机械泵驱动两相流体回路(Mechanically Pumped Two-phase Loop,MPTL)是以机械泵作为驱动元件,以精密控温型储液器作为控温元件,通过在蒸发段吸收发热元件的热量,在冷凝段将热量释放的闭合回路控温技术。该技术只需很小的输入功耗即可让整个回路具备很大的传热能力,且能够对热源进行精密控温,可以解决小空间、高热载、高精度、多热源或复杂分布热源的冷却问题。目前在宇航领域MPTL的应用案例并不多见,公开报道的只有国际空间站上阿尔法磁谱仪(AMS-Ⅱ)采用了MPTL作为硅微条轨迹探测器的散热系统(TTCS)[6-8]。基于该应用,荷兰国家航空航天局、中山大学等单位开展了基于CO2工质的MPTL试验和仿真分析研究,获得了多项研究成果[9-13]。
本文提出将MPTL应用于航天光学遥感器CCD的热设计,并通过仿真与试验验证了MPTL的运行特性及控温效果,证明了其在CCD精密控温方面应用的可行性。
1 CCD用机械泵驱动两相流体回路 1.1 系统组成 如图 1所示,本文所述CCD用MPTL由机械泵、储液器、预热器、蒸发器、冷凝器及管路组成,各组成部分主要功能如下:
 |
| 图 1 CCD用机械泵驱动两相流体回路系统组成示意图 Fig. 1 Schematic of MPTL system composition for CCD |
| 图选项 |
1) 机械泵是系统的动力核心,用于提供回路内工质运行所需的动力,机械泵的流量应满足系统散热要求,扬程应大于系统总压降,各零部件应与所用工质相容。
2) 储液器是系统的控温单元,通过精确控制储液器的温度可实现蒸发器单元的控温,此外在系统运行工况变化时,内部工质的相变会使得体积发生大幅变化,此时储液器应能够提供系统所需的工质或容纳系统多余的工质。
3) 预热器用于将进入蒸发器单元的工质加热至饱和态(气液两相态),从而确保蒸发器单元中各CCD的精确控温。
4) 蒸发器采用微通道冷板的形式与CCD耦合换热,用于收集CCD工作时的热耗及对CCD精确控温。
5) 冷凝器用于将系统的废热排散至热沉。
1.2 系统工作原理 如图 1所示,MPTL系统通过机械泵产生动力,机械泵出口的液相工质经预热器加热至饱和态,而后进入并联的蒸发器与CCD换热,流经各片CCD的工质始终处于气液两相状态,其温度始终为对应压力下的饱和温度,吸收热量后的工质进入冷凝器将热量排放至热沉并重新回到液相状态进入机械泵完成一个循环。
储液器是MPTL系统最为重要的组件之一,其承担着工质存储、供给、气液分离及精确控温的作用。对于间歇工作的光学遥感器,当CCD开机工作或冷凝器温度升高时,回路内会有更多的液相工质转变为气相,气相体积将大幅增加,此时回路内部多余的液相工质则会流入储液器进行存储;反之,当CCD关机或冷凝器温度降低时,回路内会有更多的气相工质转变为液相,气相体积将大幅减小,此时回路内不足的工质则会由储液器进行补充。在微重力下,储液器还要实现气液分离的作用,以确保流出储液器的工质为液相状态。MPTL的精确控温主要依靠对储液器的高精度温度控制,即通过控制储液器的温度实现对储液器内饱和态工质压力的精确控制,进而实现对蒸发器的精确控温。蒸发器与储液器温差和系统压力的关系可表示为[14]
 | (1) |
式中:TE和TA分别为蒸发器和储液器内工质的温度;ΔPEA为储液器和蒸发器内工质的饱和压差;(dP/dT)sat为饱和温度TA点的压力-温度斜率。
2 机械泵驱动两相流体回路仿真 2.1 仿真模型 MPTL系统的流动可以由瞬态的Navier-Stokes方程描述[15]:
 | (2) |
 | (3) |
 | (4) |
式中:ρ、u、p、

 | (5) |
 | (6) |
 | (7) |
式中:V、l、A、

对于单相管路,摩擦系数f为
 | (8) |
式中:Re为雷诺数。
对于两相管路,压降根据Friedel模型[16]计算得到
 | (9) |
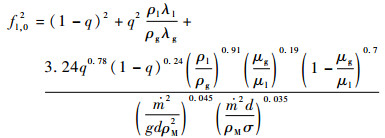 | (10) |
式中:Δpt、fl, 02和Δp0分别为两相流阻、两相流阻系数和液相流阻;q、λ、μ和d分别为干度、热传导率、黏度和直径;下标l、g分别表示液相、气相;ρM为气液平均密度;σ为表面张力系数。
本文基于Sinda/Fluint软件,建立了MPTL系统瞬态数值模型,如图 2所示,所建模型已经被应用于控温型环路热管的仿真分析,模型经过了在轨飞行数据验证[17]。
 |
| 图 2 MPTL系统瞬态数值模型 Fig. 2 Transient numerical model for MPTL system |
| 图选项 |
模型中采用液氨作为工质。通过对储液器外壁面进行控温,可研究工质参数在不同组件内的变化。所有与热物性相关的参数,如氨工质的液相和气相密度、黏度、饱和压力、液体表面张力、汽化潜热和热导率等,均通过在每一时间步、每一计算网格上调用REFPROP数据库得到。
