全文HTML
--> --> -->声镊技术起源于声悬浮技术, 是声辐射力原理的应用方向之一[6]. 1990年, Wu[7]基于单超声换能器装置首次实现了青蛙卵的悬浮与移动, 由此提出了声镊的概念. 因此从技术组成来讲, 声镊技术可以分为悬浮和移动两个部分. 一般来说, 声镊装置首先将微粒进行悬浮, 而后通过移动技术可以将微粒搬运到目标位置. 声悬浮技术主要包括驻波场[8]、行波场[9]和声流[10]等基本机理. 通过增加声透镜装置, 还可形成涡旋声场和瓶声场等多种特殊的声悬浮声场形式[11]. 微粒移动技术是声镊装置的关键技术之一, 也是其有别于声悬浮装置的关键点. 大体上来说, 可包括装置移动技术和参数调节技术两种. 所谓装置移动技术, 是通过将声悬浮装置与步进电机相结合, 通过控制步进电机实现声悬浮装置的整体移动, 进而实现悬浮微粒的移动. 参数调节技术主要是通过调节换能器的幅值和相位等基本参数, 实现微粒在声镊装置内部的位置移动.
以驻波场声镊为例, 该装置通常由一对上下正对放置的平面阵列组成. 此时, 可以改变其中某些阵元输出信号的幅值[12], 也可以改变其中某些阵元输出信号的相位[13], 或者同时改变幅值与相位分布[14,15,16]均可以实现微粒水平或竖直移动的目的. 在幅值调节技术中, 通过调节相邻两个换能器之间的声信号幅值差改变势能极小值点的位置, 从而实现微粒的移动. 但此时微粒仅能沿着相邻换能器的中心点连线移动, 而不能沿着其他方向移动, 限制了声镊装置微粒操控的有效范围. 相位调控技术具有精度高、有效范围广等优势, 也是目前多种声镊装置采用的技术途径. 但是目前关于相位调节方法的适用范围和有效精度等问题的研究还非常有限. 本文基于相位合成原理和声辐射力理论建立了换能器阵列相位控制模型, 分析了重力对微粒平衡位置的影响. 基于有限元方法模拟了换能器阵列相位调控方法, 分析了相位调控精度对微粒移动方向和有效操控范围的影响. 本文研究结果对微粒移动路径规划以及设计高精度声镊装置等具有理论意义.
根据Gor’Kov[17]的声辐射力势能理论, 微粒受到的声辐射力可以表达为


























 图 1 换能器与焦点之间的几何关系. 坐标原点位于下方阵列的中心处, x轴和y轴分别平行于方形阵列的两个边. 这里将换能器与聚焦点之间的距离视为换能器表面中心与聚焦点之间的距离, z轴垂直指向上方阵列. 图中, 某换能器中心到聚焦点在该阵元平面上的投影点之间的距离为
图 1 换能器与焦点之间的几何关系. 坐标原点位于下方阵列的中心处, x轴和y轴分别平行于方形阵列的两个边. 这里将换能器与聚焦点之间的距离视为换能器表面中心与聚焦点之间的距离, z轴垂直指向上方阵列. 图中, 某换能器中心到聚焦点在该阵元平面上的投影点之间的距离为




Figure1. Geometric relationship between the transducer and the focal point. Origin of the coordinate is located at the center of the lower array, and the x-axis and y-axis are parallel to the two sides of the square array. Here, the distance between the transducer and the focus point is regarded as the distance between the center of the transducer surface and the focusing point, and the z-axis points vertically to the upper array. In the figure, the distance between the center of a certain transducer and the projection point of the focal point on the array plane is





由于声压中含有时空周期变化的指数项, 所以可以运用相位调制的方法, 使声压聚焦于目标点. 假设上下两个阵列相距






















平面移动是声镊的典型操作之一, 本文主要讨论粒子在平面上移动的情况. 微粒从某一位置移动至下一个位置的过程中系统发生的变化包括: 极小势能点的移动和微粒的受力移动. 该过程如图2(a)—(c)所示. 当形成声压聚焦点时, 微粒被束缚于该聚焦点处, 即势能极小值点处. 通过改变各换能器发射信号的相角, 从而在平面内改变聚焦点的位置, 即实现了势能极小值点的移动. 由于聚焦点的移动, 微粒暂时地移动到力的汇聚区的边缘, 在不脱离力的汇聚区范围的情况下, 微粒受到1个指向势能极小值点的力的作用, 在没有水平方向外力干扰的情况下, 微粒最终会运动至聚焦点处.
