当今的航母大国关于舰载机弹射起飞的研究开展较早且技术成熟,但能够获取的资料很有限,国内的相关研究主要集中在动力学建模[1-3]、起飞环境的影响分析[4-10]、机/舰适配性[11]及飞行控制设计[12-15]。其中,有关弹射起飞控制设计的研究成果并不多,大多是针对纵向运动特性,多采用的是线性化模型和传统的PID控制方法。而舰载机离舰初期的侧向运动特性也十分重要,文献[16]指出,舰载机在离舰后的3 s内滚转角应小于5°,否则飞机会有潜在的失控翻转危险,或因纵向和侧向之间的耦合作用而导致升力减小、下沉量增大。近年来,虽然已有科研人员对弹射起飞侧向运动的影响因素进行了仿真分析[9-10],但未对飞行过程加以控制。而在实际弹射作业过程中,飞行员因承受载荷过大,无法操控飞机,因此只能依赖控制器自动控制飞机的姿态和轨迹。
本文借鉴相关文献对侧向影响因素的分析结果,建立了舰载机离舰上升段的全量非线性运动模型,研究了飞机离舰时多种可能的初始姿态以及受到侧风干扰作用后的运动特性,并设计了基于非线性动态逆方法的控制器,以保障飞机在离舰初期的起飞安全。
1 数学模型建立 综合考虑舰载机自身的气动特性和环境影响因素,建立上升段舰载机的全量非线性运动模型,并对弹射起飞过程侧向的相关影响因素进行建模。
1.1 舰载机的非线性运动模型 舰载机在离舰上升段主要受到发动机推力、气动力和重力的作用,受力分析如图 1所示。图中:G为飞机重力。
 |
| 图 1 舰载机离舰上升段受力分析示意图 Fig. 1 Schematic of force analysis of carrier aircraft in climbing phase after leaving ship |
| 图选项 |
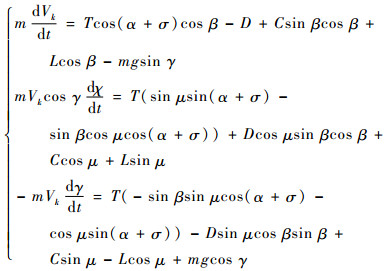
采用国际标准坐标系,视飞机为刚体,忽略地球自转及曲率的影响,可得飞机动力学方程为
 | (1) |
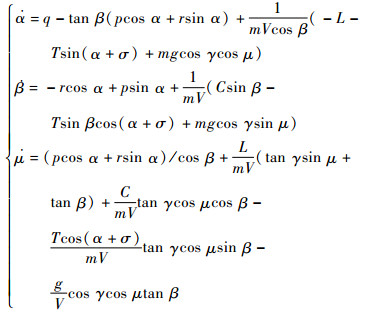
飞机运动方程可表示为
 | (2) |
式中:m为飞机的质量; g为重力加速度; V为舰载机的空速值;Vk为飞机的航迹速度;p为飞机的滚转角;q为飞机的俯仰角;r为飞机的偏航角;γ为飞机的航迹角;χ为航迹偏转角;μ为航迹滚转角;α为飞机迎角;σ为发动机安装角;T为发动机推力;D为飞行阻力;C为飞机所受侧力;L为升力。
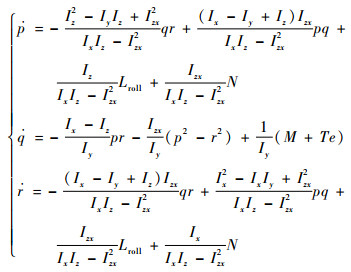
三轴角运动方程为
 | (3) |
式中:Ix、Iy、Iz为飞机的惯性矩;Izx为飞机的惯性积;Lroll、N、M分别为飞机的气动力滚转、俯仰、偏航力矩;e为飞机的发动机推力偏心距。
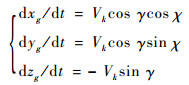
轨迹运动方程为
 | (4) |
式中:xg、yg、zg为飞机位移在三个坐标轴上的分量。
1.2 航母运动模型 航母在航行时,受海风和浪涌的影响会作六自由度的复杂运动,其中对舰载机弹射起飞侧向影响较大的主要是横摇和偏摆运动,研究表明可用正弦波的组合来描述。在中等海况下:
横摇运动
 | (5) |
偏摆运动
 | (6) |
式中:?s和ψs分别为甲板横摇角和偏摆角, (°)。
上述甲板运动综合影响的结果可导致舰载机在离舰时具有最大为6°的滚转角和最大为0.7°的偏航角[16]。
1.3 侧风模型 为利于舰载机的弹射起飞,航母通常迎着海风行驶,即便如此,起飞方向难免与海风风向之间存在一定夹角,导致飞机受到侧向风的干扰。舰载机在舰面滑跑阶段,侧向甲板风会影响飞机的侧滑角,但由于此时飞机受到舰面上多种外力的约束,由侧滑角改变引起的气动力变化对飞机的作用并不明显,故认为甲板风仅影响了离舰时的初始侧滑角。而离舰上升段,风速矢量的叠加使舰载机的空速方向发生了改变,从而影响飞机的运动。因此,定量研究叠加风速矢量后的附加侧滑角是建模的关键。
如图 2所示,舰载机的原飞行速度Vk与飞机轴线的夹角为原侧滑角βk,在叠加了风速Vi后,飞行速度Va与飞机纵轴线的夹角,即侧滑角βa=βk+βw,βw=arctan(Vw/Vk),Vw为Vi垂直于Vk的分量[17-18]。忽略Vw对Vk大小的影响。
 |
| 图 2 侧风对于飞机侧滑角的影响示意图 Fig. 2 Schematic of influence of crosswind on side-slip angle of aircraft |
