 ,1, 张骁1, 王文辉1, 郑恒彪1, 姚霞1,2, 朱艳1, 曹卫星1, 程涛,1,2
,1, 张骁1, 王文辉1, 郑恒彪1, 姚霞1,2, 朱艳1, 曹卫星1, 程涛,1,2Assessment of Terrestrial Laser Scanning and Hyperspectral Remote Sensing for the Estimation of Rice Grain Yield
LI PengLei,1, ZHANG Xiao1, WANG WenHui1, ZHENG HengBiao1, YAO Xia1,2, ZHU Yan1, CAO WeiXing1, CHENG Tao,1,2通讯作者:
责任编辑: 杨鑫浩
收稿日期:2020-09-1接受日期:2020-11-20
| 基金资助: |
Received:2020-09-1Accepted:2020-11-20
作者简介 About authors
李朋磊,E-mail:

摘要
关键词:
Abstract
Keywords:
PDF (2500KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
李朋磊, 张骁, 王文辉, 郑恒彪, 姚霞, 朱艳, 曹卫星, 程涛. 基于高光谱和激光雷达遥感的水稻产量监测研究[J]. 中国农业科学, 2021, 54(14): 2965-2976 doi:10.3864/j.issn.0578-1752.2021.14.004
LI PengLei, ZHANG Xiao, WANG WenHui, ZHENG HengBiao, YAO Xia, ZHU Yan, CAO WeiXing, CHENG Tao.
开放科学(资源服务)标识码(OSID):

0 引言
【研究意义】水稻是当前中国最主要的粮食作物,也是世界上主要的粮食作物之一[1,2],其产量与国家甚至全世界的粮食安全密切相关,水稻产量的估算对保障农业可持续发展至关重要[3,4]。实时、准确的地面遥感技术已成为农作物长势及产量监测等农业研究的重要手段[5,6],同时可为国家粮食安全战略的制定提供参考依据[7,8]。【前人研究进展】近年来,激光雷达作为一种新兴的遥感技术手段[9],在全天候作物生长监测中发挥着巨大优势[10,11]。从激光雷达数据中能够获取作物结构参数,例如高度特征变量、体积等[11,12],进而准确估算作物生物量[13,14],然而还很少用于作物产量估算。由于作物生物量与籽粒产量密切相关,部分****尝试利用高度数据估算作物产量,结果发现中等分辨率的全球定位系统高程数据由于精度较差,无法代替由激光雷达技术获取的点云来估算作物产量[15]。相比定位导航高程数据,无人机激光雷达可以获取精度相对较高的点云数据。有****尝试利用无人机激光雷达来监测作物长势,但是由于激光点云稀疏且激光点云误差较大,导致估算结果并不理想[16]。利用高光谱遥感估算作物产量,一直是精确农业研究的热点,相关****利用关键生育期的植被指数与产量建立回归关系[17]。有****还综合环境因子与植被指数来进行作物产量监测[18],都得到了较为准确的估算结果。还有****从产量要素亩穗数、穗粒数、千粒重的形成过程出发,在综合考虑产量形成生理机制的基础上,建立了较为可靠的基于植被指数的产量估算模型[19]。作为信号处理领域最有效且常用的方法之一,连续小波变换具有对光谱信号进行多尺度分析的优势,对高光谱数据进行连续小波变换,可以高效提取不同宽度光谱区间的形状信息[20]。因此,小波变换在遥感监测领域发挥着重要的作用。很多****基于小波变换得到的小波特征进行农学参数反演发现,相比植被指数,小波特征能够进一步提高作物生理生化参数的监测精度[21,22],有助于叶面积、产量等重要农学参数的估算。【本研究切入点】目前,大部分作物估产研究多基于孕穗期等关键生育期或者孕穗—抽穗期等多生育期复合的光谱数据来估算作物产量[23],忽视了关键生育期光谱数据缺失时高光谱遥感技术的表现,很少关注抽穗后光谱数据的产量估算性能。作为一种农业应用中使用较多的遥感手段,其水稻产量估算性能与新兴的激光雷达技术相比如何,目前还未见详细报道。【拟解决的关键问题】本研究使用地基激光扫描仪获取高精度、高密度的点云数据,依此来监测水稻产量,明确抽穗后不同时期2种遥感手段的产量估算精度差异,评价不同统计学方法在产量估算建模中的表现,并利用多年多生态点数据集评价产量估算模型的可移植性。1 材料与方法
