ͨ����������ֱ���й켣�滮����ͨ�������滮�ռ� �� ,�����Ӷ�Լ��������ϵ��������ۺ�����,���������õ�����Լ�����Ƶ�ͨ����ֱ����滮������Ŀǰ��Ժ����滮����ķ����ܶ�,�����ķ�������:A*�㷨��Dijkstra�㷨��Voronoiͼ�����˹��Ƴ������Ŵ��㷨����Ⱥ�㷨�Լ��������[1-5]�������滮�����ķ�������ֶ���,ͨ�������չ滮������������Ϊ��ͳ�滮�㷨�����ܹ滮�㷨,Ҳ�����չ滮�ռ��������Ϊդ��滮�ռ��㷨��ͼ�ι滮�ռ��㷨��Ŀǰ,���Ӷ�Լ�������µĺ����滮���������ڶ������ѧ������о���,ͨ������Ŀ���Ȩ�����Թ�������ָ��,ѡȡ���ʵ������㷨,������������ѧ�����ŵ㡱�����滮�����ź���[6]��Ȼ��Ŀǰ�ĺ����滮��������˻��������Լ����÷�����չ��[7],����ͨ������������ҵ���������ܴ��ڽϴ����,ʹ�����������滮�������ܼ����Ƶ�ͨ������ͨ����ʹ�����ú���������һ�����亽����������ú��ջ,��Ȼ����ͨ���ķ�������һ�����亽���п�����ͬ,��ͨ����ʹ�ø������С�ͷ�����,��˱�����Ҫ��Ի���������ͨ��С�ͷ�����չ�������滮�о�,ͬʱ���ǵ�һ�����亽�շ��и߶ȸ�,���к���Ҫ������ڹ̶���·��,��ͨ�����ڿ��ſ���������ѡȡ���к���,���һ�����亽�մ�ֱ���й켣�滮������ͨ��Ҳ��ͬ,Ŀǰ��û��ר�����ͨ�����������Ӷ�Լ�������µĴ�ֱ���й켣�滮������
�����ۺϿ��Ƿ�����������Ϣ�ͷ��������ܲ�����Լ������,�Ի���դ���A*�㷨���мĽ�,�㷨����ʵ��,�����ٶȿ�,�˷���A*�㷨��ͨ����ֱ���й켣�滮������Ӧ�õľ�����,ʵ����������Ľ�A*�㷨���ɵ�ͨ����ֱ����滮�������ڴ�ͳ·���滮������
1 �������� ͨ����������ֱ���溽���滮������Ա�����Ϊ��ͨ�����������ڴ�ֱ����Ϊ �� ,������� S ���յ� T λ����Ϣȷ�� �� ��С,��ִ֪�������Ԥ�躽�����Լ�������������,���ռ���õ�һ���ں�������ģ�Ͷ����µĴ�ֱ�������Ż���й켣��ͨ����������ֱ����滮������Ҫ����2����������:�ٲ��������������������ޣ��������������Ҫ��(������и߶�Ҫ����Ԥ�躽����Ҫ���)���������ͨ����ֱ����Լ����������,����˵������:
1) �������/�½��ǣ�����ͨ������������������ָ��,���Լ��ͨ�������������ڴ�ֱ�������������½��ĽǶȷ�Χ��
2) ��С�����γ��ȣ�������,ͨ�����������ַ�����̬�������̾���,���ɷ������Ļ������ܾ�����
3) ���и߶����ƣ�����������Ƹ߶ȡ���Ͱ�ȫ�߶����,�й�Ŀǰ��ͨ������Ϳտ���ֱ��Χԭ��Ϊ���1 000 m����[8],ͬʱ������Ƹ߶ȿɸ��ݲ�ͬ��������(�����ѧʵ�顢������Ӱ��)��������,�����и߶Ȳ��ó���������Ƹ߶��Ҳ��õ�����Ͱ�ȫ�߶ȡ�
4) Ԥ�躽���㣺��ִ�з��мƻ�������,Ϊͨ��������Ԥ���趨��Ҫ����뾭���ĺ���λ�õ㡣
5) ��ֱ����������������ִ�з������������,�ڴ�ֱ�����ϸı������̬�Ĵ���,��ֱ��������Խ��,��ʻԱ�IJ�������Խ��,Խ����ƣ��,�ͺ�Ҳ����֮���ӡ�
ͨ�����й����п��ܴ�����ʱ�ԵĻ�������,���ǵ������ڷ����б�������ķ���,�������滮��Ŀ������Ԥ�ȸ���һ���ں�������ģ�Ͷ����µĹ滮����,��ʱ�Ի������еĴ��ڲ���Ӱ�캽���滮����Ч��,���������Լ��������ϵ�A*�㷨��ȥ,����ͨ��Լ����ģ��ͨ����������ֱ���溽���滮���⡣
2 ��ֱ���溽���滮 2.1 A*�㷨 A*�㷨�ǵ�ǰ�㷺Ӧ�õľ�������ʽ·��Ѱ���㷨֮һ�����㷨�Ļ���˼·��ͨ��Լ����ģ��Լ��������������������,��ͨ��Ŀ������С����·��Ϊ���Ž��,���ۺ�����2���������,�䶨��Ϊ[9]
 | (1) |
