 ,1,4
,1,4Iterative construction of UAV low-altitude air route network in an urbanized region: Theoretical system and technical roadmap
XU Chenchen1,2, YE Huping1, YUE Huanyin1,3,4, TAN Xiang1,4, LIAO Xiaohan,1,4通讯作者:
收稿日期:2019-11-11修回日期:2020-04-20网络出版日期:2020-05-25
| 基金资助: |
Received:2019-11-11Revised:2020-04-20Online:2020-05-25
| Fund supported: |
作者简介 About authors
徐晨晨(1991-),女,安徽人,博士生,主要从事无人机航路规划、无人机遥感等研究E-mail:xucc.14s@igsnrr.ac.cn。

摘要
关键词:
Abstract
Keywords:
PDF (5067KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
徐晨晨, 叶虎平, 岳焕印, 谭翔, 廖小罕. 城镇化区域无人机低空航路网迭代构建的理论体系与技术路径. 地理学报[J], 2020, 75(5): 917-930 doi:10.11821/dlxb202005003
XU Chenchen.
1 引言
随着现代化技术的快速发展,全球民用无人机数量不断增长[1],应用日益多样化[2],无人机及其应用正在逐渐影响甚至改变人类生活[3]。中国目前已经是无人机生产和运行大国,截至2019年7月,中国经实名登记注册的无人机数量已超34万架[4],2019年第二季度的民用无人机经营性飞行活动高达34万h[5]。在无人机数量和商业化飞行时长迅猛增长的背景下,城镇化地区对无人机多样化应用存在大量需求,尤其是在城镇化地区的低空空域。低空(特别是400~500 m以下的空域)是传统航空运行的“荒山荒坡”,而随着无人机的兴起,特别是“低、慢、小”无人机却大量利用这一空域,尤其是城镇化地区对无人机多样化应用(移动监视、物流快递、医疗救助)需求最为突出[6]。据统计,80%以上轻小型无人机活动集中在120 m以下(低空或超低空)。日渐旺盛的无人机飞行需求与紧张的低空空域资源之间的矛盾在城镇化地区日益突出,精细有序管控无人机大势所趋且十分迫切。目前仍然缺乏一种方式可有序规划低空空域资源并被无人机用户接受,提升空域资源利用率和安全性,真正满足日益增长的无人机应用发展需求。这极大地束缚了中国无人机产业的引领性快速发展。相对于中高空的航空器管理,管理部门对低空飞行器的监视和通讯存在一定的技术局限,传统的技术手段(如雷达监视系统)很难捕捉“低、慢、小”无人机。因此,目前各国普遍在无人机运行服务系统(UAV Service System, USS)支撑下,将构建无人机交通管理(Unmanned Aerial System Traffic Management, UTM)系统作为无人机管控的主要手段。目前初具雏形的UTM系统包括以美国国家航空航天局(National Aeronautics and Space Administration, NASA)研制的无人机交通管理(UTM)[7]、欧洲航空安全局(European Aviation Safety Agency, EASA)推出的无人机空域运行管理(U-space)[8]、中国民用航空局(Civil Aviation Administration of China, CAAC)(以下简称民航局)推动的民用无人驾驶航空器运行管理(UOM)[9]三大主流无人机管理体系,以及新加坡针对人群密集市区提出的无人机城市交通管理系统(urban Traffic Management of Unmanned Aircraft System, uTM-UAS)[10]。中国的无人机管控建设工作由民航局牵引,已经开发建设了中国民航局无人驾驶航空器空中交通管理信息服务系统(Unmanned Aircraft System Traffic Management Information Service System, UTMISS),会同一系列无人机云服务系统将进一步构成无人机运行和管理平台(UAV Operation and Management, UOM)。目前经民航局正式批准并且在运行的云系统有10个[11],通过遵循《无人机云系统接口数据规范》[12]规定的无人机云系统之间数据传输、标记、测试与试验要求,可以达到无人机运行状态数据的初步交换和共享状态。尽管如此,城镇化地区地表复杂,禁飞区众多,高楼林立,人口密度大,由于缺乏地理信息和无人机低空航路支撑,现有无人机管控及云服务系统还不能解决低空运行难题,空域和交通管理部门对大量的无人机飞行需求还缺乏有效的服务和管理。全面禁止城镇化地区无人机活动既阻碍先进技术应用,也不能最终解决发展需求问题。如何保障和规范城镇化地区无人机的安全和高效飞行是当前国民经济和社会发展中迫切需要解决的问题。