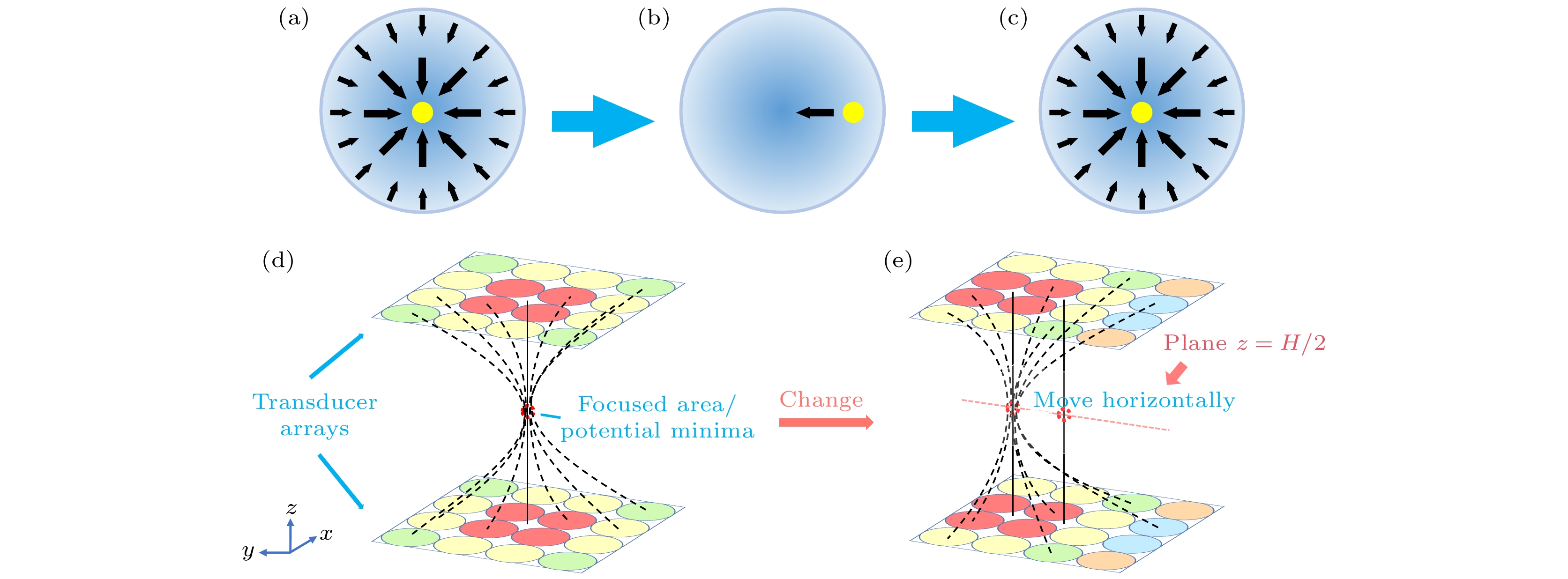 图 2 (a)?(c)微粒在平面内移动过程的俯视示意图, 其中(a)微粒被束缚在聚焦点处, 黑色箭头代表力的分布; (b)聚焦点移动后微粒与力的汇聚区相对位置示意图, 黑色箭头代表微粒所受力的方向; (c)微粒回到聚焦点; (d), (e)力的汇聚区移动的示意图. 上下两块正对的正方形区域为换能器阵列所在平面, 上嵌的圆圈代表换能器, 不同颜色代表不同的相位. 力的汇聚区以红色虚线圆圈表示, 黑色虚线簇代表声线, 黑色实线为辅助线, 用以标明力的汇聚区位置, 粉色虚线为力的汇聚区移动轨迹所在直线
图 2 (a)?(c)微粒在平面内移动过程的俯视示意图, 其中(a)微粒被束缚在聚焦点处, 黑色箭头代表力的分布; (b)聚焦点移动后微粒与力的汇聚区相对位置示意图, 黑色箭头代表微粒所受力的方向; (c)微粒回到聚焦点; (d), (e)力的汇聚区移动的示意图. 上下两块正对的正方形区域为换能器阵列所在平面, 上嵌的圆圈代表换能器, 不同颜色代表不同的相位. 力的汇聚区以红色虚线圆圈表示, 黑色虚线簇代表声线, 黑色实线为辅助线, 用以标明力的汇聚区位置, 粉色虚线为力的汇聚区移动轨迹所在直线Figure2. (a)?(c) Schematic top views of the movement of particles in a plane: (a) Particles are bounded at the focus point, and the black arrow represents the distribution of acoustic radiation force (ARF); (b) schematic diagram of the relative position of the particle and the convergent area of the force after the focus point moves, with a black arrow representing the direction of the force acting on the particle; (c) particle returning to the focus point. (d), (e) Schematic diagrams of the movement of the force convergence area. The upper and lower two square areas facing each other are the planes where the transducers are located. The circles embedded on the planes represent the transducers, and different colors represent different phases. The force convergence area is represented by a red dashed circle. The black clusters of dashed lines represent acoustic rays. The black solid line is an auxiliary line to indicate the location of the force convergence area, and the pink dashed line is the straight line where the trajectory lies.
