商业化一体式的三维激光扫描仪内部结构复杂,多用于远距离大尺寸的土木工程扫描或者小距离小范围的三维产品建模[8],通常价格昂贵,并且体积较大,不适用于需要对其移动范围进行精确建模的小型智能移动机器人[9-10]。为解决此问题,研究者们通过对二维激光测距传感器进行改进来得到适用于各种应用场合的三维激光扫描系统。德国的自主智能系统研究所(Fraunhofer Institute for Autonomous Intelligent Systems)将二维激光测距传感器增加一维扫描装置来实现三维扫描[11]。Chou和Liu[12]将二维激光测距传感器安装在曲柄摇杆四连杆机构重复旋转运动2个极端之间的位置,允许2个水平和垂直扫描以实现三维激光扫描功能。项志宇[13]研制一个俯仰扫描装置转动二维激光测距传感器的扫描平面,并对三维激光扫描系统进行了标定工作。然而,上述方法因其机械构造形式,很难灵活适应于移动机器人的复杂的安装条件。针对相关应用需求,本文设计了一套由高精度旋转云台和小型二维激光测距传感器组成的三维激光扫描系统,通过步进电机控制云台转动来实现激光测距传感器的俯仰扫描,利用带轮实现旋转运动的传动。由于其传动机构的安装和尺寸的灵活性,类似的设计方案可充分利用移动机器人机体空间,实现小型化轻量化的三维扫描系统。
由于制造及安装误差,三维扫描系统不可避免地与设计原型有着几何参数上的误差,此误差将累积在最终扫描点的三维坐标测量中,因此系统参数标定结果是否准确直接影响系统的最终测量精度,也成为近年来的研究热点[14-15]。在测量系统标定中,关键的因素为设计能够准确识别并反映参数关系的标定特征。郭扬等[16]提出基于激光扫描平面的旋转特点,采用正四棱锥作为标定对象,通过平面射影变换中直线不变的映射关系建立了标定对象表面被测点在不同参考系之间变换的约束关系,通过空间变换关系求解系统参数标定值。付梦印等[17]设计一套云台驱动二维激光测距传感器的旋转扫描,制作2个标杆作为标定物完成实验,并采用最小二乘法原理对系统进行了标定。
上述方法所使用的特征标记点测量准确性受激光扫描边缘效应的影响,因而精度受限。为此,本文采用了Zhuang等[18]的激光与单目视觉联合标定工作中的标记方案。其原理为利用黑白格圆孔标定板,激光检测到的圆孔中心点按照四邻域关系计算与黑白格角点相对应的激光数据特征角点,从而与视觉中提取的黑白格角点形成匹配对,完成联合标定工作。而本文将其标定思想拓展应用于一个三维激光扫描系统参数的内参标定上,使用的标定特征为标定板上的镂空圆孔,其标记点为圆孔中心。并在标定实验方案中平移标记板利用圆孔的空间排布关系,可获取3个空间坐标方向的标记点组,从而最小化标记点在3个维度的测量误差。本文由统计平均法实现高于扫描分辨率的标记点定位精度,提高了标定算法的精度和可靠性,并在实验中予以验证。本文将从系统设计及测量原理、参数标定方法、标定实验及测量实验验证4个部分介绍相关工作。
1 三维激光扫描系统设计 1.1 机构设计原理 本文所设计的三维激光扫描系统主要由二维激光测距传感器、旋转云台、同步带轮和相关机械零部件组成,其机械结构设计原理图如图 1所示。整个系统由动力执行装置、动力传递装置和激光测距传感器3部分组成。其中动力执行装置是由步进电机驱动高精度旋转云台进行高精度可控旋转运动输出。动力传递装置使用2个同步带传动机构,具有精度高、传动距离较长以及结构简单等特点。旋转云台旋转轴到中间转轴为一级传动,中间转轴到安装二维激光测距传感器的旋转轴为二级传动。调整2个传动带的长度和中间转轴的位置,即可在复杂安装空间灵活实现传动功能,从而控制云台转动以控制激光测距传感器的俯仰扫描动作。二维激光测距传感器安装在与旋转轴相连的固定支架上,设计固定支架使激光测距传感器的旋转轴轴心所在平面与激光测距传感器光心扫描平面相重合,使激光测距传感器在俯仰扫描时以旋转轴轴心为轴进行俯仰旋转。
 |
| 图 1 三维激光扫描系统机构设计原理图 Fig. 1 Schematic diagram of 3D laser scanning system mechanism design |
| 图选项 |
1.2 三维测量原理 针对三维测量系统结构特点,定义3个坐标系(见图 2):①激光测距传感器坐标系{B},原点位于传感器光心,XB轴与激光测距传感器旋转轴轴线平行,XBOBYB为二维激光扫描面,{B}为随旋转轴转动的动坐标系;②测量系统坐标系{A},原点为激光测距传感器旋转轴轴线与YAOAZA平面的交点,XA轴通过旋转轴中心,YA轴平行于YB轴,坐标系{A}也为随旋转轴转动的动坐标系;③初始坐标系{A*}为相对于安装支架固定的坐标系,本文定义其与激光测距传感器抬头到最高位置时的{A}重合。