为了解决无人机的安全和高效飞行难题,各国都在探索技术手段,其中,基于海量地理信息规划无人机低空航路这一技术方案越来越得到认可[13,14]。如中国科学院在2017年提出无人机低空公共航路,构建了理论体系,并得到初步研究成果[15],给出了解决安全和高效问题的选项。与此同时,与当下个人或企业等自用商业化航路规划不同,低空公共航路对所有符合飞行要求的大众用户开放,并通过一定的管控技术与管理手段维持安全、高效的交通流,可以做到“高效”飞行。随着无人机低空航路概念的进一步普及和深化研究,2019年民航局在《关于促进民用无人驾驶航空发展的指导意见》(征求意见稿)中明确提出“重点开展低空无人机公共航线划设和运行研究示范”和“开展低空航路航线规划与构建技术”研究[13],明确了中国发展低空公共航路的未来趋势。此后,杭州迅蚁网络科技有限公司(以下简称迅蚁)获民航局批准在杭州城区开展无人机快递运送试点工作[16],并进行杭州重点示范区的无人机低空物流航路的规划与应用示范[17]。与此同时,国外也纷纷开展无人机低空航路的研究,如NASA提出无人机交通管理走廊概念,在纽约州罗马市和雪城之间建立了北美第一条长约80 km的无人机飞行走廊,并配备雷达和地面传感器用来低空探测和追踪小型无人机,以保证走廊内无人机的安全间隔[18];空客公司联合新加坡民航管理局推出“Skyways”项目,旨在测试无人机在预先定义好的空中廊道中运输包裹的能力[19];南洋理工大学空中交通管理研究所(Air Traffic Management Research Institute)提出基于AirMatri构建航路网络[10],Salleh等提出在建筑物和道路上空构建新加坡城市低空航路网的构想[10]。
可见,无人机低空航路概念正在被广为接受。然而,当前国内外对无人机低空航路的研究集中在“路”的建设,对于“网”的构建研究并不充足,尤其是对于地表复杂、地表信息高动态更新的城镇化区域来讲,如何充分利用城市基础设施和现有的地面交通构建一个安全、高效的无人机低空航路网也未见研究报道。从社会职能来讲,无人机低空航路网与地面路网是相辅相成的。首先,传统地面交通网络体系和无人机航路网都是为了解决货物流动问题,鉴于此,可以参照现有的地面路网走向构建航路网;其次,由于在无人机运输安全性逐步提高的过程中会不可避免地发生一些飞行事故,而现有地面网络及其沿途基础设施又可为无人机运输提供服务(如及时的搜救)。因此,地面路网的支撑使得无人机航路更具实用性。此外,由于无人机飞行对地理信息有着高精度和高动态更新的要求,传统的依靠部门统计报送获取地理信息手段满足不了这一需求,而遥感技术对航路的信息动态提取与深化处理呈现出良好的应用前景。因此,本文阐述了低空航路网的内涵与外延,分析了其多学科交叉特征与理论基础,基于遥感和地理信息等技术手段探索了城市区域低空航路网构建技术路径,并对其发展前景作出分析和展望。
2 城镇化区域航路网迭代构建的理论体系与工作基础
本文从低空复杂环境和无人机与人类活动关系出发,甄别和构建无人机飞行影响要素体系,基于遥感技术快速、精准识别航路敏感地理要素,构建无人机飞行约束要素数据集及地理围栏数据库,构造无人机飞行与航路规划环境,通过路径设计与优化算法迭代形成区域多级航路网。2.1 从基于传统手段规划的全国多级航路到多级迭代新思路构建的区域航路网
无人机航路网的构建与民用航空航线的构建区别较大,民航航线一般位于6000 m以上中高空,几乎不受地面要素约束,其交通网络规划模式是先规划交通枢纽(即机场)再规划航线,着重于交通枢纽建设;而无人机一般在几百米的低空飞行,地面制约要素尺度跨度大、种类多,无人机航路网规划需着重考虑飞行路径建设以及路径与周围地理环境间关系,如无人机航路宽度、航向等参数,以及无人机距离障碍物最近距离等,二者具体区别与联系如表1所示。本团队前期工作——“无人机低空公共航路”利用传统手段构建多级航路,即先进行无人机空港的空间布局和优化配置无人机资源[20],进而通过航路规划算法打通无人机空港之间的联系[21],形成多级航路,并在无人机低空公共航路规划原型系统上展示和构建,实现初步无人机低空交通体系构建、运行与管理[22]。该研究围绕“无人机低空多级航路”进行,侧重“点”和“线”的构建,未涉及“网”构建,即强调“航路”而非“航路网”。然而随着无人机数量和应用的快速扩张,同一时刻运行在同一区域同一高度层的无人机数量必然增加,城市上空会同时存在大量无人机航路,航路之间如何避免交叉冲突,如何有效保障航路间的安全间隔,如何对无人机进行统一管理和调度,这些都需要考虑,而无人机航路网的科学构建可以解决以上问题。Tab. 1
