上述文献是基于非隐身飞机自卫干扰展磕研究,并没有考虑隐身飞机自卫干扰的作战模式。文献[8]从探测概率角度出发,详细分析了4种典型隐身飞机的RCS起伏数据与虚警概率、探测距离和信噪比等参数的关系;文献[9]基于隐身飞机动态RCS序列,计算了不同飞行航迹下的雷达探测概率。
本文借鉴文献[1-7]中评估非隐身飞机机载自卫干扰性能的数学模型,并结合文献[8-9]中以雷达探测概率为基础评价飞机隐身性能的研究方法,建立侧站盘旋航迹,解算飞机视线姿态角,获取动态RCS序列,研究了隐身飞机自卫干扰模式下,雷达探测性能的强弱变化。
1 隐身飞机自卫干扰模型 1.1 问题描述 考虑图 1所示的空地对抗场景:装载自卫干扰设备的隐身飞机在空中执行作战任务。如果飞机进入地面雷达的探测区域范围,雷达发射信号并探测目标,隐身飞机接收到来自地面发射的危险信号,利用自卫干扰设备释放干扰,以降低雷达探测性能,确保自身安全飞行。图 1中:Rj为隐身飞机进行自卫干扰的干扰距离(雷达和隐身飞机的实时空间位置);Rmax呜面雷达探测隐身目标的最大作用距离;Dj为雷达干扰的烧穿距离。
 |
| 图 1 隐身飞机自卫干扰场景 Fig. 1 Self-defense jamming scenario of stealth aircraft |
| 图选项 |
为便于分析,对作战场景作如下假设:
1) 地面雷达和隐身飞机所在大气环境空间介质均匀,忽略地面杂波及回波/干扰等的多径传播效应。
2) 自卫干扰方式只研究噪声压制干扰,暂不考虑随机脉冲干扰、拖引干扰等其余自卫干扰方式。
3) 隐身飞机的飞行航迹用侧站盘旋模型进行模拟,航迹参数设置充分考虑雷达的烧穿距离,不考虑飞行环境(大气流速、电磁传播等)的影响。
4) 隐身飞机突防对象只研究单部雷达的情形,不考虑双/多基地雷达组网形式。
5) 自卫干扰过程不考虑间断情形。
1.2 飞机敏感性分析 隐身飞机的动态RCS是视线姿态角的敏感函数,与静态RCS不同,动态过程主要包括:①突防过程中,飞机的视线姿态角实时变化;②空气流速不均导致飞行姿态扰动;③上升、俯冲和转弯飞行时,飞行舵面的转动。
上述动态因素反映了隐身飞机的真实飞行状态。其中,第①和②条是主要考虑因素,第③条在选择合适的工作频段,设定飞行航迹后,可以减小其影响。
飞机视线姿态角主要包括方位角、俯仰角和滚转角三维信息,如图 1所示。文献[10]在比较了目标动态RCS的2种模式后,给出了方位角和俯仰角控制的二维动态结果,即RCS的起伏是由视线姿态角的实时变化和姿态扰动共同引起的。通过大量实验和仿真确定,隐身飞机在典型飞行航迹下的视线姿态角范围是可行的,因此,考虑二维视线姿态角变化计算动态RCS是主要研究途径。
1.3 动态RCS获取步骤 隐身飞机采用的隐身技术[11-12]主要分为被动隐身(又称消极隐身)技术和主动隐身(又称积极隐身)技术两大类。前者尽可能减少机体的电磁、红外、可见光、声音等可探测信息特征,以降低对方各种探测系统的探测概率,缩短探测距离,使对方防御系统来不及反应,通常采用外形隐身设计和雷达隐身材料实现隐身目的。而后者是降低飞机信号特征的第二代方法,包括红外隐身、射频隐身等,主要采用电子干扰、光电对抗等方法来欺骗、干扰、迷惑、阻断对方的探测系统,以及利用某些技术降低威胁辐射雷达的射频能量,减少被对方探测发现的可能。
对于飞机隐身性能的评估,目前主要通过求解目标RCS的数值进行具体量化。RCS幅度起伏特性是描述目标动态过程的重要应用之一,其获取过程包括航迹模型设置、飞机受力分析、时变姿态解算和电磁仿真计算4个模块,具体流程如图 2所示。
 |
| 图 2 隐身飞机动态RCS仿真流程 Fig. 2 Simulation process of stealth aircraft dynamic RCS |
| 图选项 |
仿真步骤如下:
步骤1??读取隐身飞机性能参数。
步骤2??确定既定航迹下飞机在雷达坐标系中的实时位置,计算二维飞行视线姿态角。
步骤3??利用雷达坐标系和机体坐标系的转换关系,解算时变的视线姿态角。
步骤4??利用视线姿态角进行电磁计算,得到动态RCS序列。
1.4 模块设计
