 ,1, 官海翔1, 杨昊轩1, 邵帅1, 邵逸群3, 刘焕军,1,2
,1, 官海翔1, 杨昊轩1, 邵帅1, 邵逸群3, 刘焕军,1,2A New Method to Improve the Accuracy of Digital Elevation Model in Northeast China by Using Terrain, Soil and Crop Information
MA YuYang,1, GUAN HaiXiang1, YANG HaoXuan1, SHAO Shuai1, SHAO YiQun3, LIU HuanJun,1,2通讯作者:
责任编辑: 李云霞
收稿日期:2020-07-2接受日期:2020-08-28网络出版日期:2021-04-16
| 基金资助: |
Received:2020-07-2Accepted:2020-08-28Online:2021-04-16
作者简介 About authors
马雨阳,E-mail:

摘要
关键词:
Abstract
Keywords:
PDF (2248KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
马雨阳, 官海翔, 杨昊轩, 邵帅, 邵逸群, 刘焕军. 利用地形、土壤和作物信息辅助提高东北漫岗地数字高程模型精度的新方法[J]. 中国农业科学, 2021, 54(8): 1715-1727 doi:10.3864/j.issn.0578-1752.2021.08.011
MA YuYang, GUAN HaiXiang, YANG HaoXuan, SHAO Shuai, SHAO YiQun, LIU HuanJun.
开放科学(资源服务)标识码(OSID):

0 引言
【研究意义】航天飞机雷达地形测绘任务(Shuttle Radar Topography Mission,SRTM)是一个免费向公众开放的DEM。然而,众所周知SRTM具有较大的垂直误差[1]。SRTM DEM精度的提升将大大增加公共数据的价值,在精细农业等领域的研究中将产生更高的可靠性。例如,在精准农业的应用关系到世界的粮食安全。研究表明由于地形影响生物量、有机质和土壤类型的空间分布,进而影响作物产量[2,3]。地形因子通常基于数字高程模型(DEM)提取,其精度很大程度上取决于DEM的分辨率[4,5]。因此,选择合适的方法提高耕地区域SRTM DEM的精度对耕地的利用与保护具有重要意义。【前人研究进展】目前,陆地表面DEM数据获取方法主要包括野外地面测量、地形图数字化、航空航天摄影测量与遥感、合成孔径雷达干涉测量等[6,7]。以上方法由于受观测面积、精度和效率、获取成本、数据量等限制,并没有大范围应用于农业领域。虽然大多数国家/地区可以公开获取低精度的DEM,例如,NASA的航天飞机雷达地形图任务(SRTM)。但是只有少数国家/地区利用航空LIDAR测定了国土高精度DEM,对于中国等很多发展中国家,农田范围的高精度DEM还严重缺失[8]。近些年来,利用遥感数据集公开获取的DEM产品生成改进的高质量DEM的方法可分为两类:一是将两种不同质量的DEM进行融合生成改进的高质量DEM,例如,对光学立体像对(Cartosat-1)和InSAR对(ALOS PALSAR-1)采用特征水平融合和卡尔曼最优插值技术对这些离散元进行同化,生成改进的高质量DEM[9];AJIBOLA等[10]将低质量DEM与多旋翼无人机生产的高质量DEM进行融合提高DEM的质量。以上方法虽然提升了DEM的精度,但是忽略了DEM数据在不同空间尺度上的不同特点,使用的DEM和同化方法使改进的高精度DEM存在不稳定性。二是以低质量DEM与光学遥感影像为数据基础,采用神经网络方法改进低精度DEM。例如,在SRTM数据中引入分辨率为30 m的多光谱图像(Landsat 8),利用人工神经网络(ANN)来发挥其在模式识别方面的优势,结合WorldView-1的立体成像与广泛的地面测量点,将森林附近(7 km2)的海拔误差降低了50%得到高精度DEM[11];KULP等将植被覆盖指数、邻域海拔高度值、人口密度、土地坡度以及与ICESat海拔高度观测值有关的局部SRTM偏差为输入量,使用激光雷达数据作为实际地面数据对多层感知器人工神经网络进行训练,提高了SRTM的垂直精度[8]。实现了森林密集区、城市开发区以及沿海区域SRTM DEM的改进。因此结合与耕地区域地形密切相关的变量,有望提高耕地范围的SRTM DEM,满足农业生产等不同领域的需求。在耕作区,作物长势的时空变化受水、热和地表植被覆盖类型3个主导因子的影响[12],同时地形又是影响许多环境变量(水、热、太阳辐射)的关键因素[13],因此地形与植被指数关系密切[14]。土壤含水量是气候、土壤、地形和植被之间关系的联系变量。研究表明地形变化导致土壤含水量的重新分配,土壤含水量的空间变化反映地形属性的空间分布[15]。在非生长季节,地形属性对土壤含水量变化的影响更大[16]。