学学报, 2019, 51(1): 1-13 https://doi.org/10.6052/0459-1879-18-054 CaoDengqing, BaiKunchao, DingHu, ZhouXubin, PanZhongwen, ChenLiqun, ZhanShige. ADVANCES IN DYNAMICS AND VIBRATION CONTROL OF LARGE-SCALE FLEXIBLE SPACECRAFT1)[J]. Chinese Journal of Theoretical and Applied Mechanics, 2019, 51(1): 1-13 https://doi.org/10.6052/0459-1879-18-054 航天事业的发展关乎国家战略利益与安全,运载火箭、民用空间基础设施、空间宽带互联网、在轨维护与服务系统、载人航天与探月工程、深空探测等已经成为国家创新管理、资源环境保护、提供信息服务以及培育新兴产业不可或缺的重点产品和重大航天工程.围绕经济社会发展和国家安全重大需求,《中国制造2025重点领域技术路线图》选择十大战略产业实现重点突破,力争到2025年处于国际领先地位或国际先进水平,其中重型运载火箭、高定位精度卫星平台、高性能有效载荷、深空探测器以及相关地面设备等航天重大装备是我国由"航天大国"向"航天强国"转变的高端装备. 随着航天重大工程的逐步实施,航天器正朝着超高速、超大尺度、多功能的方向发展,其面临的发射和运行环境也更加恶劣.大型柔性航天器发射过程中的主/被动隔振与减振、在轨运行中航天器及其有效载荷的动态响应、航天器柔性结构的振动及其控制、结构振动与飞行器姿态的混合控制等问题越来越复杂且难于处理;航天器结构的大型化和柔性化(如大阵面天线和大挠性航天器等)也对其地面试验和半实物仿真提出了挑战. 按照研究对象间的相互关系,航天器动力学与控制可分为跨航天器动力学与控制、航天器系统级动力学与振动控制以及航天器部件级动力学与振动控制.黄文虎等[1]详细总结了2012年以前国内外在涉及上述三个方面的相关研究方向上取得的成果.本文在对大型柔性航天器涉及的若干动力学与振动控制问题及其研究现状进行详细综述的基础上,提炼出航天动力学与振动控制领域亟待解决的若干基础科学问题,包括多刚柔体系统动力学建模与模型降阶、复杂结构状态空间模型构建方法与能控性、航天器姿态运动与大型柔性结构振动的混合控制律设计等,并指出其未来发展方向.
航天器在发射过程中需承受极为复杂和严酷的动力学环境[3],包括由运载火箭发动机推力产生的近似稳态的加速度环境、由发动机工作和火箭跷振效应产生的低频振动环境、由发动机点火、关机和级间分离产生的瞬态振动环境、由火工装置或其他分离装置产生的爆炸冲击环境以及整流罩外气动噪声通过结构传递的高频随机振动环境等.包括发动机振动和火箭跷振在内的振动载荷通过运载火箭与航天器之间的连接部件(适配器或卫星支架)传递到航天器,从而引发航天器整体以及各部件结构的振动[4].由于运载工具有效空间的限制,柔性航天器的空间结构(如太阳能帆板、雷达天线阵列、空间桁架等)不得不以折叠状态固定在载荷舱内,待发射入轨后再逐步展开,锁定并保持预定的几何构形.尽管大型柔性航天器在发射过程中,其空间结构大都以折叠状态固定,但其为数众多的连接结构也使其对发射的动力学环境提出了更高的要求.改善航天器的振动环境的一个有效的途径是对发射过程中的航天器(整星)进行隔振,它利用被动、主动或主/被动一体化的隔振平台来改造或替代原有的星箭连接适配器,从而达到降低作用于航天器振动载荷的目的.为了对发射阶段的大型柔性航天器进行有效隔振,提高其发射的安全性和可靠性,整星的主/被动振动控制近年来引起了从事航天器动力学与控制的科学家与工程师们的极大重视[5]. 以减小航天器发射时所承受的环境载荷为目标,对卫星支架或适配器进行结构设计,或在适配器与星箭界面之间加装隔振平台的方法称为整星隔振.与土木、机械等工程领域中结构或仪器设备的隔振方法一样,整星隔振也分为被动隔振、主动隔振、半主动隔振以及主被动一体化隔振.20世纪90年代初,美国加州空间管理局(CSA)工程公司开始针对小型运载火箭和小卫星开展整星隔振和抗冲性能研究,探索整星隔振的可行性, 并进行整星隔振器的设计和性能分析. 针对中小型运载火箭与3t左右的航天器之间振动隔离问题,美国CSA工程公司和美国空间研究实验室(Air Force Research Laboratory)设计了用以替代原适配器的整星被动隔振系统(见图1),试验结果表明其隔振效果良好[6]. 显示原图|下载原图ZIP|生成PPT 图1运载火箭与具备隔振性能的适配器... -->Fig. 1Launch vehicle and adapter with performance of vibration isolation... -->
大推力火箭发动机及重型运载火箭,长寿命、高可靠、高定位精度先进卫星平台,高性能、新型有效载荷,载人航天及在轨维护与服务平台等航天重大装备的发展使得航天器朝着超高速、超大尺度、多功能的方向发展.与此同时,航天器发射过程中的振动与主/被动振动控制、在轨运行中大型柔性航天器动力学建模与动态响应分析、结构振动与飞行器姿态的混合控制等问题也变得越来越复杂且难于处理.针对大型柔性航天器发射过程中的振动与隔振,大型柔性航天器在轨运行状态的动力学建模与振动响应分析,大型柔性结构振动与航天器姿轨控耦合动力学与混合控制等航天重大装备中涉及到的动力学与控制问题,提炼出了多刚柔体系统动力学建模与模型降阶、复杂结构状态空间模型构建与能控性研究、航天器姿态运动与大型柔性结构振动的混合控制律设计等航天动力学与控制领域中亟待解决的若干基础科学问题. The authors have declared that no competing interests exist.
(HuangWenhu, CaoDengqing,HanZengyao. Advances and trends in dynamics and control of spacecraft .Advances in Mechanics, 2012, 42(4): 367-394 (in Chinese))URL [本文引用: 4]
(MaXingrui, YuDengyun,HanZengyao, et al.Research evolution on the satellite-rocket mechanical environment analysis and test technology .Journal of Astronautics, 2006, 27(3): 323-331 (in Chinese))URL [本文引用: 1]