以图2(d)和图2(e)中描述的过程来说明具体的移动方法. 当实现如图2(d)所示聚焦时, 换能器相位分布情况为:





将操控面选定为平面z = H/2, 如图2(e)所示. 驻波场中声辐射力沿轴向的分布如图3所示, 声辐射力和声压一样沿着图中的z轴周期变化, 正负代表其方向, 最大值介于两个最小值之间. 不考虑重力的影响时, 粒子悬浮于声辐射力为0的汇聚点处. 但由于微粒自身重力不可忽略, 对于悬浮会产生一定的影响. 若能够悬浮, 粒子位置将在力的汇聚零点之下, 相邻的力的最大值之上[21], 即图3中红色虚线之间的区域. 当声压为一简谐波时, 声辐射力的波长为声压波长的一半, 所以声辐射力极值和相邻的声辐射力零值相距




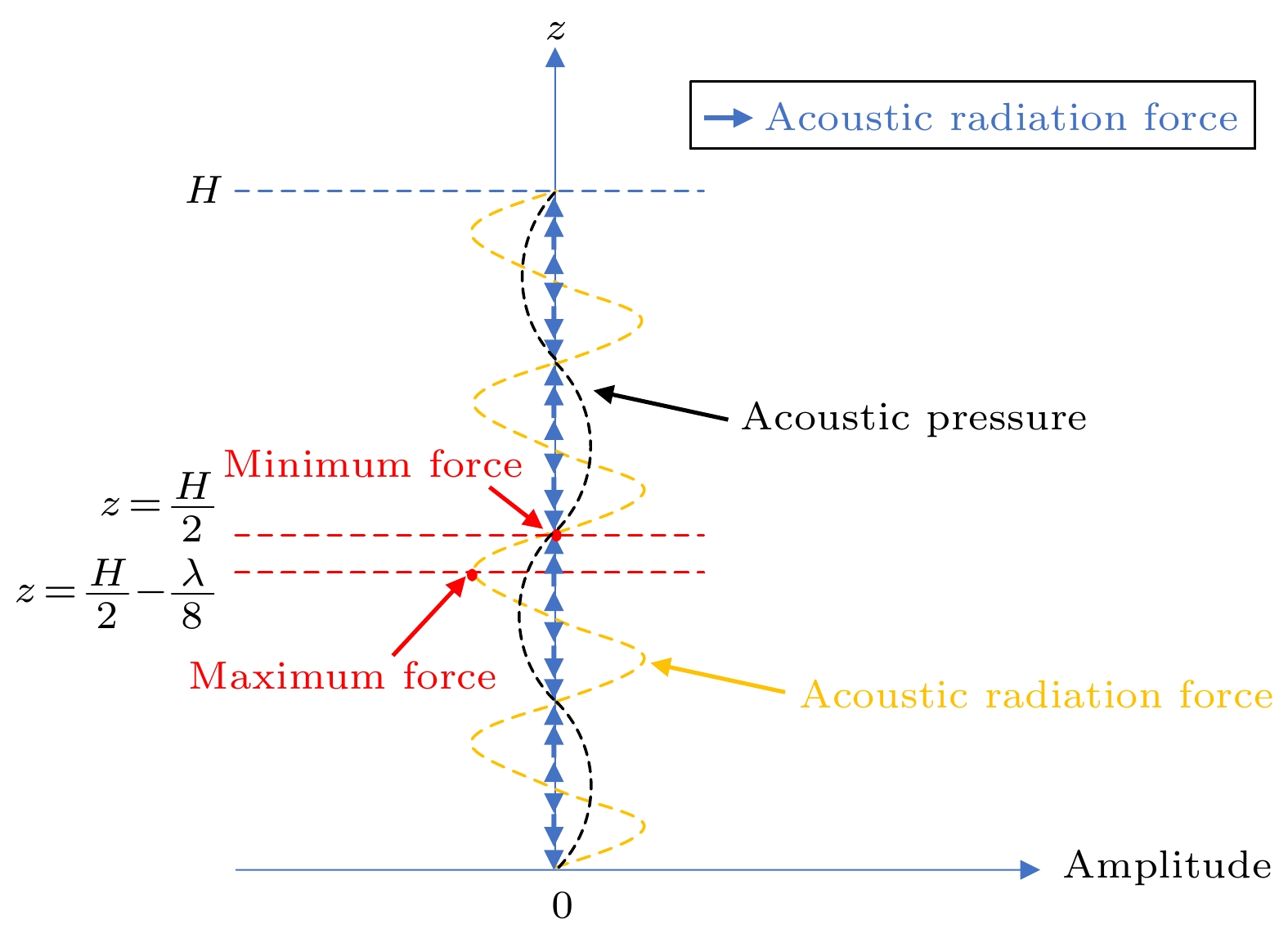 图 3 某对换能器在垂直方向产生的驻波声场中的相关元素示意图. 黑色虚线为声压的垂向分布, 黄色虚线为声辐射力的垂向分布, 蓝色箭头的长短和方向代表声辐射力的大小和方向. z轴上的H/2高度处应为力的汇聚点, 其下方1/8个波长处应为相邻的1个力的极大值对应的高度
图 3 某对换能器在垂直方向产生的驻波声场中的相关元素示意图. 黑色虚线为声压的垂向分布, 黄色虚线为声辐射力的垂向分布, 蓝色箭头的长短和方向代表声辐射力的大小和方向. z轴上的H/2高度处应为力的汇聚点, 其下方1/8个波长处应为相邻的1个力的极大值对应的高度Figure3. Schematic diagram of the relevant elements in the standing wave acoustic field generated by a pair of transducers in the vertical direction. The black dashed line is the vertical distribution of acoustic pressure, the yellow dashed line is the vertical distribution of the ARF. The length and direction of the blue arrow represent the magnitude and direction of the ARF. The height of H/2 on the z axis should be the convergence point of the force, and the one-eighth of the wavelength below it should be the height corresponding to the adjacent maximum force.