地形不但影响含水量的空间分布,在局部尺度上地形是影响地表太阳辐射分布的最重要因素[17]。在平坦区域,运用遥感影像插值产生的太阳辐射与地形相关性较高,在复杂的地形区域,引入DEM可以避免地面测量的必要性提升太阳辐射预测精度[18]。【本研究切入点】尽管在不同的区域选择与地形密切相关的输入量,可提高SRTM DEM的精度,但是,在耕地范围内的SRTM DEM的改进并没有明确的方法,是需要进一步研究的问题。【拟解决的关键问题】本文以海伦东兴农机合作社的地形为研究对象,探究地形对地表物质的影响,挖掘对地形具有重要影响的变量,分析环境协变量(归一化湿度指数(NDMI)、归一化植被指数(NDVI)、土壤亮度(TCB)、潜在太阳辐射(PSR)等)用于建立高精度的DEM的可行性,对比不同神经网络改进SRTM的精度,以期获得耕地范围更高精度的DEM,为快速获取耕地范围内高精度DEM提供参考。1 材料与方法
1.1 研究区概况
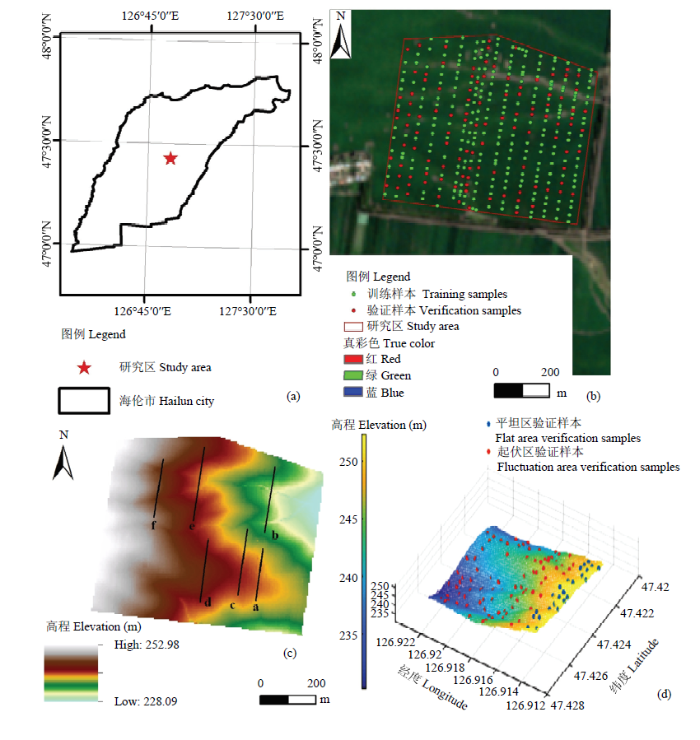
研究区海伦东兴农机合作社位于黑龙江省绥化市东北部,地处松嫩平原东北端,小兴安岭西麓,属于漫川漫岗地带,西高东低,由南向北地貌起伏较大,平均海拔239 m。寒温带大陆气候,四季分明,全年平均降水量在400—600 mm,年活动积温2 200—2 400℃。当前主要以大豆高粱轮作为主,一年一熟制,连片耕作,2016年作物类型为大豆。研究区面积约为43.02 hm2,地块中心经纬度为47°25′28′′N、126°55′30′′E。研究区为典型黑土区,因为黑土区的典型土壤类型在“中国土壤发生分类”中也被直接定义为“黑土”,在“世界土壤资源参考基地”中也被称为黑土[19]。海伦东兴农机合作社属于农场是使用机械进行大规模农业生产的一定规模的企业单位,采用统一的管理措施。从研究角度出发,人为因素的影响均一,可忽略不计。但是不同地形特征下作物长势仍存在明显差异,为探究地形对地表物质分配的影响,在研究区选择地势起伏明显,且历年长势差异大的地块,沿垄向从南至北提取a、b、c、d、e、f(图1)6个断面,分析不同断面的NDMI、TCB、太阳辐射与地形的走势,分析对作物生长的影响。结合坡向、坡度根据研究区的实际位置划分坡顶、阴坡、阳坡、坡底。
图1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图1研究区空间位置图
Fig. 1Spatial location map of the study area
1.2 地形数据获取与处理
地形数据采集于2016年5月27日,使用定位精度为厘米级,水平精度为2 cm,垂直精度为3 cm的海星达iRTK2对研究区进行实地测量,实测的363个精确坐标和高程点作为训练与验证数据集(表1)。在美国地质勘探局网站(Table 1
表1
表1实测高程描述性统计量
Table 1
| 样本 Sample | 差值 Difference | 最小值Min | 最大值Max | 均值Mean | 标准差Std |
|---|---|---|---|---|---|
| N=363 | 22.10 | 230.33 | 252.43 | 242.02 | 5.39 |
新窗口打开|下载CSV
1.3 参与评价的DEM数据采集与处理
1.3.1 光学立体影像数据(ZY-3) 资源三号(ZY-3) 数据为2018年5月12日获取的1C级数据,地理范围在E126°31' 11"—127°23' 25",N47°6' 20"—47°25' 26"之间。数据质量较好,没有云、雪等覆盖,纹理信息和几何结构清晰,覆盖整个实验区,重叠度接近100%的前、后视影像各1景。对ZY-3的前、后影像分别进行辐射校正和几何精纠正,对影像进行色彩拉伸、影像增强等处理,以提高其可解译程度。基于地面控制点和连接点进行DEM提取,生成以卫星地势面WGS 84基准面为基准的5 m分辨率ZY-3 DEM数据。如表6经地面高程点验证,ZY-3 DEM的RMSE为3.69 m作为对比评价的DEM。1.3.2 无人机DEM数据 采用大疆600M Pro六旋翼式飞行器作为遥感平台,搭载 MicaSense RedEdge TM3多光谱相机。数据采集时间为2018年4月15日,天气晴朗无云,风速小于1级,适合飞行,飞行高度为110 m,实际高度109.5 m,图像的空间分辨率为0.074 m。实测部分高程点,作为生成无人机地形的地面控制点,筛选后的图像和POS数据输入Pix4D mapper软件中,根据相机的配置调整处理参数自动生成连接点并与 POS 数据参与空三运算,由此得到每一张航拍影像的准确外方位元素和加密点的坐标。经点云加密后自动生成数字表面模型,以此作为数字微分纠正的依据对影像进行正射校正。由于是裸土时期影像,默认数字表面模型即为数字高程模型,经验证UAV DEM的RMSE为0.10 m(表6)。
由于我国高程基准是1985 国家高程基准, 而SRTM DEM采用EGM96高程基准,高程基准不同会导致高程测量值产生垂直偏差。故将EGMP6转换为我国的高程基准,完成投影转换、水平校正和垂直校正后与实测高程点进行精度验证。