| 图选项 |
由于侧滑角的改变,飞机的气动力和力矩会受到影响,因此考虑侧风干扰时,舰载机非线性模型中的β及与β相关的气动参数都用的是βa。
2 弹射起飞影响因素分析 2.1 纵向运动影响因素 舰载机弹射起飞的纵向安全边界准则包括离舰后的下沉量、飞机迎角以及在达到轨迹最低点之后的3 s内飞机的爬升率[19],这些指标受以下诸多因素的影响。
1) 起飞质量。在弹射力和发动机推力一定的情况下,起飞质量将影响飞机在弹射冲程末端获得的末速度,若质量与弹射力和发动机推力不匹配,将可能会导致离舰后的下沉量增大[11]。
2) 发动机推力。舰载机离舰后需要保持一定的剩余推力,以保证飞机能稳定爬升[20]。因此,弹射过程中发动机始终保持加力状态有利于增大弹射末速度,可以提高弹射起飞的性能。
3) 弹射力。弹射力是飞机获得加速度的主要来源,会直接影响舰载机的弹射末速度,应根据舰载机型号和实际载荷选取合适的弹射力大小[11]。
4) 甲板风。在舰载机弹射起飞过程中,航母迎风行驶可以提高飞机相对大气的运动速度,相当于增大飞机空速,增加升力,减小飞机离舰后飞行轨迹的下沉量[3]。舰艏气流也可以减小舰载机下沉量,增大离舰后的爬升率,且正向风速越大,对弹射起飞越有利。
5) 前起落架突伸。在弹射器动力冲程内,前起落架受到弹射器的牵引力而产生弹性形变,在冲程结束后,牵引力消失,起落架弹性势能释放而产生突伸作用,给舰载机施加抬头力矩,有助飞机建立起飞迎角[21-22]。
6) 平尾预置偏角。由于弹射滑跑过程纵向过载很大,离舰初始飞行员无法操纵飞机,只能通过预置平尾偏角来调节飞机的起飞迎角,因此需根据需求设置合理的平尾预置偏角。
7) 航母纵摇。在甲板的多种运动中,影响纵向运动特性的有纵摇、升沉和垂荡,其中纵摇对下沉量影响较大。正纵摇角和向上的垂向速度会减小下沉量,负纵摇角和向下的垂向速度会增大下沉量[4]。
8) 地效作用。舰载机离舰瞬间由于地效作用的消失会导致升力减小并产生低头力矩,是舰载机离舰后出现下沉量的主要诱因之一。增大弹射末速度并在飞机离舰后设计飞行控制系统稳定飞机姿态能够减小离舰后的下沉趋势。
2.2 侧向运动影响因素 影响舰载机弹射起飞离舰上升段侧向运动的因素如下[9]:
1) 航母横摇。航母甲板横摇的运动赋予舰载机离舰瞬间的初始滚转角,如果在离舰后不能及时控制修正,将威胁舰载机的起飞安全。
2) 航母偏摆。航母的偏摆运动改变了舰艏的方向,相应地影响了舰载离舰时的航向,影响飞机的初始侧滑角和离舰后的航向稳定性[23]。
3) 甲板风。如果航母的航行方向与海风风向存在一定夹角,则舰载机会受到侧向甲板风的作用,形成初始侧滑角,进而影响滚转角。
4) 弹射道偏角。极少数航母为了提升弹射效率,在斜角飞行甲板上设置了弹射器,在使用斜角甲板弹射起飞时,若飞机离舰后轨迹向靠近航母的方向偏离,会导致与舰艏距离过近,甚至发生碰撞,此时舰载机侧向控制的重要性尤甚[8]。
5) 初始定位偏心。若舰载机进入弹射预定位置后,重心在甲板上的投影没有落在弹射器的中心线内,则在弹射的过程中会产生轻微的摆振,最终影响舰载机的弹射末速度。不过一般情况下,影响并不明显,因此不必重点研究[9]。
通过上述分析,舰载机离舰瞬间的滚转角和滚转角速度主要受航母横摇的影响,侧滑角主要受侧风的影响,偏航角主要受偏摆运动的影响。各种影响因素通过改变舰载机离舰时的初始角度和角速度,进而改变气动力矩,影响飞机的运动状态。对飞机离舰后气动特性影响较大的是侧滑状态和滚转运动,但横向和侧向运动之间又存在耦合作用,因此通过计算分析滚转角速度和侧风风速对飞机滚转力矩和偏航力矩影响的权重,并由此确定在耦合的横侧向运动中起主要作用的影响因素,以便更有针对性的设计控制器。
采用控制变量法,计算在不同滚转角速度和侧风风速的情况下,舰载机离舰时具有的滚转力矩,结果如图 3所示。对比可见,滚转角速度对滚转力矩的影响作用更明显。
 |
| 图 3 滚转力矩影响因素分析 Fig. 3 Analysis of factors affecting rolling moment |
| 图选项 |
同理,在不同偏航角速度和侧风风速的情况下,舰载机离舰时具有的偏航力矩如图 4所示。对比可见,侧风风速对偏航力矩的影响更明显。
 |
| 图 4 偏航力矩影响因素分析 Fig. 4 Analysis of factors affecting yaw moment |
