FLOW CONTROL OVER A CIRCULAR CYLINDER USING PLASMA ACTUATORS1)
ZhangXin*,2),, HuangYong?, LiHuaxing* *School of Aeronautics, Northwestern Polytechnical University, Xi'an 710072, China?China Aerodynamics Research and Development Center, Mianyang 621000, Sichuan, China 中图分类号:V211.A 文献标识码:A
关键词:移动附面层控制;流动控制;等离子体;介质阻挡放电;风洞实验 Abstract In order to develop a novel technology of Moving Surface Boundary Layer Control (MSBLC) and promote efficiency of flow control technology, flow control over a circular cylinder using two Dielectric Barrier Discharge (DBD) symmetrical plasma actuators was investigated by PIV technology, force measurements and hot wire. The circular cylinder which had a diameter of 50 mm and a spanwise length of 480 mm was placed on the support sting. Here, two symmetrical DBD plasma actuators were mounted at the top and bottom of the circular cylinder respectively. The testing model which was made of aluminum was adopted as the covered electrode and was wrapped by the KAPTON film. The exposed electrodes were copper foil tape which was 2 mm wide and 0.02 mm in thickness. Firstly, time-resolved PIV results in still air indicated that a pair of the starting vortexes which were rotating in the opposite direction was induced as the symmetrical plasma actuator was just started to work. The starting vortexes rolled up and moved away from the wall with time. Then, a bi-directional wall jet on both sides of the exposed electrode was formed by the symmetrical plasma actuator. Due to Coanda Effect, the induced jet moved along the surface of circular cylinder. Secondly, the force and hot wire measurement results under incoming flow suggested that vortex shedding from the circular cylinder can be suppressed significantly by the symmetrical plasma actuators and the drag coefficient was decreased by 21.8% at the wind speed of 10 m/s. Besides, it can be found that a steady vortex can be formed on the surface of cylinder thanks to the interaction effect between the incoming flow and the induced flow filed by plasma actuator. The induced vortex can transfer high momentum from main flow to the near-wall fluid by rotating and moving, enabling the