图 3(a)为仿真分析所选取的轨道外热流随时间的变化曲线,图 3(b)为CCD的工作模式,其中低温工况为CCD长期不开机,无热耗;高温工况为CCD每一轨道周期工作8 min,其工作时的功率为45 W。
 |
| 图 3 轨道外热流变化和CCD工作时序 Fig. 3 Variation of external heat flux in orbit and working mode of CCD |
| 图选项 |
2.2 仿真结果分析 图 4给出了低温和高温工况下,辐射冷凝器上的温度分布云图和管路内气液两相的分布图,图中紫色表示气液两相段,蓝色表示液相段。低温工况时,冷凝器上的总外热流最小,且CCD关机,此时冷凝器的温度较低,气液两相段长度较短,进入到冷凝器上管路内的液体,经过较短的距离即被冷却为过冷液体;高温工况时,冷凝器上的总外热流最大,且CCD开机,此时冷凝器的温度较高,气液两相段长度较长,进入到冷凝器上管路内的液体,经过较长的距离才被冷却为过冷液体。通过低温和高温工况的仿真结果可以发现,本文所设计的辐射冷凝器能够满足不同工况下的辐射散热需求,进入到冷凝器上管路内的两相流体均被冷却为过冷液体,能够有效保证回路正常运行。
 |
| 图 4 辐射冷凝器上的温度分布云图与管路内气液两相分布图 Fig. 4 Temperature distribution contour on radiation condenser and gas-liquid two-phase distribution in pipeline |
| 图选项 |
图 5给出了低温工况下,蒸发器内流体的温度和干度随时间的变化曲线。低温工况下,CCD不工作,受外热流影响,蒸发器内饱和流体温度为20.2~20.4℃,干度为0.03~0.11。因此,低温工况时,饱和态的两相工质可以通过干度变化消除轨道外热流的影响,以接近恒定的温度流经蒸发器,从而确保了CCD温度的恒定。
 |
| 图 5 低温工况下蒸发器内流体温度和干度随时间的变化曲线 Fig. 5 Temporal evolution of temperature and quality of working fluid in evaporators for cold case |
| 图选项 |
图 6给出了高温工况下,蒸发器内流体的温度和干度随时间的变化曲线。高温工况下,CCD工作,蒸发器内饱和流体的最大温升为0.9℃,干度的最大变化值为0.5。在高温工况下,CCD产生的热量将蒸发器内两相工质中的部分液体蒸发,引起干度增加,进而导致MPTL系统内的气液两相段长度变长,以及系统流阻的增加。由式(1)可知,流阻的增加将引起蒸发器内流体温度的升高,但对于氨工质而言,该温升值较小,这一特性确保了CCD的温度稳定。相比温度的变化,干度的变化趋势更明显,干度从入口处的0.03上升到了出口处的0.50,这表明蒸发器内的工质吸收热量发生了相变,且未全部变为气相状态,说明所设置的系统流量满足CCD散热的需求。
 |
| 图 6 高温工况下蒸发器内流体温度和干度随时间的变化曲线 Fig. 6 Temporal evolution of temperature and quality of working fluid in evaporators for hot case |
| 图选项 |
3 机械泵驱动两相流体回路试验 3.1 试验系统组成 图 7和图 8分别为MPTL系统的模装图和实物图。试验采用小流量齿轮泵提供工质流动所需的驱动力,工质流量在0~8 L/min可调。储液器为?50 mm×130 mm的圆柱型腔体,内部设有用于产生工质流动动力及气液分离的毛细结构,可同时适用于重力环境和微重力环境;储液器外表面通过粘贴电加热器和连接液冷回路进行加热和冷却,实现对储液器的精确控温,加热功率为10 W,液冷回路的温度为5℃。预热器采用平板型微通道换热器,工质在预热器内部流道内单向流过,通过在预热器表面粘贴电加热器对内部工质加热,使其由入口处的纯液态变为出口处的饱和态。蒸发器为8片冷板组成,同样为平板型微通道换热器,其中每4片冷板串联为一个支路,两个支路并联接入流体回路系统。冷凝器为镶嵌有管路的铝合金平板,并以液冷回路作为热沉进行散热。流体回路沿程全部管路为外径?3 mm的不锈钢管。
 |
| 图 7 MPTL系统模装图 Fig. 7 Mold assembly graph of MPTL system |
| 图选项 |
 |
| 图 8 MPTL系统实物图 Fig. 8 Picture of MPTL system |
| 图选项 |
此外,为配合试验测量,在流体回路内串联一台科氏质量流量计用于流量测量,在机械泵进出口设置一支相对压力传感器,在储液器出口设置一支绝对压力传感器用于压力测量,回路各关键部组件设置有若干支热电偶用于温度测量。流体回路全部部组件及管路外部包覆隔热材料降低空气对流对测试的影响。
3.2 试验结果分析 试验共进行了3个工况,工况内容如表 1所示。