| 图选项 |
综上所述,影响舰载机弹射起飞过程的各种因素如表 1所示。
表 1 舰载机弹射起飞影响因素 Table 1 Factors affecting catapult take-off of carrier aircraft
| 影响因素 | 影响指标 | |
| 纵向 | 起飞质量 | 末速度 |
| 发动机推力 | 末速度 | |
| 弹射力 | 末速度 | |
| 甲板风 | 末速度 | |
| 前起落架突伸 | 起飞迎角 | |
| 平尾预置偏角 | 起飞迎角 | |
| 航母纵摇 | 下沉量 | |
| 地效作用 | 下沉量 | |
| 侧向 | 航母横摇 | 偏航角 |
| 航母偏摆 | 侧滑角 | |
| 甲板风 | 侧滑角 | |
| 弹射道偏角 | 末速度 | |
| 初始定位偏心 | 末速度 | |
表选项
上述影响因素中,对飞机侧向运动起主要作用的包括航母甲板运动以及侧向风干扰,并且通过计算分析梳理了对舰载机气动特性的影响关系。因此,在后续的仿真中重点设置初始滚转角速度和侧风风速的相应对照研究以分析对飞机离舰后运动状态的直接作用。
此外通过分析可知,舰载机弹射起飞的过程会受到很多因素的影响,使飞机的运动状态发生改变,而在弹射的过程中,因为生理因素飞行员又无法对飞机进行操控,因此必须要设计合适的控制器,对飞机离舰以后的飞行状态进行控制以保证起飞安全。
3 侧向控制律设计 有关舰载机弹射起飞纵向的控制律设计已进行了很多研究,取得了良好的控制效果,而对于侧向控制律的研究则鲜有涉及,这主要是因为横侧向运动之间存在耦合,控制难度大。而弹射起飞侧向的运动状态对于起飞安全性又十分重要,因此本文主要设计舰载机离舰上升段侧向控制律并进行仿真研究。文献[16]指出,舰载机在离舰后的3 s内滚转角应小于5°,故选取滚转角作为飞机侧向安全性的主要评价指标。因在航迹坐标系下建模,采用的变量为航迹滚转角μ,虽不等同于?,不过在侧滑角不大时,可近似认为两者相等,且当μ为零时可以得到此时?也为零,因此设计控制律时,选取μ的期望值为零。因为考虑了常值侧风的干扰,飞机会出现附加侧滑角,这会增大起飞过程中的不确定性,为了满足起飞安全以及维持飞机运动平稳,不允许侧滑角变化过大,所以选取侧滑角期望值为零,以消除侧滑状态,抑制侧风干扰对起飞过程的影响。
由于飞机横向和侧向运动之间存在耦合作用,基于非线性建模时,若采用传统的PID控制方法,无法实现对系统的解耦,调试参数会非常困难,且控制效果较差。而非线性动态逆是考虑了飞机横向和侧向的运动特性以及控制舵面之间的耦合作用而综合设计的控制律,对系统进行了解耦,控制效果更优良;而且PID控制方法不考虑系统的模型,而非线性动态逆方法是依据系统的模型来进行控制器的设计,更具针对性,精确度更高。因此,本文采用非线性动态逆的方法设计弹射起飞离舰上升段控制律。
根据时标分离的原则,将舰载机动力学变量分成快慢不同的4组,每组子系统包含3个变量:极慢状态x0=[xg??yg??zg]T;非常慢状态x3=[V??χ??γ]T;慢状态x2=[α??β??μ]T;快状态x1=[p??q??r]T。并根据控制需求,设计快状态和慢状态变量的控制器[24]。图 5为非线性动态逆控制系统的结构。
 |
| 图 5 弹射起飞非线性动态逆控制系统结构 Fig. 5 Structure of catapult launch nonlinear dynamic inverse control system |
| 图选项 |
3.1 快状态回路设计 选取变化最快的角速度式(3)为快变量,将快变量状态方程改写成与飞机状态和控制作用有关的两部分。通过将气动力矩Lroll、M与N的计算式中的操纵量(δa、δe及δr)分离为单独的控制输入阵gf(xf),并将其余项写入到ff(xf)中,可以得到仿射型结构的快状态回路表达式为
 | (7) |
式中:xf=[T, V, γ, α, β, μ, p, q, r]T;gf(xf)为操纵量输入的增益阵,表示舵面偏转对角加速度的影响。使用期望值


 | (8) |
快状态回路设计的目的是对3个加速度状态p、q、r进行线性化解耦控制。式(8)中快状态理想的动态响应

 | (9) |
式中:根据实际仿真需要,选取回路带宽ωp=ωq=ωr=10 rad/s;快状态的指令信号pc、qc、rc由慢回路控制器产生。
