Ϊ����������⣬���IJ��ù���������(Process Neural Network��PNN)����Ԥ��ģ�ͣ���Ϊһ�ֽ��������ٷ�չ�����������㷨���������������ͬʱ����ʱ�ն�ά��Ϣ�������ݴ��Ժá�Ԥ�⾫�ȸߺ�����Ӧ��ǿ���ŵ㣬�Ը���ʱ��ϵͳ������/���������н�ǿ�Ľ�ģ���������������Ѿ��в���****���������������ڽ������ϵͳ״̬Ԥ�����⣬��ȡ����һϵ�е��о��ɹ�[6-10]����Щ�о��ɹ�Ϊ�����������ڸ���ϵͳ״̬Ԥ�������ϵ�Ӧ�õ춨�˼�ʵ�Ļ���������Ҫ��������Һ������������״̬Ԥ�������������������Ҫ�������Һ�����������IJ������ݶ�Ϊ��ɢ���ݣ������ù��������罨ģʱ����Ҫ����ɢ������ϳ�����������Ϊ�������룬���ڲ������ݺ��ٴ��ڽ���������ʽ�����ʱ�����һ������Ϣ��ʧ�;�����ʧ����һ��Ĺ���������ģ�Ͷ�����������ݽ���ѵ��������ṹ�̶����䣬���ܶ��»�ȡ�IJ�������������Ч���á�
����������Ȿ�����һ�ֻ��ڼ���ѧϰ�㷨����ɢ����������(Discrete Process Neural Network��DPNN)Ԥ��ģ�ͣ�����������������ѵ�����磬Ȼ����ڼ���ѧϰ�㷨�Թ������������㵽������Ȩֵ���и��£�������߹���������Ԥ�⾫�Ⱥ���Ӧ������ͨ����Һ�������������ֱ���̽���Ԥ������֤�����㷨�Ŀ����ԣ���������Ȩֵ���µĹ���������ģ�ͽ����˶Աȷ��������������ͨ���Զ�����Ȩֵ����ʹ������������и��ߵ�Ԥ�⾫�Ⱥͽ�ǿ����Ӧ������
1 ��ɢ����������Ԥ��ģ�� ��Һ���������������ȶ�����״̬ʱ������������ܵı仯���߹��Ͼ�������״̬�������ĸı�[11-13]����˿���ͨ��Ԥ��״̬�������ı仯��Ԥ�ⷢ�����Ĺ���״̬��״̬�������ı仯һ���ɴ�����������ȡ���ɽ�����Ϊһ��ʱ�����С���ˣ�Һ����������״̬Ԥ��������Թ��Ϊ״̬������ʱ�����е�Ԥ�����⡣
��ijһ������ʱ������Ϊ{xl}����Ԥ������ȼ���Ӧ����ʷ��������{xl, xl-1, ��, x1}��δ������xl+h(h>0)���й��ơ������������ӳ���ϵ��
 | (1) |
��ʱ��������Ԥ���������ת��ΪӦ�ù���������Ժ���G(��)���бƽ������⡣����Һ��������������ʱ����Խ϶�һ��hȡ1����ʱ��Ϊ����Ԥ������Ԥ�⡣
˫����ǰ����ɢ����������������õķ��������ͽϿ�������ٶȣ���˱��IJ���˫����ǰ�������������G(��)���бƽ�����ṹ��ͼ 1��ʾ��������Ҫ������㡢������������ɣ����������ֱ�Ӳ���������㡣
 |
| ͼ 1 ˫����ǰ����ɢ����������ṹ Fig. 1 Structure of double parallel feedforward discrete process neural network |
| ͼѡ�� |
һ����������������Ϊ������������Ҫ����ɢ������ϳ�ʱ�亯����Ϊ��������������롣Ϊ��ֱ�����ô������IJ���������Ϊ�������������룬��������[14]���þ�������Ϊʱ��ۺ����ӣ�����˫����ǰ����ɢ����������(Double Parallel Feedforward Discrete Process Neural Network��DPFDPNN)ģ�͡��������������������Ϊ
 | (2) |
ʽ�У�xn(L)Ϊijһ״̬���������ɵ�ʱ�����У��䳤��ΪL����K(��)Ϊʱ��ۺ����ӣ���xi(l)(i=1, 2, ��, n��l=1, 2, ��, L)Ϊ����xi(L)�е�l��Ԫ�أ����Ӧ��ȨֵΪ��iL-l+1����iΪ�����ʼֵ����ʱ��ۺ�������Ա�ʾΪ[14]
 | (3) |
����ʱ��ۺ����ӵĹ�����������������ӳ���ϵΪ
 | (4) |
ʽ�У�mΪ������Ԫ��������jiΪ������i�����뵥Ԫ�������j����Ԫ֮�������Ȩֵ��uiΪ������i�����뵥Ԫ������������Ԫ֮�������Ȩֵ��vjΪ�����j����Ԫ��������Ȩֵ����1jΪ�����j����Ԫ�ļ�����ֵ����2Ϊ����㼤����ֵ��
������ʷ�������ݸ�����S������ѧϰ����Ϊ{x1s(L), x2s(L), ��, xns(L); ds}s=1S������xns(L)Ϊ��s�������ĵ�n��ʱ�����У��䳤��ΪL��dsΪ��s�����������������ysΪ��Ӧ����ʵ���������ɢ����������������������ʵ���֮���ƽ��������(SSE)���Զ���Ϊ
 | (5) |
��ET=[e1, e2, ��, es]es=ds-ys
 |
����Levenberg-Marquardt(LM)�㷨[15]��W�ĵ�����������Ϊ
 | (6) |
ʽ��:J(W)Ϊ����W���ſɱȾ���; qΪ��������; IΪ��λ����; ��Ϊѧϰ���ʡ����������ѧϰ�������£�
Step 1ȷ������������ṹ�����ù���������ѧϰ������������������M����ʼ�����������������ji��vj����1j����2�͵�������q��
Step 2�������������뵽���������磬�������ƽ����SSE�;���J(W)��
Step 3����ʽ(6)������������W����������IJ�����������ʽ(5)���¼���SSE�������SSE��ֵ����Step 2�е�SSE�����ظ�Step 3�������SSE��ֵС��Step 2�е�SSE����ת��Step 4��
Step 4���SSEС��������q����M����ת��Step 5������ת��Step 3��
Step 5���ѧϰ�����ͣ����
���ˣ��ɲ���ѵ���õĹ�����������溯��G(��)������ʽ(1)�Է�����״̬����Ԥ�⡣
2 ����Ȩֵ�����㷨 ��Ȼ���߹���������Ԥ��ģ�Ϳ��Է���ض�Һ��������������״̬����Ԥ�⣬������ṹ����ֵ��Ԥ���趨�õģ����ܸ����»�ȡ�������������е��������µ���������������Ч���á���һ���棬Һ���������������������ӹ������ӣ������ֹ��ϻ��߸��ź�����Ԥ��ģ�;��Ƚ��ܵ��ϴ�Ӱ�졣Ϊ��Ч���ø������ݵ���Ϣ����߹����������ݴ���������Ӧ�ԣ�����������[16]���������һ�ֻ��ڼ���ѧϰ�㷨(Extreme Learning Algorithm��ELA)�Ĺ���������Ȩֵ�����㷨�������»�ȡ�����������Թ������������㵽�����Ȩֵ�����Զ����£������Ԥ�⾫�ȡ�
�����߸���N0������Ϊ
 |
����ÿһ�����µ�������������������Ϊ0������
 | (7) |
����N0������������
 | (8) |
ʽ��:
 | (9) |
��Ϊ��������������У�fmN0(��)��ʾ����Ϊ��N0�������ڵ�m����Ԫ�����µ��������ΪȨֵ���������㵽������Ȩֵ��ɣ���
 | (10) |
���У�v��mΪ��m������Ȩֵ����ʽ(7)��N0�����������������ʾΪ
 | (11) |
����ʽ(8)����N0������ȷ������T��HҲΪȷ������ֵ����Ȩֵ������Ϊ�������������ͨ��Moore-Penrose�����������ϵͳ��С������С���˽�õ�[16]����
 | (12) |
ʽ��:

 |
��ʱ�µ�Ȩֵ����Ϊ[17]
 | (13) |
ʽ��:
 | (14) |
��ʽ(13)����������
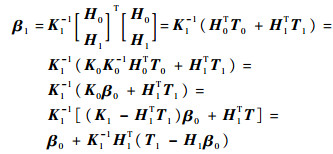 | (15) |
�Դ����ƣ�����k+1�θ���Nk+1������֮�������µ��ƹ�ʽ������
 | (16) |
����Woodbury����[18]��
 | (18) |
 | (19) |
����ʽ(18)��ʽ(19)�Ϳɶ�Ȩֵ���е������¡����ϣ�����Ȩֵ�����㷨�Ĺ������������Ԥ��ʱ������̿ɷ�Ϊ���������Σ�
1) ����ѵ����
����Ԥ���������ʷ�����������߹���������ṹ�������ݵ�2�ڵ����ݶԹ������������ѵ���������Ԥ��ģ�͡�
2) ����ȨֵԤ���
�� ��������ģ�ͽ���Ԥ�⣬��ͬ����¼ʵʱ���µ����������������¸���ΪN0ʱ(ȡN0��m)������ʽ(9)�����ʼ�����������H0���ʼȨֵ������0=P0H0TT0������P0=(H0TH0)-1��
�� ���â��и���Ȩֵ�Ĺ���������ģ�ͽ�������Ԥ�⣬��ͬ����¼�������������������¸���ΪN1ʱ(��ȡN1��N0)������ʽ(18)��ʽ(19)���߸������Ȩֵ����
�� �ظ��ڵĹ��̣�ÿ����������Nk(��ȡNk��N0)�����õ��ƹ�ʽ����µ�Ȩֵ�������Ԥ�⣬ֱ��ͣ��������������ͼ 2��ʾ��
 |
| ͼ 2 Һ����������״̬Ԥ������ Fig. 2 Condition prediction process of liquid propellant rocket engine |
| ͼѡ�� |
3 ��֤���� ���ֱ��DZ�ѹʽҺ��������������Ҫ������Ҳ�ǹ��϶��λ[19-20]�����������ȶ�����ʱ�����ֱõ�����˥�˻���Ͼ����������ֱ���̵ĸı䣬�������ֱ���������ֱ�״̬Ԥ�����Ҫ����Ҳ���ж�Һ��������������״̬����Ҫ���ݡ�������ij�ͺŻ�����������������Ԥ��Ϊ�����ֱ������Ȩֵ���º���Ȩֵ���µĹ���������ģ�Ͷ���̽���Ԥ�⣬���Է����������˱ȽϺ����ۡ�
ȡij�ͺ�Һ����������2�ε����Գ�������������ݣ��Գ���ŷֱ�ΪC0716��C0725��ÿ������200�������㣬�������Ϊ0.1 s���������ݹ��ɵ�ʱ�����зֱ�Ϊ
 |
��̲������ݾ���һ������������ 1��ʾ��������ʱ��������������9��������Ϊ��ʷ���ݣ���{xra, xr+1a, ��, xr+8a}��aȡ716����725��
�� 1 ��һ��������� Table 1 Normalization lift data
| ��� | ��� |
| 1 | 0 |
| 2 | 0.250 0 |
| 3 | 0.166 7 |
| 4 | 0.166 7 |
| 5 | 0.166 7 |
| 6 | 0.250 0 |
| 7 | 0.333 3 |
| 8 | 0.333 3 |
| 9 | 0.250 0 |
| 10 | 0.333 3 |
| 11 | 0.666 7 |
| 12 | 0.750 0 |
| 13 | 0.583 3 |
| 14 | 0.333 3 |
| 15 | 0.250 0 |
| �� | �� |
| 186 | 0.500 0 |
| 187 | 0.583 3 |
| 188 | 0.533 3 |
| 189 | 0.650 0 |
| 190 | 0.500 0 |
| 191 | 0.416 7 |
| 192 | 0.500 0 |
| 193 | 0.650 0 |
| 194 | 0.600 0 |
| 195 | 0.616 7 |
| 196 | 0.500 0 |
| 197 | 0.333 3 |
| 198 | 0.500 0 |
| 199 | 0.583 3 |
| 200 | 0.583 3 |
| �� | �� |
| 386 | 0.166 7 |
| 387 | 0.166 7 |
| 388 | 0.250 0 |
| 389 | 0.250 0 |
| 390 | 0.250 0 |
| 391 | 0.083 3 |
| 392 | 0.166 7 |
| 393 | 0.166 7 |
| 394 | 0.250 0 |
| 395 | 0.166 7 |
| 396 | 0.083 3 |
| 397 | 0.083 3 |
| 398 | 0.166 7 |
| 399 | 0.166 7 |
| 400 | 0.166 7 |
��ѡ��
�����ڵ�10������xr+9a��Ϊ����������Ԥ��ģ�͵���������������裺
 |
����ÿ���Գ����ݶ����Եõ�191��������������ȡǰ91����������182����������ɢ�������������ѵ������������������Ԥ�����顣����������������Ԫ����ȡ10�����������ڵ��Ϊ1���������������˽ṹΪ1-10-1������ѵ������LM�㷨����������������Ϊ0.001���ֱ������Ȩֵ���º���Ȩֵ����2��Ԥ��ģ�ͽ���Ԥ�����顣����Ȩֵʱ��ÿ����10�������������һ��Ȩֵ���£�C0716���Գ�Ԥ������ͼ 3��ͼ 4��ʾ��C0725���Գ�Ԥ������ͼ 5��ͼ 6��ʾ��
 |
| ͼ 3 C0716���Գ����Ԥ���� Fig. 3 Lift predicted value of No. C0716 ground-test |
| ͼѡ�� |
 |
| ͼ 4 C0716���Գ�Ԥ����� Fig. 4 Predicted error of No. C0716 ground-test |
| ͼѡ�� |
 |