ʽ��: g(n) Ϊ�ɵ�ǰ�ڵ� n ����� S �����·�����ۺ����� h(n) Ϊ��������,Ҳ�����ɵ�ǰ�ڵ� n ���յ� T �Ĺ��ƴ��ۺ����� f(n) Ϊ����� S ����������ǰ�ڵ� n �������յ� T �ĺ������ۺ�����A*�㷨���ǽ���ѡ�ڵ��ж�Ӧ f(n) ֵ��С�Ľڵ���Ϊ��������չ�ڵ㡣
A*�㷨�����ڹ����ľ�̬դ�����������Ż����·��,һ�����㷨ִ�й������蹹��2����̬��:OPEN����CLOSE��,OPEN���洢������ɵ�δ������չ�Ľڵ�,CLOSE���洢�ѷ�����չ�Ľڵ㡣��ÿ������������,���ȴ�OPEN���л�ȡ������ֵ��С���Ľڵ�,�������CLOSE������ɱ�����չ������չ��ĸ��ڵ���з���,���շ����������OPEN����CLOSE������,�������ʵ���չ�ڵ����CLOSE��,��������Ŀ��ڵ�,����ֹ��չ,�����ظ����Ϲ���,������OPEN��Ϊ�ղ���δ���ҵ�Ŀ��ڵ�,����õ�ǰ���ۺ������㷨���������ź�����
��ͨ����ֱ������й켣�滮�������,A*�㷨�ܽ�ͼ����������ת��Ϊ������������,��������Ϣ�������㷨����������,�ȿ��������Ч��,�ֿɱ�֤�õ���ֱ����滮����������[10]��ͨ�����ۺ������������Ժ�����������Ӱ��A*�㷨���ܵ�3����Ҫ����,A*�㷨�Ĺ滮ʱ�䡢��ȷ������դ�����Ŀ����С��ء�
2.2 �滮�ռ乹�� �����øĽ�A*�㷨��ͨ����ֱ���溽�����й滮֮ǰ,������Ҫ����һ����������,�� (x,y) Ϊ���ڵ������, x Ϊ���о���, y Ϊ���θ߶�,����֪��� S ���յ� T ��λ����Ϣ֮��,�Ϳ���ȷ������С,�� Xmax Ϊ����Ӧ���о�������ֵ,�� Ymax Ϊ����Ӧ���θ߶ȵ����ֵ,���������Ա�ʾΪ���� {(x,y)|0��x��Xmax,0��y��Ymax} ��
ͨ�����Ի��ֵĵ���դ��Ϊ������Ԫ,������դ��Ԫ��Ӧ�Ĵ���ֵ���ɴ��۾���,��������������Ϣ�ͷ��������ܲ�����Լ��������ʾ�ɷ�����Ϣ,���ò�ͬ���ݽṹ��ʾ��ͬ�Ļ�����Ϣ,�����䵼�빹���Ĵ��۾���,���ڼ��������,ʹ�ôӵ�ǰ�ڵ㵽Ŀ��ڵ㺽������С�ۻ�������Ϊÿ��դ��Ԫ����Ѵ���[11],������ɶ�ͨ�����Ĺ�����
2.3 Լ��������ģ Ϊ��֤�ڸ��Ӷ�Լ�������¹滮������ĺ���,�ۺϿ���ͨ����������ֱ���溽���滮�ĸ���Լ������,��Լ����ģ����ʵ�ֹ��̽�����ϸ˵����
����������/�½��ǵ���������,��Լ����ͨ������������������ָ��֮һ,��������ͨ���������������������½������Ƕȡ���� i �δ�ֱ���溽����ˮƽͶӰ����Ϊ xi��xi��1 ,���Ӧ��ֱͶӰ����Ϊ yi��yi��1 ,�����������/�½���Ϊ �� ,���������/�½���Լ����ģ�ɱ�ʾΪ[12]
 | (2) |
������դ���и������ڵ㺽��,A*�㷨�ǶԵ�ǰ�ڵ���������ڽڵ���㺽������,�� i ��������ܵ��˶�����Ϊͼ 1������1~8,�������������˶�������������/�½��� �� ������,�����������ڵ����ⷽ�����,����������� i ������������ҷ�,�� i �����չ�����ڵ�Ϊͼ������2��3��4��3������,������������������������/�½��ǵ���������,���Ҷ������ռ�����˻���,����������㷨��ִ��Ч�ʡ�
 |
| ͼ 1 �ڵ���չ���� Fig. 1 Expanding directions of a node |
| ͼѡ�� |
�����С�����γ��ȵ���������,����к����� {li|i=1,2,��,m} ���,��ͨ��������������դ��,�����������/�½��� �� ��Լ������,��դ�������Ϊ������,�Գ����γ�Ϊ��С�����γ��� lmin ,�������С�����γ��ȵ�Լ��������ģ�ɱ�ʾΪ[13]
 | (3) |