1.1 试验地点与设计
试验分别于2016年在江苏省如皋市试验基地,2017年和2018年在江苏省兴化市万亩高产高效粮食产业园进行(图1)。其中,如皋试验包含3个氮梯度,分别为0(N0)、100 kg N·hm-2(N1)和200 kg N·hm-2(N2);2个水稻品种为武运粳24与Y两优1号;播栽方式为旱育秧人工移栽;3次重复。连续2年在兴化进行的水稻互作试验,2年的施氮量设置和品种相同;4个氮肥梯度分别为0(N0)、135 kg·hm-2(N1)、270 kg·hm-2(N2)和405 kg·hm-2(N3);2个水稻品种分别是南粳9108和甬优2640。2017年水稻试验包含3种水稻播栽方式,分别是机械直播、钵苗移栽和毯苗移栽。如皋市(120°33′E,32°23′N)和兴化市(119°3′E,33°05′N)都属于四季分明的亚热带季风气候。同时,如皋试验和兴化试验在土壤特性、主栽品种以及播栽方式等方面的差异对水稻生长产生较大的影响,这对探索普适性强的产量模型具有重要的指导意义。图1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图1研究区地理位置
Fig. 1Geographic location of the experimental sites
1.2 数据获取
本研究所获取的数据包括地面激光雷达数据、冠层高光谱数据与水稻籽粒产量数据3个部分。田间测试及取样的时期包括水稻抽穗期、灌浆前期与灌浆后期。使用的激光扫描设备是RIEGL VZ-1000,在取样当天无风或风速较小的时间段进行激光雷达扫描。2016和2017年的扫描模式为60模式,即角分辨率为0.06°;为获取更精细的水稻冠层结构信息,2018年扫描模式为40模式,即角分辨率为0.04°。2016年如皋试验采用10站点扫描方式;由于小区面积的增加, 2017年和2018年兴化试验均采用21站点扫描方式,具体扫描点的设置情况如图2—3所示。使用的高光谱测试仪是ASD FieldSpec Pro FR 2500便携式高光谱分析仪,在无风、晴朗的中午,当地时间10:00—14:00范围内获取光谱数据。产量是在成熟期通过破坏性取样获得,在成熟期,每个田块设定2个取样点,在每取样点取1 m2,3次重复,从中割取穗子进行脱粒,测量产量构成要素穗数、穗粒数和千粒重,计算得到每个小区的产量。图2
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图22016年如皋试验小区设置及激光雷达扫描点分布图
氮水平:N0(0),N1(100 kg·hm-2),N2(200 kg·hm-2);品种:V1(武运粳24),V2(Y两优1号)
Fig. 2The design of experimental plots and distribution of terrestrial laser scanning positions of Rugao in 2016
N rates: N0 (0), N1 (100 kg·hm-2), N2 (200 kg·hm-2); Varieties: V1 (Wuyunjing 24), V2 (Y Liangyou 1)
图3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图32017年兴化试验小区设置及激光雷达扫描点分布图
氮水平:N0(0),N1(135 kg·hm-2),N2(270 kg·hm-2),N3(405 kg·hm-2);品种:V1(南粳9108),V2(甬优2640);播栽方式:P1(直播),P2(钵苗移栽),P3(毯苗移栽)
Fig. 3The experimental plots and distribution of terrestrial laser scanning positions of Xinghua in 2017