| ͼ 5 C0725���Գ����Ԥ���� Fig. 5 Lift predicted value of No. C0725 ground-test |
| ͼѡ�� |
 |
| ͼ 6 C0725���Գ�Ԥ����� Fig. 6 Predicted error of No. C0725 ground-test |
| ͼѡ�� |
��ͼ 3���Կ�������C0716���Գ���ǰ10���������û�н���Ȩֵ���£�����2��Ԥ�ⷽʽ�����ͬ����1 s�Ժ�ʼ����Ȩֵ���£�����Ȩֵ���Ԥ�⾫����������ߡ�ͼ 4ΪC0716���Գ�����Ԥ�����ı仯��û�и���Ȩֵ����ɢ����������Ԥ�����������Ϊ7.82%��ƽ��������3.61%������Ȩֵ���º����������Ϊ1.43%��ƽ��������Ϊ0.68%������ͨ�����߸���Ȩֵ����ʹ˫������ɢ�����������Ԥ�⾫�ȵõ��ϴ���ߡ�ʵ���ϣ���ɢ�������̶���Ԥ���DZȽϾ�ȷ�ģ��������Ų������ݵIJ��ϸ��£�ϵͳ��Ϣ�IJ��ϱ仯��Ԥ��������ۻ�������ģ�͵�Ԥ�⾫��Ҳ�������½���ͨ������ѧϰ�㷨������Ȩֵ���е�����������Ч�����ø���������Ϣ����һ����������Ԥ�⾫�ȡ�
ͼ 5��ͼ 6�ֱ�ΪC0725���Գ���Ԥ������Ԥ�����ʾ��ͼ�����ڷ�������5.6 s�����˹������������ֱ���������½�����ͼ 5��֪��Ȩֵ���º���Ȩֵ���µ�Ԥ��ģ�Ͷ��ܹ���Ϊȷ��Ԥ���������״̬�仯��������Ȩֵ���µ�Ԥ��ģ���ڹ�������Ԥ�⾫���������½������ͼ 6��֪������Ȩֵ���º�Ԥ���ƽ��������Ϊ0.86%�����������Ϊ1.55%����Ȩֵ����ģ��Ԥ���ƽ��������Ϊ5.23%�����������Ϊ8.79%���ɼ�����Ȩֵ���º�Ĺ����������ܹ����ֽϸߵ�Ԥ�⾫�ȣ����ܹ���Ч����߹���������Ŀ�������������ǿ�������������Ӧ�ԡ�Һ������������ʵ�ʹ������ܸ�������Ӱ�죬�乤��״̬���Ӷ�䣬��Ԥ��ʱ��ϳ�ʱ���̶�Ȩֵ�Ĺ�����������ѱ������õ�Ԥ��Ч����Ϊ�ˣ����������㵽������Ȩֵ���и��£���һ����ǿ���������������ʹ�����ڳ���Ԥ��ʱ�Ծ��нϸߵľ��ȡ�
4 ���� Һ�����������ṹ���ӣ��乤��״̬�ܶ�������Ӱ������ʱ��仯�����Խ���ȷ����ѧģ����Ԥ����״̬�仯��Ϊ�ˣ��������һ�ֻ��ڼ���ѧϰ�㷨����ɢ����������ģ�������������״̬Ԥ�����⡣��ģ�;��������ص㣺
1) Ԥ��ģ���ǻ��ھ�����ʱ��ۺ�������˫����ǰ������ṹ�����Ĺ��������磬����ֱ�Ӵ�����ɢ�ɼ����ݲ����нϿ�������ٶȺͷ���������
2) ���ü���ѧϰ�㷨���ڸ������������Ļ����϶��������㵽������Ȩֵ���и��£���һ�������ģ�͵�Ԥ�⾫�Ⱥ���Ӧ������
ʵ���о��������÷�������Ȩֵ���µĹ���������ģ�;��и��ߵ�Ԥ�⾫�Ⱥ���Ӧ������������Ч�ؽ��Һ����������״̬Ԥ�����⡣���ǣ����ڲ�ͬ���ʵļ�����ʱ�����У��������ڸ���������ѡ������Լ�Ȩֵ���»��Ƶ������ϻ����һ��ͨ��ʵ����з����о���
�����
| [1] | ����, ����ͬ, ��ϲԪ. ����Ԥ���뽡��������������[J].���Ӳ���������ѧ��, 2010, 24(1): 1�C9.PENG Y, LIU D T, PENG X Y. A review:Prognostics and health management[J].Journal of Electronic Measurement and Instrument, 2010, 24(1): 1�C9.DOI:10.3724/SP.J.1187.2010.00001(in Chinese) |
| [2] | ��·, ���, ����ΰ. Elman����������Һ��������������Ԥ���е�Ӧ��[J].�������Ƶ�ѧ��, 2009, 29(1): 191�C194.TIAN L, ZHANG W, YANG Z W. Application of Elman neural network on liquid rocket engine fault prediction[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2009, 29(1): 191�C194.(in Chinese) |