boundary layer to withstand the adverse pressure gradient and prevent the separation around the circular cylinder and acting as the virtual MSBLC. Compared to the traditional MSBLC, the novel technology of MSBLC which is based on plasma actuator without sophisticated and cumbersome devices cannot bring extra drag and has vast application prospect.
图2给出了传统非对称布局激励器的布置示意图.激励器主要由暴露电极、植入电极、绝缘介质以及高压电源等组成.暴露电极与植入电极由绝缘介质隔开,并分别与高压电源输出端相连.当交流电压超过一定阈值时,暴露电极周围的空气发生电离,激励器诱导产生了带电粒子.这些带电粒子在电场作用下,发生了定向运动.在运动过程中,带电粒子与中性分子产生了碰撞,从而形成了射流[21-27]. 显示原图|下载原图ZIP|生成PPT 图2传统的非对称布局等离子体激励器 -->Fig.2The layout of an asymmetrical plasma actuator -->
本文采用对称布局激励器开展实验研究(如图3所示).与非对称布局激励器相比,对称布局激励器的植入电极宽度覆盖了暴露电极的两端.因此,暴露电极两侧的空气都会发生电离[28-29].对称布局激励器会在暴露电极两侧诱导产生两股方向相反的射流[30-31].在实验结果部分,笔者会对该激励器的诱导流场特性进行分析. 显示原图|下载原图ZIP|生成PPT 图3对称布局等离子体激励器 -->Fig.3The layout of a symmetrical plasma actuator -->
2 静止空气下激励器诱导流场特性研究
2.1 实验系统
图4给出了实验设备布局图.为了避免环境气流对实验结果的干扰,将安装有激励器的圆柱模型放置在箱体内.该箱体由有机玻璃制成,其长宽高分别为80 0mm$\times $600 mm$\times$600 mm. 圆柱通过连接件与支撑底座相连. 圆柱直径为50 mm,展长为480mm,材料为铝. 激光器布置在箱体顶端,激光片光与圆柱中心截面重合.激光器的最大重复频率为20 kHz,单脉冲能量为30 mJ.CCD相机布置在箱体侧面. 相机分辨率为1024$\times$1024,拍摄视场面积为54 mm$\times$ 54 mm,采集频率为3.6kHz. 数据处理时,运算窗口大小为16$\times$16,重叠量为50%,速度误差小于3%. 显示原图|下载原图ZIP|生成PPT 图4静止空气下PIV实验设备布局图 -->Fig.4Schematic of the experimental set-up for PIV measurements in still air -->
图5给出了激励器诱导速度场随时间的变化情况. 其中$U_{\rm p -p}$代表峰峰值电压,$f$表示激励频率;$U_{\rm p}$代表诱导流场沿$x$方向的速度,$V_{\rm p}$表示诱导流场沿$y$方向的速度. $T^\ast(T^{\ast }=tU^{2}_{\rm pmax}/\nu $)表示无量纲时间,$ U_{\rm pmax}$表示在$x$方向上诱导流场速度的最大值,$\nu$表示动力黏性系数[32].由图可知,(1)激励器在刚工作瞬间,会在壁面附近产生一层等离子体.等离子体排挤了壁面附近的空气,使得壁面附近的压力降低.在压力差的作用下,暴露电极上方的空气会被"拉拽"到暴露电极附近,从而产生启动涡[32-34](如图5(a)所示);随着时间的推移,启动涡逐渐向远离壁面的方向运动(如图5(b)所示);(2)随着时间的增加,诱导射流速度逐渐提高.刚开始激励时,激励器诱导射流往远离壁面的方向流动(如图5(c)所示);当$T^{\ast}=466~749$时,与平板等离子体激励器诱导射流不同[35-36],在柯恩达效应的作用下,诱导射流逐渐向壁面方向发展(如图5(d)所示);(3)与传统的非对称布局激励器相比,对称布局激励器会在暴露电极两侧产生速度近似相等的双向射流. 显示原图|下载原图ZIP|生成PPT 图5静止空气下激励器诱导速度场随时间变化($U_{\rm p - p}=19.6$ kV, $f=3$ kHz) -->Fig.5Development of the velocity field induced by the DBD plasma actuator in still air -->
3 圆柱绕流控制研究
3.1 实验系统