3.2 慢状态回路设计 慢状态回路是包围快状态控制律的外回路。慢状态回路的输出为快状态回路的期望输入,选取α、β、μ为相应的慢状态,通过将式(2)中的角速度量分离为输入变量,可将其写为仿射型结构:
 | (10) |
式中:xs=[T, V, γ, α, β, μ]T。为了简化动态逆的计算,这里忽略舵面产生的力的影响,如果忽略快回路的动态响应过程,根据与内回路相似的设计方法,相应的快状态指令信号pc、qc、rc为
 | (11) |
式中:


 | (12) |
其中:ωα=ωβ=ωμ=2 rad/s。
慢状态指令信号αc、βc、μc根据需要给定期望输入。由于本文重在研究侧向运动特性,故不对迎角做过多限制,在仿真时仅给定βc、μc的期望值进行分析研究。
4 仿真分析 本文以某型舰载机为例,采用式(1)~式(4)的非线性运动模型,弹射离舰的初速度为52 m/s,迎角为0°,发动机推力为8.7×104 N,飞机初始滚转角和侧滑角主要受到航母甲板运动的影响,甲板运动的模型已由式(5)和式(6)给出。飞机在离开舰面前是固连于航母甲板的,因此可以认为舰载机离舰时的滚转角等于航母的横摇角,偏航角等于航母的航向偏摆角,侧滑角取决于航母的行驶方向与海风风向之间的角度。为减小侧向风的干扰,通常会调整航母的前进方向使甲板风的角度不大于30°。选取2种典型的航母甲板运动的初相位,通过计算得到飞机离舰时的初始角度及角速度(见表 2),并设置无初始偏差的状态作对比验证。
表 2 某舰载机离舰时的初始角运动状态 Table 2 Initial angle motion state when a carrier aircraft is leaving ship
| 工况 | 滚转角/ (°) | 滚转角速度/ ((°)·s-1) | 偏航角/ (°) | 偏航角速度/ ((°)·s-1) |
| 1 | 0 | 0 | 0 | 0 |
| 2 | 4.3 | 1.98 | 0.3 | 0.13 |
| 3 | 6.0 | 0.1 | 0.36 | -0.04 |
表选项
侧向初始状态如表 2所示,不加入侧风干扰时,仿真结果如图 6所示。
 |
| 图 6 甲板运动对飞机离舰后运动状态的影响 Fig. 6 Effect of deck motion on motion state of aircraft after leaving ship |
| 图选项 |
由图 6可见,舰载机在具有所取的初始状态时,滚转角不能满足离舰后最初3 s内小于5°的要求,甚至随着时间推移继续增大。而由于侧向运动的耦合性,飞机也会出现侧滑。不难看出,甲板运动对舰载机离舰后的飞行状态具有很重要的影响,若不加以控制,滚转角不能满足安全条件,且会出现侧滑和航向偏移,威胁起飞安全。
采用表 2的工况1作为初始状态,加入侧风模型,取风向角度为航母行进方向的右前方30°,风速大小根据海况等级分别取6、10、16 m/s(即三、五、七级海况),仿真结果如图 7所示。
 |
| 图 7 侧风干扰对飞机离舰后运动状态的影响 Fig. 7 Effect of crosswind interference on motion state of aircraft after leaving ship |
| 图选项 |
由图 7可见,飞机离舰时无初始偏角,离舰后受到右侧风影响,滚转角出现波动态势,幅值均未超出安全要求量,侧滑角呈正负交替振荡态势。与图 6对比可发现,侧风对舰载机离舰后的滚转角影响不如甲板运动大,但会产生较大的侧滑角。
为研究侧风与甲板运动对舰载机离舰后运动状态的综合影响,取表 2的工况2,分别选取风向角度为航母行进方向的右前方30°和左前方30°,风速取6 m/s,观察不同风向下,舰载机具有初始偏角时的运动特性,如图 8所示。
 |
| 图 8 不同风向的侧风对飞机离舰后运动状态的影响 Fig. 8 Effect of crosswind with different wind directions on motion state of aircraft after leaving ship |
| 图选项 |
由图 8可见,飞机在离舰时具有右滚转姿态,若受右侧风干扰,舰载机的滚转角会进一步增大,航迹偏转也更严重;若受左侧风干扰,舰载机的滚转角在初期会略微减小,而随后也会逐渐增大,航向偏转变化稍缓,但在由滚转运动引起的航向偏转的情况中没有改变总体变化趋势。不难看出,风向不同,虽然角度变化趋势略有差别,但并没有改变飞机最初的右滚转和右偏航状态,侧滑角则均呈正负振荡态势。