| [3] | ������, ������. �Ľ�BP�������ڳ�ѹ����������Ԥ���е�Ӧ��[J].�����뺽�����ؼ���, 2007(3): 45�C49.CHEN S L, CHEN X M. Improved BP neural network and its application in performance predicting of ramjet[J].Missile and Space Vehcile, 2007(3): 45�C49.(in Chinese) |
| [4] | ����, ��־��. ����Matlab��BP������Ĺ������������ȳ����ܵ�Ԥ��[J].���ɹſƼ��뾭��, 2007(8): 73�C74.WANG Y, DUAN Z X. Solid propellant rocket engine specific impulse performance predicting based on Matlab and BP neural network[J].Inner Mongolia Science Technology & Economy, 2007(8): 73�C74.(in Chinese) |
| [5] | ���, ���, ����ΰ, ��. SVM�����ڻ������������Ԥ���е�Ӧ���о�[J].��е��ѧ�뼼��, 2010, 29(1): 63�C67.TIAN G, ZHANG W, YANG Z W, et al. Study on SVM methods of liquid rocket engine fault prediction[J].Mechanical Science and Technology for Aerospace Engineering, 2010, 29(1): 63�C67.(in Chinese) |
| [6] | ��ʫʤ, ����. ����С������������ķɻ�������״̬����[J].����ѧ��, 2007, 28(1): 68�C71.ZHONG S S, LI Y. Condition monitoring of aeroengine based on wavelet process neural networks[J].Acta Aeronautica et Astronautica Sinica, 2007, 28(1): 68�C71.(in Chinese) |
| [7] | ���ǻ�, ����, ��־��, ��. �������ɷַ�������ɢ����������ˮ�Ͳ㶯̬Ԥ�ⷽ��[J].�⾮����, 2010, 34(5): 432�C437.ZHONG Y H, LI R, ZHANG Z Y, et al. Dynamic recognition method for water-flooded layer with discrete process neural network based on the principal component analysis[J].Well Logging Technology, 2010, 34(5): 432�C437.(in Chinese) |
| [8] | ������, ����, ��ʫʤ, ��. ���շ�����������Ԥ��Ĺ��������編[J].�����������, 2011, 31(3): 331�C336.JIN X Y, LIN L, ZHONG S S, et al. Aeroengine vibration tendency prediction based on process neural network[J].Journal of Vibration, Measurement & Diagnosis, 2011, 31(3): 331�C336.(in Chinese) |
| [9] | ������. ����˫���㾶�����������������ֻ�����������Ԥ��[J].��������, 2014, 43(7): 32�C36.GONG H C. Double hidden layer RBF process neural network based online prediction of steam turbine exhaust enthalpy[J].Thermal Power Generation, 2014, 43(7): 32�C36.(in Chinese) |
| [10] | ���Ʒ�, ��ݶ, ������, ��. ���ڼ���ѧϰ�Ĺ����������о�������Ӧ��[J].�Ϻ���ͨ��ѧѧ��, 2014, 48(7): 977�C981.LIU F F, PENG D, HE Y L, et al. Research and chemical application of extreme learning based process neural network[J].Joural of Shanghai Jiao Tong University, 2014, 48(7): 977�C981.(in Chinese) |