3.1.1 风洞 实验在中国空气动力研究与发展中心的电空气动力学研究型低速风洞中进行.该风洞是一座直流、开口风洞. 实验段尺寸为:750 mm$\times $750mm$\times $1050 mm. 稳定风速范围2 m/s$\sim $55m/s,湍流度小于0.2%. 3.1.2 模型及支撑 采用直径为50 mm,展长为480 mm的圆柱模型开展实验. 模型的材质为铝.如图6所示,圆柱采用竖直方式支撑,与应变天平通过支杆连接.通过采用上下端板的方式消除三维效应.上端板采用有机玻璃制成,便于开展流场显示与PIV实验. 显示原图|下载原图ZIP|生成PPT 图6测力实验设备布局图 -->Fig.6Schematic of the experimental set-up for force measurements -->
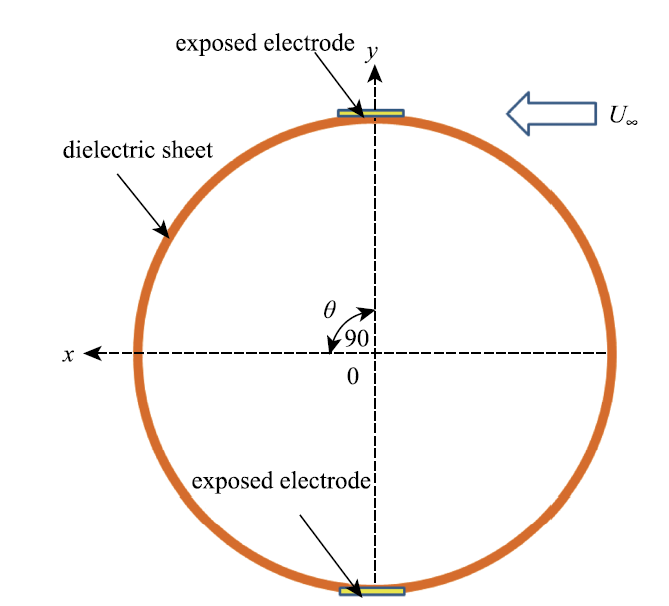
新窗口打开 3.1.4 粒子图像测速技术 在开展PIV实验时,激光器布置在风洞侧面,激光片光与圆柱横截面重合,定位于选定平面.CCD相机布置在风洞顶端,摄像头轴线与片光垂直相交于测量平面.该实验使用的PIV设备与静止空气下激励器诱导流场特性实验所用的PIV设备相同. 3.1.5 热线 采用Dantec公司研制的热线风速仪开展尾流场测量.该系统主要包括信号调理器、探头标定器、测控处计算机、探头和电缆附件等. 3.1.6 激励器 如图7所示,采用两组对称布局激励器开展实验.植入电极为整个金属模型,暴露电极为铜箔胶带. 铜箔胶带的厚度为0.05mm,宽度为2 mm. 采用3层聚酰亚胺胶带作为绝缘介质包裹在模型表面.该绝缘胶带的单层厚度为0.1 mm. 坐标原点位于圆心.两组激励器的暴露电极中心分别位于在$\pm 90^\circ$的位置. 显示原图|下载原图ZIP|生成PPT 图7激励器布置示意图 -->Fig.7Schematic of the cross section of cylinder -->
3.2 实验结果
3.2.1 测力实验 在10m/s的风速下,开展了测力实验研究(基于圆柱直径的雷诺数为3.24$\times$10$^{4})$. 激励频率为3 kHz,激励电压峰峰值的范围为12.8 kV$\sim$19.6 kV. 图8给出了施加激励后,阻力系数减小量随激励电压的变化情况.由图8可知,模型阻力系数减小量随激励电压的升高而增加.当激励电压的峰峰值为19.6 kV时,阻力系数减小量达到了21.8%. 显示原图|下载原图ZIP|生成PPT 图8阻力系数减小量随激励电压变化情况 -->Fig.8The reduction of drag coefficient versus voltage amplitude -->
能耗比(获得的收益/消耗的功率)是评估激励器工作效率,考核流动控制技术成熟度的关键指标.如何提高激励器能耗比,是流动控制技术实现工程化应用的难点.本文以文献[37]中描述的消耗功率系数为基础,针对分离流控制,提出了等离子体激励器能耗比系数$\eta$. $\eta =\Delta C_{\rm D}/C_{\rm E}$,其中$\Delta C_{\rm D}$表示阻力系数的减小量. $C_{\rm E}$代表激励器消耗功率系数: $$C_{E} = \frac{P_{ avg} }{q_\infty U_\infty D} (1)$$ 其中,$P_{\rm avg/m}$表示单位长度内激励器消耗功率,$q_{\infty}$代表速压,$U_{\infty}$表示来流速度,$D$表示圆柱直径. 图9给出了能耗比系数随激励电压变化的情况.由图可知,刚开始增大激励电压时,能耗比系数大幅增加.随后,能耗比系数随电压升高的增幅降低.当激励电压达到一定阈值后,继续增大电压,能耗比系数开始下降.因此,优化激励电压是提高激励器能耗比系数,降低消耗功率的关键之一. 显示原图|下载原图ZIP|生成PPT 图9能耗比系数随激励电压变化情况 -->Fig.9The energy efficiency versus voltage amplitude -->
3.3.3 热线测量 在10m/s的风速下,采用热线探针开展了尾流场测量,进一步对等离子体激励器控制圆柱尾涡的效果进行评估.实验时,在$x/D=5$,$y/D=1$处进行数据采集.采集频率为1024Hz,采样时间为40 s.图10给出了施加控制前后,尾流场弦向脉动速度功率谱的变化情况.从图9可以看出,施加激励前,功率谱存在一个显著的无量纲频率尖峰$0.215~(St=fD/U_{\infty}$,其中$f$表示涡脱频率,$D$表示圆柱直径,$U_{\infty}$表示来流速度),表明圆柱尾流场存在较为规则的涡街.施加激励后,功率谱中的尖峰消失,尾流场中的脱落涡得到有效抑制. 显示原图|下载原图ZIP|生成PPT 图10施加控制前后圆柱尾流脉动速度功率谱 -->Fig.10Power spectra of the streamwise fluctuating velocity with and without plasma actuation -->