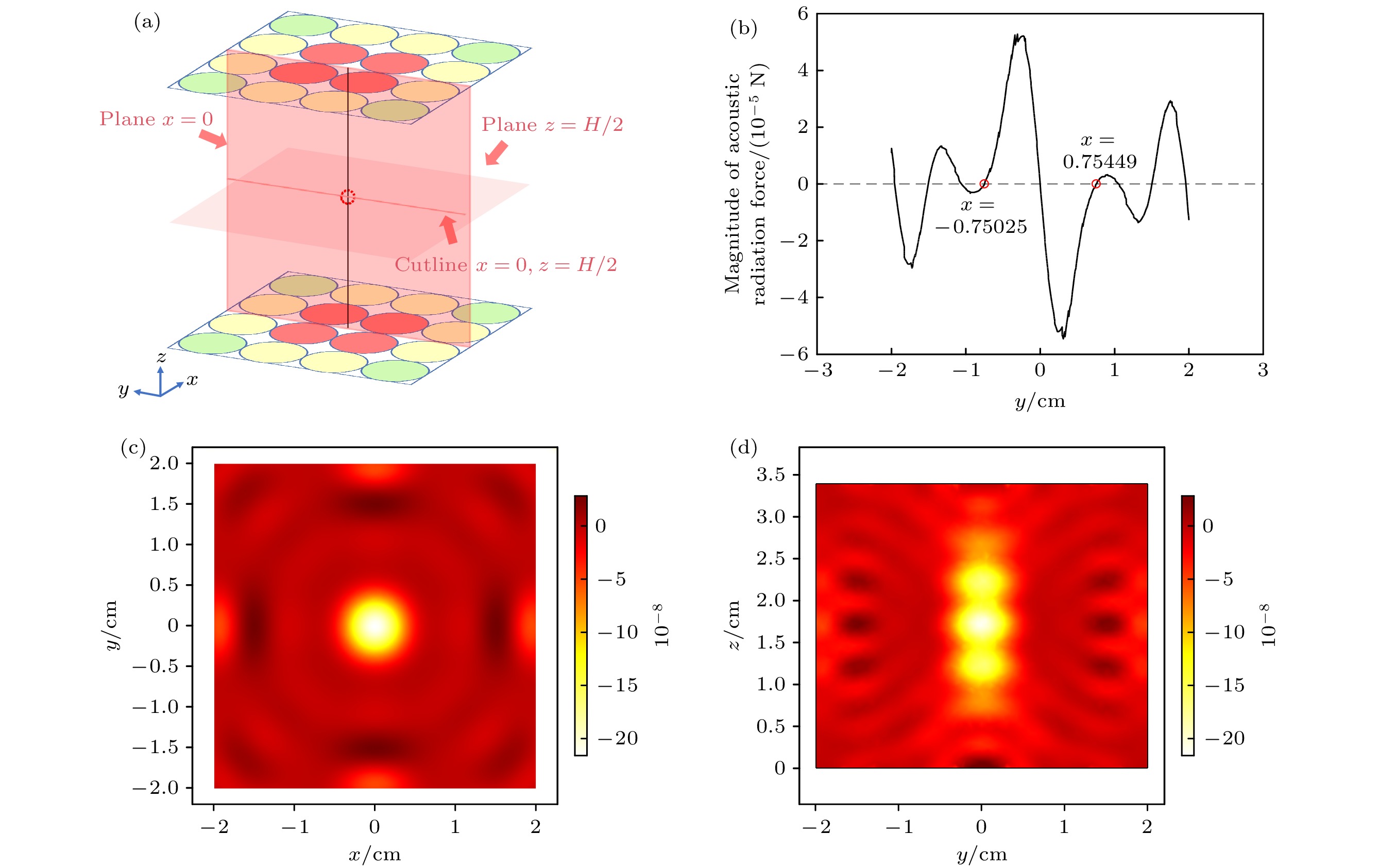 图 4 聚焦点在中心时声辐射力势能的分布 (a)聚焦点在中心时的相位分布示意以及截面z = H/2、截面x = 0、截线x = 0、截线z = H/2所在位置; (b)截线x = 0, z = H/2上声辐射力在y方向的分量; (c)平面z = H/2上的声辐射力势能的分布; (d)平面x = 0上的声辐射力势能分布
图 4 聚焦点在中心时声辐射力势能的分布 (a)聚焦点在中心时的相位分布示意以及截面z = H/2、截面x = 0、截线x = 0、截线z = H/2所在位置; (b)截线x = 0, z = H/2上声辐射力在y方向的分量; (c)平面z = H/2上的声辐射力势能的分布; (d)平面x = 0上的声辐射力势能分布Figure4. Distribution of ARF potential energy when the focal point is at the center: (a) Phase distribution diagram when the focal point is at the center and the position of section z = H/2, section x = 0 and section line x = 0, z = H/2; (b) component of the ARF in the y direction on the section line x = 0, z = H/2; (c) distribution of ARF potential energy on the plane z = H/2; (d) distribution of ARF potential energy on the plane x = 0.
由于微粒的移动和力的汇聚区移动相关, 汇聚区的移动特性将关系到微粒移动的稳定性. 对于平面内点到点的移动, 不失一般性地将其视为在二维网格点上的移动. 为了简单起见, 选择正交格点. 格点间距的选择和声辐射力的分布密切相关. 在操控面上, 从过聚焦点的一条截线上看声辐射力分布, 声辐射力围绕焦点形成1个圆形汇聚区, 从中心向外侧先增大后减小至0, 零值的位置即为该汇聚区域的边界. 图4(b)中的两点数据显示此时平面上的声辐射力的汇聚区半径约为0.89