1.4 土壤样本采集与处理
为研究地形与太阳辐射、含水量、土壤有机质的关系,2016年4月21日经过GPS定位,兼顾研究区地形特点均匀采集82个土壤样点。室内将土壤称量后研磨、风干,最后用重铬酸钾测量有机质含量[21]。为研究不同地形特征土壤含水量分布差异,用土钻取0—20 cm土层的土样,一部分用于测有机质,一部分测土壤含水量。将测定土壤含水量的土样装入铝盒称湿土质量,随后放置在烘箱内,在105 ℃下烘干8 h,称重得到最终的干土质量,运用湿土质量减去干土质量的差值除以干土质量,最终得到土壤含水量。
1.5 卫星多光谱遥感数据采集与预处理
由于7月是大豆生长期,所以编程订购2016-07- 09,空间分辨率为6 m的多光谱波段的SPOT-6 影像。在ENVI5.1中进行辐射定标、大气校正处理,在Arsgis10.2中进行裁剪,计算归一化植被指数(normalized difference vegetation index,NDVI)。研究表明地形对非生长季节的水分影响更大[13]。研究区域的农作物每年成熟一次,因此选择2016年5月25日重访周期短,波段数目多的哨兵-2A影像。Sentinel-2A遥感影像是通过几何校正处理的L1C大气顶部反射率数据,利用欧洲航天局(欧洲航天局,ESA)提供的SNAP软件对影像进行大气校正(大气校正的结果,它将反射率数据扩展了10 000倍),然后提取归一化水体指数(normalized differential moisture index,NDMI)。缨帽变换(Kauth-Thomas transformation,K-T) 是一种特殊的主成分分析(principal component analysis,PCA),用于光谱数据的压缩,同时具有最小的信息损失。压缩后的前3个成分分别表示湿度(Tasseled Cap Wetness,TCW),绿度(Tasseled Cap Greenness,TCG),亮度(Tasseled Cap Brightness,TCB)[22],改进SRTM的预选变量如表2所示。
Table 2
表2
表2改进SRTM的预选变量
Table 2
| 变量 Variable | 描述 Description | 数据源 Source |
|---|---|---|
| 归一化植被指数 NDVI | (NIR-RED)/(NIR+RED) | SPOT-6 |
| 绿度 TCG | -0.2848×B2-0.2435×B3-0.5436×B4+0.7243×B8+0.0840×B11-0.1800×B12 | Sentinel-2A |
| 亮度 TCB | 0.3037×B2+0.2793×B3+0.4743×B4+0.2285×B8+0.5082×B11+0.1863×B12 | Sentinel-2A |
| 湿度TCW | 0.1509×B2+0.1973×B3+0.3279×B4+0.3406×B8+0.7112×B11+0.4572×B12 | Sentinel-2A |
| 归一化湿度指数NDMI | (B3-B11)/(B3+B11) | Sentinel-2A |
| 潜在太阳辐射 PSR | 根据地形和仰视半球视域范围算法得到 According to the terrain and looking up hemisphere field of view algorithm | SRTM |
| SRTM | 通过航天飞机雷达地形测绘任务获得的30 m高分辨率的地形数据 30 m high-resolution terrain data obtained through SRTM | SRTM |
新窗口打开|下载CSV
1.6 方差膨胀因子
为排除因子的多重共线性,达到模型最优的反演精度,引入由Marquardt于1960年提出的方差膨胀因子(variance inflation factor,VIF)作为评价指标[23],衡量多元线性回归模型中(多重)共线性严重程度的一种度量。当 0<VIF<10,不存在多重共线性;当 10≤VIF<100,存在较强的多重共线性;当 VIF≥100,存在严重多重共线性。1.7 灰色关联分析
灰色关联分析是通过灰色关联度进行分析和确定,因素之间或因素对主系统的贡献测度的一种方法,核心思想是根据序列曲线几何形状的相似程度判断其联系是否紧密[24]。该研究利用灰色关联度衡量各因素对改进的SRTM DEM的重要程度。灰色关联度>70%为重要因素,50%<灰色关联度<70%为较为重要因素,灰色关联度<50%为不重要因素。2 改进SRTM DEM的方法
通过筛选后使用NDVI、NDMI、TCB、SRTM、PSR作为改进SRTM的输入量(3.3节),将363个实测高程样本按照7﹕3的比例进行训练与验证,保证训练数据集、验证数据集涵盖所有高程值范围。分别使用BP神经网络、ELM神经网络方法进行改进SRTM DEM。2.1 反向传播神经网络