因此,舰载机离舰时因甲板运动导致的初始滚转角和角速度会使上升段中的滚转运动以及由滚转所引起的偏航运动产生明显的变化,可见甲板横摇运动对舰载机离舰后的侧向运动特性有明显的影响。而且通过分析可知,在甲板运动和侧风干扰的综合影响下,舰载机的运动状态可能会超出侧向安全准则的边界条件。所以,设计侧向控制律对舰载机弹射起飞的安全性十分重要。
第3节已论述了本文采用非线性动态逆方法是因为在舰载机离舰上升段控制中,横侧向之间耦合作用引起PID控制方法调参困难,效果不佳。在此,首先进行仿真验证,对比2种方法的差别。
对于PID控制方法,引入β作为方向舵反馈信号,引入μ作为副翼反馈信号,通过反复试验,得出控制效果相对良好的参数设置。取表 2的工况2作为初始状态,并加入10 m/s的侧风,风向为右前方30°,设置βc和μc的期望值均为0°,分别应用第3节所设计的非线性动态逆控制律和PID控制律,由图 9可见,PID控制律选取的主要反馈变量能够收敛到期望值,但收敛速度和效果都不理想,且偏航角和航迹偏移量等出现了较大偏差,远不如采用非线性动态逆的方法精确和稳定,难以满足舰载机离舰上升段的控制目标。
 |
| 图 9 PID控制方法与非线性动态逆方法效果对比 Fig. 9 Comparison of PID control method and nonlinear dynamic inverse method |
| 图选项 |
因此,引入本文设计的非线性动态逆控制律,取表 2的工况2和工况3作为初始状态,加入6 m/s的侧风,风向为右前方30°,设置βc和μc的期望输入均为0°,仿真结果如图 10所示。
 |
| 图 10 非线性动态逆控制律作用对飞机离舰后运动状态的影响 Fig. 10 Effect of nonlinear dynamic inverse control law on motion state of aircraft after leaving ship |
| 图选项 |
图 10与图 7对比可见,加入非线性动态逆控制律后,飞机的滚转角迅速减小,最终能稳定于0°;削弱了侧滑角的振荡幅度,对航向偏移也起到了抑制作用。侧向偏移量则由自然状态下的几十米缩减到不足1 m,控制效果明显。
取表 2的工况2作为初始状态,加入侧风,风向为右前方30°,风速大小根据海况等级分别取6、10、16 m/s,引入非线性动态逆控制律,依然设置βc和μc的期望输入均为0°,仿真结果如图 11所示。
 |
| 图 11 非线性动态逆控制律作用下侧风干扰对飞机离舰后运动状态的影响 Fig. 11 Effect of crosswind interference on motion state of aircraft after leaving ship under nonlinear dynamic inverse control law |
| 图选项 |
图 11与图 8对比可见,加入非线性动态逆控制律后,飞机的滚转角能迅速减小,并最终稳定于0°。飞机侧滑角初期出现波动,随后也能稳定于0°附近,侧向偏移量在控制律的作用下不超过1 m,控制效果依然明显。
5 结论 1) 对舰载机弹射起飞过程中可能影响起飞安全的各种因素进行了详尽分析,建立了舰载机离舰上升段的六自由度非线性运动模型,着重对影响侧向运动特性的主要干扰因素进行仿真,结果表明甲板运动的影响比侧风干扰要更明显。
2) 开展的弹射起飞控制律设计的研究对中国未来的舰载机设计及起飞技术的发展有着重要的技术储备价值,研究成果可以为中国今后航空母舰作战力量的提升和舰载机弹射起飞技术的发展奠定一定的理论基础。
3) 采用了非线性动态逆方法针对侧向运动特性设计快、慢2个状态回路的控制律,并仿真验证了控制系统能在短时间内消除舰载机的滚转姿态,防止飞机出现严重的侧滑,抑制侧风干扰对舰载机上升段的飞行姿态和航向的影响,保障起飞安全。
4) 采用的非线性动态逆方法是最基本的形式,需要指出的是,其需要对象的数学模型较为精确,若模型存在误差,则可以考虑将鲁棒控制或滑模控制的一些理论与动态逆方法相结合, 以获得更好的控制效果,可成为未来的研究方向。
参考文献