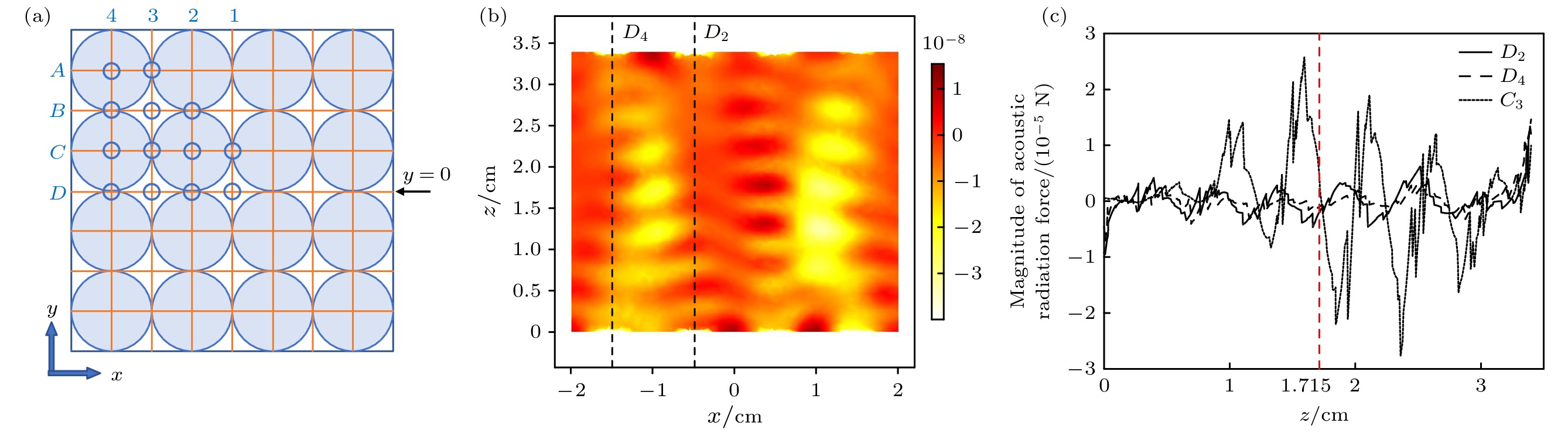 图 5 (a)格点化操控表面以及部分聚焦位置. 根据对称性将所有点归类为图中的10个实线蓝圈所标出的点, 3个虚线蓝圈标出的点为补充遗漏路径需要绘制的点. 经线从中心向外围以递增数字1?4标注, 纬线自上而下以A, B, C, D标注. 这样任意一点可以以字母与数字的组合命名, 字母在前数字在后, 如中心处的点为D1点. (b)聚焦点在C3处时, y = 0截面上声辐射力势能的分布. 横坐标为x轴刻度, 纵坐标为z轴刻度. 图中标注出了D2和D4处的垂直截线. 当聚焦点位于C3时, 取D2, D4, C3这3个位置处的3条垂直截线, 绘制了沿其分布的垂向声辐射力于(c)图中, 正负代表方向, 红色虚线标注出高度z = 1.715 cm
图 5 (a)格点化操控表面以及部分聚焦位置. 根据对称性将所有点归类为图中的10个实线蓝圈所标出的点, 3个虚线蓝圈标出的点为补充遗漏路径需要绘制的点. 经线从中心向外围以递增数字1?4标注, 纬线自上而下以A, B, C, D标注. 这样任意一点可以以字母与数字的组合命名, 字母在前数字在后, 如中心处的点为D1点. (b)聚焦点在C3处时, y = 0截面上声辐射力势能的分布. 横坐标为x轴刻度, 纵坐标为z轴刻度. 图中标注出了D2和D4处的垂直截线. 当聚焦点位于C3时, 取D2, D4, C3这3个位置处的3条垂直截线, 绘制了沿其分布的垂向声辐射力于(c)图中, 正负代表方向, 红色虚线标注出高度z = 1.715 cmFigure5. (a) Grid on the manipulation plane and part of the focus position. According to symmetry, all points are represented as the points marked by the 10 solid blue circles in the figure, and the points marked by the 3 dashed blue circles are the points that need to be drawn to supplement the missing path. Longitude lines are marked with increasing numbers 1?4 from the center to the periphery, and latitude lines are marked with