 |
| 图 2 系统坐标系 Fig. 2 System's coordinate systems |
| 图选项 |
如图 3所示,以激光测距传感器坐标系{B}为基准,设P为空间中任意一点,ρ为激光测距传感器返回的距离值,σ为发射点到P点的光束在当前扫描平面内的返回的角度值。设激光测距传感器空间某一点P的读数为(ρ, σ),理想情况下,P点在空间坐标系{B}中的三维坐标(x,y,z)为
 | (1) |
 |
| 图 3 激光测距传感器坐标系 Fig. 3 Coordinate system of laser ranging sensor |
| 图选项 |
用位置矢量APBO描述{B}的坐标原点相对于{A}的位置,用旋转矩阵BAR描述{B}相对于{A}的姿态,空间中任意一点P在2个坐标系{A}和{B}中的描述AP和BP具有变换关系[19]:
 | (2) |
用欧拉角表示旋转矩阵BAR,如式(3)所示。其中α、β和γ是坐标系旋转欧拉角。
 | (3) |
激光测距传感器在进行俯仰扫描过程中,坐标系{A}偏离固定坐标系{A*}。由图 2坐标系相对位置关系的定义可知,{A}与{A*}原点重合,X轴方向一致。设在俯仰扫描过程中{A}绕X轴偏离{A*}的角度为θ,则从{A}到{A*}的旋转矩阵可表示为
 | (4) |
 | (5) |
将式(2)代入式(5)得到空间任意一点从二维激光坐标系的坐标值到固定坐标系中坐标值变换关系为
 | (6) |
即得三维激光扫描系统设计的三维坐标算法为
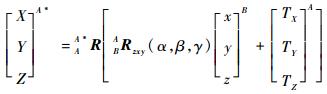 | (7) |
旋转矩阵AA*R中绕XA轴旋转的θ角为已知量; X、Y和Z为圆孔中心点在测量系统坐标系{A*}中的三维坐标值; TX、TY和TZ为激光测距传感器发射点光心点OB相对于旋转轴中心点OA的位置参数。
将式(7)展开可得到(X, Y, Z)T的参数表达式:
 | (8) |
式中:(x, y)T为通过式(1)得到的被测物体在二维激光测距仪坐标系{B}中的原始测量量;(X, Y, Z)T为其在最终固定坐标系{A*}中的坐标值,用于构建最终的地图信息。从原始测量信息计算地图坐标信息需要用到表征坐标系{B}与坐标系{A}关系的位姿量(α, β, γ, TX, TY, TZ)T以及表征坐标系{A*}与坐标系{A}关系的旋转角度θ。θ可由步进电机的步距角精确得到,而(α, β, γ, TX, TY, TZ)T则与三维激光扫描系统设计制造和装配相关。由于机械零件制造精度和系统装配精度的误差影响,真实系统的(α, β, γ, TX, TY, TZ)T会偏离其设计值,大大影响三维扫描系统的测量精度,因此有必要构建可靠的实验系统及计算方法对其进行参数标定,提高三维激光扫描系统的最终测量精度。
2 参数标定 2.1 标定实验系统设计 标定实验系统设计如图 4所示,由精密滑台和标定板组成。标定通常需要对已知参数特征物体进行测量,利用对特征物体的实际测量结果与理论结果之间的误差校正计算测量系统的参数。本文采用了一种类似视觉校正标定板的标定系统,在平面标定板上利用圆形通孔作为特征形状,根据扫描深度值不同区分落在标定板上的激光点和圆孔内的激光点,最后提取圆孔中心点的坐标作为参数标定所用的特征点位置。标定板的设计如图 5所示,共有6个行列相错的圆孔,提供了x、z坐标值的相互差异的6个特征点,dx、dz分别代表标定板上X轴和Z轴方向的几何尺寸。而标定板能够在精密滑台上移动特定距离,形成新的一组特征点测量,与原有特征点在y坐标上具有互异性,从而使得标定实验特征点集在X、Y和Z方向上形成具有特定已知分布结构的组群。在标定实验中,标定板垂直于精密滑台移动平面,需要将标定板平面与图 2中旋转轴在空间上保证平行。
 |
| 图 4 标定实验系统 Fig. 4 Calibration experimental system |
| 图选项 |
 |
| 图 5 标定板示意图 Fig. 5 Schematic of calibration plate |
| 图选项 |
提取特征点的方法如下:
1) 图 6(a)为激光测距传感器单次扫描得到的拟合点。二维激光测距传感器的原始测量值根据式(1)可得,因此可以得到该扫描线上所有点在坐标系{B}中的坐标值。
 |
| 图 6 标定过程原理图 Fig. 6 Schematic diagram of calibration process |
| 图选项 |
2) 图 6(b)为激光测距传感器俯仰扫描得到的平面拟合点。三维激光扫描系统通过控制步进电机驱动激光测距传感器进行俯仰扫描,得到标定板平面的所有扫描点值。同样可以根据式(1)得到标定板平面上所有拟合点在坐标系{B}中的坐标值。
