全文HTML
--> --> -->研究者们区分出高超边界层转捩过程中一些典型的模态. 对于二维或者轴对称的边界层, 二次模态波占主导, 例如高超声速圆锥或二维平板边界层[2]. 对于实际飞行中更常见的三维边界层, 例如飞行器的后掠翼或者带攻角的圆锥流动, 一个典型的模态是横流不稳定性. 横流不稳定性的产生是由于边界层中存在垂直于无黏流线方向的压力梯度, 由此产生一个垂直于无黏流线方向的速度分量, 称为横流分量. 在边界层外缘和模型壁面, 横流分量为0, 因此在边界层内的合速度剖面是三维的, 并且存在拐点, 由此产生一个无黏不稳定性, 即横流不稳定性.
低速流动中, Saric等[3]和Bippes与Bippes[4]总结了三维边界层中的横流模态, 将横流模态的首次失稳分为定常模态和非定常模态. 定常模态主要存在于真实飞行环境或静来流条件下, 初始幅值由模型上的粗糙度引入. 非定常模态主要存在于噪声环境中, 初始幅值由来流中的速度扰动引入. Poll[5]在后掠圆柱流动中, 测到了一个高频的扰动波信号, 该不稳定波发生在转捩为湍流边界层之前. Malik等[6]通过稳定性分析, 说明了Poll测到的高频不稳定性是首次横流模态的二次不稳定性, 并将二次不稳定性分为了Type I和Type II两种类型.
在高超声速流动中, 有很多的研究集中在首次定常横流涡和定常横流涡的二次不稳定性. 风洞实验方面, Edelman和Schneider[7]使用了温敏漆(temperature-sensitive paint, TSP)技术得到了有攻角圆锥上的热流条带, 并指出该条带由定常横流涡引起的. 将热流条带的分布与脉动压力传感器得到的高频信号的幅值云图进行对比, 说明了该信号是定常横流涡的二次不稳定性, 并得到了二次不稳定性的增长率. Craig和Saric[8]使用热线测量了带攻角圆锥周向的流量云图, 通过平均流量云图和高频带的脉动信号幅值分布, 得到了定常横流涡的形态以及Type I的二次不稳定性的分布. Corke等[9]和Arndt等[10]使用了离体的高频皮托脉动压力测量, 得到了圆锥周向截面的平均皮托压力和脉动压力分布, 从而得到了定常横流涡及其二次不稳定性的分布. 数值模拟方面, Moyes等[11]用直接数值模拟(direct numerical simulation, DNS)研究了6°攻角圆锥上的横流不稳定性, 观察到频率为70—155 kHz的Type I二次不稳定性和频率为140—300 kHz的Type II二次不稳定性. 徐国亮等[12]通过稳定性分析的方法, 在马赫6后掠翼流动中, 发现了存在于定常横流涡沟部的新的二次不稳定性模态.
而对于高超边界层中的非定常横流波, 风洞实验大多使用对脉动信号的点测量来得到. Ward[13]使用Kulite传感器测量得到了带攻角圆锥上的非定常横流波, 在单位雷诺数6.5 × 106—12.3 × 106 m–1时, 峰值频率在22—40 kHz之间. 同时, 使用传感器阵列, 得到了横流波的传播方向和相速度. Borg等[14,15]使用Kulite传感器测量得到了HIFiRE-5上的非定常横流波, 得到了峰值频率是30—50 kHz. Craig和Saric[8]测量得到了中心频率为35 kHz的非定常横流波, 发现其能量集中在定常横流涡上扫的高梯度区域. Cork等[9]和Arndt等[10]测量得到了非定常横流波的幅值与定常涡幅值分布, 并得到了他们之间的相互作用. 数值模拟方面, Li等[16]利用稳定性分析得到了带攻角圆锥表面的非定常横流不稳定性, 特征频率在靠近上游区域为25 kHz, 流动发展到下游, 会变为10 kHz.