N rates: N0 (0), N1 (135 kg·hm-2), N2 (270 kg·hm-2), N3 (405 kg·hm-2); Varieties: V1 (Nanjing 9108), V2 (Yongyou 2640); Planting techniques: P1 (Direct seeding), P2 (Tray seeding transplanting), P3 (Blanket seeding transplanting)
1.3 特征参数
1.3.1 高光谱数据 基于作物的光谱特性,将多个光谱波段进行线性和非线性组合来构建各种植被指数,能够简单、有效地预测作物产量,本研究归纳了常用的与产量预测相关的植被指数(表1)。Table 1
表1
表1估算水稻产量的常用植被指数
Table 1
| 指数 Vegetation index | 计算公式 Equation | 文献 Reference |
|---|---|---|
| 差值Deviation | ||
| DVI [1200,680] | R1200-R680 | [9] |
| DVI [1200,440] | R1200-R440 | [9] |
| DVI [800,550] | R800-R550 | [9] |
| 比值Ratio | ||
| SR [609,518] | (R609/R518)-1 | [24] |
| SR [1971,2018] | (R1971/R2018)-1 | [25] |
| SR [750,673] | R750/R673 | [26] |
| 归一化Normalization | ||
| NDVI [1200,550] | (R1200-R550)/(R1200+R550) | [27] |
| NDVI[800,680] | (R800-R680)/(R800+R680) | [28] |
| NDVI [608,518] | (R609-R518)/(R609+R518) | [29] |
新窗口打开|下载CSV
连续小波变换的原理是通过平移和缩放母小波函数,与光谱数据进行卷积运算得到小波特征,这些小波特征就可以用于估算产量,连续小波变换的具体公式如下[20]:
式中,ψ(λ)表示母小波函数,ψa,b(λ)表示平移与缩放后的母小波函数,a表示缩放因子;b表示平移因子,Wf (a,b)表示小波特征。本研究利用连续小波变换对所获取的水稻冠层反射率进行处理,将冠层反射率光谱变换到尺度23、24、25和26,得到对产量敏感的小波特征。
1.3.2 激光雷达数据 对获取的点云数据进行插值生成数字表面模型,从数字表面模型中减去数字高程模型得到该时期的冠层高度模型,从中提取多个结构参数(表2)。
Table 2
表2
表2基于冠层高度模型提取的特征变量
Table 2
| 结构参数 Structural parameter | 描述 Description |
|---|---|
| Height mean ( Hmean) | 高度平均值 Mean of height |
| Height min (Hmin) | 高度最小值 Minimum of height |
| Height max (Hmax) | 高度最大值 Maximum of height |
| Height standard deviation (Hstd) | 高度标准偏差 Standard deviation of height |
| Height coefficient of variation (Hcov) | 高度变异系数 Variable coefficient of height |
| Height kurtosis (Hk) | 高度峰度 Kurtosis of height |
| Height skewness (Hs) | 高度偏度 Skewness of height |
| Height percentile (H1st, H5th, H10th, H25th, H50th, H75th, H95th, H99th) | 高度1st, 5th, 10th, 25th, 50th, 75th, 95th, 和99th 百分位 Percent of 1st, 5th, 10th, 25th, 50th, 75th, 95th, and 99th height |
新窗口打开|下载CSV
1.4 回归方法