1.4.1 航迹模型设置 隐身飞机飞行航迹用侧站盘旋[10]模型进行模拟,模型条件设置如下:保持盘旋状态的滚转角始终是η=30°;维持盘旋的飞机仰角δ<5°;隐身飞机具有超声速、高空巡航能力。
侧站盘旋航迹参数设置具体如表 1所示。
表 1 航迹参数设置 Table 1 Trajectory parameter setting
| 参数 | 数值 |
| 巡航速度v/Ma | 1.4 |
| 巡航高度H/km | 10 |
| 盘旋半径R/km | 40 |
表选项
依据航迹参数,隐身飞机的飞行状态及地面雷达的位置在三维直角坐标系中如图 3所示。
 |
| 图 3 侧站盘旋航迹 Fig. 3 Spiral flying trajectory |
| 图选项 |
1.4.2 飞机受力分析 图 4给出了隐身飞机保持侧站盘旋状态的受力情况。
 |
| 图 4 隐身飞机受力分析 Fig. 4 Force analysis of stealth aircraft |
| 图选项 |
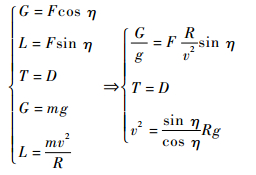
本文建立了侧站盘旋的动力学方程组:
 | (1) |
式中:T为发动机推力,kg·m/s2,实际飞行过程中的发动机推力T必然产生力量损失,维持巡航飞行高度的发动机耗力是最大推力的70%左右;D为空气阻力,kg·m/s2,其是巡航速度、大气密度和机翼面积的函数,在同一高度的飞行平面上,发动机推力与空气阻力始终平衡;F为气动升力,kg·m/s2;L为盘旋飞行的向心力,kg·m/s2,其是F的水平分量;G为重力,kg·m/s2,其与F的垂直分量相平衡;m为飞机质量,kg;g为一般重力加速度,m/s2。
1.4.3 时变姿态解算 1) 坐标系定义
① 雷达坐标系(OR-XRYRZR)。以地面雷达质心为坐标原点OR,坐标轴规定如下:XR轴沿OR所在的纬度线指东,YR轴沿OR所在的经度线指北,XR、YR、ZR满足右手法则。
② 机体坐标系(OT-XTYTZT)。以飞机质心为坐标原点OT,OTXT轴指向机体对称平面的机头方向,OTYT轴垂直机体平面向左,XT、YT、ZT同样满足右手法则,如图 5所示。
 |
| 图 5 机体坐标系示意图 Fig. 5 Schematic of aircraft body coordinate systems |
| 图选项 |
图 5中,机体坐标系中的φ、θ和η分别为飞机的方位角、俯仰角和滚转角,具体可由雷达坐标系与机体坐标系的转换关系及飞机的具体位置解算。
2) 坐标系转换
图 6给出了视线方位角φ(t)和视线俯仰角θ(t)的解算过程。
 |
| 图 6 坐标系转换示意图 Fig. 6 Schematic of coordinate system conversion |
| 图选项 |
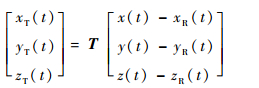
雷达坐标系与机体坐标系的转换关系[10, 13-15]为
 | (2) |
式中:(x(t), y(t), z(t))表示雷达坐标系中任意一点的位置;(xT(t), yT(t), zT(t))为点(x(t), y(t), z(t))相应在机体坐标系中的坐标位置;(xR(t), yR(t), zR(t))为飞机所处位置在雷达坐标系中的坐标;T为雷达坐标系到机体坐标系的转换矩阵。
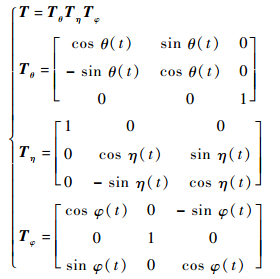
根据2个坐标系中方位角、俯仰角和滚转角逆时针旋转变换关系,转换矩阵T可表示为
 | (3) |
式中:Tη为滚转角从雷达坐标系逆时针旋捉机体坐标系中的转换矩阵;Tθ为俯仰角从雷达坐标系逆时针旋捉机体坐标系中的转换矩阵;Tφ为方位角从雷达坐标系逆时针旋捉机体坐标系中的转换矩阵。
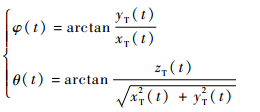
将雷达坐标原点(0, 0, 0)代入式(4),则时变的视线姿态角表示为
 | (4) |
时变视线姿态角解算结果如图 7所示。
 |
| 图 7 时间序列上视线姿态角的变化 Fig. 7 Variation of attitude angle to line of sight in time sequence |