表1
表1民用航空航线网与无人机低空公共航路网对比分析
Tab. 1
| 类型 | 民用航空航线网 | 无人机低空公共航路网 |
|---|---|---|
| 规划范围 | 一般是6000 m以上的中高空空域。 | 低空甚至超低空空域,一般在移动通信信号覆盖高度范围内(300 m [23]),高度随着通信技术发展而增加。 |
| 与地面交通联系 | 不利用地面交通设施,与地面交通无直接联系。 | 基于地面路网生成第I级航路,与地面路网融合度较高。 |
| 地理信息 | 与地表地理信息几乎无关,局部高原地区受地形和恶劣天气影响。 | 考虑的地理约束要素较多,要素尺度跨度大,如地形、建筑物、电力线(杆)、风力发电塔、水域、地面路网、移动通信基站、无人机管控区、大气环境等;数据来源于地理信息调查和无人机遥感地物快速识别和提取技术。 |
| 航路/线设计 | 先构建交通枢纽,再划设航线,最后形成航线网;枢纽间的航线由途径的导航台间连线构成,避开了航空管制区和危险天气易发区。 | 迭代构建:基于地面路网垂直拔高构建第I级航路网;利用正约束地理要素移动构建第II级航路网;规避负约束地理要素构建第III级航路网;经过仿真和实际飞行测试分别构建第IV、V级航路网。 |
| 航路/线更新与时效性 | 时效性长,不轻易更新。 | 由于影响地理要素多且更新快,航路的更新周期较短,时效性也较短,需定期检测冲突航路段并进行局部航路的动态重规划。 |
新窗口打开|下载CSV
本文充分利用交通基础设施,以垂直拔高地面路网作为初始航路网,并结合无人机飞行特点,逐级优化线路及网络结构,构建低空航路网。较之前期工作,本文研究进展与优势如下:① 进一步明确和丰富了地理约束要素数据库构成要素类型,并从遥感技术角度提出高精度地理要素高效获取和动态更新的可行方案;② 从迭代构建的创新角度进行航路网的逐级建设,形成渐进式航路构建路线,相比前期工作,可动态灵活调整航路布局,局部更新地理要素,更为科学、合理;③ 基于地面路网生成第I级航路,使得无人机低空航路可充分利用沿路加油/气站等交通基础设施,与地面交通联系更为紧密,提出了城镇化区域的无人机低空交通管理的综合解决方案。
2.2 基于无人机遥感技术发展论证构建航路地理约束要素集及地理围栏标准库的可行性
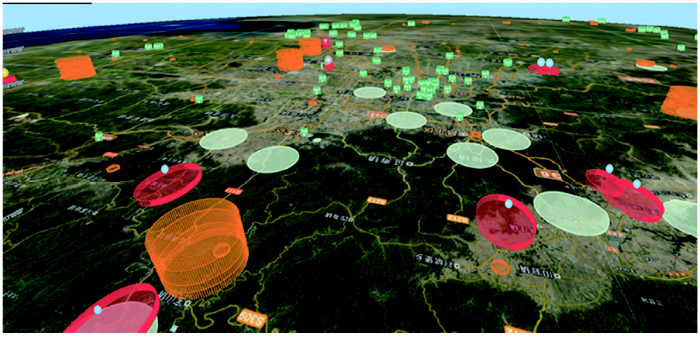
根据地表地理要素对无人机飞行的影响,可以将其分为正、负地理约束要素。正约束地理要素是指无人机在飞行中可利用的地面基础设施,如地面路网及其沿途加油/气站等交通服务设施,以及城市绿地和水域等,其上空域为无人机可利用空间[24];负约束地理要素是指无人机在飞行过程中需避开的“障碍物”,如建筑物、电力线(杆)以及政策限制区等(图1),其上空域及障碍物周边为无人机禁飞空间[25]。正约束地理要素和负约束地理要素共同构成无人机航路的地理约束要素集;地理围栏标准库是在地理要素集基础上,进一步测量和定量计算各要素的影响边界和空间风险等级分布等信息形成的相关标准,可为无人机安全飞行提供参考依据[26]。无人机航路约束地理要素来源广泛、种类众多、尺度不一,再加上有些敏感地理要素更新周期短(如建筑物等),如卫星等传统遥感技术手段难以同时满足高精度和高动态更新要求。随着无人机的兴起和传感器技术的发展,无人机遥感具备灵活性高、不限时间、观测精度高等优势,弥补了传统遥感技术依赖天气和低分辨率的不足[3],因此在摄影测量领域的应用越来越广泛[27],同时无人机组网观测技术[28]的发展更是扩大了高精度影像的获取效率;此外,随着形态学[29]、深度学习[30]等遥感地物提取技术以及各类地物的半自动化/自动化提取模型和算法[31,32]的扩充,快速、精准地提取和更新各地理约束要素也成为可能。因此可以将无人机遥感及其地物提取技术用于快速提取敏感地物信息,也为构建航路地理约束要素集和地理围栏标准库提供了可行途径。图1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图1多地理约束要素构成的无人机低空飞行环境示意图
注:图中圆柱体表示各地理要素的净空边界。
Fig. 1Diagram of low-altitude flight environment of UAVs consisting of multiple geographic constraints (the cylinder in the figure represents the clearance boundary for each geographic element.)