(WangQingwei, TanShujun, WuZhigang, et al.Dynamic modeling and analysis of large-loop coupled by attitude control and pogo for large liquid rockets .Chinese Journal of Theoretical and Applied Mechanics, 2015, 47(5): 789-798 (in Chinese))URL [本文引用: 1]
(ZhangJun, ChenYong, LuoJian, et al.Review of the whole-spacecraft isolation techniques .Acta Aeronauticaet Astronautica Sinica, 2006, 26(2): 179-183 (in Chinese))URL [本文引用: 1]
[6]
WilkePS, JohnsonCD, FosnessER.Whole-spacecraft passive launch isolation .Journal of Spacecraft and Rockets, 1998, 35(5): 690-694 [本文引用: 1]
[7]
WilkePS, Johnson CD. Recent launches using the softride wholespacecraft vibration isolation system// Proceedings of the AIAA Space 2001 Conference, Albuquerque,NM, 2001: AIAA-2001-4078 [本文引用: 1]
[8]
LiuLK, LiangL, ZhengGT, et al.Dynamic design of octo-strut platform for launch stage whole-spacecraft vibration isolation .Journal of Spacecraft and Rockets, 2005, 42(4): 654-662 [本文引用: 1]
[9]
WangZ, LiuLK, ZhengGT.Optimal design of octo-strut vibration isolation platform .Journal of Guidance, Control, and Dynamics, 2006, 29(3): 749-753 [本文引用: 1]
[10]
ZhangYW, FangB, ChenY.Vibration isolation performance evaluation of the discrete whole-spacecraft vibration isolation platform for flexible spacecraft .Meccanica, 2012, 47: 1185-1195URL [本文引用: 1]
[11]
YangK, ZhangYW, DingH, et al.Nonlinear energy sink for wholespacecraft vibration reduction .Journal of Vibration and Acoustics, 2017, 139: 021011 [本文引用: 1]
(LuZeqi, ChenLiqun.Some recent progresses in nonlinear passive isolations of vibrations .Chinese Journal of Theoretical and Applied Mechanics, 2017, 49(3): 550-564 (in Chinese))URL [本文引用: 1]
[13]
ThayerD, CampbellM, VagnersJ.Six-axis vibration isolation system using soft actuators and multiple sensors .Journal of Spacecraft and Rockets, 2002, 39(2): 206-212 [本文引用: 1]
[14]
Marne_eB, AvraamM, DeraemaekerA, et al. Vibration isolation of precision payloads: A six-axis electromagnetic relaxation isolator .Journal of Guidance, Control, and Dynamics, 2009, 32(2): 395-401 [本文引用: 1]
[15]
ZhangY, ZangJ, FangB, et al.Dynamic characteristics of integrated active and passive whole-spacecraft vibration isolation platform based on non-probabilistic reliability .Transactions of the Japan Society for Aeronautical and Space Sciences, 2014, 57(5): 263-271URL [本文引用: 1]
[16]
YangX, WuH, LiY, et al.Dynamic isotropic design and decentralized active control of a six-axis vibration isolator via Stewart plat form .Mechanism and Machine Theory, 2017, 117: 244-252 [本文引用: 1]
[17]
ChiW, CaoD, WangD, et al.Design and experimental study of a VCM-based Stewart parallel mechanism used for active vibration isolation .Energies, 2015, 8: 8001-8019 [本文引用: 1]
