���������Щ�����о��������һ��������Դ��λϵͳ��ʹ���ܹ��Խ�������Դ��Ч�ʡ��߾��ȶ�λ��ͬʱʵ���豸�ļ������豸�������ɱ���
1 ϵͳģ�� ������Ƶĵ����ߵ�ͨ���˶��ϳ�������Ԫ�Ľ�����λϵͳ��Ϊ2�����֣��źŽ��տ��Ʒ�ϵͳ�ͽ����źŴ�����ϵͳ��ϵͳ�Ĺ���ԭ�����£�
��ϵͳ����һ�Ľ���������������ͨ�����ջ��ϣ��źŽ��տ��Ʒ�ϵͳͨ�����������˶����γ�����ֱ�����У��������տռ��еĵ���ź�[8]��ͬʱ��ϵͳͨ�����Ƶ�ͨ�����ջ��IJ���Ƶ���Լ�����ʱ�����Ȳ�������������˶������Ŀռ����ģ�ͣ�ʵ���˶Է���Դ�źŵIJ����������źŴ�����ϵͳ����������Ϣ���뵽��ض�λ�㷨�У�����ʵ�ֶԽ�������Դ�źŵĶ�λ��
�����ߵ�ͨ��������λϵͳ�ṹ��ͼ 1��ʾ������������һ��ֱ�߹�����˶������˶����뵽��d������ͣ�½���K�β������ò������Ϊ�������ߵĵ�Ч��Ԫλ�ã���ͼ 1�кڵ���ʾ�������ظ�ֱ���˶��γ�M����Ч��Ԫ��������������Ԫ��ΪM�������жԽ�����Ƶ�������ź�Դs0(t)���н��գ��ź�Դ��Ƶ��Ϊf0������Ϊ��0���ź�Դ��ο���Ԫ1�ķ���н�Ϊ�������ҵ��ο���Ԫ1�ľ���Ϊr������ͨ����һͨ�������źţ����ٽ��źŽ��д�������ʵ���ź�Դ��λ��
 |
| ͼ 1 �����ߵ�ͨ��������λϵͳ Fig. 1 Single antenna and single channelnear-field location system |
| ͼѡ�� |
���ź�Դ��λ�����۷����У�ͨ��������Դ������ź���խ���źţ��ɱ��ڿ�֪���������˶���ÿһ����Ч��Ԫʱ�������K�β�������ÿ�β������Ϊts�����ߴ�һ����Ԫ�˶�����һ��Ԫ��ʱ��Ϊt0������Ԫ���Ϊd�����ߵ��˶��ٶ�Ϊd/t0��
��ͬ��ʵ�����е�Զ����λ�������ǵ����ߵ�ͨ���˶��������У��ҽ����źŵĵ��ﲨǰΪ���沨�����Բ�ͬ���ģ���ͬ��Ԫ���յ����ź�֮���ʱ���ӳٲ�һ������Ҳ����ζ����λ�ӳٲ�Ϊ�̶�ֵ��������Ϊ���ӳ���3���������[9]������ʱ�����ء��˶�ʱ�����غ���Ԫ�������ء����˶��ϳ�����ֱ�����н��յ������ź�дΪʸ����ʽ���£������˶�����m����Ԫ���е�k�β������յ����ź�Ϊ
 | (1) |
����
 | (2) |
 | (3) |
ʽ�У�rm Ϊ����Դ��m��������Ԫ�ľ���,m=1,2,��,M,r1=r��tmkΪ�����˶�����m����Ԫ���е�k�β�������Ҫ��ʱ�䣻n(t)Ϊ������
�����������˶��������е�ϵͳģ�ͺ�������MUSIC�㷨���źŽ��нǶȹ��ƣ����ǽϳ��õ������������н��ж�λ�ķ���[10]������MUSIC�㷨��λͨ����Ҫȷ������λԴ��������ͬʱ����MIUSIC�㷨���ж�λʱ��Ϊ�������ź���������ͳ�Ʋ�������ԣ���Ҫ�ϴ�Ŀ����������ڶ���IJ������������IJ���ʱ��������ɵ��ӳ٣�����������ľ��̶ȶԶ�λ���Ӱ��ϴ���Ŀ�����Ҳ��������������������ʵ��Ӧ���У���Щ��������MUSIC�㷨��λ�������ԡ�
ѹ����֪(CS)�ǽ������������һ���źŲ�������[11]������˼����ֻҪ�ź���ij���任����ϡ��ģ��Ϳ��Բ���Զ�����ο�˹�ض��ɵIJ����ʽ��в����������㷨�ɲ���ֵ�ع�ԭʼ�ź�[12]��
��MUSIC�㷨�У���Ҫ�Ա���������п���ľ��Ȳ�����ʵ�ʱ���������ֻ������λ���ϵ��ź���Ŀ���źţ�����λ����Ϊ���õı����źż�������Ϣ����ͼ 2��ʾ��
 |
| ͼ 2 ������λ�ռ�ϡ����ʾ��ͼ Fig. 2 Schematic diagram of spatial sparsityof near-field location |
| ͼѡ�� |
�����Ŀ���ź��ڿռ�����ϡ��ֲ��ġ�������ѹ����֪�����ź�ϡ���Ե�ǰ����������˿�������ѹ����֪���ۣ��ý��ٵIJ������ݶ�Ŀ���źŽ��ж�λ��
����ÿ��������Ԫ��ֻ����һ�β�������MUSIC�㷨��ȣ�һ�β������ڲ������ÿ��������Ԫ��β�����ɵIJ���ʱ��������˿��Բ�פͣ�����������������ʱ���ӳ����ؿ���������������ϵͳ�������ԣ�ͬʱ���Դ�������������
��ʱ�����˶�����m����Ԫʱ�����õ��Ĺ���Ŀ���źſռ�����������Ϊ
 | (4) |
ʽ�У�tmΪ�����˶�����m����Ԫ��������ʱ�䡣
�������������һ��Ԫ�ĽǶȵ�������Ϊi�ݣ��������������һ��Ԫ�ľ����������Ϊj��,�� N=ij�������˱���������ܴ��ڵ�Ŀ��λ����������Ӧ��Ŀ���źſռ�����S=[s1,s2,��,sN]T��
��ռ�����ʵ����G������Դ��N��G������S�д���G���ϴ�ֵ����Ӧ���ڵ�G��Ŀ���źţ����Ĵ�С������Ӧ�źŵķ���ֵ��������Ŷ�Ӧ�˽����ź����һ��Ԫ�IJ�ͬ�Ƕȼ����롣����N-G��ֵ������Ŀ������ı�����������С��Ϊ0������ʽ(4)�����н����źŵ���ѧģ��Ϊ
 | (5) |
ʽ�У�XΪM��1ά��������M�����������ϲ�פͣ�����õ������ݾ���;��ΪM��Nά��������ʾʵ����M��������Ԫ�����ڵ��Ͻ����˲�פͣ���������õ���������X������i(1��i��M)�����ڵ����ڵ������������Ϊj(1��j��N),����(i,j)=1������Ϊ0����Ϊ����ʸ����AΪN��Nά�����䶨��Ϊ
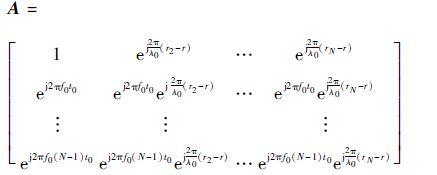 | (6) |
A��ʾ����S���������о����൱�ڼ���N����Ԫ�����ж�����S�����������������˿ռ���ı任��
���Կ�������ʽ(5)���������Է�������˵������ѹ����֪���ۣ�����ͨ��һ�����ع������õ��ռ�ϡ������S��G��Ŀ���źŵ�λ�����С��
�����е��о��У�Candes��Tao[13]֤�����ź��ع������������Сl0�������⡣����Сl0����������һ�����Ż����⣬Ҫ�������п��ܵĽ⣬��NP-hard ���⣬Ŀǰ��û�н�Ϊ��Ч���㷨������ͨ�������С��l1����������S�Ľ������Ž⡣�������Ϸ��������ý��յ��ĵ�ʱ�����н�������X���Լ�ѹ����֪�㷨������ʵ�ֿռ�λ�õĶ�λ������B=��AΪ�ָ�����λģ�ͣ�
 | (7) |
ʽ�У���Ϊ������ˮƽ��صIJ�����
����������ת��Ϊһ���Ż����⣬����ͨ�����Թ滮������⡣����ƥ����(OMP)�㷨�ǽ�Ϊ���õ�һ���ع��㷨������ԭ���ǽ����ϡ������S������ת��Ϊ���о����в�����Ϲ��̵��е�����[14]��OMP��֤��ÿ�ε����������ԣ�ֻҪ�����������࣬�������Խϸߵĸ���ȷ���ع��ź�[15]��
����OMP���ع���������������ϡ���G��أ�����Ҫ��֪ϡ��ȡ��ڱ��ĵ�Ӧ���У�ϡ���ΪĿ���źŵ�����G������λ������Ե���δ֪Ŀ��Դ���Ȳ�֪��Ŀ��λ�ã�Ҳ��֪��Ŀ����������������OMP�㷨���иĽ���ʹ��������Ŀ������δ֪�Ķ�λ���趨�Ա����ź�Ϊ��ֵ�ĵ���������ֹ������ÿ������ʹBS��ӽ�X�ĵ�λϡ����X-BS��С��lϡ������X��BS���òв�X��,���ε�������ֱ���ﵽ��ֹ�����������в�����趨�ı����ź���ֵʱ����ʱ���д��ڵ�Ŀ��Ϳ��Ա�����������˿�����ֹ������
2 ������֤ ���ݵ�1�ڵ�ϵͳ����ģ�ͣ����Ľ����˷�����֤���豻���������һ��Ԫ�Ƕȡ�����ֱ�Ϊ{-90��,90��}��{0.5 m,4.0 m}������Ŀ��Ƶ��Ϊ300 MHz������Ϊ1���Ƕ�����ڵ�һ��ԪΪ10�㣬����Ϊ1.75 m,��������Ϊ��˹�������������Ϊ20 dB������ȫ��������ֱ�������˶���ÿ������d=0.5��ͣ�½��в�������Ϊ������ͣ��������������Ԫ����Ϊ20����Ԫ�������˶�ʱ��t0=5 s��ÿ��������Ԫ���IJ���������Ϊ10������ʱ����ts=1 s������MUSIC�㷨�õ��Ķ�λ�����ͼ 3��ʾ��
 |
| ͼ 3 MUSIC�㷨��λ��� Fig. 3 Location result of MUSIC algorithm |
| ͼѡ�� |
�ӷ��������Կ���������Ŀ��ĽǶȶ�λȷ�������˶��������ж�λ������ϵͳģ������ȷ��
����������5��ľ��Ƚ������������һ��Ԫ�ĽǶȻ��ֳ�36�ݣ���N��=36����0.25 m�ľ��Ƚ������������һ��Ԫ�ľ��뻮��Ϊ15�ݣ���Nr=15��N=N��Nr=540��������֪����һ��Ŀ���źţ���������ϡ���GΪ1����ȫ��������ֱ�������˶���פͣ�������������䡣��Ϊ��Ԫ�������˶�ʱ��t0=5 s������ʱ����ts=1 s�������˶����ٲ�פͣ�����ÿ��5���������ȡ1����Ϊ������Ԫλ�ô��������������ѹ����֪���OMP�㷨�õ��Ķ�λ�����ͼ 4��ʾ��
 |
| ͼ 4 ѹ����֪�㷨��λ��� Fig. 4 Location result of compressive sensing algorithm |
| ͼѡ�� |
�ӷ��������Կ�����ͬMUSIC�㷨һ�������㷨Ҳ���ԽϺõض�λĿ��Դ�ĽǶȣ���������û����ÿ����Ԫ��פͣ����β������൱����ÿ������������ֻ����һ�β�����������ʽ(1)���ɲ����ӳ�ʱ��������ɵ���λ��������������ԶԶС��MUSIC�㷨��
�����������Ŀ���źŸ�����Ϊ3�����Ƕ����������ڵ�һ��Ԫ�ֱ�Ϊ{-10��,10��,35��}��{2.25 m,1.75 m,3.00 m}������Ŀ���źŸ���δ֪�������������䡣����ѹ����֪��ϱ��ĸĽ�����ź��ع������õ��Ķ�λ�����ͼ 5��ʾ��
�ӷ��������Կ��������øĽ�����ź��ع��������Խ�ȷ�ع���Ŀ���źŸ�����λ�á�
 |
| ͼ 5 �ź�Դ��Ŀδ֪ʱ�Ķ�λ��� Fig. 5 Location results when number of sources is unknown |
| ͼѡ�� |
����ѹ����֪���ۣ����ڹ̶�ϡ���G��Nά��ɢ�ź�S�������ڵ�����M��Glb$\left( {{N \over G}} \right)$ʱ�������Լ�����ʻָ�ϡ�������������ڲ�ͬ�Ľڵ����������½��ж�η���ʵ�飬ͳ����ɹ����ʡ�
��һ��ʵ���гɹ������ź�Դ�����Լ��źŽǶȹ���ƫ��С��������ֵʱ��Ϊ����ʵ��ɹ�����λ�ɹ���Ϊʵ��ɹ�����ռ��ʵ������ı�������
 | (8) |
����
 | (9) |
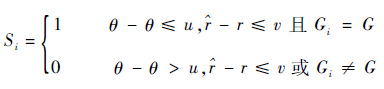
ʽ�У�Si��ֵ��ʾ��ij�ڵ�����������1��ʵ�����Ƿ��ܳɹ���λ����^Ϊ�˴ζ�λ���õ�Ŀ�����һ��Ԫ�ĽǶȣ�uΪ��λ�Ƕ�ƫ����ֵ����u=5����Ϊ�˴ζ�λ���õ�Ŀ�����һ��Ԫ���룻vΪ��λ����ƫ����ֵ����v=0.25 m��GiΪ�˴ζ�λ����Ŀ��Դ����;WΪʵ���������WΪ100�Ρ�
��ͼ 6��ʾ�����֪���ڴ�ʵ���е������ڵ�������һ������ʱ�����ķ����Ķ�λ���Ƴɹ����ʽϸߣ����Ժܺõ���ɽ�����λ���ܡ���������ʵ����Կ������ķ������������Ƶ������п����ԡ�
 |
| ͼ 6 ��ͬĿ��Դ�����ڲ�ͬ������Ԫ���µĶ�λ�ɹ��� Fig. 6 Location success rate of different source quantity under different amount of virtual array elements |
| ͼѡ�� |
3 ϵͳ�����ʵ�� Ϊ��ʹ�ö�λϵͳ�ܹ�Ӧ����ʵ�ʲ��ԣ�����������źŽ��տ��Ʒ�ϵͳ��ʵ���˽�����λϵͳ�жԿռ��ź�Դ�Ľ��ա�ͨ�����źŽ��տ��Ʒ�ϵͳӲ�������Լ��������ֵ�������о�������ܹ�ʹ������λϵͳ������ת�Ŀ���ϵͳ�������˶�λϵͳ�ṹ������ͬʱʵ�����豸�ȶ����Զ����Ľ��ա�
����ϵͳ��Ϊ3�����֣��������ģ�顢�źŽ���ģ���Լ������˶�ģ�飬��ͼ 7��ʾ��
 |
| ͼ 7 ����ϵͳģ��ͼ Fig. 7 Control system module diagram |
| ͼѡ�� |
����ϵͳ���������ģ�鷢��ָ����������˶�ģ����������������ֱ�ߵ����˶���������Ԫ�����������ģ�����źŽ���ģ�鷢��ָ�ʹ���źŽ���ģ�鿪ʼ�Կռ�����ź�Դ���в���������MUSIC�㷨ʱ�����������ݵ������ﵽҪ���źŽ���ģ�齫���ݴ������������ģ����д洢����ʱ�������ģ�齫���ж������Ƿ��˶���ͣ����������������Ԫ����������������������˶��Լ������źŽ��գ����ǣ�����Խ���������ѹ����֪�㷨ʱ���źŽ���ģ����������������ݴ��䴢�档
������ƴ���źŽ��տ��Ʒ�ϵͳ����ʵ�ʲ��ԡ���������Ϊ{-45��,45��},{0.25 m,3 m}������Ŀ��Ƶ��Ϊ900 MHz������Ϊ1���źŹ���Ϊ-10 dB��m���Ƕ�����ڵ�һ��ԪΪ30�㡣����rΪ1.25 m�������Ϊ20 dB��������Ԫ����d=0.5��������ȫ��������ֱ�������˶����ٶ�Ϊ10 m/min����Ԫ�������˶�ʱ��t0=1 s������ʱ����ts=1 s��ÿ��������Ԫ������10�Ρ����������������һ��Ԫ����Ƕ��Բ�������5�㻮��Ϊ18�ݣ����һ��Ԫ�����Բ�������0.25 m����Ϊ11�ݡ��ֱ�����MUSIC�㷨�Լ����ĸĽ����ѹ����֪�㷨�ڲ�ͬ��������Ԫ��M=5��10��12��16��20��24��28�����½��ж�ζ�λʵ�飬ÿ��Mֵ�¸�ʵ��W=20�Ρ����嶨λ��ʽΪ
 | (10) |
ʽ�У�${{\hat s}_w}$Ϊһ��ʵ��õ���Դ��λ�ã�sΪԴ��ʵ��λ�á��Ա�MUSIC�㷨�뱾�ĸĽ����ѹ����֪�㷨��λ�����,��ͼ 8��ʾ��
 |
| ͼ 8 ��ͬ�㷽���µĶ�λ��� Fig. 8 Location error of different algorithms |
| ͼѡ�� |
ͨ��ʵ�鼰���ͳ�ƿ��Կ�������������Ļ��ڵ������˶��������еĽ�����λϵͳ��ʵ��ʵ���У��������ڵ�ﵽһ������ʱ�����ԽϺõ���ɶ�λ���ұ�������������ź�ϡ����������δ֪�ź�λ�õķ�����MUSIC�㷨��Ⱦ��и��ٵ��ӳ����أ�������������ݴ���С����ʵ���У�ͬ����Ԫ��������£���������������ݽ�ΪMUSIC�㷨��1/10��
4 �� �� 1) ���������һ�ֵ������˶��ϳ����еĽ�������Դ��λ���������Թ���δ֪�ź�Դ����������λ��
2) ������������볣�õ�MUSIC�㷨��ȣ��ڱ�֤��λ���ȵ�ͬʱ����������˲������ݣ��Լ�����ʱ����ܴ�������
3) ������ƴ��λϵͳ����ʵ�ʻ����¶��ʵ�飬�������������Ƶ�ϵͳ�߱�������λ���������ڽ��������µĵ�ŷ������Դ��ⶨλ����һ���IJο����弰ʵ�ü�ֵ��
�����
| [1] | ���к�, �����. ���ӵ�Ż����ں���ЧӦ����[J].װ��ָ�Ӽ���ѧԺѧ��, 2008, 19(1): 1�C5.LIU S H, SUN G Z. Analysis of the concept and effects of complex electromagnetic environment[J].Journal of the Academy of Equipment Command & Technology, 2008, 19(1): 1�C5.(in Chinese) |
| [2] | CERRI G, DE L R, DELLA N L, et al. Fault location on shielded cables:Electromagnetic modelling and improved measurement data processing[J].IEE Proceedings-Science, Measurement and Technology, 2005, 152(5): 217�C226.DOI:10.1049/ip-smt:20045035 |
| [3] | KODALI V P.���̵�ż���:ԭ�������ԡ��������ռ������ģ��[M].�����,������,�ն���,����.����:�����ʵ������,2006:156-162.KODALI V P.Engineering electromagnetic compatibility:Principles,measurements,technologies,and computer models[M].CHEN S F,GAO Y G,SU D L,et al,translated.Beijing:People's Posts and Telecommunications Publishing House,2006:156-162(in Chinese). |
| [4] | �ִ�ϼ. ������Ϣϵͳ��ż����Բ����о�[J].�й����ӿ�ѧ�о�Ժѧ��, 2005(2): 33�C36.JIA C X. Research on electromagnetic compatibility testing of electronic information system[J].Journal of China Academy of Electronics and Information Technology, 2005(2): 33�C36.(in Chinese) |
| [5] | MICHEL M.��Ÿ����Ų鼰���Ͻ���ĵ�ż��ݼ���[M].��Ƽ,κ����,����,����.����:��е��ҵ������,2002:27-30.MICHEL M.Electromagnetic interference and electromagnetic compatibility technology troubleshooting[M].LIU P,WEI D X,ZANG R H,et al,transtated.Beijing:Mechanical Industry Publishing House,2002:27-30(in Chinese).http://www.doc88.com/p-0416182206859.html |
| [6] | MARTINEZ-LORENZO J A, RAPPAPORT C M, QUIVIRA F. Physical limitations on detecting tunnels using underground-focusing spotlight synthetic aperture radar[J].IEEE Transactions on Geoscience & Remote Sensing, 2011, 49(1): 65�C70. |