3.3.3 PIV实验 为了探索流动控制机理,采用高速PIV系统,在3m/s的风速下开展了流动测量研究(基于圆柱直径的雷诺数为0.97$\times$10$^{4})$.图11与图12分别给出了施加控制前后,圆柱绕流时均速度场与时均流场的分布情况. 显示原图|下载原图ZIP|生成PPT 图11施加控制前后时均速度场分布 -->Fig.11Time-averaged velocity distribution around a circular cylinder with and without plasma -->
显示原图|下载原图ZIP|生成PPT 图12施加控制前后时均流线分布 -->Fig.12Time-averaged streamline distribution around a circular cylinder with and without plasma -->
由图11(a)与图12(a)可知,施加激励前,圆柱后缘存在较大面积的分离区,气流在分离区内流速较慢.施加激励后,气流分离得到抑制,圆柱绕流完全再附(如图11(b)与图12(b)). 值得注意的是,对称布局激励器在靠近来流一侧,诱导产生了一个较为明显的涡结构(如图12(b)所示,将该诱导涡命名为C).诱导涡C不断旋转、运动,促进了壁面附近低能气流与外流之间的掺混,抑制了圆柱绕流流场分离,实现了类似于移动附面层控制的效果.与传统移动附面层控制技术相比,基于等离子体气动激励的新型移动附面层控制技术不需要复杂、笨重的机构,不会带来额外的阻力,具有潜在的应用前景.在瞬态流场部分,本文会对诱导涡C进行进一步分析. 另一方面,在激励器诱导流场与来流相互作用下,激励器在圆柱前驻点附近诱导产生了一对涡结构(将该对诱导涡标注为A和B).这一对诱导涡使得圆柱前驻点向上游方向移动,起到了修型的作用,产生了虚拟形变的控制效果[38]. 图13给出了施加激励后,圆柱绕流流场随时间变化情况. 其中$t^\ast(t^\ast=tU_{\infty }/D)$为无量纲时间[27],$U_{\infty}$表示来流速度,$D$表示圆柱直径.从图13可以看出,刚开始激励时,激励器对尾流场改变较小(如图13(a)所示);当$t^\ast=19.8$时,激励器在靠上游一侧产生了明显的凸起,改变了圆柱绕流的流动状态,缩短了尾流宽度(如图13(b)所示);当$t^\ast=36$时,激励器靠上游一侧诱导产生了小尺度涡结构(如图13(c)所示).随着时间的推移,诱导涡的尺度增大,卷吸掺混能力增强,圆柱尾迹区面积大幅缩小,圆柱绕流流场分离得到较好抑制(如图13(d)). 显示原图|下载原图ZIP|生成PPT 图13施加激励后圆柱绕流流场随时间变化情况 -->Fig.13The evolution process of streamline distribution around a circular cylinder with plasma actuation -->
从图14可以看出,随着时间的推移,等离子体气动激励的效果增强,诱导涡的涡核半径逐渐增加;当$t\ge 1.4$ s,涡核半径趋于稳定. 图15给出了无量纲诱导速度随时间变化情况($U_{\rm i}^\ast=U_{\rm i}/U_{\infty})$.由图可知,诱导速度随时间的变化规律与涡核半径随时间的变化规律类似.刚开始激励时,随着时间的增加,诱导涡的诱导速度逐渐提高;当达到一定时间,诱导涡趋于稳定,涡的诱导速度变化较小. 显示原图|下载原图ZIP|生成PPT 图15无量纲诱导速度随时间变化情况 -->Fig.15The non-dimensional induced velocity of vortex with plasma duration -->
4 结 论
(1)静止空气下,对称布局激励器在刚启动瞬间,会在暴露电极两侧诱导产生一对旋转方向相反的启动涡;随着时间的推移,启动涡不断旋转、运动,向远离壁面的方向发展;随后,激励器在暴露电极两侧产生双向射流.在柯恩达效应的作用下,诱导射流朝圆柱壁面发展. (2)当两组对称布局激励器分别布置在圆柱$\pm 90^\ast$位置时,等离子体激励器具有明显的减阻作用;当激励电压峰峰值为19.6kV,激励频率3kHz时,施加等离子体气动激励后,圆柱阻力系数减小了21.8%. (3)通过尾流场测量发现,对称布局等离子体控制能够较好地抑制尾流场中的脱落涡,从而消除了圆柱尾流脉动速度功率谱中的尖峰. (4)在来流情况下,对称布局激励器在靠近来流一侧,诱导产生了较为稳定的涡结构.诱导涡通过旋转、运动,促进了壁面附近低能气流与主流之间的掺混,抑制了圆柱绕流流场分离,实现了"虚拟移动附面层控制"效果.与传统移动附面层控制技术相比,基于等离子体气动激励的新型移动附面层控制技术不需要复杂、笨重的机构,不会带来额外的阻力,具有较强的应用前景. 诱导涡作为新型移动附面层控制技术的核心,影响着控制效果.下一步拟将通过改变激励参数、调整激励器布置位置等方式,进一步控制等离子体激励器诱导涡的尺寸与位置,提升等离子体新型移动附面层控制技术的控制效果,为该技术的工程应用提供支撑. The authors have declared that no competing interests exist.