��Է��и߶�Լ����������,����������Ƹ߶� htop ����Ͱ�ȫ�߶� hlow �������й��Ϳտ�������ͨ������������Ƹ߶� htop ��������Ϊ1 000 m,ͬʱ��Ҳ�ɸ��ݲ�ͬ������������(�����ѧʵ�顢������Ӱ��)�������������ݷ���ģʽ����ҵ����ͷ��нε���Ͱ�ȫ�߶�Ҫ��,����ͨ����ֱ���溽����Ͱ�ȫ�߶� hlow ,���ͷ������������ײ�ķ��ա�
���ͨ�����������мƻ�ִ����Ԥ�躽�������������,������ k ��Ԥ�躽����,�����䵽�յ� T �ľ���Զ�����б��,������Ϊ 1,2,��,k ,����� S ���յ� T �ֱ���Ϊ 0 �� k+1 ,�ٰ��ձ�����ηֶι滮����,�����ӷֶι滮�ĺ���,�õ�����Լ�����ƵĴ�ֱ����滮������
��Դ�ֱ������������������������ֱ������������ M(i) ������������,��������ij�����ڵ㷢��һ�δ�ֱ����,��ֱ������������,���ֲ���,ͨ���� M(i) Ȩ��ϵ���Ŀ���ʵ�ֶ�ͨ����������ֱ�������������ơ�
Ϊ�˻�����㸴�Ӷ�Լ�������Ĵ�ֱ����滮����,ͨ��Լ����ģ��������ͬ��Լ��������A*�㷨����,���յõ�һ��������ͨ����������ֱ���溽���滮�ķ���,�����ܶ������ռ������Ч��,�Ӷ�ʹ����Ч�ʵõ���ߡ�
2.4 �������۽�ģ Ϊ��֤ͨ���������İ�ȫ,�����ӪЧ��,ͨ��������������Ҫ���������������������������,������ҪӦ�Է��������Լ��,��˴��ۺ����б���������������ĸ�Ӱ������,���ý������ۺ����IJ���,�ɹ���������չ�ڵ����������,��ɸѡ��������ֵ��С,���������������ۺ���������ϵ�µ����ź���������,��������� S ��������ǰ�ڵ� n �����·���Ĵ��ۺ���:
 | (4) |
ʽ��: H(i) Ϊ�� i �������ڵ�����Ͻ����Ƹ߶� hmax(i) ��ú����ڵ���� hreal(i) �IJ�ֵ����,�� H(i)=hmax(i)-hreal(i) ,���� H(i) ԽС,��ʾͨ��������Խ�ӽ���������������Ƹ߶ȣ� M(i) Ϊ�ӵ� i��1 ���� i �������ڵ㴹ֱ��������,���Ӧʽ(4)�еĵ�2�����ֵԽС,��ʾͨ����������������Խ��,��ʻԱ�IJ�������ԽС�� D1(n) Ϊ�ɵ�ǰ�ڵ� n ����� S �Ĺ滮·�����ȴ���,�� D1(n) ֵԽС,���ʾͨ������������Խ�̣� ��1����2 �� ��1 Ϊʽ(4)�и�Ӱ�����ض�Ӧ��Ȩ��ϵ����
���ĵ���������ѡ�ôӵ�ǰ�ڵ� n ���յ� T �������پ��� D2(n) ��ʾ,�˴�Ҳ���������ڴӵ�ǰ�ڵ� n ���յ� T �ľ�������ܺ�[14]�������е�ǰ�ڵ� n ������Ϊ (xn,yn) ,�յ� T ������Ϊ (xT,yT) ,������������پ�����Ա�ʾΪ
 | (5) |
������ɵ�ǰ�ڵ� n ����� S �Ĺ滮·������ D1(n) ��ŷʽ�������,�����������ȿɱ��ϰ����㹻��������Ϣ��,�ֿ���Ч�����㷨����Ч��,�����������������ɵĹ��ƴ��ۺ���Ϊ
 | (6) |
ʽ��: ��2 Ϊ��������D2(n)��ӦȨ��ϵ����
����,��ֱ���溽�����ۺ�����дΪ
 | (7) |
�Ľ�A*�㷨�Ļ���ԭ����������չ f(n) ֵС�Ľڵ�,��ǰ�ڵ� n �� f(n) ֵ��ͬʱ��ѡ�Ķ���ڵ�� f(n) ֵ��Ϊ��Сʱ, n ������Щ��ѡ�ڵ��е����ŵ�,������ʽ�㷨��������ʵ���Ͼ���һ���ڵ㲻�ϵ����ɺ���չ�Ĺ���[15]�����øĽ�A*�㷨����ͨ����������ֱ����滮�켣ʱ,�������ڴ�ֱ���湹��դ��滮�ռ�,����������դ��Ϊ������ֱ����Ҫ��դ��,�Է��о��� l �ͷ��и߶� h Ϊ�ᡢ�����������,Ϊͨ�������� V �滮�����㸴�Ӷ�Լ�������Ĵ�ֱ������й켣��
2.5 ȷ��Ȩ��ϵ�� Ϊʹͨ����������˳�����,��Ȩ��ϵ�� ��1����2����1 �� ��2 Ӧ����ͨ�������������ܡ���������Ҫ���Լ����л���������������Ӧ�仯��
��Ȩ��ϵ���������һ�ֶ�Ŀ���������,���нṹ���ӡ��������ࡢ���Է����붨��������ӵ�����,���ǵ���η����������Զ��ԺͶ������ϵķ�ʽ�������ָ��Ӿ������ص��ŵ�,�����ڽ�����Ʊ����и�Ȩ��ϵ��ȷ���Ķ�Ŀ���������,��˱��IJ��ò�η�����[16]��ȷ����Ȩ��ϵ��,ʽ(7)��Ȩ��ϵ�� ��1����2����1 �� ��2 �ֱ��ӦӰ������1~4,����һ���ṹ�Ķ�����߲���,��ͨ�������滮ר�ҵ�˼ά���̲�λ���������,����ʵ�ֲ�������:
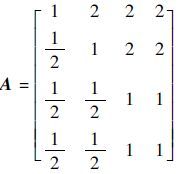
1) �����жϾ���A,��Ӱ������1~4���������Ƚ�,ȷ������и������ص������Ҫ�̶�֮�� aij ,֮���Զ����ķ�ʽ��ʾ����,�������Ҫ��һ�����1~9�����ּ��䵹���ı������ʾ[17],���� aij ֵ��������,���� i ��������� j ����Ҫ��Ҳ�������ӡ�����, aij=1 ��ʾ���� i ������ j ��Ҫ����ͬ, aij=5 ��ʾ���� i ������ j ���������Ҫ������,���ĵ�4���жϾ���Ϊ
 | (8) |
2) �����Ȩ��ϵ��,��������ֵ����⺽�����ۺ����еĸ�Ȩ��ϵ��,����Ϊ
 | (9) |
ʽ��: ��max Ϊ�жϾ��� A ���������ֵ�� W Ϊ A ��Ӧ����������,�� W �����һ�������Ϳɵõ��������ۺ�����Ȩ��ϵ����
3) ����һ����,�жϾ��� A ��һ����ָ��ͨ�����Ա�ʾΪ
 | (10) |
ʽ��: s Ϊ�жϾ���Ľ����� r��c �ֱ�Ϊ��η������е�ƽ�����һ����ָ���һ���Ա���,���� r ���жϾ�������й�,����ѯƽ�����һ����ָ���[17],�õ����жϾ������ s=4 ʱ,��Ӧ r=0.89 ,���� c ֵ, c ֵԽС�жϾ��� A ��һ����Խ��,�� c ��0.1 ʱ,�жϾ��� A ��һ���Կ��Խ���,��������жϾ��� A �еĸ�����е�����
2.6 �㷨�������� ���ڸĽ�A*�㷨��ͨ����������ֱ���溽���滮�������岽������,���Ӧ����ͼ��ͼ 2��
 |
| ͼ 2 �㷨����ͼ Fig. 2 Algorithm flowchart |
| ͼѡ�� |
���� 1 ��ʼ���滮�ռ�,�Թ滮�ռ�������դ��,����� S ���յ� T ��λ����Ϣ����滮�ռ�,����滮Լ����Ϣ��
���� 2 ����OPEN����CLOSE��,������� S ����OPEN��,ͬʱ��CLOSE���ÿ�,��ʱOPEN����ֻ����� S ��
���� 3 ����OPEN��,����С f(n) ֵ�Ľڵ���Ϊ��ǰ�ڵ� n ,ͬʱɾ��OPEN���еĵ�ǰ�ڵ� n ,�����䵼��CLOSE��,��ɶ�OPEN��CLOSE���ĸ��¡�
���� 4 ��չ��ǰ�ڵ� n �����ڽڵ�,��˳��ִ����������:�� �������չ�ڵ㲻����Լ������������ͨ�л��߸ýڵ��Ѿ���CLOSE����,��������Ϊ���ɴ��,���Բ��ɴ��,���䲻���κβ���,���������һ���ڵ㡣�����OPEN����������չ�ڵ�,����OPEN���м������չ�ڵ�,ͬʱ���õ�ǰ�ڵ� n Ϊ�丸�ڵ�,��������չ�ڵ� n�� ��Ӧ�� g(n��) �� f(n��) ֵ�������OPEN��������չ�ڵ�,������Ե�ǰ�ڵ� n Ϊ���ڵ����չ�ڵ� n�� ��Ӧ�� g(n��) �Ƿ�С��ԭ�� g(n) ֵ,��С��,�������չ�ڵ� n�� �ĸ��ڵ�Ϊ��ǰ�ڵ� n ,��������չ�ڵ� n�� ��Ӧ��g(n��)�� f(n��) ֵ,����С��,���¡�
���� 5 �ظ�����3�Ͳ���4ֱ������ѭ����������,Ҳ���ǵ��յ� T ������OPEN����Ϊ����ڵ�ʱ,��ʾ�õ�����������ֱ����滮����,��ʱ�ɽ���ѭ����������OPEN������Ϊ��,���Ѿ�û���µĽڵ��������,ͬʱCLOSE����û���յ� T ,��ʱҲ����ѭ��,������δ�ҵ��滮������
���� 6 ���յ� T �ش洢�ĸ��ڵ㿪ʼ����,���վ��������õĽڵ������Ҫ��Ĵ�ֱ����滮������
3 ʵ��������� ���IJ��øĽ�A*�㷨,��ͨ����ֱ���溽��չ���滮ʵ��,ʵ��ʹ�ü������ƵΪ2.5 GHz,�ڴ�Ϊ4 G,ʵ�黷��ΪMATLAB,��Ի�������С�ͷ�����չ���о�,�Ծ���Cessna 172����Ϊ��,ʵ���漰�ɻ����ܲ�����ȡ��Cessna 172����Ա�����ֲ�[18]������С�ɿռ���� S �Ϳռ��յ� T ȷ��,������� S γ�ȡ����Ⱥ߶�Ϊ(34.37��,109.39��,0 m),�յ� T Ϊ(34.28��,110.09��,0 m),3���辭����Ԥ�躽��������ΪP1(34.14��,109.53��,750 m)��P2��(34.36��,��109.58��,750 m)��P3(34.26��,110.03��,750 m),����Cessna 172��������ģ��,��������Ϊ������դ��,դ�ȸ�����С�����γ��� lmin ��������Ϊ500 m,դ��߶ȸ����������/�½��� �� ��������Ϊ50 m��
ʽ(11)Ϊ���ʵ�ʷ������ݡ���������Ҫ��ͷ�������������Ӱ������ȷ�����жϾ��� A ,�жϾ��� A �и�Ԫ��ȡֵ��С���պ����������������и���Ӱ�����ص������Ҫ�̶ȡ�
 | (11) |
��2.5�ڷ������㺽����������������Ȩ��ϵ����СΪ: ��1=0.395 2,��2=0.278 1,��1=0.163 4,��2=0.163 4, �������ֵΪ: ��max=4.060 6 ,һ���Լ��� c=0.022 7 ,���� c ��0.1 ������
Ϊ����֤�Ľ�A*�㷨����Խ��,����ͬ�Ĺ滮�ռ���������,���������봫ͳA*�㷨���бȽ�,��������Ӧ�ù㷺����A*�㷨�������ƿ�ܵĴ�ͳDijkstra�㷨���Ľ�Dijkstra�㷨(���б߽��������)�Ƚ�,�ֱ�滮������ͬ����� S ����ͬ���յ� T �Ĵ�ֱ���溽��,��������3���㷨���滮�������ķ��и߶ȡ�����������ȼ�����ĺ���չ�ڵ���������ָ�ꡣ
ͼ 3Ϊ��ͳA*�㷨����ͳDijkstra�㷨���Ľ�Dijkstra�㷨(���б߽��������)�Ľ�A*�㷨�Ĵ�ֱ����滮������ͼ����ɫ����Ϊ������ֱ�����������,��ɫ����Ϊͨ��������Ͱ�ȫ�߶�������,�����Ŀ�ӷ���������Ѳ���ٶ�С��250 km/h����Ͱ�ȫ�߶�����Ϊ��������100 m��������,��ɫ����Ϊ������ҵ�����ϱ߽�,����յͿտ���������ͬ����������趨,�˴�����Ϊ���1 000 m,��ɫ����Ϊ�㷨�滮��ͨ����������ֱ���溽����
 |
| ͼ 3 ���ô�ͳA*�㷨����ͳDijkstra�㷨���Ľ�Dijkstra�㷨�Ľ�A*�㷨�Ĵ�ֱ����滮���� Fig. 3 Vertical profile of planned trajectory obtained by traditional A-star algorithm,traditional Dijkstra algorithm,improved Dijkstra algorithm and improved A-star algorithm |
| ͼѡ�� |
ͼ 3(a)��ͼ 3(b)�ֱ���·���滮�г��õĴ�ͳA*�㷨�ʹ�ͳDijkstra�㷨���,���߹滮������,��Ȼ���ʵ��������Ӧ�������ۺ����µĹ滮·�����,�����ڵ��������Ϊ���ҵĵ����滮���ĺ����������߶��п��ܳ��ֹ��͵�״��,Ӱ����а�ȫ����ͼ 3(c)��ʾ,�Ľ�Dijkstra�㷨��Ȼ�ԵͿշ����ϱ߽���кܺõĸ���Ч��,�����˳��ַ��и߶ȹ��͵����,Ȼ��������������,�����˷���Ա�IJ�����������ͼ 3(d)��ʾ,�Ľ�A*�㷨�����ɱ������ͼ 3(a)��ͼ 3(b)�з��и߶ȹ��͵����,����������ͼ 3(c)����ʾ�Ľ�Dijkstra�㷨���Ҳ������,��Ч�������Ա����������
ͼ 4Ϊ��ͳA*�㷨����ͳDijkstra�㷨���Ľ�Dijkstra�㷨(���б߽����Ч��)�Լ��Ľ�A*�㷨4���㷨�滮����������ϱ߽����Ա�Ч��ͼ,��ͼ�п��Կ�����ͳA*�㷨����ͳDijkstra�㷨�滮����������ϱ߽������,�Ľ�A*�㷨������ϱ߽�ľ�����ڴ�ͳDijkstra�㷨�Ľ�Dijkstra�㷨֮��,Ҳ����˵Ѳ������С��ظ߶Ƚϴ�ͳDijkstra�㷨��A*�㷨���������,����ڵͿտ��Ÿ߶Ȳ����������ӷ��а�ȫϵ����
 |
| ͼ 4 �滮����������ϱ߽���� Fig. 4 Interval between planned trajectory and upper boundary of permitted flight region |
| ͼѡ�� |