城镇化地区航路网的构建对数据精度要求高,区域范围较小,可以采用多旋翼无人机搭载激光雷达构建无人机遥感观测系统来获取区域三维倾斜影像,并进行遥感影像的质量检查、预处理(几何校正与地理编码等)、检校空三加密、影像拼接等一系列已经相当成熟的图像处理操作[33],为地物提取准备好基础数据。无人机低空飞行的敏感地理要素众多,且光谱和形态等特征均不同,因此不同敏感地物的提取方法不同。为提高地物提取精度,在实际地物提取过程中,可以通过多源、多尺度无人机遥感数据为典型的地理约束要素建立基于无人机遥感影像的地理约束要素标准库,以加大遥感影像中的信息量,通过采用非监督分类、聚类分析等机器学习方法,以及多种指标信息对地物进行分类(如纹理信息、光谱信息等),提高地理约束要素的识别精度。
有人驾驶航空器通过统一调控和驾驶员目视实现避障功能,但“无人机系统”没有统一管控,也不具备视觉功能进行障碍物的探测和避让。为了保证无人机的安全飞行,必须为无人机目视外的运行制定最低间隔标准,以确保它们与所有其它负约束地理要素保持安全距离,避免空中相撞或干扰下界面重要目标。为此,2017年民航局公布《无人机围栏》,将无人机需要避让的地理要素定义为“无人机围栏”,并详细定义了围栏模型的元数据、坐标系、数据结构等要求。特别是为应对频发的无人机扰航事件,民航局规定并公布了民用机场障碍物限制面保护范围数据。这为构建无人机低空运行地理围栏数据库提供了标准规范依据。团队前期工作已将民用机场列为无人机航路负约束要素,参与构建无人机航路规划环境,基于此进行航路规划,形成航路网;根据部分地理约束要素对无人机飞行作用的空间范围构建了净空边界数学模型,界定了要素空间影响范围,并实际测试了移动通信基站信号分布的物理层结构,获取了反映移动通信信号质量和强度的信噪比、参考信号接收功率等参数,构建了通信覆盖模型[34]。下一步工作是构建各地理约束要素的地理围栏评价模型、基于评价模型对多源公共航路约束要素进行网格化叠加计算。按照最终叠加计算结果,设定地理围栏约束系数,构建地理围栏数据库。
3 城镇区域低空航路网多级迭代构建技术路径
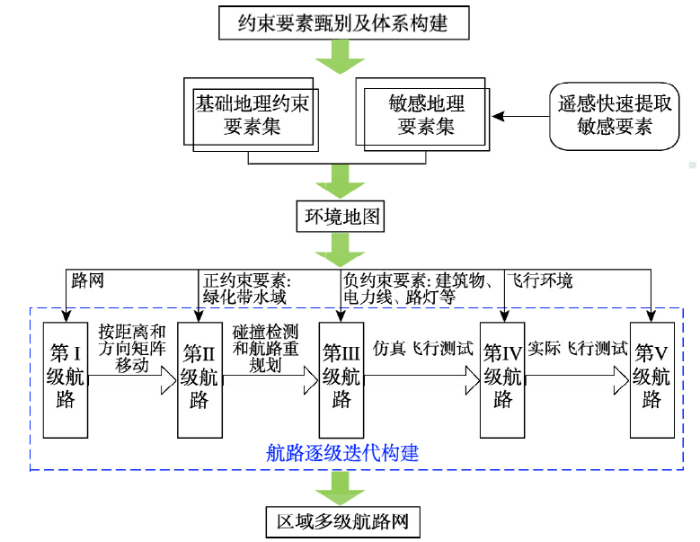
图2是城镇化区域航路网多级迭代构建的技术路径,在构建航路约束要素体系基础上,通过多途径获取基础地理约束要素,并利用遥感技术快速提取敏感要素,构建航路规划环境,进而通过逐级迭代方式构建区域多级航路网。其中,第I、II、III级为航路设计主体,分别在考虑地面路网、可利用地理要素和规避地理要素条件下逐级构建和完善航路网。第II级航路网是在第I级航路网构建结果基础上使得航路接近可利用地理要素,如绿化带,提升无人机航路运行安全性;第III级航路网在第II级航路网结果基础上使得航路规避负约束要素,如建筑物,降低无人机运行碰撞风险。第IV、V级航路为航路设计结果的仿真和实际飞行测试,目的是对前三级迭代构建的航路网进行模拟试验和实际飞行试验。其中,第IV级仿真飞行试验通过计算机模拟无人机在航路内飞行的姿态、运行风险等,与前三级航路迭代结果形成闭环,通过试验结果反馈完善航路网构建结果;第V级实际飞行试验是通过实际调查对真实场景环境和航路网构建结果进一步验证,以确保航路实际运行的安全性。第I~V级航路网迭代构建构成完整的航路构建流程。下面以天津市京津新城区域为例进行具体说明。图2
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图2城镇化区域多级航路网迭代构建技术路线图