(WangSai,ShaoChuanping.Suppression of vortex shedding from an oscillating circular cylinder by a splitter plate . Chinese Journal of Theoretical and Applied Mechanics, 2012, 44(4): 787-791 (in Chinese)) [本文引用: 1]
(XieJi,XuJinsong,YuCheng.A flow separation control on cylinder flow . Journal of Harbin Engineering University, 2011, 32(4): 401-406 (in Chinese)) [本文引用: 1]
(ShaoChuanping,WangJianming.Control of circular cylinder wakes at relatively high Reynolds numbers . Chinese Journal of Theoretical and Applied Mechanics, 2006, 38(2): 153-161 (in Chinese)) [本文引用: 1]
(ChenYejun, ShaoChuanping.Suppression of vortex shedding from an oscillating cylinder by base blowing. Scientia Sinica Physica, Mechanica ${\&}$ Astronomica, 2012, 42(4): 406-420 (in Chinese)) [本文引用: 1]
(WangJinjun,FengLihao,XuChaojun. Experimental investigations on separation control and flow structure around a circular cylinder with synthetic jet . Science China Technological Sciences, 2007,37(7): 944~951 (in Chinese)) [本文引用: 1]
(FanChunbao,ZhangHui,ChenZhihua.Adjoint-based optimal control of flow around cylinder . Acta Aerodynamic Sinica, 2007, 25(1): 97-101 (in Chinese)) [本文引用: 1]
(WuYun, ZhangHaideng, YuXianjun.Plasma flow control of axial compressor . Journal of Engineering Thermophysics, 2017, 38(7): 1396-1414 (in Chinese)) [本文引用: 1]
(MengXuanshi, YangZeren, ChenQi, et al.Laminar separation control at low Reynolds numbers using plasma actuator . Acta Aeronoutica et Astronautica Sinica, 2016, 37(7): 2112-2122 (in Chinese))
(FengLihao, WangJinjun, Choi K Experimental investigation on lift increment of a plasma circulation control airfoil . Chinese Journal of Theoretical and Applied Mechanics, 2013,45(6):815-821(in Chinese ))
(ShiZhiwei, DuHai, LiZheng, et al.Mechanism and applications of plasma flow control technology . High Voltage Apparatus, 2017, 53(4): 72-78 (in Chinese)) [本文引用: 1]
