| 驾驶人换道决策分析及意图识别算法设计 |
| 丁洁云1, 党睿娜2, 王建强1, 李克强1 |
| 1. 清华大学 汽车安全与节能国家重点实验室, 北京 100084; 2. 中国北方车辆研究所, 北京 100072 |
| Driver lane change decision analysis and intention recognition algorithm |
| DING Jieyun1, DANG Ruina2, WANG Jianqiang1, LI Keqiang1 |
| 1. State Key Laboratory of Automotive Safety and Energy, Tsinghua University, Beijing 100084, China; 2. China North Vehicle Research Institute, Beijing 100072, China |
摘要:
| |||
| 摘要为设计一种能在保证准确率的条件下提高识别效率的驾驶人换道意图识别算法, 分析驾驶人的换道决策, 使用对驾驶人换道决策有影响的环境参数, 设计了基于模糊逻辑理论的综合决策因子, 反映驾驶人做出换道决策的可能性。提出一种基于隐Markov模型的换道意图识别算法, 以综合决策因子与表征车辆横向运动的特征参数为观测变量, 以驾驶人意图为隐状态, 搭建并训练隐Markov模型, 通过其解码方法实现驾驶人的换道意图识别。使用真实驾驶人在驾驶模拟器上进行换道的数据进行算法验证。结果表明:引入综合决策因子作为观测变量之一时, 该换道意图识别算法能保证准确性并提高识别效率。 | |||
| 关键词 :驾驶人换道决策分析,换道综合决策因子,换道意图识别 | |||
| Abstract:An accurate lane change intention recognition algorithm is developed to improve real-time performance. The algorithm analyzes the drivers' lane change decisions to develop a new symbol and a comprehensive decision index (CDI) based on fuzzy theory to assess the probability that the driver will change lanes. Then, the driver intention recognition algorithm is designed based on a hidden Markov model. Using the new symbol as well as representative lateral motion parameters as observed signals, and the driver's intention as the hidden state, a hidden Markov model is built and trained. The driver's intention is recognized by the HMM decoding method. Lane change data collected on a driving simulator are used to verify the overall algorithm performance. The results show that the algorithm with the CDI as one of the observation signals both guarantees the accuracy of the recognition results and improves the real-time performance. | |||
| Key words:driver lane change decision analysislane-change comprehensive decision indexlane change intention recognition | |||
| 收稿日期: 2014-11-09 出版日期: 2015-09-18 | |||
| |||
| 通讯作者:李克强,教授,E-mail:likq@tsinghua.edu.cnE-mail: likq@tsinghua.edu.cn | |||
| 引用本文: |
| 丁洁云, 党睿娜, 王建强, 李克强. 驾驶人换道决策分析及意图识别算法设计[J]. 清华大学学报(自然科学版), 2015, 55(7): 769-774. DING Jieyun, DANG Ruina, WANG Jianqiang, LI Keqiang. Driver lane change decision analysis and intention recognition algorithm. Journal of Tsinghua University(Science and Technology), 2015, 55(7): 769-774. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/或 http://jst.tsinghuajournals.com/CN/Y2015/V55/I7/769 |
图表:
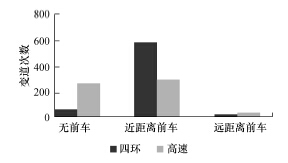 |
| 图1 各换道工况下的变道次数 |
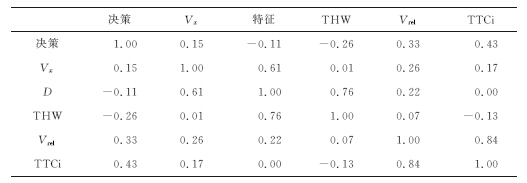 |
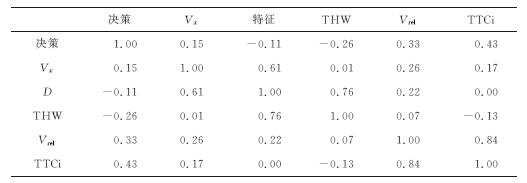
| 表1 决策与各参数间的相关系数 |
 |
| 图2 CDI计算子模块设计框图 |
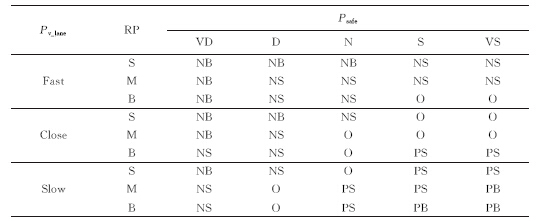 |
| 表2 CDI的模糊计算规则 |
 |
| 图3 用于意图识别的HMM 结构 |
 |
| 图4 驾驶模拟实验台 |