3) 图 6(c)为提取圆孔中心点的坐标值。通过平行扫描线上落入某孔径的扫描点个数判定通过圆孔中心的扫描线,因此可以得到圆孔中心点的坐标值。
4) 图 6(d)为通过精密滑台移动标定板获得多组标定实验数据,dy表示在Y轴方向的几何尺寸。重复上述步骤得到标定板在不同位置时的多组圆孔中心点的坐标值,形成最终的特征点集。
2.2 标定算法 标定算法的目的是根据2.1节中特征点的测量值对式(8)中的系统参数(α, β, γ, TX, TY, TZ)T进行校正以提高系统的测量精度。设在实验中共有n个特征点,则由2.1节算法可得到在坐标系{B}中对n个特征点的坐标值,标记为{xi, yi}T (i=1, 2, …, n)。设第1组测量中标定板左上角圆孔中心对应的特征点在坐标系{A*}中的坐标值为(X0, Y0, Z0)T。若共做了2组标定测量,则对应产生12组特征点,其在坐标系{A*}中的理论坐标值为
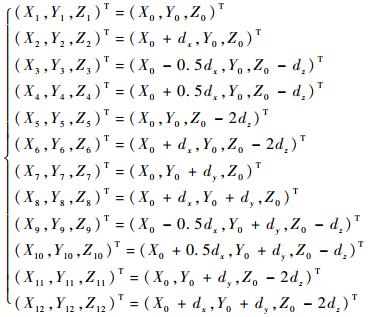 | (9) |
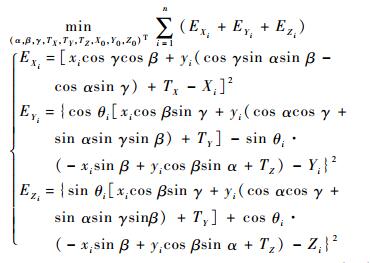
则标定算法即为寻找最优的(α, β, γ, TX, TY, TZ)T和(X0, Y0, Z0)T使特征点在坐标系{A*}中坐标的测量值与理论值误差最小,即求解式(10)所示的最优解问题:
 | (10) |
式(10)为典型的非线性最小二乘法优化求解问题,EXi、EYi、EZi分别为在X、Y、Z方向测量值与理论值的误差。本文采用基于文献[20]的Direct全局优化算法,设定优化量的上下界值,迭代求得参数的全局最优解。
3 标定实验及结果分析 3.1 系统硬件 三维激光扫描系统构成如图 7所示,底层运动控制板驱动由二维激光测距传感器和旋转云台组成的三维激光扫描系统,并将扫描获取的数据处理储存至计算机,形成完整的三维扫描图。三维激光扫描系统的组成由HOKUYO UST-10LX二维激光测距传感器、军达腾飞JDXZ-100高精度旋转云台和NI myRIO嵌入式开发板、同步带和相关机械零部件组成。标定实验系统由精密滑台和镂空一定数量圆孔的标定板组成。激光测距传感器扫描面水平扫描范围为270°,水平扫描采样间隔为0.25°,最大有效测距范围是0.06~10m。理想情况下激光测距传感器可完成任意俯仰角度的旋转,云台由NI myRIO嵌入式开发板控制的步进电机驱动,转动分辨率达0.001°,为了与水平扫描采样间隔相匹配,本实验设定俯仰扫描采样间隔为0.15°。
 |
| 图 7 三维激光扫描系统构成示意图 Fig. 7 Structure diagram of 3D laser scanning system |
| 图选项 |
搭载此系统的是一台加拿大DrRobot公司生产的捷豹4驱轮形机器人(Jaguar-4×4-Wheel),是一款适用于全地形室内外的移动机器人。
3.2 标定实验 标定算法流程如图 8所示,三维激光扫描系统标定现场如图 9所示。镂空圆孔标定板安装在NHK90手动精密滑台上,棋盘方格尺寸为12cm×12cm,在黑色棋盘格中镂空一定数量且相对位置关系已知的圆孔,镂空圆孔直径为10cm。标定板距激光测距传感器为2.0m。当采集完2.0m处的数据后,移动精密滑台使标定板距激光测距传感器2.2m处,再采集2.2m处的数据。
 |
| 图 8 标定算法流程框图 Fig. 8 Flowchart of calibration algorithm |
| 图选项 |
 |
| 图 9 三维激光扫描系统标定现场 Fig. 9 Scence of 3D laser scanning system calibration |
| 图选项 |
在2.0m和2.2m采集的各6个圆孔中心标记点在坐标系{B}中的测量数据如表 1所示。
表 1 圆孔中心点坐标值 Table 1 Coordinate value of circular hole center point
| 标记点 | 2.0m处圆孔中心坐标值/mm | 标记点 | 2.2m处圆孔中心坐标值/mm | |
| 1 | (208.90,2015.86,0) | 7 | (203.33,2225.31,0) | |
| 2 | (451.83,2025.42,0) | 8 | (450.04,2230.17,0) | |
| 3 | (93.47,2011.62,0) | 9 | (90.09,2214.50,0) | |
| 4 | (340.23,2022.84,0) | 10 | (337.90,2220.12,0) | |
| 5 | (208.96,2016.36,0) | 11 | (203.61,2225.30,0) | |