| 图选项 |
隐身飞机沿既定航迹飞行一圈所需时间为528 s。每一时刻分别对应一组视线方位角和视线俯仰角,描述飞机的即时姿态。
1.4.4 电磁仿真计算 计算平台为FEKO软件和MATLAB软件。
计算条件如下:工作频率为5.8 GHz;极化方式为HH;方位角范围为0°~360°;俯仰角范围为-90°~90°;步进角度为1°。
计算方法如下:
1) 在电磁计算平台FEKO中设置仿真条件,计算某型隐身飞机的全空域静态RCS数据。
2) 时变的视线姿态角构成二维数组,在对应静态RCS数据库中提取即时姿态的RCS值。
3) 利用MATLAB软件编程,按时变视线姿态角对应的顺序组合即得到动态RCS序列。
图 8给出了飞机侧站盘旋一周,即0~528s内动态RCS的仿真结果。
 |
| 图 8 隐身飞机动态RCS序列 Fig. 8 Dynamic RCS series of stealth aircraft |
| 图选项 |
结果表明:邻近时间的RCS起伏变化幅度大,没有一定的函数规律可循,起伏随机性较强,说明微小的姿态变化能够导致飞机隐身性能的强弱之别。在0~528 s的时间内,RCS起伏幅度在-39.02~31.70 dBsm范围内。
2 雷达探测性能 雷达探测性能一般由探测距离和探测概率量化评估。理论上分析,自卫干扰目的在于采取噪声压制方式,提高信干比,缩减雷达探测距离范围,减小雷达探测概率,进而影响探测性能。因此,评估隐身飞机自卫干扰对雷达性能的影响,需从探测距离和探测概率进行量化研究。
2.1 雷达探测距离 雷达探测距离方程[1, 4]具体描述了探测距离的相关因子及其相关关系。雷达探测距离在噪声随机性的影响下,一般是一个统计值,无明确的数值特性。对于某部雷达而言,探测隐身飞机的距离范围具有时间上的变换性和空间上的随机性特点。
1) 正常飞行状态下的雷达探测距离
在设定检测门限、给限、给定虚警概率的前提下,正常飞行状态(无自卫干扰)的时变雷达探测距离为
 | (5) |
式中:Pt为发射机的峰值功率,kg·m2/s3;Gt=Gr为收发一体天线的主瓣增益;σt为t时刻隐身飞机的动态RCS值,m2;λ为雷达工作波长,m;k为玻尔兹曼常数,kg·m2·s-2·K-1;T0为内部噪声温度,K;B为接收机带宽,s-1;Fn为接收机的噪声系数,dB;Ls为雷达各部分损耗引入的损失系数, dB;(S/N)min为雷达检测信号所需的最小可检测信噪比, dB。
2) 自卫干扰状态下的雷达探测距离
自卫干扰条件下的时变雷达探测距离[1]为
 | (6) |
式中:Pj为干扰设备发射功率,kg·m2/s3;Gj为干扰设备天线增益, dB;G′r为雷达在干扰方向上的接收天线增益, dB;Rj(t)为t时刻隐身飞机的自卫干扰距离,m;Δfr为雷达接收带宽,s-1;Ts为干扰设备发射机损耗, dB;γj为干扰信号相对雷达天线的极化损失,一般取γj=0.5;Δfj为干扰信号带宽,s-1;(S/J)min为最小可检测信杂比, dB。
自卫干扰必须充分考虑烧穿距离这一限制因素。烧穿距离[16-17]是指在干扰条件下,雷达信号质量足够探测跟踪目标时,两者之间的距离。
烧穿距离公式均采用dB形式处理各种物理量,距离以km违位,频率以MHz违位,雷达截面积以m2违位。
对单基地雷达而言,发射机和接收机是一体设计的,共用同一天线。因此,接收机接收到的信号功率[17]为
 | (7) |
式中:S为接收机输入端的信号功率,dB;Ff为发射信号频率,MHz;σ为目标的RCS值。
进入接收机输入端的干扰功率[17]为
 | (8) |
式中:J为接收机接收端的干扰功率,dB。
考虑隐身飞机自卫干扰模式,干扰信号与目标回波信号以相同角度进入天线,此时有:Dj=Rj,G′r=Gr,则信干比表示为
 | (9) |
整理后为
 | (10) |
则烧穿距离[16]dj为
 | (11) |
对于自卫干扰而言,满足dj<Rj,噪声压制干扰模式才能有效发挥作用。
自卫干扰信号通常进入雷达主瓣方向,根据式(6)可知,当G′r=Gr,Rj(t)=Rt(Rt为隐身飞机与雷达的实时空间距离)时,图 9给出了自卫干扰情况下,雷达探测距离范围变化的示意图。
 |