本研究以2017年兴化数据集训练模型,以2016年如皋数据集和2018年兴化数据集验证模型,各数据集的具体描述见表3。所有的统计分析在Python 3.50软件中进行,画图使用了GraphPad Prism 5.0软件(GraphPad Software,San Diego,CA,USA)。Table 3
表3
表3数据集描述
Table 3
| 数据集 Dataset | 年份 Year | 试验地点 Site | 样本数 Number of samples | 品种 Variety | 播栽方式 Planting technique |
|---|---|---|---|---|---|
| 训练数据集 Training dataset | 2017 | 兴化Xinghua | 72 | 南粳9108 & 甬优2640 Nanjing 9108 & Yongyou 2640 | 钵苗移栽Tray seeding transplanting、 毯苗移栽Blanket seeding transplanting、 直播Direct seeding |
| 验证数据集1 Validation dataset 1 | 2016 | 如皋Rugao | 36 | 武运粳24 & Y两优1号 Wuyunjing 24 & Y Liangyou 1 | 旱育秧人工移栽 Dried-seedling manual transplanting |
| 验证数据集2 Validation dataset 2 | 2018 | 兴化Xinghua | 48 | 南粳9108 & 甬优2640 Nanjing 9108 & Yongyou 2640 | 钵苗移栽Tray seedling transplanting、 毯苗移栽Blanket seeding transplanting |
新窗口打开|下载CSV
1.4.1 线性回归 线性回归依据最小二乘法对自变量和因变量建模,该方法运用十分广泛。其公式定义为:
式中,Y表示n×1的矩阵的列向量,即因变量;X1表示n×1个矩阵的列向量,即自变量;A表示回归系数,ε表示误差。在获取植被指数、小波系数与结构参数后,建立3种特征与产量指标的线性关系,进而筛选各变量中最优指标进行籽粒产量估算。
1.4.2 随机森林回归 随机森林(RF)算法[29]是基于统计学习理论,利用Bootstrap重抽样方法从原始样本中抽取多个样本,对每个Bootstrap样本构建决策树,然后将决策树中出现最好的结果作为最终预测结果,是基于决策树分类器的融合算法。在光谱数据分析的基础上,本研究将获取的最优尺度下的小波特征与产量参数进行相关分析,分析小波特征对产量参数的敏感性,提取排名前1%的小波特征参与随机森林的模型训练。而激光雷达数据的分析则是将所有提取的结构参数用于随机森林的模型训练。
2 结果
2.1 基于光谱及点云数据的产量估算模型构建
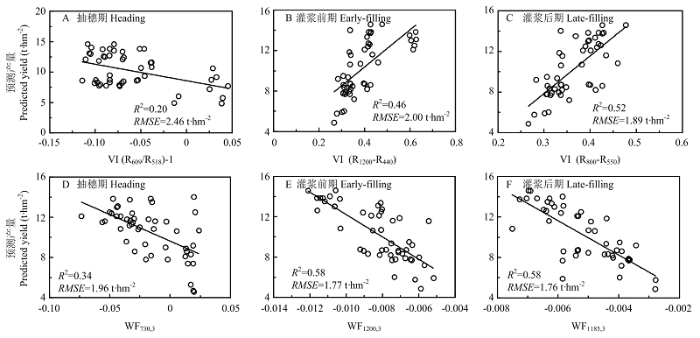
2.1.1 光谱估算模型 通过系统分析常用植被指数与水稻产量的相关性发现(表4),(R609/R518)-1、R1200-R440、R800-R550分别为抽穗期、灌浆前期与灌浆后期植被指数系列中表现最好的指数,这3种植被指数均与产量显著相关(P<0.001)。不同时期对应的最优植被指数与水稻产量的R2变化范围为0.20—0.52(P<0.001)。Table 4
表4
表4水稻产量与已有植被指数的相关性
Table 4
| 植被指数 Vegetation index | 抽穗期 Heading | 灌浆前期 Early filling | 灌浆后期 Late filling |
|---|---|---|---|
| R1200-R680 | 0.12* | 0.41** | 0.23** |
| R1200-R440 | 0.10* | 0.46** | 0.24** |
| R800-R550 | 0.17** | 0.41** | 0.52** |
| (R609/R518)-1 | 0.20** | ns | 0.01 |
| R750/R673 | 0.16** | 0.29** | 0.27** |
| (R1971/R2018)-1 | 0.03 | 0.04 | 0.02 |
| (R1200-R550)/(R1200+R550) | 0.17** | 0.31** | 0.28** |