在以上对高超声速边界层中横流不稳定性的研究, 大多在带攻角的圆锥和椭圆锥上进行, 而不管是在静音还是噪声模式中, 都是定常和非定常横流涡并存的状态. 根据Ward[13]和Corke等[9]的研究成果, 定常横流涡会对非定常横流波的发展有明显的影响. 目前还没有对单纯的非定常横流波存在的条件下, 边界层中不稳定波发展情况的研究. 并且, 在带攻角圆锥或者椭圆锥上, 流线是弯曲的, 想要将传感器准确布置在扰动波幅值的增长方向, 是十分困难的.
本文选用的实验模型是平板构型的75°后掠的三角翼. 我们之前的研究中, 通过对平行壁面方向的边界层进行瞬态结构的流动显示, 得到了行进的大致相互平行的大涡结构, 并分析了该结构的结构角、波长和频率[17]. 本研究中, 在垂直于三角翼前缘的方向布置了Kulite高频脉动压力传感器, 测量了三角平板上非定常横流波的频率及幅值增长, 利用传感器阵列得到了横流波的波角及相速度特性. 利用TSP技术, 得到了三角翼上的热流分布, 并将脉动压力的功率谱密度(power spectrum density, PSD)与热流分布进行了对比, 得到了边界层内扰动波发展与壁面热流强度的关系.
实验模型是三角平板, 如图1所示. 模型后掠角为75°, 长度为500 mm, 宽度为250 mm, 厚度为7 mm. 头部和前缘为圆弧, 前缘半径为3.5 mm. 坐标系O-x-y定义如图1所示, 模型头部为原点O, 沿中心线向下游为x轴, 垂直于x轴向上为y轴. 为方便结果的分析, 将垂直于前缘方向定义为n轴.
 图 1 三角平板示意图
图 1 三角平板示意图Figure1. Schematic diagram of the delta wing.
在模型上安装了9个Kulite传感器, 命名为K1—K9. 传感器的坐标列在表1中. K1—K4传感器沿着一条垂直于前缘的线布置, 之间间隔15 mm, K2距离前缘35 mm, 距离三角翼顶点O在x方向为400 mm. K8距离三角翼前缘也为35 mm, 距离顶点O在x方向为300 mm. 在靠近K3和K8处分别设置了两个传感器阵列, 用来测量非定常横流波的传播方向和相速度. 两个传感器阵列(K3-K5-K6和K7-K8-K9)的坐标如下表所列.
| Sensor No. | x/mm | y/mm |
| K3 | 403.88 | 59.14 |
| K5 | 406.88 | 56.14 |
| K6 | 409.88 | 56.14 |
| K7 | 300 | 50.84 |
| K8 | 300 | 46.84 |
| K9 | 302 | 52.84 |
表1Kulite阵列的坐标
Table1.Coordinate of the two Kulite arrays.
使用的Kulite传感器型号是Kulite XCQ-062-30A. 该传感器固有频率超过300 kHz, 能够对100 kHz以下信号的频率及幅值进行有效测量. 根据供应商给出了数据, 该传感器的测量误差在万分之五以内. 数据采集系统使用DH-5927. 采样频率为200 kHz, 数据采集长度为3 s, 即600000个点. 使用功率谱密度对压力数据进行了分析, 采用的是welch方法, 窗口为宽度1024个数据点的汉宁(hanning)窗, 窗口重叠率50%, 由此得到的PSD结果的频率分辨率为0.195 kHz.