反向传播神经网络(back propagation neural network,BPNN)是一种多层前馈神经网络,由输入层、隐含层和输出层组成,网络的主要特点是信号向前方传递,误差反向传播[25]。信号在向前传递中,信息从输入层到达隐含层逐层处理,直至输出层。每一层的神经元只影响下一层神经元状态。若输出层得不到预期输出,则转为反向传播,从而根据预测误差调整网络权值和阈值,使得预测的结果不断的逼近期望,可以设置误差小于某一特定值或达到一定迭代次数时,停止迭代,网络训练完成[26]。在建立BPNN预测模型时,选择Trainlm作为训练函数,选择Tansigmoid和pureliln作为隐藏层和输出层的传递函数;经过多次训练,隐含层和输出层的节点个数分别为20和1。神经网络算法通过建立和加强输入和输出数据之间的联系来模拟人类的学习过程。它以生物神经系统中的数据处理为基础,因为有许多细胞用于接收信息,一些细胞用于转发和存储,另一组细胞用于向外释放信息。BP神经网络的选择具有以下几个原因。首先,神经网络在改进SRTM DEM方面取得了成功。其次,当数据集的输入和输出参数之间的关系非常复杂时,BPNN提供了良好的建模能力。最后,BPNN虽然被认为是“黑匣子”模型,但是具有很强的非线性拟合能力,所以在建模的系统上提取信息比其他方法更容易[27]。
2.2 极限学习机
极限学习机(extreme learning machine,ELM)是一种新型高性能单隐层前馈神经网络,其算法思想是网络训练前设置合适的隐藏层神经元个数[28]。ELM运行时对输入权值和隐层神经元阈值随机赋值,对数据训练的整个过程不经过迭代而一次性产生唯一的最优解,降低了计算量和搜索空间。ELM克服了人工神经网络训练速率慢、易陷入局部最优及对学习不敏感等不足,提高了算法学习速度以及泛化能力,具有较强的非线性拟合能力[29]。2.3 模型验证
本文以决定系数(R2)和均方根误差(RMSE)和偏率(Bias)作为评价指标[11]。其中R2用于评估模型的稳定性,表示自变量对于因变量的解释程度,取值范围在0—1之间,值越接近1,模型的稳定性越强。RMSE用于评估模型的精度,值越低精度越高,Bias估计高程的实际值与真实值之间的偏离程度,Bias越接近1越逼近实际高程。3 结果
3.1 潜在太阳辐射总量、归一化湿度指数、土壤亮度与地形关系
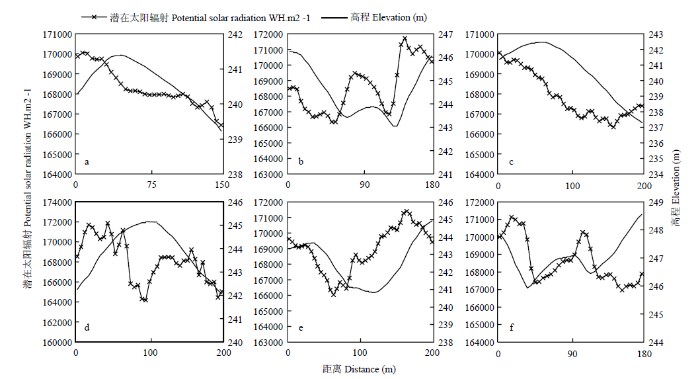
潜在太阳辐射反映不同时间、不同地形特征所接收的太阳热量。图1显示了提取的a、b、c、d、e、f、6个断面的空间位置。图2-a、2-b、2-c、2-f中潜在太阳辐射随高程的降低呈下降趋势;但是在图2-d中,在地势高处,太阳辐射总量反而偏低,在图2-d中,在地势低处,太阳辐射总量反而呈现较高的趋势,可能是受阴坡或阳坡影响导致太阳辐射量偏低或偏高。结果表明潜在太阳辐射不仅与高程相关,而且与地形的空间特征存在关联,所以引入潜在太阳辐射,旨在反映部分地貌空间特征。图2
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图2潜在太阳辐射与高程关系
a、b、c、d、e、f分别代表
Fig. 2Relationship between potential solar radiation and elevation
a, b, c, d, e, and f represent the six sections of figure 1, respectively. The same as
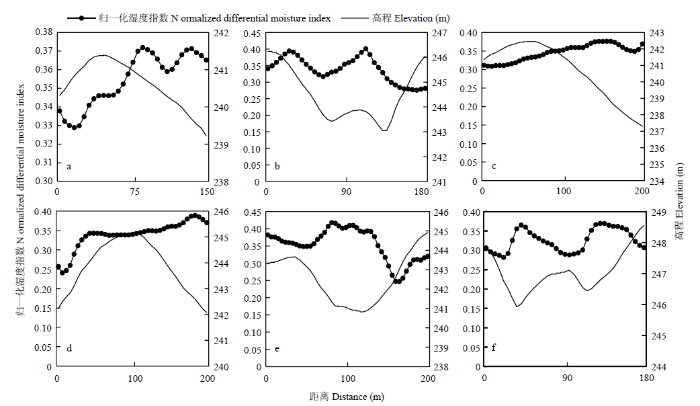
如表3,阴坡土壤含水量均值是0.252 cm·cm-3,阳坡土壤含水量均值是0.229 cm·cm-3。阴坡位置的土壤含水量明显高于阳坡。如图3所示NDMI随着高程的升高逐渐降低,表4中NDMI与高程的相关系数为-0.93**,呈现显著的负相关趋势,所以NDMI作为获得高精度DEM的输入量。此外,NDMI与土壤含水量具有高相关性[30],该研究区土壤含水量与NDMI皮尔森相关系数为0.447**,NDMI反映部分土壤含水量信息。
Table 3
表3
表3阴坡、阳坡土壤含水量描述性统计量
Table 3
| 差值 Difference | 最小值Min | 最大值Max | 均值Mean | 标准差Std | |
|---|---|---|---|---|---|
| 阴坡Sunny slope | 0.0627 | 0.228 | 0.290 | 0.252 | 0.018 |
| 阳坡Shady slope | 0.0626 | 0.211 | 0.274 | 0.229 | 0.144 |
新窗口打开|下载CSV
图3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图3归一化湿度指数与高程关系
Fig. 3Relationship between normalized humidity index and elevation