| [1] | 王俊彦, 吴文海, 高丽, 等. 舰载机弹射起飞建模与控制[J]. 飞机设计, 2010, 30(2): 10-13. WANG J Y, WU W H, GAO L, et al. Modeling and control of launching and taking-off of shipboard aircraft[J]. Aircraft Design, 2010, 30(2): 10-13. (in Chinese) |
| [2] | 王萌辉, 赵波. 舰载飞机起降动力学研究[J]. 飞机设计, 1997(1): 21-33. WANG M H, ZHAO B. Research on dynamics of shipborne aircraft taking off and landing[J]. Aircraft Design, 1997(1): 21-33. (in Chinese) |
| [3] | 郭元江, 李会杰, 申功璋, 等. 复杂环境下舰载机弹射起飞环境因素建模分析[J]. 北京航空航天大学学报, 2011, 37(7): 877-881. GUO Y J, LI H J, SHEN G Z, et al. Modeling and analysis of the factors of launching and taking off of carrier-based aircraft in complex environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(7): 877-881. (in Chinese) |
| [4] | 贾忠湖, 高永, 韩维. 航母纵摇对舰载机弹射起飞的限制研究[J]. 飞行力学, 2002, 20(2): 19-21. JIA Z H, GAO Y, HAN W. Research on the limitation of aircraft carrier's panning to the launch of shipborne aircraft[J]. Flight Dynamics, 2002, 20(2): 19-21. DOI:10.3969/j.issn.1002-0853.2002.02.005 (in Chinese) |
| [5] | 蔡丽青, 江驹, 王新华, 等. 甲板运动对舰载机弹射起飞特性的影响[J]. 飞行力学, 2014, 32(2): 105-109. CAI L Q, JIANG J, WANG X H, et al. Influence of deck motion on ejection characteristics of carrier aircraft[J]. Flight Dynamics, 2014, 32(2): 105-109. (in Chinese) |
| [6] | 王大海, 苏彬. 舰面运动对弹射起飞特性的影响[J]. 飞行力学, 1994, 12(1): 57-63. WANG D H, SU B. The influence of ship surface motion on ejection takeoff characteristics[J]. Flight Dynamics, 1994, 12(1): 57-63. (in Chinese) |
| [7] | 贺少华, 刘东岳, 谭大力, 等. 载机舰船气流场相关研究综述[J]. 舰船科学技术, 2014, 36(2): 1-7. HE S H, LIU D Y, TAN D L, et al. A review of research on airflow fields of carrier ships[J]. Ship Science and Technology, 2014, 36(2): 1-7. DOI:10.3404/j.issn.1672-7649.2014.02.001 (in Chinese) |
| [8] | 林佳铭, 张轶, 乐挺, 等. 非对称因素对舰载机弹射起飞安全的影响[J]. 北京航空航天大学学报, 2018, 44(2): 363-374. LIN J M, ZHANG Y, LE T, et al. Influence of asymmetry on the safety of launching takeoff of carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(2): 363-374. (in Chinese) |