[18]
WuY, YuK, JiaoJ, et al.Dynamic isotropy design and analysis of a six-DOF active micro-vibration isolation manipulator on satellites .Robotics and Computer-Integrated Manufacturing, 2018, 49: 408-425 [本文引用: 1]
[19]
TangJ, CaoD, YuT.Decentralized vibration control of a VCM-Based Stewart parallel mechanism: simulation and experiments .Journal of Mechanical Engineering Science, 2018. DOI: 10.1177/0954406218756941URL [本文引用: 1]
(HuHaiyan, TianQiang, ZhangWei, et al.Nonlinear dynamics and control of large deployable space structures composed of trusses and meshes .Advances in Mechanics, 2013, 43(4): 390-414(in Chinese))URL [本文引用: 1]
(QuGuangji.Development and challenge of spacecraft dynamics technology .Structure and Environment Engineering, 2003, 30(4): 1-6 (in Chinese))URL [本文引用: 1]
(LiaoBingqi, QuGuangji, XiaSuiqin, et al.On the order reduction of dynamics models of flexible spacecraft .Engineering Science, 2001, 3(11): 60-64 (in Chinese))URL [本文引用: 1]
[24]
MettlerE, QuadrelliMB.Multibody dynamics modeling of segmented booms of the mars express spacecraft .Journal of Spacecraft and Rockets, 2005, 42(3): 523-529 [本文引用: 1]
(JiangJianping and LiDongxu. Research on rigid-flexible coupling dynamics of spacecraft with solar panel .Acta Aeronauticaet Astronautica Sinica, 2006, 27(3): 418-422 (in Chinese))URL [本文引用: 1]
(ZhangYue, ZhaoYang, TanChunlin, et al.The strain coupling problem and model decoupling of ANCF cable/beam element .Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(6): 1406-1415 (in Chinese))URL [本文引用: 1]
(ZhangXiaoshun, ZhangDingguo, HongJiazhen.Rigid-flexible coupling dynamic modeling and simulation with the longitudinal deformation induced curvature e_ect for a rotating flexible beam under large deformation .Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(3): 692-701 (in Chinese))URL [本文引用: 1]
(HeXingsuo, DengFengyan, ZhangLiexia, et al.Dynamics modeling of large coupled rigid flexible space platform system .Mechanical Science and Technology, 2004, 23(5): 543-545 (in Chinese))URL [本文引用: 2]
(FangNiu, LiuYuliang, ZhaoGuiping.Dynamic modeling and analysis for flexible spacecraft with dynamic sti_ening .Journal of Ordnance Equipment Engineering, 2017, 38(9): 67-72 (in Chinese))URL [本文引用: 1]
[30]
XuW, MengD, ChenY, et al.Dynamics modeling and analysis of a flexible-base space robot for capturing large flexible spacecraft .Multibody System Dynamics, 2014, 32(3): 357-401URL [本文引用: 3]
(GuoQiwei, WuSong, LiuFang, et al.The e_ect and change rule of spacecraft flexible annex on system natural vibration characteristics .Journal of Vibration and Shock, 2016, 35(6): 187-191 (in Chinese))URL [本文引用: 1]