Table 4
表4
表4实测高程与变量的相关性统计
Table 4
| 高程 Elevation | 归一化湿度指数 NDMI | 归一化植被指数 NDVI | 亮度 TCB | 潜在太阳辐射 PSR | 航天飞机雷达地形测绘任务SRTM | |
|---|---|---|---|---|---|---|
| 高程Elevation | -0.93** | 0.32** | 0.29** | 0.26* | 0.99** | |
| 归一化湿度指数NDMI | -0.30** | -0.24** | -0.25** | -0.93** | ||
| 归一化植被指数NDVI | 0.06 | 0.05 | 0.31** | |||
| 亮度TCB | 0.97** | 0.28** | ||||
| 潜在太阳辐射PSR | 0.26** | |||||
| SRTM |
新窗口打开|下载CSV
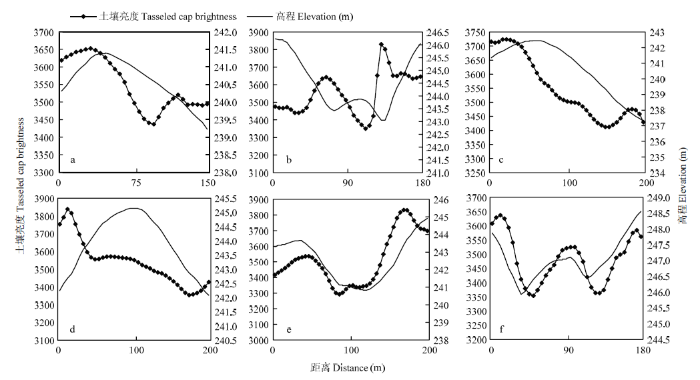
已有研究利用缨帽变换结果进行土壤制图,精度达到0.94[31]。本文亮度(TCB)与有机质实测采样点的皮尔森相关系数是-0.437**,TCB反映部分土壤有机质的信息,其中TCB的值越大土壤有机质含量可能越低。如图4所示TCB与高程具有协同变化的趋势,在不同的坡型中,TCB的值不同。但是图4-b TCB与高程的趋势相反,主要是由于b断面低洼处为两条明显的侵蚀沟(图1),所以TCB值高,并且TCB与高程的显著性水平达到0.01,故作为改进SRTM的输入量。
图4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图4亮度与高程的关系
Fig. 4The relationship between tasseled cap brightness and elevation
3.2 NDVI在不同地形特征的变化
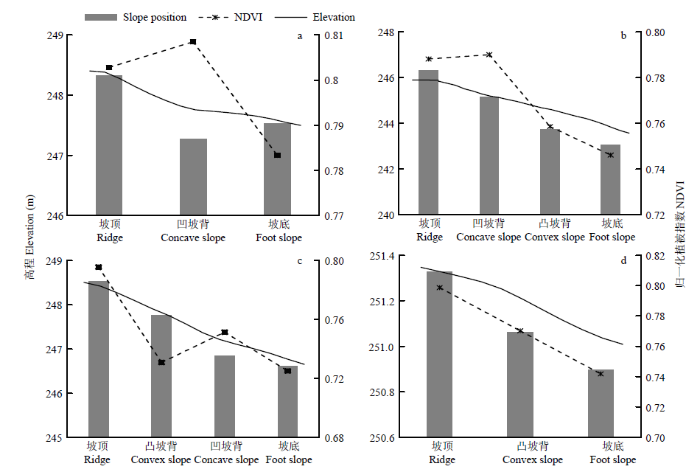
NDVI与不同坡位地形的关系如图5所示。图5-a表明,地势低洼位置的NDVI最高,生长最好。坡顶次之,坡底NDVI最低。在图5-b中,NDVI在凹坡处增大,从凸坡到坡底呈减小趋势。可能在降雨作用下产生的地表径流向凹面位置聚集肥料和养分,因此地势低洼处的NDVI高于凸面位置。此外,坡顶NDVI高于坡底,这可能与作物的生长周期和地形空间位置有关。因为大豆是喜温作物,7月东北地区降雨充足且作物处于开花期,影响大豆生长的主要因素是地表积温。海拔高的地区日照充足,积温高,适宜大豆生长,但农田里的垄向是南北方向的,低海拔位置是一个阴坡,相对缺乏足够的光照影响大豆的生长,所以7月坡顶的NDVI值高于坡底。表4表明NDVI与高程的皮尔森相关系数是0.32**,所以作为输入变量映射地形特征。图5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图5归一化植被指数与地形关系
a:凹坡;b:先凹后凸复合坡;c:先凸后凹复合坡;d:凸坡
Fig. 5Relationship between normalized vegetation index and topography
a: Concave slope; b: Compound slope with the first concave and then convex; c: Compound slope with the first convex and then concave; d: Convex slope
3.3 输入变量的选择
如表5,NDMI的VIF值大于10,TCW、TCB的VIF值大于100,均存在严重的共线性,需要剔除。如表5和表4所示NDVI、NDMI、TCB与高程显著相关并且因子间不存在共线性,所以上述因子与潜在太阳辐射总量(PSR)和SRTM DEM数据一起作为改进SRTM DEM的输入量。Table 5
表5
表5预选变量和输入变量的共线性诊断
Table 5
| 共线性统计 Collinearity statistics | ||
|---|---|---|
| 容忍度 Tolerance | 方差膨胀因子VIF | |
| 预选因子Preselected variable | ||
| 归一化植被指数NDVI | 0.676 | 1.479 |
| 归一化湿度指数NDMI | 0.021 | 47.941 |
| 湿度TCW | 0.004 | 226.167 |
| 亮度TCB | 0.002 | 410.595 |
| 绿度TCG | 0.349 | 2.862 |
| 潜在太阳辐射PSR | 0.885 | 1.131 |
| 航天飞机雷达地形测绘任务SRTM | 0.193 | 5.177 |
| 输入因子Input variables | ||
| 归一化植被指数NDVI | 0.717 | 1.394 |
| 归一化湿度指数NDMI | 0.136 | 7.366 |