| 6 | (452.58,2029.35,0) | 12 | (450.22,2229.64,0) |
表选项
初始值和上下边界值如表 2所示,初始值设为标定参数的理论值。其中TY值为50mm,是激光测距传感器安装位置与旋转轴的理论距离值,考虑激光测距传感器的测距精度,X和Y上下界是以40mm为基准, 考虑制造精度和安装精度,Z、TX、TY和TZ上下界以5mm为基准,α、β和γ上下界以2°为基准。
表 2 未知量初始值和上下边界值 Table 2 Initial value and upper and lower boundary value of unknown variables
| 标定参数 | 初始值 | 下界值 | 上界值 |
| X/mm | 208.90 | 168.90 | 248.90 |
| Y/mm | 2065.86 | 2025.86 | 2105.86 |
| Z/mm | 0 | -5 | 5 |
| α/(°) | 0 | -2 | 2 |
| β/(°) | 0 | -2 | 2 |
| γ/(°) | 0 | -2 | 2 |
| TX/mm | 0 | -5 | 5 |
| TY/mm | 50 | 45 | 55 |
| TZ/mm | 0 | -5 | 5 |
表选项
3.3 标定结果分析 标定实验完成后得到如表 1所示的12个圆孔中心标记点的坐标值,将数据代入到标定算法中在MATLAB中进行最小二乘法求解参数,得到的标定结果如表 3所示。
表 3 标定结果 Table 3 Calibration results
| 标定参数 | 数值 |
| X/mm | 212.35 |
| Y/mm | 2 055.97 |
| Z/mm | -2.82 |
| α/(°) | 0.011 |
| β(°) | -0.091 |
| γ/(°) | 0 |
| TX/mm | 1.34 |
| TY/mm | 45.01 |
| TZ/mm | 4.96 |
表选项
12个标记点的X、Y和Z方向上的均值标准差柱状图如图 10所示。X方向的平均偏差值为3.66mm,标准差为3.17mm。Y方向的平均偏差值为4.76mm,标准差为3.11mm。Z方向的平均偏差值为4.56mm,标准差为2.85mm。
 |
| 图 10 均值标准差柱状图 Fig. 10 Histogram of mean and standard deviation |
| 图选项 |
激光测距传感器在2m处X方向点云之间的间隔值为8.73mm;Y方向点云之间的间隔值在10mm内;Z方向点云之间的间隔值为5.24mm。则参数标记的标记点重投影误差分析如表 4所示,平均误差值小于扫描系统在此距离处的分辨率。
表 4 重投影误差 Table 4 Reprojection error
| 轴方向 | X方向 | Y方向 | Z方向 |
| 平均重投影误差/pixel | 0.42 | 0.48 | 0.87 |
表选项
4 实际扫描场景测试 为了验证三维激光扫描系统的性能,在实验室放置胶桶和纸箱作为被扫描对象。利用三维激光扫描系统对图 11所示的实际场景进行扫描测量。实验中,激光测距传感器的测量距离范围设为1300~2500mm,激光水平扫描范围设为80°~100°。提取出实物与周围环境的点云图,可以获取实物在周围环境中的相对位置信息。
 |
| 图 11 实物扫描测试 Fig. 11 Physical scanning test |
| 图选项 |
实验所生成的点云如图 12所示,关键尺寸的三维扫描测量误差依次为5.77,6.60,0.04,6.80mm,平均误差为4.80mm。为比较所设计三维激光扫描系统与其使用的二维激光扫描仪的测量精度,在距离为2m处进行了100次二维激光扫描实验,计算得二维激光扫描仪平均测量误差为4.84mm,与三维激光扫描系统几乎一致。由此可知,本文的三维扫描系统机械设计合理,系统标定精确,产生的三维测量误差主要由所使用的二维激光扫描仪精度所决定。
 |
| 图 12 实物点云图 Fig. 12 Contour of physical point |
| 图选项 |
引入无单位量纲K来评估三维扫描系统的测量精度,K值越小表征三维激光扫描精度越高。
 | (11) |
式中:Me为测量误差;Md为测量距离。
将本文的激光测距传感器相关性能参数以及三维扫描误差和其他文献进行对比(见表 5),所设计和标定的三维激光系统能够达到相对高的测量精度,证明了本文系统设计和参数标定方法的合理性和可靠性。
表 5 三维激光扫描系统误差对比 Table 5 Comparison of 3D laser scanning system error