Fig. 2Technology roadmap of iterative construction for multi-level air route network in urban areas
3.1 基于地面路网生成第I级航路网
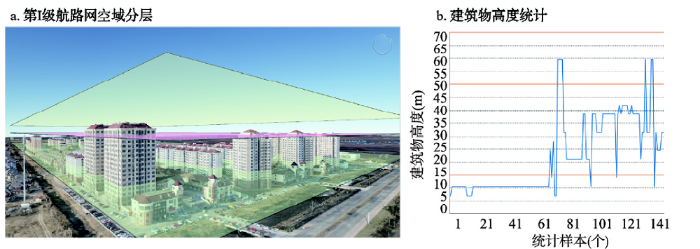
区域低空航路与地面路网间关系密切。首先,无人机货运方向与传统的货运方向具有一致性,均是为了解决货物运输问题,可以参照现有地面路网规划低空航路网;其次,相比地面运输,无人机运输时效较高,可弥补传统运输方式的不足;最后,可依托地面交通网络为无人机提供支撑服务(如搜救)。可以看出,无人机交通与地面交通的融合是发展趋势。因此,本文基于地面路网生成第I级低空航路网。对于道路遥感提取技术,目前较为成熟的是半自动提取方法,然而人机交互提取道路信息方法效率偏低,难以满足快速更新的需要,考虑到深度学习在道路提取中应用的日益发展[35],可应用深度学习理论和技术构建全自动算法进行道路信息高效提取。根据无人机低空交通线路承担的主要交通职能和任务类型等因素,将区域航路分为区域主干航路和社区单元内部航路。区域主干航路又分为承担区域与区域间交通以及区域内部各社区单元主体间的交通联系等两类航路,社区单元内部航路则承担某一小区或校园等有明确边界的功能主体内部航路。为避免各类型航路间干扰和碰撞,对区域低空进行空域分层,以区分不同类型航路的规划高度层。可根据获取的区域无人机遥感影像,提取DSM数据,并结合低空移动通信信号覆盖高度和地表建筑物高度等,将区域低空划分为三个高度层,第一层为社区单元内部航路规划空间,不设高度下限,无人机在此区域内需要规避的障碍物较多,可能包括电线杆、基站塔、建筑物、树木等;第二、三层分为区域间交通航路和社区单元间交通航路规划空间,高度上限为移动通信信号覆盖高度,无人机在此区域内主要规避一些高层建筑。根据空域分层结果将地面路网分类拓展至三维空间,其中区域对外交通航路和主干航路网以及小区单元内部路网位于不同高度规划层,形成I级航路网。以京津新城某小区单元为例,经实际调查统计,该区路灯高度12 m,电线杆高度10 m,树木高度低于15 m,建筑物以居民楼为主,共142幢,高度80%低于50 m(图3)。因此,设置第一个高度层设置为15 m,无人机可避开绝大多数的路灯、电线杆、树木等障碍物;第二个高度层设置为50 m,无人机可以避开基站塔杆和绝大多数的建筑物;第三个高度层设置为70 m,无人机可以避开所有的建筑物,同时又在通信信号覆盖高度范围内(图3)。
图3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图3第I级航路网空域分层示意图和建筑物高度统计图
注:以京津新城某小区单元为例,图b中蓝线为建筑物高度,黄线为空域划分高度层。
Fig. 3Diagram of vertical division of airspace for first-level air route network (a) and chart of building heights (e.g. a residential area in Jingjin New Town. In Figure b, the blue line refers to building height, the yellow line refers to each height level of airspace.)