| (R800-R680)/(R800+R680) | 0.12** | 0.32** | 0.23** |
| (R609-R518)/(R609+R518) | 0.16** | ns | 0.01 |
新窗口打开|下载CSV
不同时期对产量敏感的最优小波特征分布在不同位置,在抽穗期、灌浆前期、灌浆后期,对产量敏感的小波特征分别分布在730 nm、1 200 nm、1 185 nm的波段,不同尺度的敏感小波特征较为稳定;其中尺度3监测精度最高,故本研究后续分析基于尺度23的小波特征进行处理(表5)。
Table 5
表5
表5水稻产量与小波特征的相关性
Table 5
| 抽穗期 Heading | 灌浆前期 Early filling | 灌浆后期 Late filing | |
|---|---|---|---|
| 最优小波特征 Optimal wavelet feature | WF730,3 | WF1200,3 | WF1185,3 |
| R2 | 0.34** | 0.58** | 0.58** |
新窗口打开|下载CSV
抽穗期、灌浆前期与灌浆后期的最优植被指数及敏感小波特征分别与产量的相关性如图4所示。结果表明,所有时期小波特征与产量的相关性(R2 = 0.34—0.58)均优于同时期的植被指数与产量的相关性(R2 = 0.20—0.52)。
图4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图4最优植被指数(A、B、C)及最优小波特征(D、E、F)水稻产量的回归关系
Fig. 4Relationships of optimal spectral features with rice yield (vegetation indices: A, B, C; wavelet features: D, E, F)
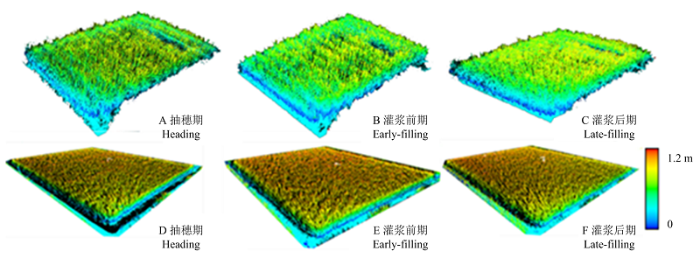
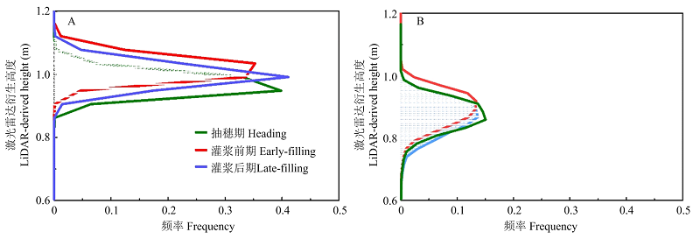
2.1.2 激光雷达估算模型 兴化试验区水稻高于如皋试验区水稻(图5),且同一研究区在不同生育期获取的点云数据差异不大,植株结构信息较为稳定(图6)。LI等[30]发现H95th与水稻器官生物量和地上部生物量表现出明显的相关性,故本研究同样使用H95th作为水稻产量估算的特征参数。以兴化某小区的数据为例,阐述H95th的详细含义(图7)。H95th指高度直方图中的95百分位点,相比极高值与最大值,H95th 不容易受到环境干扰;相比极低值与最小值,H95th又包含足够的上部冠层信息,更能真实反映植株的结构信息。
图5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图5如皋某小区抽穗后(A、B、C)与兴化某小区抽穗后各生育期(D、E、F)的水稻点云数据,颜色依据高度赋值
Fig. 5Three-dimensional view of the point cloud data collected by the TLS instrument for a rice plot at post-heading stages in Rugao (A, B, C) and Xinghua (D, E, F). The data points are color coded by height relative to the soil background in the plot
图6
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图6兴化(A)与如皋(B)某小区的高度直方图
Fig. 6The height histogram of a rice plot in Xinghua (A) and Rugao (B)
图7
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图7结构参数Hmin、H1st、H95th、H99th、Hmax在高度直方图中的分布
Fig. 7The distribution of structural metrics Hmin、H1st、H95th、H99th、Hmax in height histogram