表 1 验证试验工况 Table 1 Verification test condition
| 工况 | 试验项目 | 试验内容 |
| 1 | 启动特性 | 验证流体回路启动性能, 验证流体回路内存在气相时系统启动性能 |
| 2 | 控温特性 | 验证蒸发器温度随储液器温度变化的响应能力 |
| 3 | 运行特性 | 验证蒸发器并联支路对系统运行特性的影响, 验证冷凝器温度波动对系统运行特性的影响 |
表选项
1) 工况1
工况1模拟了流体回路入轨首次启动过程。图 9为首次启动的试验结果。试验前流体回路各部组件(储液器除外)长时间置于试验室环境,各处温度均在26~27℃之间(阶段1)。试验开始后,将储液器温度升至约33℃(阶段1)。打开机械泵,在机械泵的作用下,由于冷凝器中的过冷液体开始循环,使得机械泵、预热器、蒸发器等处温度迅速降低,与此同时将储液器温度降至20℃;待储液器温度稳定后,打开预热器,此时蒸发器的温度随着预热器的温度一起升高,并在约4 600 s时完成过热(阶段2)。完成过热后,预热器和蒸发器温度迅速降低,并稳定在饱和温度(阶段3)。至此启动过程结束。
 |
| 图 9 MPTL系统启动过程 Fig. 9 Start-up process of MPTL system |
| 图选项 |
图 10为MPTL系统管路内存在气相工质时的启动情况。试验开始时,首先给蒸发器模拟负载加电,蒸发器温度迅速升至约70℃,远远高于工质饱和温度,蒸发器内工质呈气相,随后打开机械泵,在机械泵的作用下,冷凝器中的过冷工质流过蒸发器并迅速将蒸发器冷却,系统正常启动。可见,在流体回路管路内存在气相工质时,只需确保机械泵处工质温度低于饱和温度,在打开机械泵后,系统即可正常启动。
 |
| 图 10 MPTL系统管路内存在气相工质时的启动过程 Fig. 10 Start-up process of MPTL system pipeline in gas phase |
| 图选项 |
2) 工况2
如图 11所示,试验开始前将储液器温度由工况1的20℃提高至25℃,试验开始后打开预热器和蒸发器模拟负载,预热器和蒸发器的温度随之上升,约770 s后预热器和蒸发器均达到两相,并稳定在28℃。由此可见,蒸发器对储液器的响应很好,可以通过调节储液器的温度实现对CCD器件温度的控制。
 |
| 图 11 储液器控温特性试验结果 Fig. 11 Test results of temperature control characteristics of liquid accumulator |
| 图选项 |
3) 工况3
图 12(a)为两并联支路低负载功耗运行试验。支路1每个蒸发器加载8 W功耗,支路2每个蒸发器加载4 W功耗。从图 12(b)的试验结果可以看出,系统运行稳定,各蒸发器温差在1℃以内。在此之后通过加大两支路负载功耗的差距,进一步验证流体回路系统的运行稳定性。由图 12(b)中的试验结果可见,在不同的负载下,两支路各片蒸发器的温度均能够保持稳定,且单个支路4片蒸发器之间的温差较小。但是由于蒸发器壳体与内部工质之间热阻的影响,在不同的负载下,蒸发器壳体的温度也不相同,负载越大,蒸发器壳体温度越高。
 |
| 图 12 蒸发器并联支路对系统运行特性影响试验结果 Fig. 12 Test results of influence of parallel branch of evaporator on operation characteristics of system |
| 图选项 |
图 13为冷凝器温度波动对系统运行特性的影响曲线。可见,随着冷凝器温度的变化,进入到机械泵的工质温度也在发生着变化,使得机械泵温度随着冷凝器的温度波动而波动。但是由于预热器和蒸发器处的工质始终处于饱和状态,其温度并不受到冷凝器温度波动的影响,系统运行稳定性很好,CCD仍然能够控制在一个稳定的温度范围内。
 |
| 图 13 冷凝器温度波动对系统运行特性影响试验结果 Fig. 13 Test results of influence of temperature fluctuation of condenser on operation characteristics of system |
| 图选项 |
图 14给出了蒸发器并联使用时,两支路平均温度T_a的仿真与试验结果的对比。通过对比可以发现,仿真与试验结果在整体上的变化趋势基本一致,仿真结果在预测CCD加载功率时,误差在±0.5℃以内,且曲线在该阶段的变化趋势比较一致;在预测CCD未加载功率时,误差相对较大,在±1℃以内,并且仿真结果的变化趋势相对试验更快达到一个平缓的趋势,且仿真的温度比试验结果相对较低,这主要与试验测试时隔热材料的包覆的程度有关。通过仿真与试验的对比,验证了模型的有效性和准确度。该模型可以用于预测MPTL系统的瞬态工作特性,并可用于理解和分析MPTL系统的工作特性。
 |