A, B, C, and D from top to bottom. In this way, any point can be named with a combination of letters and numbers, with letters in the front and numbers in the back, for example, the point at the center is the D1 point. (b) Distribution of the ARF potential energy on the y = 0 section when the focal point is at C3. The coordinates of x axis and z axis are recorded on abscissa and ordinate respectively. The positions of D2 and D4 are marked in the figure. The distribution of vertical ARF along three vertical cutlines D2, D4, C3 are depicted in panel (c) when focusing point is located at C3. The signs of ARF represent their directions. Red dashed line marks the latitude of z = 1.715 cm.
此时, 格点化后的阵列表面共有49个点. 考虑到在边界处声压难以聚焦, 或者聚焦效率极低, 且微粒一旦移出边界便不可控, 所以边界处并未划分格点. 为了便于指代, 纬线自上而下以字母标注, 经线从右至左以数字标注, 指代时字母在前数字在后, 比如阵列中心处的点称为D1点. 根据对称性, 将这些点归类为10个点, 相邻点之间的转移路径, 加上B4到B3, C3到B2以及D2到C1之间的3条特殊路径即可以囊括平面格点上所有的移动情形.
当力的汇聚区移动, 微粒能够跟随移动需要满足两个条件. 首先, 要将微粒稳定在操控平面附近; 其次, 微粒要位于汇聚区内. 对于第1点, 聚焦点移动后, 原位置处力的极小值点上下移动范围不能过大, 且原位置处减弱后的极大垂向声辐射力必须依然大于重力, 这样保证操控基本上位于水平面内. 对于第2点, 只有当原位置在焦点移动后依然位于汇聚区内, 微粒在平面内才可获得向中心移动的作用力, 否则该移动路径不稳定.