| [9] | 于浩, 聂宏. 偏中心定位对弹射过程中飞机姿态的影响[J]. 北京航空航天大学学报, 2011, 37(1): 10-14. YU H, NIE H. The influence of off-center positioning on the attitude of the aircraft during the ejection process[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(1): 10-14. DOI:10.3969/j.issn.1005-4561.2011.01.004 (in Chinese) |
| [10] | 朱齐丹, 刘恒, 李晓琳. 舰载机偏心情况下弹射起飞研究[J]. 飞行力学, 2016, 34(2): 10-14. ZHU Q D, LIU H, LI X L. Research on catapult takeoff in shipborne engine eccentricity[J]. Flight Dynamics, 2016, 34(2): 10-14. (in Chinese) |
| [11] | 刘星宇, 许东松, 王立新. 舰载飞机弹射起飞的机舰参数适配特性[J]. 航空学报, 2010, 31(1): 102-108. LIU X Y, XU D S, WANG L X. Parameter adaptation characteristics of ship-based aircraft for catapult takeoff[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(1): 102-108. (in Chinese) |
| [12] | 朱熠.舰载机起飞控制与仿真技术研究[D].南京: 南京航空航天大学, 2012. ZHU Y.Research on take-off control and simulation technology of carrier aircraft[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2012(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1012041557.htm |
| [13] | 朱熠, 江驹, 甄子洋, 等. 舰载机弹射起飞上升段控制律研究[J]. 电光与控制, 2012, 19(2): 13-16. ZHU Y, JIANG J, ZHEN Z Y, et al. Research on control law of shipborne aircraft launching and rising section[J]. Electronics Optics & Control, 2012, 19(2): 13-16. DOI:10.3969/j.issn.1671-637X.2012.02.004 (in Chinese) |
| [14] | 严重中, 冯家波. 舰载飞机弹射起飞上升段的自动控制飞行[J]. 南京航空航天大学学报, 1995, 27(4): 431-438. YAN Z Z, FENG J B. Automatic control flight of shipborne aircraft ejection and take-up section[J]. Journal of Nanjing University of Aeronautics and Astronautics, 1995, 27(4): 431-438. (in Chinese) |
| [15] | 程世超.舰载机弹射起飞参数优化及自动控制飞行的研究[D].哈尔滨: 哈尔滨工程大学, 2012. CHENG S C.Study on parameters optimization and automatic control flight of aircraft launching and launching[D].Harbin: Harbin Engineering University, 2012(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10217-1012517070.htm |