此外, 使用了温敏漆(temperature-sensitive paint, TSP)技术对模型表面的热流分布进行了测量, 已经成功应用于高超声速边界层转捩研究中[17,20-22]. 温敏漆由中科院应用化学研究所研制, 使用365 nm单波长的LED灯进行激发, 在相机镜头前放置460 nm长波通滤光片, 使进入CCD的光为能够反映温度的长波光. TSP实验中, 相机典型曝光时间为3 ms, 采样频率为16 Hz. 使用标定曲线可以将CCD相机得到的灰度信息转化成温度信息, 之后通过Cook-Felderman方法[23]将温度转化为热流. TSP技术对温度的测量误差可由标定曲线的拟合误差引入, 由实验点到标定曲线的相关系数为0.995, 误差极小. 同时, 通过TSP技术得到的温度噪声约为0.5 ℃, 因此, 温度分辨率也约为0.5 ℃.
本文还使用了基于纳米示踪的平面激光散射(nano-tracer based planar laser scattering, NPLS)技术对三角平板边界层平行于前缘方向的瞬态流动结构进行了可视化. 该技术具有高时空分辨率和高信噪比, 示踪粒子的跟随性已经由Zhao等[24]进行了验证, 纳米粒子半径为50 nm以下, 可以对流场结构进行精细地刻画. 在超声速和高超声速边界层转捩研究中, 本技术已经有了大量应用[22,25,26]. 本技术使用532 nm的双腔Nd:YAG激光器作为光源, 单脉冲最大能量为350 mJ, 激光脉冲时间为6 ns. 相机为跨帧CCD相机, 分辨率为2048像素 × 2048像素.
3.1.非定常横流波的典型结果
选取攻角α = 5°, 单位雷诺数Re∞ = 4.83 × 106 m–1为典型状态来说明三角翼迎风面上边界层流动特征. 图2为三角翼迎风面的热流分布云图. 偏蓝色部分热流较低, 边界层为层流, 绿色部分热流高, 边界层为湍流, 两者之间的分界线为边界层转捩位置. 由图2可知, 在x > 340 mm时, 靠近外缘的部分边界层转捩阵面光滑并大致平行于前缘, 显示出此位置边界层转捩呈现准二维特征, 受头部影响小. 