(SuChangbing,SongHuimin,LiYinghong.Experiments of the flow field structure control around a circular cylinder based on plasma actuation . Journal of Experiments in Fluid Mechanics, 2006, 20(4): 45-48 (in Chinese)) [本文引用: 1]
(LiGang,LiYiming,NieChaoqun.Experimental investigation on effects of dielectric barrier discharge plasma on flow field in the wake of circular cylinder cross flow. Science ${\&}$ Technology Review, 2008, 26(2): 51-55 (in Chinese))
(LiWenfeng,CaiJinsheng,HaoJiangnan.Flow control on a circular using multi-bipolar plasma actuator . Journal of Experiments in Fluid Mechanics}, 2013, 27(3): 17-22 (in Chinese))
(WangJianming,JiangHailiang,MingXiaojie.Influence of plasma actuation parameters on the flow around a circular cylinder by a wind tunnel experiment . Science Technology and Engineering, 2017, 35(17): 149-155 (in Chinese))
[18]
SungY,KimW,MungalM.Aerodynamic modification of flow over bluff objects by plasma actuation . Experiments in Fluids, 2006, 41(3): 479-486
[19]
ThomasFO,KozlovA,Corke TC.Plasma actuators for cylinder flow control and noise reduction . AIAA Journal, 2008, 46(8): 1921-1931
[20]
KozlovA, ThomasFO. Active noise control of bluff-body flows using dielectric barrier discharge plasma actuators . AIAA Paper 2009-3245, 2009 [本文引用: 1]
(NiuZhongguo, ZhaoGuangyin, LiangHua.A review of studies of vortical flow control over delta wings using DBD plasma actuation . Acta Aeronautica et Astronautica Sinica, 2018, 40: 122201(in Chinese) [本文引用: 1]
(DuHai, ShiZhiwei, GengXi.Experimental study of directional-lateral aerodynamic moment control of micro air vehicle by plasma actuator . Acta Aeronoutica et Astronautica Sinica, 2012, 33(10): 1781-1790 (in Chinese))
(CheXueke, NieWansheng, HouZhiyong, et al.High altitude plasma flow control simulation through ground experiment . Acta Aeronoutica et Astronautica Sinica, 2015, 36(2): 441-448 (in Chinese))
(WeiBiao, LiangHua, NiuZhongguo, et al.Experimental investigation of delta-wing flow control by microsecond pulse plasma actuator . High Voltage Engineering, 2016, 42(3): 782-789 (in Chinese))