| Laser型号 | 最大测距/m | 测量距离/m | 测量误差/mm | 测量精度/‰ |
| UST-10LX | 10 | 2 | 6.80 | 3.40 |
| SICK-LMS100[12] | 20 | 1 | 7.9 | 7.90 |
| DLS-C15[21] | 150 | 2 | 8.1 | 4.05 |
| SICK-LMS221[22] | 80 | 8.19 | 30 | 3.66 |
表选项
5 结论 本文设计了一套由高精度旋转云台和小型二维激光测距传感器组成的三维激光扫描系统,通过步进电机控制云台精细动作来实现激光测距传感器的俯仰扫描。另外,本文采用了一种新型镂空圆孔标定板作为标定对象,并设计相关实验以完成对三维激光扫描系统进行精确标定。
1) 在移动机器人平台上搭载此系统获取室内周边环境的空间三维信息,实验结果表明,三维激光扫描系统获取周围三维信息的精度较高,且整个系统设计方案成本低廉、结构简单轻便,为移动机器人动态地图构建技术提供了重要的外部环境感知工具。
2) 实物表面点云数据存在少量噪声点,这是由激光测距传感器的测量噪声所引起的。
下一步将通过点云的预处理进行噪声点的滤除以进一步提高系统的测量性能。
参考文献
| [1] | HUANG H, BRENNER C, SESTER M. A generative statistical approach to automatic 3D building roof reconstruction from laser scanning data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 79(5): 29-43. |
| [2] | VANEGAS C A, ALIAGA D G, BENES B. Automatic extraction of Manhattan-World building masses from 3D laser range scans[J]. Transactions on Visualization and Computer Graphics, 2012, 18(10): 1627-1637. |
| [3] | JR O C B, MIZUSHIMA A, ISHⅡ K, et al. Development of an autonomous navigation system using a two-dimensional laser scanner in an orchard application[J]. Biosystems Engineering, 2007, 96(2): 139-149. DOI:10.1016/j.biosystemseng.2006.10.012 |
| [4] | USAMENTIAGA R, MOLLEDA J, GARCIA D F. Fast and robust laser stripe extraction for 3D reconstruction in industrial environments[J]. Machine Vision and Applications, 2012, 23(1): 179-196. DOI:10.1007/s00138-010-0288-6 |
| [5] | 王曾兰.基于二维激光雷达数据的三维重建研究[D].沈阳: 东北大学, 2013: 13-17. WANG Z L.Three dimensional reconstruction based on two dimensional laser radar data[D]. Shenyang: Northeastern University, 2013: 13-17(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10145-1015529864.htm |
| [6] | WANG Y K, HUO J, WANG X S.A real-time robotic indoor 3D mapping system using duel 2D laser range finders[C]//The 33rd Chinese Control Conference.Nanjing: Shanghai System Science Press, 2014: 8542-8546. |