| 图 9 自卫干扰状态下的雷达探测距离范围变化示意图 Fig. 9 Schematic of radar detection range variation under self-defense jamming condition |
| 图选项 |
图 9表明,飞机实施自卫干扰对雷达探测距离进行干扰压制,干扰信号对准雷达主瓣时,压制效果最好。此时,雷达的最小探测距离为Rmin,最大探测距离为Rmax。自卫干扰状态下的雷达探测范围是以雷达为中心、雷达和飞机的连线为轴、两边对称的心状曲线,所在区域称为飞机作战的暴露区;飞机自卫干扰致使雷达探测范围缩减的区域是飞机的干扰压制区,也是飞机自我保护的最佳掩护区。
2.2 雷达探测概率 1) 信噪比和信干比
对式(5)进行变换,可得信噪比计算公式为
 | (12) |
对式(6)进行变换,可得信干比计算公式为
 | (13) |
文献[2, 7]给出了自卫干扰条件下雷达系统中信号与干扰和噪声之和的比值:
 | (14) |
2) 探测概率模型
雷达探测概率Pd是在信号加噪声背景下信号的包络r(t)超过门限电压VT的概率,即目标被探测到的可能性。接收信号是信号和噪声的叠加,服从Rice分布(均值为A,方差为σn2),根据Rice分布的概率密度函数,雷达探测概率可以表示为
 | (15) |
式中:I0(·)为修正的第一类零阶贝塞尔函数。
结合检测门限
 | (16) |
式中:Q称为Marcum Q函数[18],是一种积分运算。
文献[18]中为了避免式(16)中复杂的数值积分,简化Pd运算,North提出了一个非常准确的近似计算公式,如下:
 | (17) |
式中:erf(ξ)为补余误差函数,其计算公式为
 | (18) |
若对地面防空系统实施自卫干扰,则用S/(N+J)代替式(17)中的信噪比S/N即可得到自卫干扰条件下的雷达探测概率为
 | (19) |
3 仿真分析 3.1 仿真流程 步骤1??结合飞机正常飞行状态和自卫干扰状态的雷达探测距离公式(5)和公式(6),利用动态RCS序列计算0~528 s内时变的雷达探测距离。
步骤2??设定检测门限(Pfa=10-6),根据式(12)和式(13)的计算方式,仿真确定0~528 s内信噪比和信干比的具体值。
步骤3??凭借式(19)给出的雷达探测概率与信噪比、信干比和虚警概率的函数关系,计算飞机在2种飞行状态下的时变雷达探测概率。
步骤4??比较2种飞行状态下,雷达探测范围和瞬时探测概率的时变情况,并给出飞机自卫干扰对雷达探测性能影响的具体结论。
3.2 结果分析
3.2.1 雷达探测距离 1) 正常飞行状态下的雷达探测距离
普通雷达参数设置的约束条件如下:①主要依据现役地面预警雷达的性能参数水平,各个参数的设置力求贴近客观、实际的数值;②参数设置需满足隐身飞机在无自卫干扰状态下,侧站盘旋飞行能够被雷达探测发现这一条件,以便后续比较研究;③参数设置要基于飞行航迹模型设置,以便构建合理的仿真环境。
具体设置如表 2所示。
表 2 雷达参数设置 Table 2 Radar parameter setting
| 参数 | 数值 |
| 发射功率/kW | 100 |
| 发射天线增益/dB | 42 |
| 接收天线增益/dB | 42 |
| 玻尔兹曼常数/(kg·m2·s-2·K-1) | 1.38×10-23 |
| 内部噪声温度/K | 290 |
| 接收机带宽/MHz | 5 |
| 噪声系数/dB | 3 |
| 系统损耗/dB | 5 |
| 最小可检测信噪比/dB | 20 |
表选项
图 10给出了隐身飞机在正常飞行(无自卫干扰)状态下盘旋飞行一周的雷达探测距离范围。
 |
| 图 10 正常飞行状态下的雷达探测距离范围 Fig. 10 Radar detection range under normal flight conditions |
| 图选项 |
飞机侧站盘旋一周的过程中,动态RCS以视线方位角周向散射,雷达探测距离范围随不同视线姿态角对应的RCS起伏变化,变化范围在300 km以内。且飞机距雷达的实际时变距离在固定航迹上时变,范围在22.36~100.01 km之间。由图 10可知,雷达探测距离在部分时间内是远超飞机实际距离的,这意味着雷达可能探测、跟踪到目标,使飞机处于危险境地。