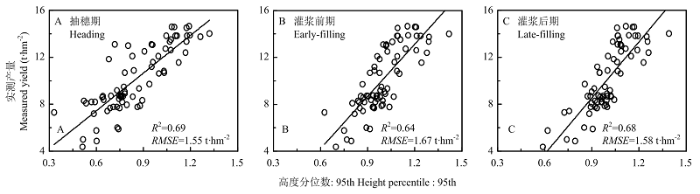
通过系统分析H95th与水稻产量的相关性(图8),发现抽穗后各生育期H95th均与水稻产量具有较高的相关性(R2 = 0.64—0.69),且在抽穗后所有时期结构参数H95th与产量的相关性,均优于同时期敏感小波特征(R2 = 0.34—0.58)和最优植被指数(R2 = 0.20—0.52)与产量的相关性。
图8
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图8结构参数在与水稻产量的回归关系
Fig. 8Relationships between structural parameters and rice yield
2.2 光谱估算模型评价
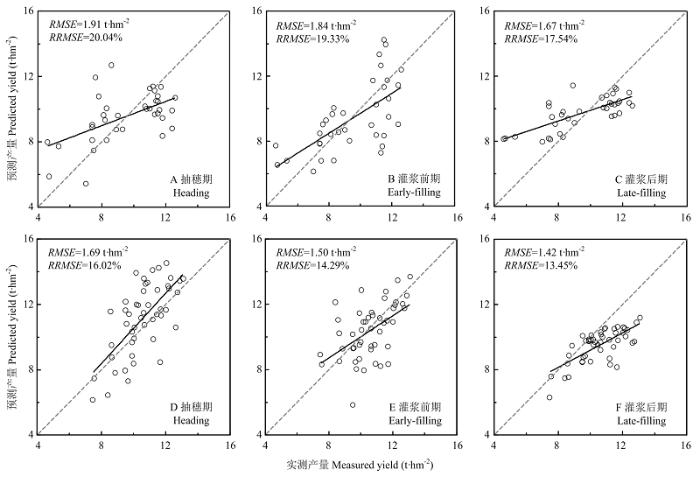
对比不同数据集的检验结果发现,基于植被指数的线性估算模型(M1)在如皋数据集的验证精度(RRMSE = 20.01%—31.17%),低于在兴化数据集的验证精度(RRMSE = 16.14%—19.31%)。对比M1与M2发现,即线性的产量模型验证效果更准确(表6)。基于小波特征的产量模型验证精度变化规律与基于植被指数的产量模型一致(图9)。Table 6
表6
表6光谱数据产量模型应用于不同数据集得到的RMSE与RRMSE值
Table 6
| 模型 Models | 如皋Rugao | 兴化Xinghua | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 抽穗期Heading | 灌浆前期Early filling | 灌浆后期Late filling | 抽穗期Heading | 灌浆前期Early filling | 灌浆后期Late filling | |||||||
| RMSE | RRMSE | RMSE | RRMSE | RMSE | RRMSE | RMSE | RRMSE | RMSE | RRMSE | RMSE | RRMSE | |
| M11 (VI & LR) | 2.97 | 31.70 | 2.01 | 21.05 | 1.91 | 20.01 | 1.84 | 17.45 | 1.70 | 16.14 | 2.04 | 19.31 |
| M2 (VI & RF) | 3.07 | 32.20 | 2.18 | 22.90 | 2.16 | 22.65 | 2.14 | 20.30 | 3.04 | 28.84 | 2.25 | 21.30 |
| M3 (WF & LR) | 1.91 | 20.04 | 1.84 | 19.33 | 1.67 | 17.54 | 1.69 | 16.02 | 1.50 | 14.29 | 1.42 | 13.45 |
| M4 (WF & RF) | 3.04 | 31.92 | 2.37 | 24.88 | 2.10 | 21.10 | 2.11 | 20.00 | 2.05 | 19.42 | 1.93 | 18.29 |
新窗口打开|下载CSV
图9
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图9基于小波特征的线性估算模型在如皋(A、B、C)以及兴化(D、E、F)数据集的验证结果
Fig. 9The scatter plots of measured and predicted yield of rice with the optimal wavelet feature at different growth stages for the datasets collected in Rugao (A, B, C)and Xinghua (D, E, F)
2.3 激光雷达估算模型评价
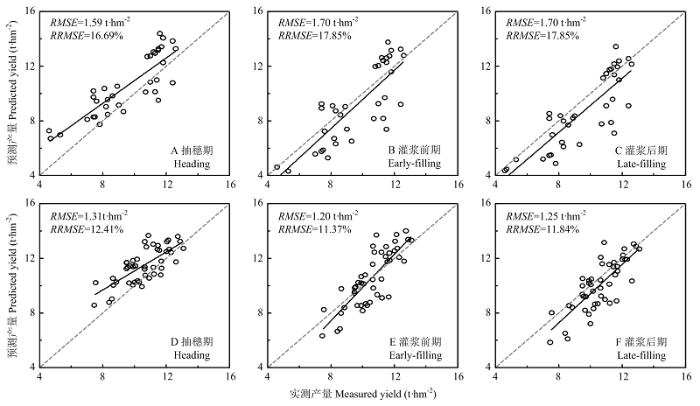
2.3.1 线性回归 对比点云数据模型在不同数据集的检验结果发现,产量模型在兴化数据集的验证精度(RRMSE=11.37 %—12.41%),明显优于模型在如皋数据集的验证精度(RRMSE= 16.69%—17.85%)(图10)。总体上,基于结构参数的线性估算模型明显优于基于小波特征的线性产量模型。图10