| [7] | 海智渊.激光3D导航系统设计与研究[D].长春: 长春理工大学, 2014: 7-13. HAI Z Y.Design and research on 3D laser navigation system[D]. Changchun: Changchun University of Science and Technology, 2014: 7-13(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10186-1014187918.htm |
| [8] | 陈辉, 马世伟, NUECHTER A. 基于激光扫描和SFM的非同步点云三维重构方法[J]. 仪器仪表学报, 2016, 17(5): 1148-1157. CHEN H, MA S W, NUECHTER A. Non-synchronous point cloud algorithm for 3D reconstruction based on laser scanning and SFM[J]. Chinese Journal of Scientific Instrument, 2016, 17(5): 1148-1157. (in Chinese) |
| [9] | 赵煦.基于地面激光扫描点云数据的三维重建方法研究[D].武汉: 武汉大学, 2010: 18-22. ZHAO X.Research on 3D reconstruction of point cloud from terrestrial laser scanning[D]. Wuhan: Wuhan University, 2010: 18-22(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10486-2010167250.htm |
| [10] | 曾齐红.机载激光雷达点云数据处理与建筑物三维重建[D].上海: 上海大学, 2009: 67-75. ZENG Q H.Airborne lidar point cloud data processing and 3D building reconstruction[D]. Shanghai: Shanghai University, 2009: 67-75(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252698.htm |
| [11] | SURMANN H, NUCHTER A, HERTZBERG J. An autonomous mobile robot with a 3D laser range finder for 3D exploration and digitalization of indoor environments[J]. Robotics and Autonomous Systems, 2003, 45(3-4): 181-198. DOI:10.1016/j.robot.2003.09.004 |
| [12] | CHOU Y S, LIU J S. A robotic indoor 3D mapping system using a 2D laser range finder mounted on a rotating four-bar linkage of a mobile platform[J]. International Journal of Advanced Robotic Systems, 2013, 10(1): 1-10. DOI:10.5772/52938 |
| [13] | 项志宇. 快速三维扫描激光雷达的设计及其系统标定[J]. 浙江大学学报(工学版), 2006, 40(12): 2130-2133. XIANG Z Y. Fast 3D scanning laser radar system design and calibration[J]. Journal of Zhejiang University(Engineering Science), 2006, 40(12): 2130-2133. DOI:10.3785/j.issn.1008-973X.2006.12.024 (in Chinese) |
| [14] | 曹双倩, 袁培江, 陈冬冬, 等. 激光测距传感器光束矢向和零点位置标定方法[J]. 北京航空航天大学学报, 2018, 44(6): 1321-1327. CAO S Q, YUAN P J, CHEN D D, et al. Calibration method for laser beam direction and zero point of laser displacement sensor[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6): 1321-1327. (in Chinese) |