| 图 14 仿真与试验结果对比 Fig. 14 Comparison between simulation and test results |
| 图选项 |
4 结论 本文首次提出将MPTL应用于航天光学遥感器CCD的热设计,并开展了仿真与试验验证,验证了MPTL的运行特性及控温效果,证明了其用于CCD器件精密控温的可行性。仿真及试验的主要结论如下:
1) 通过仿真,验证了蒸发器内工质的温度具有较好的稳定性和均匀性,通过干度的调节来吸收冷凝器外热流和CCD工作模式的影响,可以为系统提供良好的恒温边界。
2) 通过试验,验证了MPTL的启动特性、控温特性和运行特性,从试验结果可知,MPTL具有很好的控温特性,应用于CCD器件的控温时,可以提供优于±1℃的控温精度;MPTL具有很好的鲁棒性,蒸发器并联支路、蒸发器负载和冷凝器温度在一定范围内变化等均不会对系统运行稳定性产生影响,流体回路仍可将CCD器件控制在所需温度。
3) 通过仿真与试验对比,发现仿真模型的误差在±1℃以内,验证了仿真模型的有效性和准确度。该模型可以用于预测MPTL系统的瞬态工作特性,并可用于理解和分析MPTL系统的工作特性。
参考文献
| [1] | 赵英时. 遥感应用分析原理与方法[M]. 北京: 科学出版社, 2002. ZHAO Y S. Principles and methods of remote sensing application analysis[M]. Beijing: Science Press, 2002. (in Chinese) |
| [2] | 赵振明, 雷文平.环路热管在CCD热设计中的应用[C]//第十二届全国热管会议, 2010: 301-306. ZHAO Z M, LEI W P. Loop heat pipe application in CCD thermal design[C]//12th Chinese Heat Pipe Conference, 2010: 301-306(in Chinese). |
| [3] | 童叶龙, 李国强, 余雷, 等. CCD组件的热分析和热试验[J]. 航天返回与遥感, 2014, 35(5): 46-53. TONG Y L, LI G Q, YU L, et al. Heat dissipation and precise temperature control for high-power CCD assembly[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(5): 46-53. DOI:10.3969/j.issn.1009-8518.2014.05.007 (in Chinese) |
| [4] | 陈恩涛, 卢锷. 空间遥感器CCD组件热设计[J]. 光学精密工程, 2000, 8(6): 522-525. CHEN E T, LU E. Thermal engineering design of CCD component of space remote-sensor[J]. Optics and Precision Engineering, 2000, 8(6): 522-525. DOI:10.3321/j.issn:1004-924X.2000.06.003 (in Chinese) |
| [5] | GAO T, YANG T, ZHAO S L.The design and application of temperature control loop heat pipe for space CCD camera[C]//International Symposium of Spaces Optical Instrument and Application, 2017: 15-20. |
| [6] | DELIL A A M, PAUW A, WOERING A A.AMS-2 tracker thermal control system-design and thermal modeling of the mechanically pumped two-phase CO2 loop: AIAA-2003-345[R].Reston: AIAA, 2003. |
| [7] | LIU J, PEI N Q, GUO K H, et al. Experimental investigation on a mechanically pumped two-phase cooling loop with dual-evaporator[J]. International Journal of Refrigeration, 2008, 31(7): 1176-1182. DOI:10.1016/j.ijrefrig.2008.02.014 |