�� 1Ϊ4���㷨�滮�������漰��Ҫ���ָ��ıȽ�,���в�������4���㷨�ɷֱ�滮���������ڵ���о���ͷ��и߶�ȷ���ļƻ�����,�ɺ������ۺ����еľ��������ɼ���õ����� 1���ܵķ��о���,�ɷ����ϱ߽�ȷ���Ĵ�ֱ������ҵ��ΧΪ1 km,�������ˮƽ������ҵ��Χ100 km�dz�С,ʹ������4�������·��Ϊ��Ҫ��Ĺ滮�㷨��Ȼ�ڴ�ֱ����ĺ�������ϴ�,�����о����ԱȽϽӽ���
�� 1 ���㷨�滮�������漰��Ҫ���ָ��ıȽ� Table 1 Important indexes compare of the results obtained by 4 trajectory planning algorithms
| �㷨 | ƽ�����и߶�/m | ���и߶ȷ���/m | ��С��ظ߶�/m | ��������/�� | ���о���/km | ȼ������/L | ��չ�ڵ���Ŀ/�� |
| ��ͳA* | 551 | 24 | 50 | 24 | 101.12 | 15.72 | 693 |
| ��ͳDijkstra | 533 | 22 | 50 | 24 | 101.11 | 15.71 | 6 409 |
| �Ľ�Dijkstra | 851 | 13 | 700 | 69 | 101.32 | 17.85 | 6 365 |
| �Ľ�A* | 803 | 13 | 650 | 30 | 101.28 | 17.42 | 2 584 |
��ѡ��
�� 1�е�ȼ�������ǰ���Cessna 172�����ֲ�[18]����õ�,�����ݼƻ������ڸ����߶Ȳ�������Ѳ���ȵ�ʵ�ʷ��о����Լ���Ӧ�߶Ȳ���е�λ�����ȼ�����Ŀ��Լ����������ȼ�����ġ�����Cessna 172�����ֲ�[18]�������½��ε�ȼ������,����ȼ��������Ҫ��������Ѳ���ξ���,���������а������¡����ϻ���2��,ʹ���� 1�г��ִ�ͳA*�㷨����ͳDijkstra�㷨��Ľ�A*�㷨�Ļ�����������,��ȼ���������϶�,���Ľ�Dijkstra�㷨��Ľ�A*�㷨�Ļ����������϶�,��ȼ����������������
�� 1�еĸĽ�A*�㷨��Ȼ���������ռ�,�����ڽ���������ģ�͵�����������,ʹ����չ�ڵ�������ڴ�ͳA*�㷨,�����봫ͳA*�㷨����ͳDijkstra�㷨���ƽ�����и߶ȸ���,���и߶ȷ������Լ�С,��С��ظ߶���������,�����ڵͿտ��Ÿ߶Ȳ����������ӷ��а�ȫϵ��,����Ľ�Dijkstra�㷨�����չ�ڵ�������Լ���,�㷨ִ��Ч�ʸ���,�����������Խ���,����Ա������������,�ھ߱��������Ƶ�����±�֤�ɻ�ȼ������������3�ַ������,�������Ʒ�����Ӫ�ɱ���
4 �� �� �������ۺϷ������Ӷ�Լ��������ͨ����������ֱ���溽���滮����Ļ����������һ���µĽ������,��ʵ����֤����:
1) �㷨�ۺϿ��Ƿ�����������Ϣ�ͷ��������ܲ�����Լ������,��������Ĺ滮�ռ�,ͨ��Լ����ģ�����Ӷ�Լ��������ϵ��滮�㷨��ȥ,�˷��˴�ͳ·���滮������ͨ����ֱ������й켣�滮������Ӧ�õľ����ԡ�
2) �㷨����Ŀ���Ȩ������������������ģ��,�������پ�����Ϊ��������,��Լ��ģ�����뺽�����ۺ����Ӷ���������ָ��,�����˷���ͨ����ֱ���溽���滮���Եĺ������۷�����
3) �㷨�봫ͳA*�㷨����ͳDijkstra�㷨���,���и߶ȸ���,���и߶ȷ������Լ�С,��С��ظ߶���������,ʹ���ڵͿտ��Ÿ߶Ȳ��ڷ��а�ȫϵ����������,����Ľ�Dijkstra�㷨�����չ�ڵ�������Լ���,�㷨ִ��Ч�ʸ���,�����������Խ���,����Ա�����������ᡣ�ھ߱��������Ƶ�����¸Ľ�A*�㷨��֤�ɻ�ȼ������������3�ַ������,�������Ʒ�����Ӫ�ɱ�,�ܹ���Ϊ��Ч�ؽ�����Ӷ�Լ��������ͨ����������ֱ���溽���滮���⡣
�����
| [1] | OK K,ANSARI S,GALLAGHER B,et al.Path planning with uncertainty: Voronoi uncertainty fields[C]//2013 IEEE International Conference on Robotics and Automation (ICRA).Piscataway,NJ:IEEE Press,2013:4596-4601. |
| Click to display the text | |