| [15] | 范明争, 韩先国. 基于标定及补偿提高串联机器人定位精度方法[J]. 北京航空航天大学学报, 2017, 43(1): 176-183. FAN M Z, HAN X G. Precision improvement method for serial robot localization based on a new calibration and compensation strategy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(1): 176-183. (in Chinese) |
| [16] | 郭扬, 杜正春, 姚振强. 大尺寸三维激光测量系统标定方法[J]. 上海交通大学学报, 2012, 46(2): 223-227. GUO Y, DU Z C, YAO Z Q. Calibration of a large-scale 3D laser measurement system[J]. Journal of Shanghai Jiaotong University, 2012, 46(2): 223-227. (in Chinese) |
| [17] | 付梦印, 李超, 王美玲, 等. 基于机器人激光测距数据的三维扫描系统的设计与实现[J]. 仪器仪表学报, 2008, 29(4): 434-438. FU M Y, LI C, WANG M L, et al. A 3D scanning system based on range data from mobile robot's laser scanner[J]. Chinese Journal of Scientific Instrument, 2008, 29(4): 434-438. (in Chinese) |
| [18] | ZHUANG Y, YAN F, HU H. Automatic extrinsic self-calibration for fusing data from monocular vision and 3-D laser scanner[J]. Transactions on Instrumentation and Measurement, 2014, 63(7): 1874-1876. DOI:10.1109/TIM.2014.2307731 |
| [19] | 熊有伦. 机器人技术基础[M]. 武汉: 华中科技大学出版社, 2011: 16-26. XIONG Y L. Robot technology foundation[M]. Wuhan: Huazhong University of Science and Technology Press, 2011: 16-26. (in Chinese) |
| [20] | RENFRO C. Encyclopedia of optimization[J]. Reference Reviews, 2009, 584(4): 31-52. |
| [21] | 刘钦, 刘桂华, 罗颖, 等. 基于一维激光测距仪和云台的场景三维重建[J]. 工具技术, 2011, 45(11): 76-79. LIU Q, LIU G H, LUO Y, et al. Three-dimensional reconstruction scene algorithm based on one-dimensional laser ranger and pan-tilt[J]. Tool Engineering, 2011, 45(11): 76-79. DOI:10.3969/j.issn.1000-7008.2011.11.024 (in Chinese) |
| [22] | 李赣华.基于摄像机和二维激光测距仪的三维建模关键技术研究[D].长沙: 国防科学技术大学, 2006: 98-99. LI G H.Key technologies for 3D model construction using camera and 2D laser range finder[D]. Changsha: National University of Defense Technology, 2006: 98-99(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-90002-2008098428.htm |