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图10基于结构参数的线性估算模型在如皋(A、B、C)以及兴化(D、E、F)的验证结果
Fig. 10The scatter plots of measured and predicted yield of rice with TLS-derived height variable (H95th) at different growth stages in Rugao (A, B, C) and Xinghua (D, E, F)
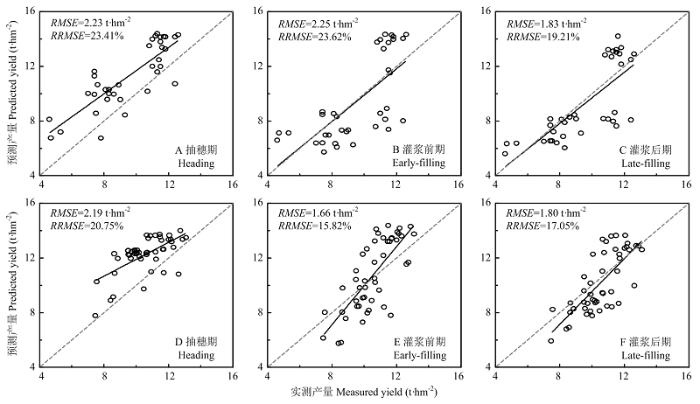
2.3.2 随机森林回归 对比基于结构参数的随机森林估算模型在不同独立数据集的检验结果发现,产量模型在兴化数据集的验证精度(RRMSE=15.82%—20.75%),优于模型在如皋数据集的验证精度(RRMSE=19.21%—23.62%)(图11)。对比基于结构参数的估算模型验证结果发现,基于结构参数的线性估算模型验证精度(RRMSE=11.37%—17.85%),优于随机森林估算模型的验证精度(RRMSE=15.82%—23.62%)。
图11
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图11基于结构参数的随机森林估算模型在如皋(A、B、C)以及兴化(D、E、F)的验证结果
Fig. 11The scatter plots of measured and predicted yield of rice from the structural metrics with random forest regression in Rugao (A, B, C) and Xinghua (D, E, F)
3 讨论
3.1 激光雷达技术监测产量的优势
在本研究中,植被指数以及小波特征与产量相关性均低于结构参数与产量的相关性,这与预期结果一致。作物所处的生长环境和生化参数(叶绿素、干物质和含水量)影响着作物个体的生长过程和作物的产量[31]。水稻内部所含的多种色素、植株水分以及其结构控制着水稻特殊的光谱响应[32]。水稻在生长发育的不同阶段,其内部的结构成分到外部的形态均衡发生一系列变化,因而在不同的生育期选用的光谱指标不同。点云数据可以更准确地估算水稻产量,原因归结于以下2个方面:一是激光雷达技术可以准确地获取作物的三维结构信息,与产量等生物物理参数有很高的相关性[33]。二是在抽穗后,激光雷达获取到的各生育期的点云数据差异不明显(图6),因而不同生育期模型较为一致,这使得模型更容易推广,降低了预测滞后性。此外,本研究也比较了不同生育期的激光雷达估算模型,发现分蘖期、拔节期与孕穗期的产量估算RMSE分别为2.03、1.87和1.72 t·hm-2。与本文结果相比,抽穗后各生育期的产量估算精度更高。尽管光谱与空间维度信息的结合可能有助于提高估产精度,但考虑到技术成本和实用性,目前还是集中在单独使用一种技术,而且如何进行高效融合以显著提高估算精度也值得深入研究,未来在成本更低的情况下可考虑两类信息的融合。图12
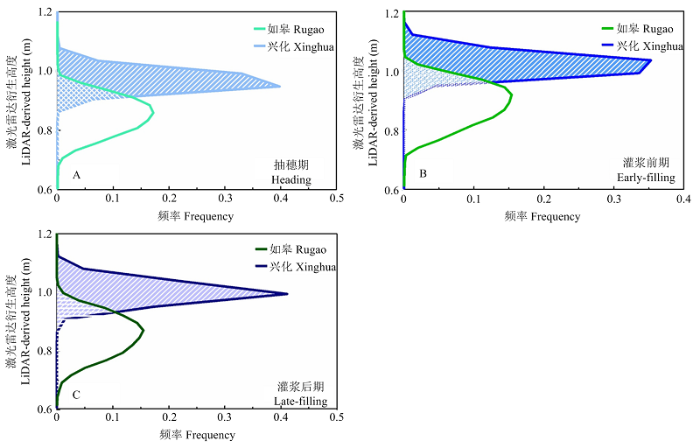 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图12如皋与兴化某小区抽穗后各生育期的高度直方图
Fig. 12Height histogram for an example plot at different growth stages in Rugao and Xinghua
3.2 不同条件下的模型可移植性
本研究结果表明,光谱数据的产量模型在如皋数据集的可移植性较差,这是因为光谱数据容易受到多种因素的影响[34]。本研究在2个生态点进行数据获取,2个生态点在土壤特性、施氮梯度、水稻品种等存在较大差异,这些背景信息会产生光谱叠加,反映在光谱信号中影响数据质量,因而降低了模型的可移植性。基于点云数据的线性估算模型在兴化数据集的验证精度(RRMSE = 11.37%—12.41%),明显高于如皋数据集的验证精度(RRMSE = 16.79%—17.85%),这是因为兴化生态点的品种一致,而如皋小区的水稻植株明显低于兴化小区的水稻植株。同时,如皋与兴化小区在布点方案与种植密度方面存在较大差异,致使激光穿透水稻植株的深度不同,进一步影响了模型精度(图2—3),所以基于点云数据的线性估算模型在兴化数据集的验证精度更高。