| [2] | GOMEZ E,MARTINEZ S.A comparative study of geometric path planning methods for a mobile robot:Potential field and voronoi diagrams[C]//2013�� International Congress of Engineering Mechatronics and Automation (C��MA).Piscataway,NJ:IEEE Press,2013:1-6. |
| Click to display the text | |
| [3] | CHENG C T, FALLAHI K, LEUNG H, et al. A genetic algorithm-inspired UUV path planner based on dynamic programming[J]. IEEE Transactions on System,2012, 42(6): 1128�C1134. |
| Click to display the text | |
| [4] | CUI C,WANG N,CHEN J.Improved ant colony optimization algorithm for UAV path planning[C]//20145th IEEE International Conference on Software Engineering and Service Science(ICSESS).Piscataway,NJ:IEEE Press,2014:291-295. |
| Click to display the text | |
| [5] | GAUTAM S A,VERMA N.Path planning for unmanned aerial based on genetic algorithm & artificial neural network in 3D[C]//2014 International Conference on Data Mining and Intelligent Computing(ICDMIC).Piscataway,NJ:IEEE Press,2014:1-5. |
| Click to display the text | |
| [6] | ֣����, ��ƽ, ��Խ��, ��. �����������滮�о���״������[J]. �ѧ��,2007, 28(6): 1441�C1446.ZHENG C W, YAN P, DING Y M, et al. Research status and trend of route planning for flying vehicles[J]. Journal of Astronautics,2007, 28(6): 1441�C1446.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [7] | �ν�÷, ��٩. ����A*�㷨��Զ�̵�����ά�����滮�㷨[J]. ����������ѧѧ��,2007, 27(7): 613�C617.SONG J M, LI K. 3D route planning algorithm for long range missiles based on A-star algorithm[J]. Transactions of Beijing Institute of Technology,2007, 27(7): 613�C617.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [8] | ������ҹ��Ϳտ�������ĸ�����[EB/OL].����:����Ժ,�����ί,2010(2010-09-05)[2015-05-17].http://www.gov.cn/jrzg/2010-11/14/content_1745143.html. Opinions on deepening the reform of China��s low-altitude airspace management[EB/OL].Beijing:the State Council,Central Military Commission,2010(2010-09-05)[2015-05-17].http://www.gov.cn/jrzg/2010-11/14/content_1745143.html.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [9] | ռΰΰ, ��ΰ, ���ܳ�, ��. һ�����øĽ�A*�㷨�����˻������滮[J]. �人��ѧѧ��(��Ϣ��ѧ��),2015, 40(3): 315�C320.ZHAN W W, WANG W, CHEN N C, et al. Path planning strategies for UAV based on improved A-star algorithm[J]. Geomatics and Information Science of Wuhan University,2015, 40(3): 315�C320.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [10] | SZCZERBA R J, GALKOWSKI P, GLICKTEIN I S, et al. Robust algorithm for real-time route planning[J]. Aerospace and Electronic Systems,2000, 36(3): 869�C878. |