 |
| 图5 换道意图识别结果 |
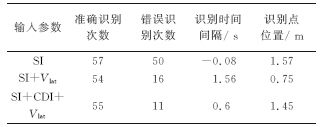 |
| 表3 不同输入参数对应的准确性及识别效率 |
参考文献:
| [1] 李克强. 汽车技术的发展动向及我国的对策[J]. 汽车工程, 2009, 31 (11): 1005-1016. LI Keqiang. Automotive technology development and countermeasures of China [J]. Automotive Engineering, 2009, 31 (11): 1005-1016. (in Chinese) [2] Amditis A, Bimpas M, Thomaidis G, et al. A situation-adaptive lane-keeping support system: Overview of the SAFELANE approach [J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11 (3): 617-629. [3] Kuge N, Yamamura T, Shimoyama O, et al. A Driver Behavior Recognition Method Based on a Driver Model Framework [R]. SAE 2000-01-0349. Detroit, MI, USA: SAE International, 2000. [4] Mizushima T, Raksincharoensak P, Nagai M. Direct yaw-moment control adapted to driver behavior recognition [C]//Proc of the SICE-ICASE International Joint Conference. Busan, Korea, 2006: 534-539. [5] McCall J C, Wipf D P, Trivedi M M, et al. Lane change intent analysis using robust operators and sparse Bayesian learning [J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8 (3): 431-440. [6] LIANG Yulan, Reyes M L, Lee J D. Real-time detection of driver cognitive distraction using support vector machines [J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8 (2): 340-350. [7] 党睿娜. 具有换道辅助功能的车辆自适应巡航控制[D]. 北京: 清华大学, 2013.DANG Ruina. Vehicular Adaptive Cruise Control with Lane Change Assist [D]. Beijing: Tsinghua University, 2013. (in Chinese) [8] 党睿娜, 王建强, 李克强, 等. 高速公路行驶条件下的驾驶人换道特性[J]. 清华大学学报: 自然科学版, 2013, 53 (10): 1481-1485.DANG Ruina, WANG Jianqiang, LI Keqiang, et al. Driver lane change characteristics for various highway driving conditions [J]. Journal of Tsinghua University: Science and Technology, 2013, 53 (10): 1481-1485. (in Chinese) [9] Kondoh T, Yamamura T, Kitazaki S, et al. Identification of visual cues and quantification of drivers' perception of proximity risk to the lead vehicle in car-following situations [J]. Journal of Mechanical Systems for Transportation and Logistics, 2008, 1 (2): 170-180. [10] Shaout A, Colella D, Awad S. Advanced driver assistance systems: Past, present and future [C]//Proc of the 7th International Computer Engineering Conference. Giza, Egypt, 2011: 72-82. [11] DANG Ruina, DING Jieyun, BO Su, et al. A lane change warning system based on V2V communication [C]//Proc of the 17th International Intelligent Transportation Systems Conference. Qingdao, China, 2014: 1923-1928. [12] DING Jieyun, DANG Ruina, WANG Jianqiang, et al. Driver intention recognition method based on comprehensive lane-change environment assessment [C]//Proc of 2014 IEEE Intelligent Vehicle Symposium. Dearborn, MI, USA, 2014: 214-220. |
相关文章:
| ||