(HuHaiyan, TianQiang, ZhangWei, et al.Nonlinear dynamics and control of large deployable space structures composed of trusses and meshes .Advances in Mechanics, 2013, 43(4): 390-414(in Chinese))URL [本文引用: 1]
(WangWei, YuDengyun, MaXingrui.Advances and trends of non-linear dynamics of space joint-dominated structure .Advances in Mechnics, 2006, 36(2): 233-238 (in Chinese))URL
(CaoDengqing, ChuShiming, LiZhengfa, et al.Study on the non-smooth mechanical models and dynamics for space deployable mechanisms .Chinese Journal of Theoretical and Applied Mechanics, 2013, 45(1): 3-15 (in Chinese))URL [本文引用: 1]
(BaiZhengfeng, ZhaoYang, TianHao.Dynamics and simulation of deployment for solar panels with hinge clearance .Journal of Harbin Institute of Technology, 2009, 41(3): 11-14 (in Chinese))URL [本文引用: 1]
(WeiFei, ZhengGangtie.Nonlinear dynamics of spacecraft with nonlinear joints .Journal of Vibration Engineering, 2009, 22(4): 329-334 (in Chinese))URL [本文引用: 1]
(LiuFushou, JinDongping.Equivalent circular ring model for the radial vibration analysis of hoop truss structures .Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(5): 1184-1191 (in Chinese))URL [本文引用: 1]
[39]
ModiVJ.Attitude dynamics of satellites with flexible appendagesa brief review .Journal of Spacecraft and Rockets, 1974, 11(11): 743-751 [本文引用: 1]
[40]
LikinsP.Spacecraft attitude dynamics and control-a personal perspective on early developments .Journal of Guidance, Control, and Dynamics, 1986, 9(2): 129-134 [本文引用: 1]
(YinTingting, DengZichen, HuWeipeng, et al.Dynamic modelling and simulation of orbit and attitude coupling problems for structure combined of spatial rigid rods and spring .Chinese Journal of Theoretical and Applied Mechanics, 2018, 50(1): 87-98 (in Chinese))URL [本文引用: 1]
[42]
CaiGP, HongJZ, YangSX.Model study and active control of a rotating flexible cantilever beam .International Journal of Mechanical Sciences, 2004, 46(6): 871-889URL [本文引用: 1]
[43]
CaiGP, LimCW. Active control of a flexible hub-beam system using optimal tracking control method .International Journal of Mechanical Sciences, 2006, 48(10): 1150-1162 [本文引用: 1]
[44]
BanerjeeAK, PedreiroN, SinghoseWE.Vibration reduction for flexible spacecraft following momentum dumping with/without slewing .Journal of Guidance, Control, and Dynamics, 2001, 24(3): 417-427 [本文引用: 1]
[45]
HuQL, ShiP, GaoH.Adaptive variable structure and commanding shaped vibration control of flexible spacecraft .Journal of Guidance, Control, and Dynamics, 2007, 30(3): 804-815 [本文引用: 1]
(HuJun, ZhangGuoqi, ZhangZhifang, et al.New orbit control method to reduce solar panel vibration during orbit maneuvering.Manned Spaceflight, 2011(2): 15-23 (in Chinese))URL [本文引用: 1]
[47]
LunL, CaoDQ.Dynamic modeling for a flexible spacecraft with solar arrays composed of honeycomb panels and its proportional- derivative control with input shaper .Journal of Dynamic Systems, Measurement, and Control-Transactions of the ASME, 2016, 138: 081008 [本文引用: 1]