3.2 利用正约束地理要素生成第II级航路网
考虑到区域具备的市政基础设施,无人机低空飞行可利用的正约束地理要素主要包括城市绿化带、大片水域(尤其是沿地面路网的河流)、道路沿途加油/气站等服务设施。其中,与道路近似平行的城市绿化带和河流是无人机沿路飞行可利用的最佳地面设施(如迅蚁在杭州的示范城市低空物流航路利用河道和绿化带以达到减小地面风险的目的[24]),均可以基于无人机遥感影像,利用深度学习,并结合图像分割算法提取[36,37]。基于绿化带和河流的第II级航路网通过移动或旋转操作得到:首先,基于地物分布,根据绿地、水域与道路的相对位置关系构建移动方向矩阵,根据绿地、水域与道路的实际距离构建移动距离矩阵。其中,移动方向根据绿化带、水域与道路的相对位置沿道路段法线确定,移动距离由道路和绿化带宽度确定。如根据在京津新城做的实际调查,绿化带与道路的相对位置一般有两种,一种是绿化带在路边(图4a),另一种是绿化带在路中间(图4b)。而河流与道路的相对位置较简单,一般位于道路一侧(图4c)。其次,将地面路网简化为由道路中心线构成的网络,并将路段根据中心线斜率变化分割成若干直线段,沿其法线根据方向矩阵和距离矩阵移动,形成新路径。图4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图4实际调查的京津新城道路与绿化带以及河流间相对位置示意图
注:a、b表示绿化带与道路位置关系,绿化带分别位于道路一侧和道路中间;c表示河流与道路位置关系,河流位于道路一侧;其中各分图中的绿化带和河流均用黄线标出。
Fig. 4Diagram of the relative position between the road and the green land and the river ((a) represents that green land is located on either side of road; (b) represents that green land is located in the middle of the road; (c) represents that river is located on either side of the road. Both the green land and river in each figure are marked with yellow lines.)
3.3 规避负约束地理要素生成第III级航路网
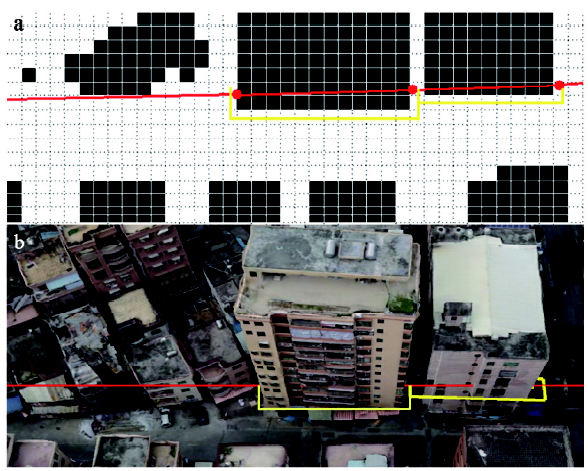
生成基于正约束要素的II级航路网后,无人机在飞行过程中还需规避建筑物、电力线等敏感地理要素,通过检测基于负约束要素集的潜在冲突路段,进行冲突路段的高效重规划构建第III级航路网。其中,建筑物[38]和电力线[39]可以基于无人机LiDAR数据和DTM数据,利用高度信息分类得到建筑物屋顶点云和电力线点云并重建得到。冲突路段检测在栅格环境地图中进行,栅格环境地图由“可飞行区”和“障碍区”构成,由不同属性值的栅格单元表示。航路表示为一系列有序栅格单元的集合,判断该集合元素与“障碍区”的交叉情况即可判断出需重新规划的路段及起止点(图5)。考虑到路径重规划的实时性要求,可采用局部路径动态规划算法进行航路的高效设计与优化。经对比分析,人工势场算法(Artificial Potential Field Algorithm, APFA)是一种相对高效动态的航路规划算法,其效率可达毫秒级别[40]。该方法将无人机的移动方向定义为势场函数下降的方向,而势场函数表达为引力场与斥力场的和。但由于传统算法中引力与无人机和目标点位置距离成正比,当无人机距离目标点较远时,斥力为0,而引力部分过大,可能导致无人机与障碍物相撞;并且,当无人机所受引力与斥力大小相等、方向相反时,无人机所受合力为0,此时无人机易陷入局部极小值,在局部极小值点周围各个位置的合力都指向局部极小值,导致无人机在该点周围振荡,无法自行走出该区域。因此,在实际应用中,需针对以上问题改进,本文初步引入阈值d,当无人机与目标点距离小于等于d时,引力与距离成正比;当无人机与目标点距离大于d时,引力为常数,避免因引力过大导致无人机与障碍物碰撞,阈值d通过多次试验得到;针对局部最优问题,下一步拟引入混沌优化方法,通过优选引力和斥力势场系数组,达到全局渐进收敛,从而跳出局部极小值点等效果[41],即无人机能够挣脱在极小值点附近的振荡,自行走出该区域,从而找到最优路径。
图5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图5冲突航路段检测与重规划示意图
注:a与b分别为同一区域栅格环境地图下和对应真实场景下的航路与建筑物冲突航路段(红线)以及重规划航路段(黄线)
Fig. 5Diagram of collision detection and re-planning of air routes(a and b are the air route that conflicts with buildings (red lines) and re-planned sections (yellow lines) in grid environment map and real scene, respectively.)