(DangWei, LiangHua.Research of post-stall vortex control on airfoil based on nanosecond pulse plasma aerodynamic actuation . High Voltage Apparatus, 2017, 53(12): 74-80 (in Chinese))
(LiangHua, WuYun, LiJun, et al.Test of high lift system flow control by plasma aerodynamic actuation . Acta Aeronoutica et Astronautica Sinica, 2016, 37(8): 2603-2613 (in Chinese))
[27]
FengLH, ChoiKS, WangJJ.Flow control over an airfoil using virtual Gurney flaps . Journal of Fluid Mechanics, 2015, 767: 595-626. [本文引用: 2]
[28]
ZhangX, HuangY, WangXN.Turbulent boundary layer separation control using plasma actuator at Reynolds number 2000000 . Chinese Journal of Aeronautics, 2016, 29(5): 1237-1246 [本文引用: 1]
[29]
ZhangX, LiHX, HuangY.Wing flow separation control using asymmetrical and symmetrical plasma actuator . Journal of Aircraft, 2017, 54(1): 301-309 [本文引用: 1]
[30]
ZhangX, HuangY, WangWB.Unmanned air vehicle flow separation control using dielectric barrier discharge plasma at high wind speed. Science China: Physics, Mechanics ${\&}$ Astronomy, 2014, 57(6): 1160-1168 [本文引用: 1]
(ZhangXin, HuangYong, WangXunnian.Flight testing of flow separation control using plasma actuator . Acta Aeronoutica et Astronautica Sinica, 2018, 39(2) :121587 (in Chinese)) [本文引用: 1]
[32]
WhalleyRD, ChoiKS.The starting vortex in quiescent air induced by dielectric-barrier-discharge plasma . Journal of Fluid Mechanics, 2013, 703: 192-203 [本文引用: 2]
[33]
WangJJ, ChoiKS, FengLH, et al.Recent developments in DBD plasma flow control . Progress in Aerospace Sciences, 2013, 62:52-78
(ZhangXin, HuangYong, YangPengyu, et al.Investigation on the turbulent characteristics of the jet induced by a plasma actuator . Chinese Journal of Theoretical and Applied Mechanics, 2018, 50(4): 776-786 (in Chinese)) [本文引用: 1]
[35]