[48]
SinghSN, ZhangR.Adaptive output feedback control of spacecraft with flexible appendages by modeling error compensation .Acta Astronautica, 2004, 54(4): 229-243URL [本文引用: 1]
[49]
AzadiM, FazelzadehS, EghtesadM, et al.Vibration suppression and adaptive-robust control of a smart flexible satellite with three axes maneuvering .Acta Astronautica, 2011, 69(5): 307-322 [本文引用: 1]
[50]
50 HuQL. Sliding mode maneuvering control and active vibration damping of three-axis stabilized flexible spacecraft with actuator dynamics .Nonlinear Dynamics, 2008, 52: 227-248URL [本文引用: 1]
[51]
HuQ, CaoJ, ZhangY.Robust backstepping sliding mode attitude tracking and vibration damping of flexible spacecraft with actuator dynamics .Journal of Aerospace Engineering, 2009, 22(2): 139-152 [本文引用: 1]
[52]
da FonsecaIM, RadeDM, GoesLCS. Attitude and vibration control of a satellite containing flexible solar arrays by using reaction wheels, and piezoelectric transducers as sensors and actuators .Acta Astronautica, 2017, 139: 357-366 [本文引用: 1]
(TaoJiawei, ZhangTao.Robust adaptive attitude maneuvering and vibration reducing control of flexible spacecraft with input saturation .Electric Machines and Control, 2018, 22(3): 105-113 (in Chinese))URL [本文引用: 1]
(YuanGuoping, ShiXiaoping, LiLong.Adaptive robust attitude maneuver control of a flexible spacecraft with active vibration suppression .Journal of Vibration and Shock, 2013, 32(12): 110-115 (in Chinese))URL [本文引用: 1]
[55]
CaoDQ, SongMT, ZhuWD, et al.Modeling and analysis of the inplane vibration of a complex cable-stayed bridge .Journal of Sound and Vibration, 2012, 331(26),5685-5714URL [本文引用: 1]
[56]
SongMT, CaoDQ, ZhuWD.Dynamic analysis of a micro-resonator driven by electrostatic combs .Communications in Nonlinear Science and Numerical Simulation, 2011, 16(8): 3425-3442URL [本文引用: 1]
[57]
WeiJ, CaoD, WangL, et al.Dynamic modeling and simulation of flexible spacecraft with flexible joints .International Journal of Mechanical Sciences, 2017,130: 558-570 [本文引用: 1]
[58]
BrǘlsO, DuysinxP, GolinvalJC.The global modal parameterization for non-linear model-order reduction in flexible multibody dynamics .International Journal for Numerical Methods in Engineering, 2007, 69(5): 948-977 [本文引用: 1]
[59]
LuoK, HuH, LiuC, et al.Model order reduction for dynamic simulation of a flexible multibody system via absolute nodal coordinate formulation .Computer Methods in Applied Mechanics and Engineering, 2017, 324: 573-594. [本文引用: 1]
 , 白坤朝
, 白坤朝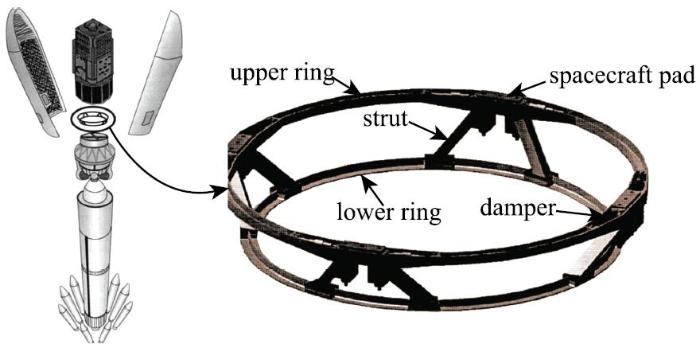 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT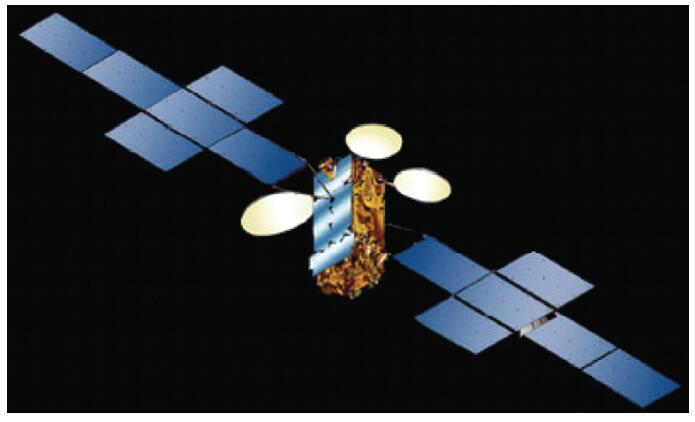 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}