聚焦点可能位于10个点的任意一处, 而聚焦点所在的每一个位置都可以视为从该点周围的某一点移动而来. 遍历聚焦点的所有可能位置, 选取各位置处H/2高度附近的力的极小值点处所对应的平面和其下方相邻的一个力的极大值点处所对应的平面, 通过这些平面上水平力的分布情况判断周围的点是否包含在汇聚区内, 从而判断移动是否满足第2个条件. 按理想情况来看, 即势能场不发生变形, 极大值点和极小值点的位置都会相对固定, 分别位于





以C3点为例, 图5(b)给出了当聚焦点在C3位置处时

将格点细化一倍, 格点间距从0.58


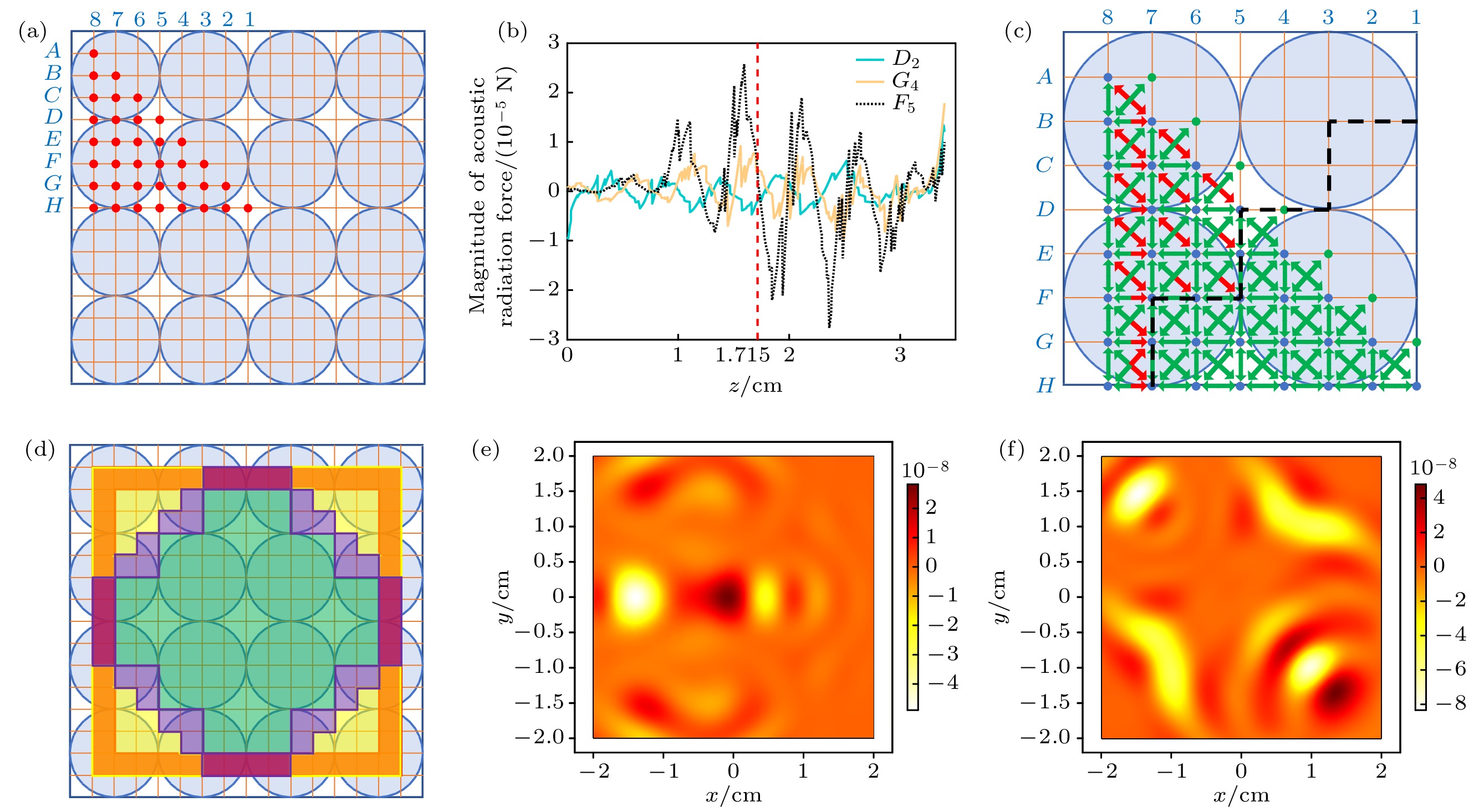 图 6 (a)细化后的格点平面图, 图中的红点区域为囊括所有移动情形的最小研究区域, 格点的命名法则与之前的粗格点相同. (b)聚焦点位于细格点平面F5处(粗格点平面C3处)时, 格点F5 (C3), G4以及粗格点平面中D2处垂直截线上垂向声辐射力随高度的分布情况. 红色虚线标出1.715 cm高度. (c)红色箭头代表不稳定移动的路径, 绿色箭头代表稳定移动的路径. 黑色虚线右下方为稳定移动的区域, 左上方为不稳定移动的区域. (d)绿色区域为可稳定操控微粒的区域; 紫色区域内跨对角线向中心移动是不稳定的; 黄色区域内斜跨对角线向中心和向外移动是不稳定的; 红色区域内沿网格线向中心移动不稳定; 橙色区域为红、黄交叠区域, 深紫色区域为红、黄、紫交叠区域. (e), (f)聚焦点分别位于H7和B7处时, 操控平面上声辐射力势能的分布
图 6 (a)细化后的格点平面图, 图中的红点区域为囊括所有移动情形的最小研究区域, 格点的命名法则与之前的粗格点相同. (b)聚焦点位于细格点平面F5处(粗格点平面C3处)时, 格点F5 (C3), G4以及粗格点平面中D2处垂直截线上垂向声辐射力随高度的分布情况. 红色虚线标出1.715 cm高度. (c)红色箭头代表不稳定移动的路径, 绿色箭头代表稳定移动的路径. 黑色虚线右下方为稳定移动的区域, 左上方为不稳定移动的区域. (d)绿色区域为可稳定操控微粒的区域; 紫色区域内跨对角线向中心移动是不稳定的; 黄色区域内斜跨对角线向中心和向外移动是不稳定的; 红色区域内沿网格线向中心移动不稳定; 橙色区域为红、黄交叠区域, 深紫色区域为红、黄、紫交叠区域. (e), (f)聚焦点分别位于H7和B7处时, 操控平面上声辐射力势能的分布Figure6. (a) Refined grid plane. The red dot area in the figure is the smallest research area that includes all moving situations. The nomenclature of the points is the same as the previous coarse grid points. (b) Distribution of vertical ARF along 3 vertical cutlines located at F5 (C3 in the coarse grid), G4 and D2 (the coarse grid) respectively. Red dashed line marks the height of 1.715 cm. The red arrows in panel (c) represent the path of unstable movement, and the green