| [11] | κ����, �⽨��, �����. Һ����������һ��ͨ��ģ�黯���淽��[J].�ƽ�����, 2005, 26(2): 147�C150.WEI P F, WU J J, LIU H G. Investigation of a general model simulation method for liquid propellant rocket engine[J].Journal of Propulsion Technology, 2005, 26(2): 147�C150.(in Chinese) |
| [12] | ������, �ڴ���, ������. Һ����������й©����ʵʱ����[J].�ƽ�����, 1999, 20(5): 1�C5.WANG J B, YU D R, WANG X. Real-time simulation of leak fault of liquid rocket engine[J].Journal of Propulsion Technology, 1999, 20(5): 1�C5.(in Chinese) |
| [13] | �⽨��, ������, ������. Һ����������ʵʱ���Ϸ���ϵͳʵ��[J].�ƽ�����, 1997, 18(1): 26�C30.WU J J, ZHANG Y L, CHNE Q Z. The real-time fault simulation system for liquid propellant rocket engines[J].Journal of Propulsion Technology, 1997, 18(1): 26�C30.(in Chinese) |
| [14] | ��ʫʤ, ����, ������. ����������ģ�ͼ��乤��Ӧ��[M].����: ������ҵ������, 2014: 119-121.ZHONG S S, DING G, FU X Y. Process neural network models and its engineering applications[M].Beijing: National Defense Industry Press, 2014: 119-121.(in Chinese) |
| [15] | HAGAN M T, MENHAJ M B. Training feedforward networks with the Marquardt algorithm[J].IEEE Transactions on Neutral Networks, 1994, 5(6): 989�C993.DOI:10.1109/72.329697 |
| [16] | HUANG G B, DING X J. Optimization method based on extreme learning machine for classification[J].Neurocomputing, 2010, 74(1): 155�C163. |
| [17] | LIANG N Y, HUANG G B, SARATCHANDRAN P, et al. A fast and accurate online sequential learning algorithm for feedforward networks[J].IEEE Transactions on Neural Networks, 2006, 17(6): 1411�C1423.DOI:10.1109/TNN.2006.880583 |
| [18] | ZHANG R, LAN Y, HUANG G B. Universal approximation of extreme learning machine with adaptive growth of hidden nodes[J].IEEE Transactions on Neural Networks, 2012, 23(2): 365�C371.DOI:10.1109/TNNLS.2011.2178124 |
| [19] | л���.Һ�������������ֱ�ʵʱ���ϼ�⼼����ϵͳ�о�[D].��ɳ:������ѧ������ѧ, 2006:1-3.XIE G J.Research on real-time fault detection technology and system for liquid rocket engine turbopump[D].Changsha:National University of Defense Technology, 2006:1-3(in Chinese). |
| [20] | ��³��.Һ�������������ֱý�����عؼ�������ϵͳ�о�[D].��ɳ:������ѧ������ѧ, 2010:1-3.XIA L R.Research on key technology and system for turbopump health monitoring of liquid rocket engine[D].Changsha:National University of Defense Technology, 2010:1-3(in Chinese). |