2) 自卫干扰状态下的雷达探测距离
自卫干扰设备的仿真参数设置需满足如下条件[16-17]:①压制式干扰的干扰频宽一般是雷达接收机带宽的2~5倍;②干扰功率和干扰天线增益不易太大,以确保干扰时段隐身飞机的隐身性能不会变差;③压制式干扰的信干比通常达到10 dB以上;④参数设置需确保自卫干扰能够达到干扰效果;⑤考虑烧穿距离的限制。
具体设置如表 3所示。
表 3 干扰设备参数设置 Table 3 Jammer equipment parameter setting
| 参数 | 数值 |
| 干扰功率/W | 100 |
| 干扰天线增益/dB | 10 |
| 干扰频宽/MHz | 10 |
| 极化损失 | 0.5 |
| 干扰设备总耗/dB | 4 |
| 雷达接收带宽/MHz | 5 |
| 信干比/dB | 25 |
表选项
自卫噪声压制干扰必须考虑隐身飞机满足烧穿距离的限制。图 11给出了隐身飞机侧站盘旋一周过程中,飞机实际距离和干扰烧穿距离的时变情况。
 |
| 图 11 飞机实际距离和干扰烧穿距离的时变情况 Fig. 11 Time-varying situation of airplane actual range and jamming burnthrough range |
| 图选项 |
显然,dj<Rj。所以隐身飞机侧站盘旋过程中进行的自卫干扰距离满足烧穿距离要求,且干扰方式主要为噪声压制干扰。
自卫干扰时,雷达的探测距离范围与目标RCS密切相关,只是在干扰信号的掩盖和压制下,雷达探测距离范围将受到影响。图 12为自卫干扰状态下的雷达探测距离范围变化。
释放自卫干扰后,雷达探测距离范围基本被压制缩减至30 km以内。且每个周向角度对应的雷达探测距离都是干扰主瓣对准雷达的最短压制距离Rmin。如图 12所示,自卫干扰的结果是雷达探测距离低于飞机的实际时变距离,雷达将无法正常探测、跟踪目标,飞机突防安全。
 |
| 图 12 自卫干扰状态下的雷达探测距离范围 Fig. 12 Radar detection range under self-defense jamming conditions |
| 图选项 |
3.2.2 雷达探测概率 求解飞机有无自卫干扰状态的雷达探测概率变化,需要掷自卫干扰前系统信噪比和自卫干扰后系统信干比的时变数值。
1) 信噪比和信干比
已知信噪比和信干比均是目标RCS的函数,又隐身飞机的RCS在飞行过程中是动态变化的,是固定航迹中时间序列上变化的动态过程。根据式(12)和式(13)的计算方式,隐身飞机盘旋飞行时,信噪比和信干比在时间序列上的动态变化如图 13所示。
 |
| 图 13 时间序列上信噪比与信干比的变化 Fig. 13 Variation of signal to noise ratio and signal to jamming ratio in time sequence |
| 图选项 |
与图 8相比较,图 13中信噪比和信干比在时间序列上的变化与动态RCS能够保持一致。对于设定的常规体制雷达而言,在无自卫干扰的情况下,信噪比变化范围在-40~40 dB左右;在自卫干扰状态下,信干比的变化范围在-90~-10 dB左右。
2) 瞬时雷达探测概率
在已知信噪比的基础上,设定检测门限(Pfa=10-6),求解时间序列上的雷达瞬时探测概率,如图 14(a)所示。
 |
| 图 14 雷达瞬时探测概率 Fig. 14 Instantaneous detection probabilities of radar |
| 图选项 |
在隐身飞机自卫干扰状态下,信噪比与雷达自身的体制属性有关,而信干比则反映干扰设备的干扰性能。欲计算自卫干扰状态下,时间序列上的雷达瞬时探测概率,需要利用式(14)对信(噪声+干扰)比进行求解,然后在同一检测门限下,得到结果如图 14(b)所示。
比较分析图 14(a)、(b)可知:
1) 隐身飞机盘旋飞行过程中有无进行自卫干扰,对时间序列上雷达的探测概率影响较大。正常飞行状态下,飞机在0~528 s内能够被雷达探测到,如图 14(a)所示,当雷达扫描次数增多,累积探测概率将增加,飞机面临的危险系数也将提高;自卫干扰状态下,0~528 s内的瞬时探测概率小,时间累积性较差,累积探测概率低,飞机的安全性将大大提高。
2) 隐身飞机进行自卫干扰的前提是自身面临被雷达发现的危险时,飞机自我保护的干扰行动。与普通战斗机自卫干扰不同,隐身飞机具有良好的隐身性能,雷达发现目标的作用距离小,在考虑烧穿距离限制条件下,隐身飞机可抵近雷达实施干扰压制,其压制效果不仅能够确保自身安全,同时也可为己方战机提供掩护区。
4 结论 本文研究了隐身飞机自卫干扰性能问题。在侧站盘旋航迹下,首先利用飞机的飞行姿态和坐标系转换关系确定了动态RCS序列;然后依据雷达探测距离公式和探测概率模型,比较分析了正常飞行和自卫干扰2种状态下,对雷达探测性能的影响。
1) 隐身飞机自卫干扰能够缩减雷达探测距离范围。正常飞行时,飞机部分时间处于探测范围之内,面临被探测、跟踪的危险;自卫干扰时,雷达探测距离始终低于实际飞行距离,能够安全突防。
2) 隐身飞机自卫干扰能够降低雷达探测概率。正常飞行时,飞机瞬时探测概率高,累积探测性能强;自卫干扰时,瞬时探测概率非常低,累积探测性能差。
上述结论说明,隐身飞机自卫干扰降低了雷达探测性能,提高了飞机的突防生存力,且在实战中为作战双方积累隐身与反隐身的对抗经验提供了参考。
参考文献
| [1] | 宋海方, 肖明清, 吴华, 等. 不同机载电子干扰条件下的飞机敏感性模型[J].航空学报, 2015, 36(11): 3630–3639. SONG H F, XIAO M Q, WU H, et al. Generic model of aircraft susceptibility to different airborne electronic counter measures[J].Acta Aeronautica et Astronautica Sinica, 2015, 36(11): 3630–3639.(in Chinese) |
| [2] | 郭凤娟, 张安, 曹璐. 自卫干扰对无人机敏感性的影响研究[J].计算机工程与应用, 2011, 47(2): 220–222. GUO F J, ZHANG A, CAO L. Research on influence of SSJ on sensitivity of UAV[J].Computer Engineering and Applications, 2011, 47(2): 220–222.(in Chinese) |
| [3] | 杨哲, 李曙林, 周莉, 等. 机载自卫压制干扰和箔条干扰下飞机生存力研究[J].北京理工大学学报, 2013, 33(4): 375–379. YANG Z, LI S L, ZHOU L, et al. Study of aircraft survivability under the conditions of self-defense jamming and chaff jamming[J].Transactions of Beijing Institute of Technology, 2013, 33(4): 375–379.(in Chinese) |
| [4] | 唐政, 高晓光, 张莹. 机载自卫有源压制干扰效果评估模型研究[J].系统工程与电子技术, 2008, 30(2): 236–239. TANG Z, GAO X G, ZHANG Y. Research on the model evaluating the efficiency of the airborne active sell-defense jamming system[J].Systems Engineering and Electronics, 2008, 30(2): 236–239.(in Chinese) |