| [7] | ���ٸ�,л����,Ҷ֪��.��ͨ�����н�����Դ��λ�����о�[C]//��ʮ����ȫ���粨����ѧ���������.����:�й�����ѧ��,2013,28:404-407.CHEN S G,XIE S G,YE Z Q.Research on near field source localization for single channel array[C]//12th Chinese National Symposium on Radio Propagation.Xinxiang:Chinese Institute of Electronics,2013,28:404-407(in Chinese). |
| [8] | MARTINEZ-LORENZO J A, QUIVIRA F, RAPPAPORT C M. SAR imaging of suicide bombers wearing concealed explosive threats[J].Progress in Electromagnetics Research, 2012, 125(1): 255�C272. |
| [9] | ZENG X Y,XIE S G,HAO X C,et al.A near-field radiation source localization method based on passive synthetic arrays using single channel receiver[C]//10th Academic Forum for Graduate Students at Beihang University.Beijing:Beihang University,2014. |
| [10] | �̾���, ����, ����, ��. ǿԼ���Ż���άMUSIC��άDOA����[J].��������Ϣѧ��, 2014(5): 1113�C1118.CAI J J, BAO D, LI P, et al. Two-dimensional DOA Estimation using reduced-dimensional MUSIC algorithm with strong-constraint optimization[J].Journal of Electronics & Information Technology, 2014(5): 1113�C1118.(in Chinese) |
| [11] | BI D, XIE Y, LI X, et al. A sparsity basis selection method for compressed sensing[J].IEEE Signal Processing Letters, 2015, 22(10): 1738�C1742.DOI:10.1109/LSP.2015.2429748 |
| [12] | ��|, ������, ����, ��. ѹ����֪�ع��㷨����[J].�����뼤���, 2013, 42(S01): 225�C232.LI K, MA C W, LI Y, et al. Survey on reconstruction algorithm based on compressive sensing[J].Infrared and Laser Engineering, 2013, 42(S01): 225�C232.(in Chinese) |
| [13] | CANDES E K, TAO T. Decoding by linear programming[J].IEEE Transactions on Information Theory, 2005, 51(12): 4203�C4215.DOI:10.1109/TIT.2005.858979 |
| [14] | TROPP J A, GILBERT A C. Signal recovery from random measurements via orthogonal matching pursuit[J].IEEE Transactions on Information Theory, 2007, 53(12): 4655�C4666.DOI:10.1109/TIT.2007.909108 |
| [15] | ������, ��־��, ��־��. ����ѹ����֪�ź��ؽ�������Ӧ������ƥ�����㷨[J].�����Ӧ���о�, 2011, 28(11): 4060�C4063.BAI L Y, LIANG Z Y, XU Z J. Adaptive orthogonal multi matching pursuit algorithm for signal reconstruction based on compressive sensing[J].Application Research of Computers, 2011, 28(11): 4060�C4063.(in Chinese) |