3.3 2种回归方法的比较
基于线性回归与随机森林回归的产量模型的验证结果显示,线性的产量模型验证精度明显优于随机森林产量模型的验证精度,这与部分研究结果不一致[35]。在本研究中基于随机森林回归的产量模型验证精度较低,可能是以下2个方面的原因导致的。一方面,过多的输入特征使得运行效率降低而且增加了过拟合的风险,同时少数有效特征的作用也会被掩盖在许多无用特征之下[36]。另一方面,随机森林的回归模型在数据样本不均衡、有效样本较少等情况下难以应用。本研究使用的是独立数据集来评价模型的验证精度,不同数据集间存在差异导致随机森林的产量模型验证精度相对较低,这与部分证明激光雷达技术结合线性回归的生物量模型可移植性强的研究结果类似[37]。4 结论
本研究以如皋试验和兴化试验为基础,同步获取点云数据与光谱数据,开展了抽穗后各生育期的水稻光谱数据与点云数据和产量的时空变异特征研究。研究结果表明,基于点云数据的产量模型估算精度,优于基于光谱数据的产量估算模型;线性回归的产量模型较随机森林回归的产量模型更稳定;产量模型在同一生态点的可移植性优于不同生态点的可移植性。激光雷达技术可以在抽穗后直至收获前对产量进行全天候实时监测,该研究结果可以为精确收获和粮食收购政策制定等提供有益的技术支撑。参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
DOI:10.1007/s11356-018-04074-1URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.rse.2010.01.004URL [本文引用: 1]
DOI:10.1016/j.jag.2012.03.012URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.ecss.2018.02.027URL [本文引用: 4]
DOI:10.1016/j.fcr.2014.01.008URL [本文引用: 1]
DOI:10.5194/isprsannals-II-5-W2-295-2013URL [本文引用: 2]
DOI:10.3390/rs70911449URL [本文引用: 1]
[本文引用: 1]
DOI:10.1080/01431160512331299270URL [本文引用: 1]
DOI:10.1016/j.compag.2010.08.011URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.isprsjprs.2013.10.009URL [本文引用: 2]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[D].
[本文引用: 1]
[D].
[本文引用: 1]
[D].
[本文引用: 1]
[D].
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/0034-4257(91)90029-6URL [本文引用: 1]
DOI:10.1016/S1671-2927(07)60067-4URL [本文引用: 2]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/S0034-4257(02)00056-1URL [本文引用: 1]
DOI:10.1142/S1793545816500371URL [本文引用: 1]
DOI:10.1080/01431161.2011.558130URL [本文引用: 1]
DOI:10.1016/j.isprsjprs.2015.05.007URL [本文引用: 1]
[本文引用: 1]
DOI:10.3390/agriculture5030538URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}