| [5] | 肖强, 张宏伟, 韩壮志, 等. 机载有源自卫干扰下雷达探测效能仿真[J].计算机系统应用, 2014, 23(11): 186–191. XIAO Q, ZHANG H W, HAN Z Z, et al. Simulation of radar detection effectiveness under airborne active self-defense jamming[J].Computer Systems Applications, 2014, 23(11): 186–191.DOI:10.3969/j.issn.1003-3254.2014.11.035(in Chinese) |
| [6] | 平殿发, 刘志远, 张韫. 机载雷达有源干扰扇面分析与估算[J].雷达科学与技术, 2012, 10(4): 443–447. PING D F, LIU Z Y, ZHANG W. Analysis and estimation of airborne radar active jamming sector[J].Radar Science and Technology, 2012, 10(4): 443–447.(in Chinese) |
| [7] | SHEN T Y, DING J J, DING Y, et al.A method of detection performance modeling in jamming condition based on radar network system[C]//Proceedings of the 2011 IEEE CIE International Conference on Radar.Piscataway, NJ:IEEE Press, 2011:1366-1369.http://ieeexplore.ieee.org/document/6159812/ |
| [8] | 陈世春, 黄沛霖, 姬金祖. 从探测概率的角度评价飞机的隐身性能[J].航空学报, 2015, 36(4): 1150–1161. CHEN S C, HUANG P L, JI J Z. Evaluating aircraft's stealth performance from the perspective of detection probability[J].Acta Aeronautica et Astronautica Sinica, 2015, 36(4): 1150–1161.(in Chinese) |
| [9] | ZHOU C, ZHANG X K, ZHUANG Y Q, et al.Research on the influence of tactic maneuver of target detection[C]//Proceedings of 2013 Cross Strait Quad-regional Radio Science & Wireless Technology Conference.Piscataway, NJ:IEEE Press, 2013, 115:345-348.http://ieeexplore.ieee.org/document/6657425/ |
| [10] | 戴崇, 徐振海, 肖顺平. 非合作目标动态RCS仿真方法[J].航空学报, 2014, 35(5): 1374–1384. DAI C, XU Z H, XIAO S P. Simulation method of dynamic RCS for non-cooperative targets[J].Acta Aeronautica et Astronautica Sinica, 2014, 35(5): 1374–1384.(in Chinese) |
| [11] | 芮锡. 无人作战飞机射频传感器系统隐身技术发展与思考[J].电讯技术, 2015, 55(5): 580–584. RUI X. Stealth technology for RF sensor system of UCAV:Development and thought[J].Telecommunication Engineering, 2015, 55(5): 580–584.(in Chinese) |