图6是第I~III级航路段综合对比示意图,其中,第I级航路段(蓝色实线)位于地面路段上空,经过移动后得到第II级航路段(红色实线),然而由于距离建筑物较近,第II级航路段穿过了建筑物最小外包矩形,即航路存在碰撞风险,经过冲突检测和路径重规划,得到第III级航路段(黄色实线),并经过平滑得到优化后的航路段(黄色虚线)。
图6
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图6第I~III级航路段对比示意图
Fig. 6Diagram of I-III level of air route network(blue solid line: I level of air route section; red solid line: II level of air route section; yellow solid line: III level of air route section; yellow dotted line: improved III level of air route section)
3.4 基于仿真飞行测试验证反馈形成第IV级航路网
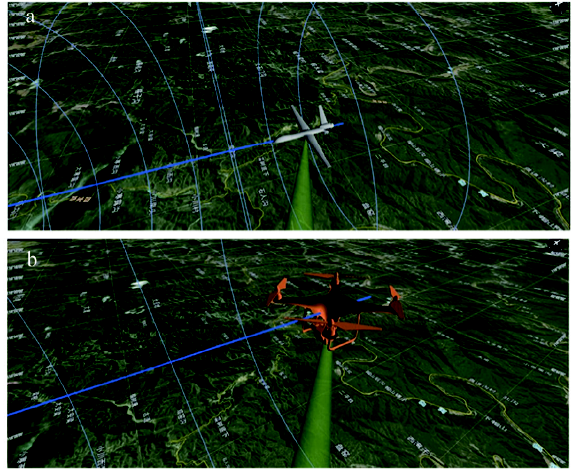
为了验证航路的安全性和科学性,需要对航路构建结果进行仿真飞行测试(图7),生成飞行测试和风险评估报告,将结果反馈至第III级航路网并修正飞行航路生成第IV级航路网。在仿真飞行前,根据无人机真实参数,通过三维建模工具建立等比例无人机三维模型。并利用自由度(Degree of Freedom, DOF)技术,根据无人机真实结构和参数,设置多个DOF节点,包括飞机主体节点和舵面节点,实现无人机三维模型各局部的相互独立运动,以还原出无人机实际姿态,包括爬升、左右盘、下滑等,并模拟出舵面偏转和螺旋桨转动等细节特征,以达到优良的三维模拟效果。为了安全转弯,在无人机减速转弯时,还需同步平滑航路,实现平滑过渡效果。此外,一个好的地形场景与真实环境对三维仿真至关重要,因此多源三维地形融合、可视化及三维重建和三维地图技术至关重要。通过融合倾斜摄影数据与三维地形数据,能为用户提供更加真实、准确的可视化体验,并为仿真模拟提供高精准的三维环境。图7
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图7真实场景下无人机在低空航路内的仿真飞行示意图
注:蓝色弧线表示航路边界,底图为真实地形场景;a为固定翼无人机,b为多旋翼无人机。
Fig. 7Diagram of UAV's simulated flights within low-altitude air routes based in real scene (the blue arc refers to the air route boundary, the base map is the real terrain data, (a) is a fixed-wing UAV and (b) is a multi-rotor UAV)
仿真飞行过程中,实时检测并计算无人机当前位置与周围“障碍物”的碰撞风险以及环境威胁系数,飞行结束后生成仿真飞行测试报告和风险评估报告。仿真飞行测试报告记录无人机在航路内飞行每时刻的姿态(俯仰角、滚转角和航向角等)、速度、侧向偏离等反映无人机飞行状态和舵面稳定的参数,还包括无人机实时位置、航路及飞行任务等参数。风险评估报告包括无人机飞行环境风险(尤其是无人机距离最近障碍物的距离)和无人机之间碰撞风险等。
评估结果分为仿真飞行测试结果和风险评估结果,仿真飞行测试结果反映无人机航路的合理性,通过对比无人机实时位置是否在航路内这一指标衡量。若无人机实时位置在航路内,则航路合理;反之则需要调整修正第III级航路。尤其是在航路转弯处比较复杂,可能有3种原因:① 航路宽度设置过小,此时需要调整航路宽度,并进行冲突检测,如果无冲突,直接生成该宽度下的第IV级航路;如果有冲突,需要重规划冲突路段,再生成第IV级航路;② 无人机最小转弯半径设置过大,此时需要调整该参数,重新平滑优化第III级航路得到第IV级航路;③ 航路在优化时无人机俯仰角设置过大。此时,需要调整俯仰角,重新平滑优化第III级航路得到第IV级航路。换言之,航路宽度、无人机最小转弯半径和俯仰角都有一个阈值,需要科学设置、反复调试才能达到最优仿真飞行测试结果。风险评估结果反映航路与周边环境相对位置的合理性。如果存在较大的环境风险,需要重新设计该段航路的第三级结果,如调整建筑物净空边界范围等;如果存在机间碰撞风险,需要调整第I级航路网间距,通过减少同高度层的航路数目或增加高度分层减少冲突。