arrows represent the path of stable movement. Below the black dotted line is the stable moving area, and the rest part is the unstable moving area. The green area in panel (d) is the area where the particles can be stably manipulated. The purple, yellow and red area are areas where movement along diagonal of grids towards the center, movement along diagonal of grids towards and away from the center, movement along grid line towards the center are ubstable; orange area is the superposition of red area and yellow area, dark purple area is the superposition of red, yellow and purple area. (e), (f) Distribution of ARF potential energy on manipulation plane when the focus points are located at H7 and B7.
对于稳定的点, 选取中间高度


将稳定与不稳定的路径绘制在图6(c)中, 可以明显地看出, 不稳定的路径集中于虚线左上部分, 虚线右下部分均可以实现定向移动. 不稳定的路径最多的是跨格点对角线的路径, 从中心向外辐射的或者从外向内汇聚的都有. 沿着格线的移动路径也有一部分属于不稳定的范畴, 它们基本是从最外围一层格线向内层移动的路径. 在聚焦点从中心H1向顶点A8移动的过程中, 力的汇聚区在到达D5点之后开始明显变形, 由圆形逐渐变为椭圆形, 短轴沿着H1—A8方向(图6(f)). 在这样的形变下, 沿对角的路径往往是不稳定的. 而在聚焦点从经线1到经线8的垂直移动的过程中, 力的汇聚区在到达H7点之后开始发生明显变形, 从圆形变成“包子形” (图6(e)), “包子”向中心一侧凸起, 所以微粒从最外层经线向内层经线的移动总是不稳定的. 这样来看, 不稳定的移动路径大多发生在边界处.
根据对称性, 从图6(c)延伸可得到整个操控平面上的路径稳定性情况. 图6(d)对路径进行了分类. 其中绿色覆盖的区域为完全稳定的路径, 其余部分为不稳定的移动路径. 外围有一圈红色所覆盖的区域, 代表粒子沿格线从外侧向内侧移动的路径是不稳定的; 紫色覆盖区域表示沿对角线向中心移动的路径缺乏稳定性; 黄色所覆盖的区域代表沿对角线向中心汇聚和向外发散的路径均缺乏稳定性; 交叠区域同时包含两种类型的不稳定路径. 有交叠的区域集中于最外一层的网格上, 代表了在这个区域内有多种不稳定路径的存在. 这种现象的产生在路径规划中涉及到绿色区域之外的区域时应注意回避这些路径.
除了格点间距过大和靠近边缘处力的汇聚区发生形变会导致移动不稳定外, 平面阵列的规模也会对移动稳定性造成一定的影响. 加大阵列的规模, 使行和列都有所增加, 可以使边缘离中心更远, 从而扩大稳定移动区域的范围. 本文的工作对于变相位型声镊的研究与设计具有一定的参考意义.