| Click to display the text | |
| [11] | ���н�, ���ʷ�, �ƽ�. ���ڸĽ�ϡ��A*�㷨�ĸ߳����ٷ����������滮����[J]. ������ҵ��ѧѧ��,2010, 28(2): 182�C186.MENG Z J, HUANG P F, YAN J. Exploring trajectory planning for hypersonic vehicle using improved sparse A-star algorithm[J]. Journal of Northwestern Polytechnical University,2010, 28(2): 182�C186.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [12] | �����, ����, �ߴ���, ��. ��������������˻���ά�����滮����[J]. ����������ѧѧ��,2014, 34(11): 1163�C1168.LIU Q X, WANG J, GAO C X, et al. The UAV 3D route planning method based on the guide points[J]. Transactions of Beijing Institute of Technology,2014, 34(11): 1163�C1168.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [13] | DE FILIPPIS L, GUGLIERI G, QUAGLIOTTI F. Path planning strategies for UAVs in 3D environments[J]. Journal of Intelligent & Robotic Systems,2012, 65(1): 247�C264. |
| Click to display the text | |
| [14] | |
| [15] | ������, ����, л��. ����ƽ��A*�㷨���ƶ�������·���滮[J]. ͬ�ô�ѧѧ��(��Ȼ��ѧ��),2010, 38(11): 1647�C1650.WANG H W, MA Y, XIE Y. Mobile robot optimal path planning based on smoothing A* algorithm[J]. Journal of Tongji University (Natural Science),2010, 38(11): 1647�C1650.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [16] | ������, ��̫��. ��η�����ȷ��Ȩ�ص��о�[J]. �人������ѧѧ��(��Ϣ��������̰�),2007, 29(1): 153�C156.CHANG J E, JIANG T L. Research on the weight of coefficient through analytic hierarchy process[J]. Journal of Wuhan University of Technology (Information & Management Engineering),2007, 29(1): 153�C156.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [17] | ��ѩ, �����, ���ƽ�, ��. ��η�����Ȩ�ؼ��㷽����������Ӧ���о�[J]. ��ѧ��ʵ������ʶ,2012, 42(7): 93�C100.DENG X, LI J M, ZENG H J, et al. Research on computation methods of AHP wight vector and applications[J]. Mathematics in Practice and Theory,2012, 42(7): 93�C100.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [18] | Pilot��s operating handbook:Cessna model 172[EB/OL].KANSAS,Kansas:Cessna Aircraft Company,1978(2005-06-16)[2015-05-17].http://www.skywarriorinc.com/downloads/POH%20BOOKS/172N%20POH.pdf. |
| Click to display the text | |