| [8] | ZHANG Z, SUN X H, TONG G N, et al. Stable and self-adaptive performance of mechanically pumped CO2 two-phase loops for AMS-02 tracker thermal control in vacuum[J]. Applied Thermal Engineering, 2011, 31: 3783-3791. DOI:10.1016/j.applthermaleng.2011.07.015 |
| [9] | HUANG Z C, HE Z H, MO D C, et al. Coupling between an accumulator and a loop in a mechanically pumped carbon dioxide two-phase loop[J]. Microgravity Science and Technology, 2009, 21(1): 23-29. |
| [10] | 刘杰.航天机械泵驱动两相流冷却环路循环特性的研究[D].上海: 上海交通大学, 2008: 115-117. LIU J.Investigations on running characteristics of the mechanically pumped two-phase cooling loop for space applications[D].Shanghai: Shanghai Jiao Tong University, 2008: 115-117(in Chinese). http://d.wanfangdata.com.cn/Thesis/Y1415517 |
| [11] | VAN ES J, PAUW A, VAN DONK G.AMS02 tracker thermal control cooling system test results of the AMS02 thermal vacuum test in the LSS at ESA ESTEC: AIAA-2012-3577[R].Reston: AIAA, 2012. |
| [12] | MO D C, XIAO W J, HUANG Z C, et al. Comparison of pressure drop between calculation and experiment for a two-phase carbon dioxide loop[J]. Microgravity Science and Technology, 2008, 20(3-4): 183-186. DOI:10.1007/s12217-008-9019-2 |
| [13] | SUN X H, HE Z H, HUANG Z C, et al. Analysis of temperature oscillations in parallel evaporators of a carbon dioxide two-phase loop[J]. Microgravity Science and Technology, 2009, 21(Supl 1): 299-304. |
| [14] | KU J T.Operating characteristics of loop heat pipes[C]//29th International Conference on Environmental Systems, 1999: 1991-01-2007. |
| [15] | 庄礼贤, 尹协远, 马晖扬. 流体力学[M]. 2版. 合肥: 中国科学技术大学出版社, 2009: 65-89. ZHUANG L X, YIN X Y, MA H Y. Fluid mechanics[M]. 2nd ed. Hefei: University of Science and Technology of China Press, 2009: 65-89. (in Chinese) |
| [16] | FRIEDEL L.Improved friction pressure drop correlation for horizontal and vertical two-phase pipe flow[C]//European Two-Phase Flow Group Meeting, 1979: 1158-1162. |
| [17] | MENG Q L, YANG T, LI C L, et al. Numerical simulations and analyses of temperature control loop heat pipe for space CCD camera[J]. Journal of Thermal Science, 2016, 25(5): 402-409. DOI:10.1007/s11630-016-0877-4 |