| [16] | Naval Air Systems Command. NATOPS flight manual navy model F/A-18E/F 165533 and up aircraft[M]. Washington, D.C.: Department of the Navy, 2008. |
| [17] | 吴文海. 飞行综合控制系统[M]. 北京: 航空工业出版社, 2007. WU W H. Flight integrated control system[M]. Beijing: Aviation Industry Press, 2007. (in Chinese) |
| [18] | COLLINSON R P G. Introduction to avionics systems[M]. Berlin: Springer, 2009. |
| [19] | LUCAS C B.Catapult criteria for a carrier-based airplane: AD702814[R].Washington, D.C.: Naval Air Systems Command, 1968. |
| [20] | 甄子洋, 江驹, 王新华, 等. 舰载机不同弹射系统的弹射过程[J]. 电光与控制, 2012, 19(5): 7-10. ZHEN Z Y, JIANG J, WANG X H, et al. The ejection process of different ejection systems for carrier-based aircraft[J]. Electronics Optics & Control, 2012, 19(5): 7-10. DOI:10.3969/j.issn.1671-637X.2012.05.002 (in Chinese) |
| [21] | 胡淑玲, 林国锋. 前起落架突伸对舰载机起飞特性的影响[J]. 飞行力学, 1994(1): 28-34. HU S L, LIN G F. Influence of the outrigger stretching on the takeoff characteristics of carrier aircraft[J]. Flight Dynamics, 1994(1): 28-34. (in Chinese) |
| [22] | 郑本武. 前起落架突伸对舰载飞机弹射起飞航迹的影响[J]. 南京航空航天大学学报, 1994, 26(1): 27-33. ZHENG B W. Influence of the outrigger stretching on the cataclytic take-off track of shipborne aircraft[J]. Journal of Nanjing University of Aeronautics and Astronautics, 1994, 26(1): 27-33. (in Chinese) |
| [23] | 朱齐丹. 航母舰载机安全起飞、着舰技术[M]. 哈尔滨: 哈尔滨工程大学出版社, 2016: 86-87. ZHU Q D. Safe take-off and landing technology of aircraft carrier aircraft[M]. Harbin: Harbin Engineering University Press, 2016: 86-87. (in Chinese) |
| [24] | 韩英华, 范彦铭. 基于非线性动态逆的无人机自动着陆控制系统[J]. 航空学报, 2008, 29(增刊): 66-72. HAN Y H, FAN Y M. Automatic landing control system for UAV based on nonlinear dynamic inversion[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(Sup.): 66-72. (in Chinese) |