ZhangPF, LiuAB, WangJJ.Aerodynamic modification of a NACA 0012 aerofoil by trailing-edge plasma Gurney flap . AIAA Journal, 2009, 47(10):2467-2474 [本文引用: 1]
[36]
CorkeTC, EnloeCL, WilkinsonSP.Dielectric Barrier Discharge plasma actuators for flow control . Annual Review of Fluid Mechanics, 2010, 42(1): 505-529 [本文引用: 1]
[37]
LittleJC.High-lift airfoil separation control with dielectric barrier discharge plasma actuators[PhD Thesis] . Columbus: The Ohio State University, 2010 [本文引用: 1]
[38]
WangJJ, FengLH, XuCJ.Experimental investigations on separation control and flow structure around a circular cylinder with synthetic jet . Science in China Series E: Technological Science, 2007, 50(5): 550-559 [本文引用: 1]
[39]
FengLH, WangJJ.Circular cylinder vortex-synchronization control with a synthetic jet positioned at the rear stagnation point . Journal of Fluid Mechanics, 2010, 662:232-259 [本文引用: 1]
(HuangMingqi, WuJie, HeLong.Blade tip vortex characteristics of rotor under hovering status . Journal of Harbin Institute of Technology, 2018, 50(4): 124-129 (in Chinese)) [本文引用: 2]
 , 黄勇
, 黄勇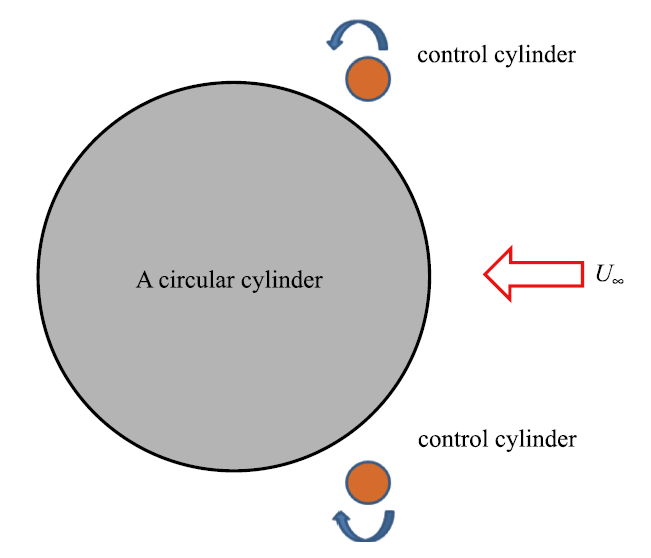 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT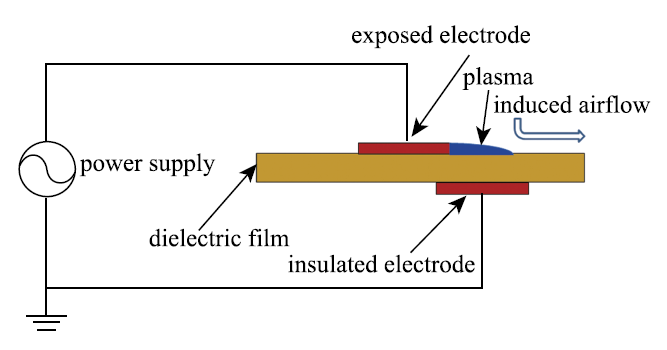 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT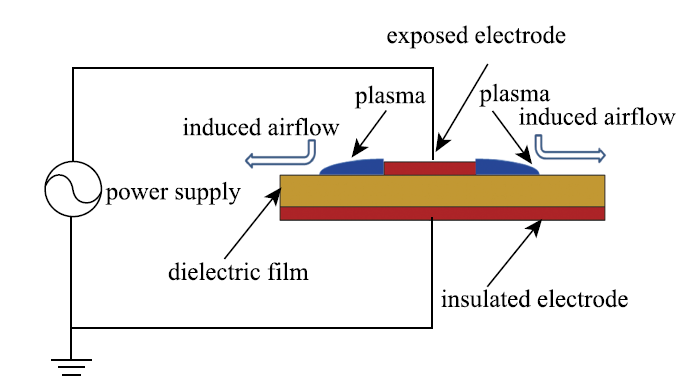 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT
 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT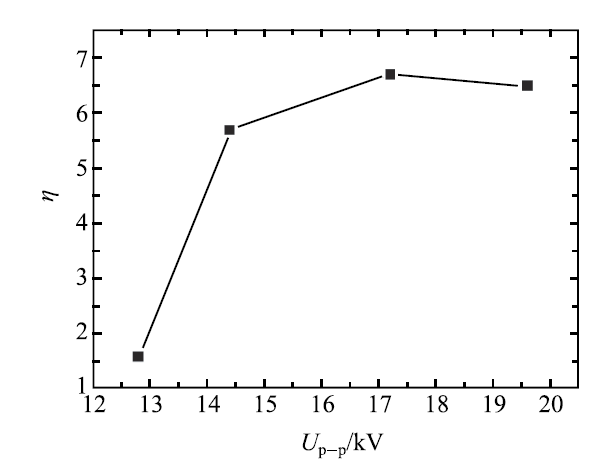 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT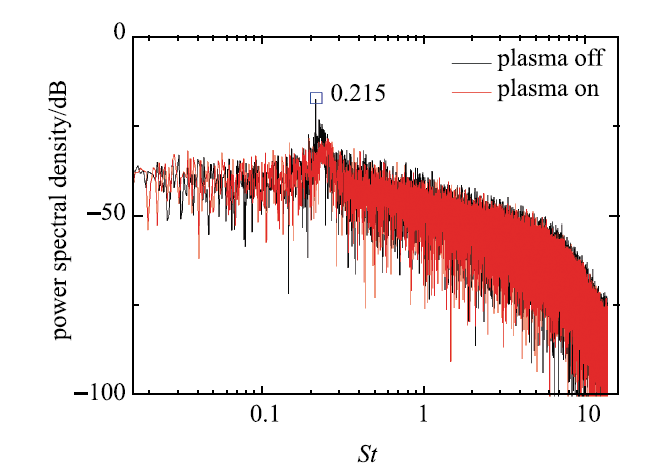 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT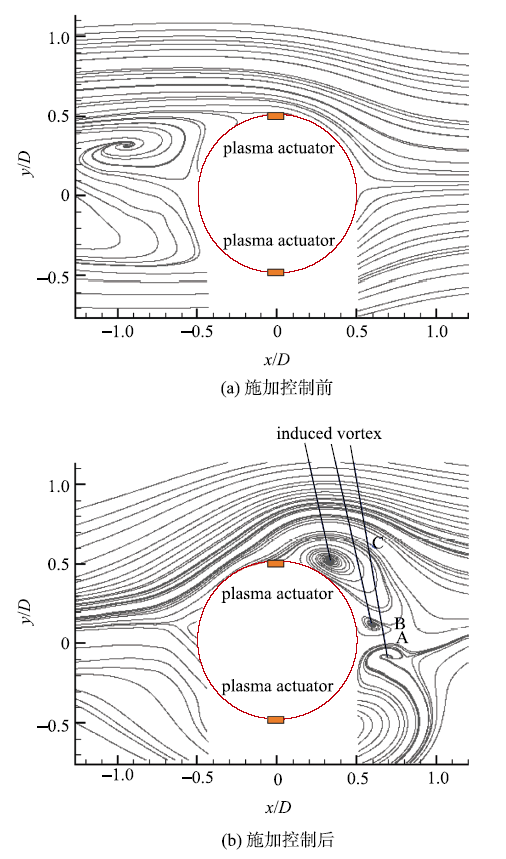 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT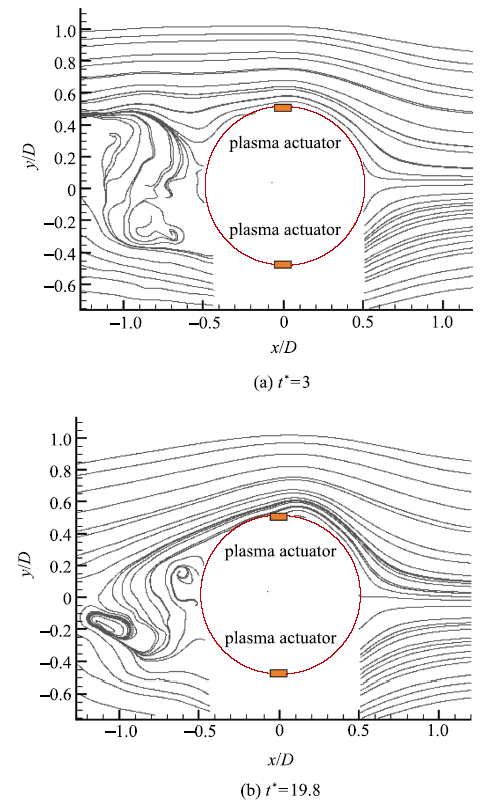 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT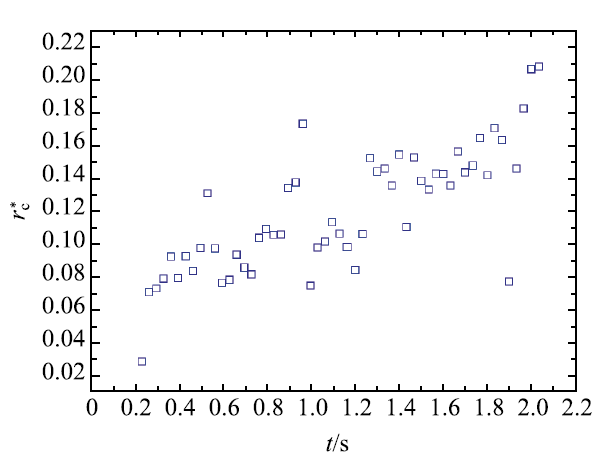 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT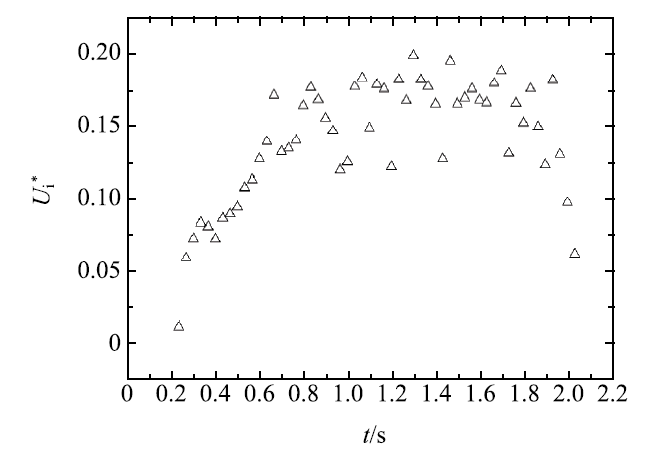 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}