| [12] | 肖志河, 高超, 白杨, 等. 飞行器雷达隐身测试评估技术及发展[J].北京航空航天大学学报, 2015, 41(10): 1873–1879. XIAO Z H, GAO C, BAI Y, et al. Aircraft radar stealth test and evaluation technology and progress[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(10): 1873–1879.(in Chinese) |
| [13] | 石章松, 刘忠, 王航宇, 等. 目标跟踪与数据融合理论及方法[M].北京: 国防工业出版社, 2010: 8-30. SHI Z S, LIU Z, WANG H Y, et al. Method and theory of target tracking and data fusion[M].Beijing: National Defense Industry Press, 2010: 8-30.(in Chinese) |
| [14] | 戴崇, 徐振海, 肖顺平. 雷达目标动静态RCS特性差异分析[J].信号处理, 2013, 29(9): 1256–1263. DAI C, XU Z H, XIAO S P. Analysis for differences between dynamic and static RCS characteristics of radar target[J].Journal of Signal Processing, 2013, 29(9): 1256–1263.(in Chinese) |
| [15] | 刘佳, 方宁, 谢拥军, 等. 姿态扰动情况下的目标动态RCS分布特性[J].系统工程与电子技术, 2015, 37(4): 775–781. LIU J, FANG N, XIE Y J, et al. Dynamic target RCS characteristic analysis under the influence of attitude perturbation[J].Systems Engineering and Electronics, 2015, 37(4): 775–781.DOI:10.3969/j.issn.1001-506X.2015.04.09(in Chinese) |
| [16] | 修继信, 李东海. 影响雷达烧穿距离的要素分析[J].舰船电子对抗, 2008, 31(4): 51–54. XIU J X, LI D H. Analysis on the elements influencing the radar burnthrough range[J].Shipboard Electronic Countermeasure, 2008, 31(4): 51–54.(in Chinese) |
| [17] | ADAMY D. EW101: 电子战基础[M]. 王燕, 朱松, 译. 北京: 电子工业出版社, 2013: 118-124. ADAMY D.EW101:A first course in electronic warfare[M].WANG Y, ZHU S, translated.Beijing:Publishing House of Electronics Industry, 2013:118-124(in Chinese). |
| [18] | MAHAFZA B R, ELSHERBENI A Z. 雷达系统设计MATLAB仿真[M]. 朱国富, 黄晓涛, 黎向阳, 等译. 北京: 电子工业出版社, 2009: 52-82. MAHAFZA B R, ELSHERBENI A Z.MATLAB simulations for radar system design[M].ZHU G F, HUANG X T, LI X Y, et al, translated.Beijing:Publishing House of Electronics Industry, 2009:52-82(in Chinese). |