3.5 基于实际飞行测试验证反馈形成第V级航路网
为了保障无人机飞行活动的绝对安全,需要通过实际量测进行飞行区域环境的真实性检验和精度校正。重点监测通信链路参数、局部气候环境建模精度以及城市建筑、道路交通、市政基础设施、地形、电网高塔等各种地理信息的准确度等。通过实地调查,采用野外勘测、拍照取景、仪器监测等方式,沿航路测试信号覆盖情况和无人机通信能力、量测航路距障碍物最近距离并形成分析报告。与模拟飞行的场景进行比对,以校验地理信息准确度,在此基础上进行实际飞行测试,得到实际飞行风险评估报告,以评估航路的安全性和可靠性,生成第V级航路网(图8)。在实际飞行时,为了保障居民隐私安全,在小区内航路运行的无人机不应携带任何载荷。图8
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图8城镇化区域无人机低空航路网展望图
注:红线为区域对外交通航路网;黄线为区域内部航路网。
Fig. 8Prospect of UAV low-altitude air route network in urban areas
4 总结与展望
当前低空空域以无人机为利用主体,由于低空环境复杂,尤其是在城镇化区域,无人机的飞行隐患陡增。本文基于遥感和地理信息技术快速、精准提取无人机飞行约束地理要素,在充分利用地面基础设施、安全避开地表障碍物的前提条件下,提出迭代构建城镇化区域多级航路网的理论体系和技术路径,并在梳理了国内外无人机低空航路发展情况的基础上,对比分析并突出本文研究的优势所在,即侧重航路“网”本身建设,基于逐级构建、分层利用的理念充分利用地面基础设施;将遥感技术融入航路构建,充分利用其高动态提取特点来构建精细化航路规划环境。同时,本文从当前有关无人机发展政策、前期工作基础以及无人机低空航路在行业中的实际应用试点等方面论证了上述技术路径的可行性。然而,由于处在探索和初步研究阶段,本文尚存在一些不足,如在构建第I级航路网时未考虑各级航路的连通或中转,同级航路之间也可能存在交叉冲突问题,这些技术细节将在下一步研究中以具体研究区作为应用示范试点的工作中具体考量。此外,无人机低空航路网还需加强与现有无人机政策的关联,在不与国家政策冲突前提下进一步完善。从资源角度看,低空空域资源的精细化开发和利用是地理学与资源科学发展的需求和前沿,而无人机低空公共航路是一种能充分释放中国需求强烈但稀缺的低空空域资源,促进低空空域经济与无人机产业协调高速发展的高效解决方案。因此无人机低空公共航路开拓了低空空域资源的开发和利用领域,拓展了地理学研究的外延,同时又将地理学研究领域从地表延展到低空,具有明晰的科学远景和发展前景。随着无人机低空公共航路理论体系的不断完善和实际应用的深化,必将有力促进地理学科的发展。另外,低空的多学科领域属性决定了基于多学科交叉解决无人机的低空应用是发展趋势,而无人机低空公共航路既是地理科学与航空科学相结合的重要产物,又是继无人机遥感应用之后,无人机在地理学应用的又一大突破,必然对地理学有深远影响。
参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
[本文引用: 1]
[本文引用: 1]
[本文引用: 2]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
[本文引用: 1]
URL [本文引用: 1]
[本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
[本文引用: 3]
[本文引用: 1]
[本文引用: 1]
.
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 2]
URL [本文引用: 2]
URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 1]
URL [本文引用: 2]
URL [本文引用: 2]
URL [本文引用: 1]
URL [本文引用: 1]
MH/T 2008-2017.
URL [本文引用: 1]
URL [本文引用: 1]
DOI:10.1016/j.isprsjprs.2014.02.013URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}