| 亮度TCB | 0.124 | 8.071 |
| 潜在太阳辐射PSR | 0.786 | 1.273 |
| SRTM | 0.901 | 1.110 |
新窗口打开|下载CSV
3.4 输入变量对改进的SRTM DEM的影响分析
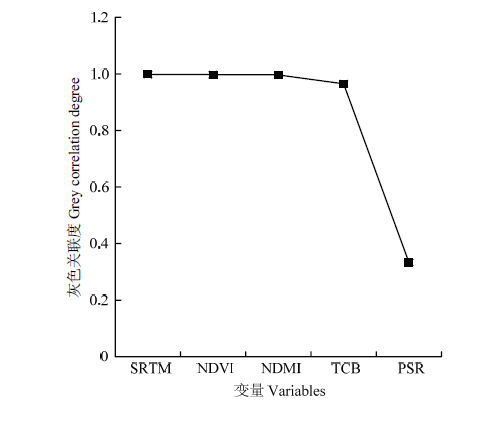
利用关联度衡量单一变量对改进的SRTM DEM的影响(图6)。结果表明耕地范围内各因素对地形的重要程度由高到低依次为SRTM(0.998)>NDVI(0.997)>NDMI(0.996)>TCB(0.965)>PSR(0.333)。研究以SRTM为基础获得更高精度的DEM,通过灰色关联分析的结果可知SRTM可以反映区域地貌的格局,但是由于空间分辨率大,地形的局部特征被忽略,进行重采样并不能提高SRTM的精度(如表6,SRTM重采样后RMSE为14.82 m)然而NDVI、NDMI、TCB拥有更小的空间分辨率,此外NDVI、NDMI、TCB与实际地形的灰色关联度的均在90%以上,是改进的SRTM的重要因素,可以用其填补局部的地形特征。因此引入与地形密切相关的辅助变量有利于改进SRTM DEM。图6
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图6输入变量与改进的SRTM DEM的关联度
Fig. 6The correlation between the input variable and the improved SRTM DEM
Table 6
表6
表6参考和改进的SRTM DEM与实测高程的精度验证
Table 6
| 米 (m) | SRTM | 重采的SRTM Resampled SRTM | 反向传播神经网络 BPNN DEM | 极限学习机 ELM DEM | 资源三号DEM ZY-3 DEM | 无人机DEM UAV DEM |
|---|---|---|---|---|---|---|
| 均方根误差RMSE | 14.77 | 14.82 | 0.98 | 1.01 | 3.69 | 0.10 |
| 偏率Bias | 0.92 | 0.91 | 0.97 | 0.97 | 0.95 | 0.99 |
新窗口打开|下载CSV
3.5 建模与验证
两种神经网络改进SRTM DEM的评价指标如表7。BPNN具有最小的均方根误差,训练数据集与验证数据集的决定系数均在95%以上。BPNN与ELM相比,BPNN模型的稳定性最高。BPNN在改进SRTM DEM中表现出很强的非线性映射能力,同时具有较强的容错能力与泛化能力,进一步提高了模型的稳定性。Table 7
表7
表7模型的精确评估
Table 7
| 建模精度 Modelling Accuracy | 验证精度Validation Accuracy | |||
|---|---|---|---|---|
| 均方根误差RMSE (m) | 决定系数R2 | 均方根误差 RMSE (m) | 决定系数 R2 | |
| 极限学习机ELM | 0.82 | 0.96 | 1.00 | 0.90 |
| 反向传播神经网络BPNN | 0.69 | 0.98 | 0.98 | 0.97 |
新窗口打开|下载CSV
ELM在改进SRTM DEM中并没有BPNN的精度高,但是训练数据集与验证数据集的决定系数保持在90%以上,稳定性较高。
3.6 高精度DEM的评价
图7显示了UAV DEM、ZY-3 DEM、SRTM DEM、BPNN DEM、ELM DEM的空间格局。因为UAV DEM均方根误差为0.10,偏率为0.99,所以将其作为DEM空间格局的参考,反映研究区的实际地形。在空间格局上,虽然资源三号DEM的纹理更加光滑,但是忽略了地形的局部特征,尤其是研究区东北部形成的侵蚀沟。改进后的BPNN和ELM DEM在视觉上与无人机DEM的空间格局相似,以地面实测高程点进行验证,RMSE为0.98 m,与原始SRTM相比有明显的提高。如表6采用RMSE和Bias两个指标进一步定量高程模拟的不确定性,以下5种DEM的垂直精度排序依次是UAV DEM<BPNN<ELM<SRTM(6)<SRTM<ZY-3,BPNN方法获得的高精度DEM具有最小的RMSE(0.98 m)且偏率为0.97,更加接近1。结果表明在整个研究区BPNN方法是获得高精度DEM的最佳方法。此外,如表8所示,因为BPNN(0.84 m)在平坦区的RMSE小于ELM(1.00 m),所以BPNN更适合应用在地势平坦的农业区,而ELM(0.94 m)在起伏区的RMSE小于BPNN(0.99 m)并且小于ELM在平坦区域验证结果,故ELM在起伏区域建模更加具有优势。图7
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图7不同数据源的DEM的空间分布图
Fig. 7Spatial distribution map of DEM from different data sources
Table 8
表8
表8平坦和起伏区域的精度评估
Table 8
| 平坦区 Flat area | 起伏区 Fluctuation area | |||
|---|---|---|---|---|
| 均方根误差RMSE (m) | 偏率 Bias | 均方根误差 RMSE (m) | 偏率 Bias | |
| 极限学习机ELM | 1.00 | 0.98 | 0.94 | 1.01 |
| 反向传播神经网络BPNN | 0.84 | 0.99 | 0.99 | 1.02 |
新窗口打开|下载CSV
4 讨论
4.1 模型的优越性
使用光谱指数和神经网络方法改进SRTM DEM具有挑战性,因为这项研究在输入因子、研究方法、研究区域与以往的研究存在很大的差别。本文研究结果表明NDMI、NDVI、TCB可以作为改进SRTM DEM的辅助信息,通过(3.1)对NDMI、TCB在不同断面的分析发现,NDMI随着地势的升高而逐渐降低,TCB与地形具有协同变化趋势,在研究区侵蚀沟地带TCB随地势的降低而降低。虽然本研究区位于同一气候区,采用统一的管理方式,但是地形通过影响地表物质的空间分布,进而影响作物的长势的空间差异,且灰色关联分析的结果表明NDVI对获得耕地范围高精度的DEM具有重要作用,进一步证实地形是影响研究区作物长势的主要因素,即地形的空间差异影响NDVI空间格局。在东北漫岗地大农场,地形梯度较大,地形与土壤和作物的关系较为显著,建模得到了满意的精度。为了进一步讨论模型在地势起伏大和地势平坦的耕作区的适用性,如图1-d所示,将研究区划分为平坦和起伏两个区域对采用BPNN和ELM两种方法获得的DEM精度进行评估。如表8所示,在平坦区BPNN和ELM的RMSE分别为0.84和1.00 m,在起伏区BPNN和ELM的RMSE分别为0.99和0.94 m,且两种神经网络的偏率均接近1,即无论是平坦还是起伏的农业区该方法均可获得高精度的DEM。
通过与UAV DEM、ZY3 DEM对比,BPNN和ELM方法在提升SRTM的空间分辨率和垂直精度上获得了满意的结果。UAV DEM是通过点云加密生产,是目前农业应用中精度最高的地形数据。BPNN、ELM两种神经网络输入的数据集完全相同,但是不同神经网络算法改进SRTM DEM的精度略有差异,主要原因是两种算法的数学原理不同。BPNN采用的是梯度下降算法,当高程预测输出与实际高程的差值达到设置参数或达到一定迭代次数后停止迭代,冻结权重和阈值,固定网络结构,而ELM对数据训练的整个过程不经过迭代而一次性产生唯一的最优解,精度虽然略低于BPNN,但是降低了计算量和搜索空间,在进行大数据集训练时具有时间优势。由于研究的输入量对改进SRTM DEM的重要程度大,所以均获得高的精度。ZY-3 DEM属于光学立体像对,受大气影响存在一定的系统误差,所以与真实地面高程点误差较大。通过对比进一步说明该方法改进SRTM DEM优越性。
4.2 研究的意义与不足
本文从遥感影像中提取变量,选取与地形关系密切的辅助变量(NDMI、NDVI、TCB、SRTM、PSR)作为输入特征,结合神经网络方法完成制图。最终将SRTM DEM的空间分辨率降低到原来的1/5倍,RMSE降低了20%以上,提供了一种快速、低成本、高精度的DEM生成方法。它是一种高效可行的耕地微地形监测技术,可以为精准农业、黑土区保护等提供帮助。如果要扩大改进的SRTM DEM的范围,可以在小范围内对高精度的DEM训练,运用SRTM DEM进行反演,有望获得区域尺度的高精度DEM产品。虽然该方法在填补DEM数据空白方面具有一定的实用价值,研究结果是在温带大陆性气候、漫川漫岗的黑土区得到的,可以为相似气候区域获得高精度DEM提供参考,但是在其他气候区域(例如:一年2—3季作物的地区),地形与土壤、作物的关系可能不同,所以需要分析地形与辅助变量的关系。此外,从高质量的遥感影像提取的环境变量可能会产生更好的精度。在以后的研究中可以尝试结合多时相遥感数据,模拟单个季度或年度地表物质循环,探索地形影响地表物质循环的机制,以提高模型的适用性。5 结论
本文提出一种新的方法提高公开获取的SRTM DEM的精度,从遥感影像中提取与地形密切相关的协变量,挖掘对改进地形有关键作用的因素,利用神经网络进行训练。最后将改进后的SRTM DEM与ZY-3 DEM和高精度无人机DEM进行对比,结果如下。(1)对改进的SRTM DEM具有重要作用的因素分别为SRTM、NDMI、NDVI、TCB,辅助信息的引入有利于提高SRTM的精度。
(2)在整个研究区BPNN方法获得的数字高程模型的精度高于ELM方法,BPNN方法更加适用于平坦区高精度DEM的获取,ELM方法更加适用于起伏区。
(3)该方法得到的DEM精度高于立体观测卫星(ZY-3)生成的DEM的精度。立体观测卫星生成的DEM忽略了研究区的侵蚀沟,该方法获得的DEM与UAV DEM的空间格局相似,逼近真实地面。
参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 2]
URLPMID:21799706 [本文引用: 1]

Accurately detecting urban expansion with remote sensing techniques is a challenge due to the complexity of urban landscapes. This paper explored methods for detecting urban expansion with multitemporal QuickBird images in Lucas do Rio Verde, Mato Grosso, Brazil. Different techniques, including image differencing, principal component analysis (PCA), and comparison of classified impervious surface images with the matched filtering method, were used to examine urbanization detection. An impervious surface image classified with the hybrid method was used to modify the urbanization detection results. As a comparison, the original multispectral image and segmentation-based mean-spectral images were used during the detection of urbanization. This research indicates that the comparison of classified impervious surface images with matched filtering method provides the best change detection performance, followed by the image differencing method based on segmentation-based mean spectral images. The PCA is not a good method for urban change detection in this study. Shadows and high spectral variation within the impervious surfaces represent major challenges to the detection of urban expansion when high spatial resolution images are used.
URLPMID:30344456 [本文引用: 1]
[本文引用: 2]
[本文引用: 1]
[本文引用: 2]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
URLPMID:26225131 [本文引用: 1]
Colloidal quantum dot solar cells (CQDSCs) are attracting growing attention owing to significant improvements in efficiency. However, even the best depleted-heterojunction CQDSCs currently display open-circuit voltages (VOCs) at least 0.5 V below the voltage corresponding to the bandgap. We find that the tail of states in the conduction band of the metal oxide layer can limit the achievable device efficiency. By continuously tuning the zinc oxide conduction band position via magnesium doping, we probe this critical loss pathway in ZnO-PbSe CQDSCs and optimize the energetic position of the tail of states, thereby increasing both the VOC (from 408 mV to 608 mV) and the device efficiency.
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}