图2中的小黑点为Kulite传感器所在位置. 图2中椭圆所圈位置有高热流的出现, 且出现的位置上下对称, 是由于试验段为直连设计, 试验段上窗口和下窗口的玻璃与试验段之间有小的台阶, 马赫6气流流过时会有小激波出现, 该激波打到模型上引起热流升高. 另一方面, 上下两侧高热流处的幅值并不完全相同, 可能是由于上下窗口台阶高度不完全相同, 小激波的强度也会有差异. 超声速流动中, 下游的流动不会影响上游, 因此, 小激波打到三角平板侧边时, 影响的区域处于椭圆所圈高热流区域的下游. 三角翼上流线大致是沿着x方向的, 因此K2—K4上游的流动距离小激波影响区域较远, 对应位置的前缘感受性与扰动波发展基本不会受到影响.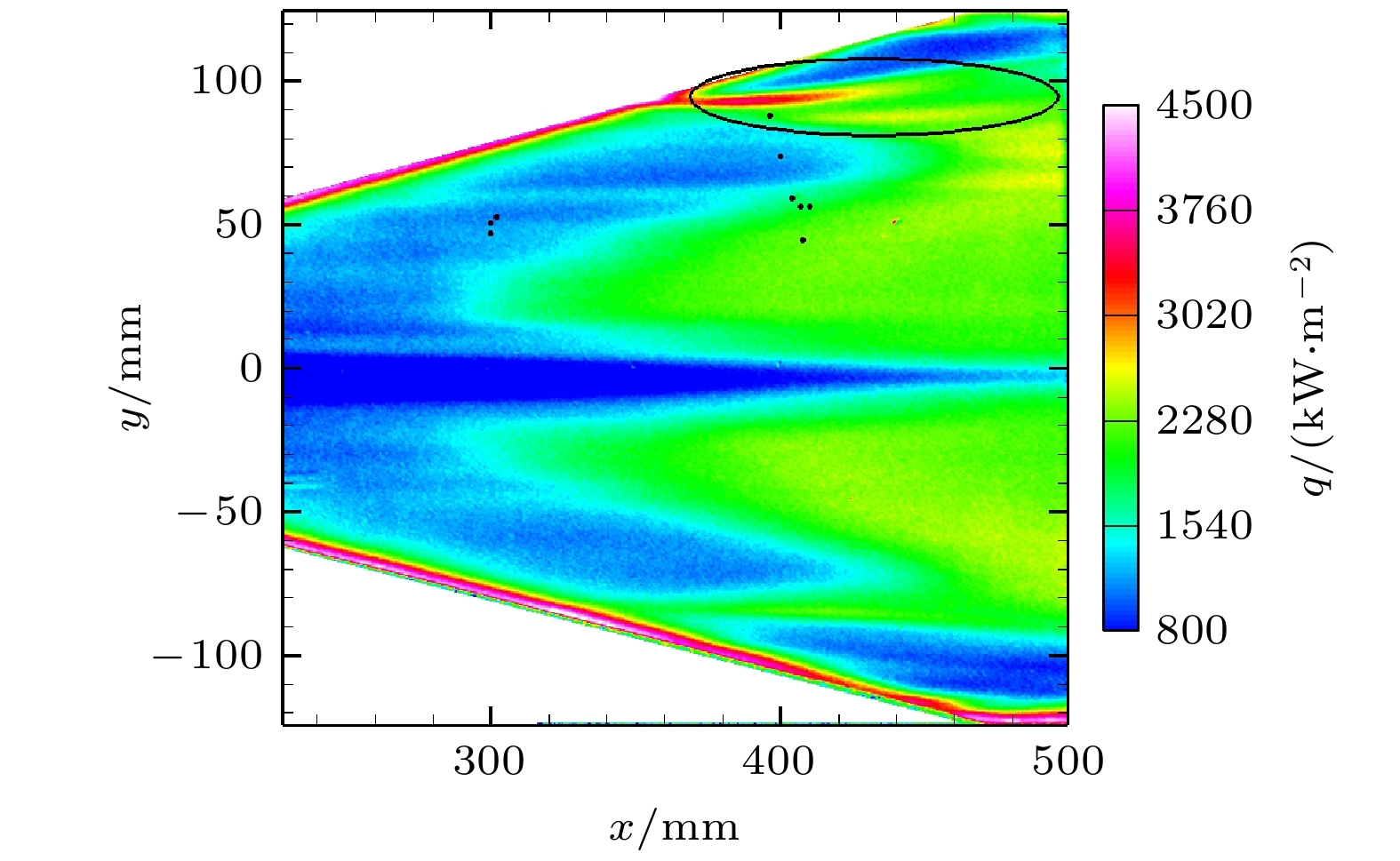 图 2 三角翼迎风面热流云图(Re∞ = 4.83 × 106 m–1, α = 5°)
图 2 三角翼迎风面热流云图(Re∞ = 4.83 × 106 m–1, α = 5°)Figure2. Heat flux contour on the windward (Re∞ = 4.83 × 106 m–1, α = 5°).
对三角平板壁面的脉动压力进行测量, K1—K4测点的PSD结果如图3所示. K1测点的PSD在2 kHz左右有一个峰值, 结合图2的TSP结果, K1处在试验段壁面产生的激波影响范围内, 所以不能反映边界层中的扰动波行为. 在K2处于TSP图像中低热流区域, 此处边界层为层流, 所以K2所测的PSD曲线中能够观察到10 kHz的峰值. 三角翼可以看做是对称的两个后掠翼, 后掠翼上边界层转捩是典型的横流不稳定性主导的[27,28]. 并且, 该10 kHz的频率与Li等[16]观察到的10—25 kHz的圆锥上非定常横流不稳定波频率相符, 也与Ward[13]在圆锥上观察到的20—44 kHz的频率相近. 因此, K2测得的10 kHz的峰值信号很可能是非定常横流波的频率.
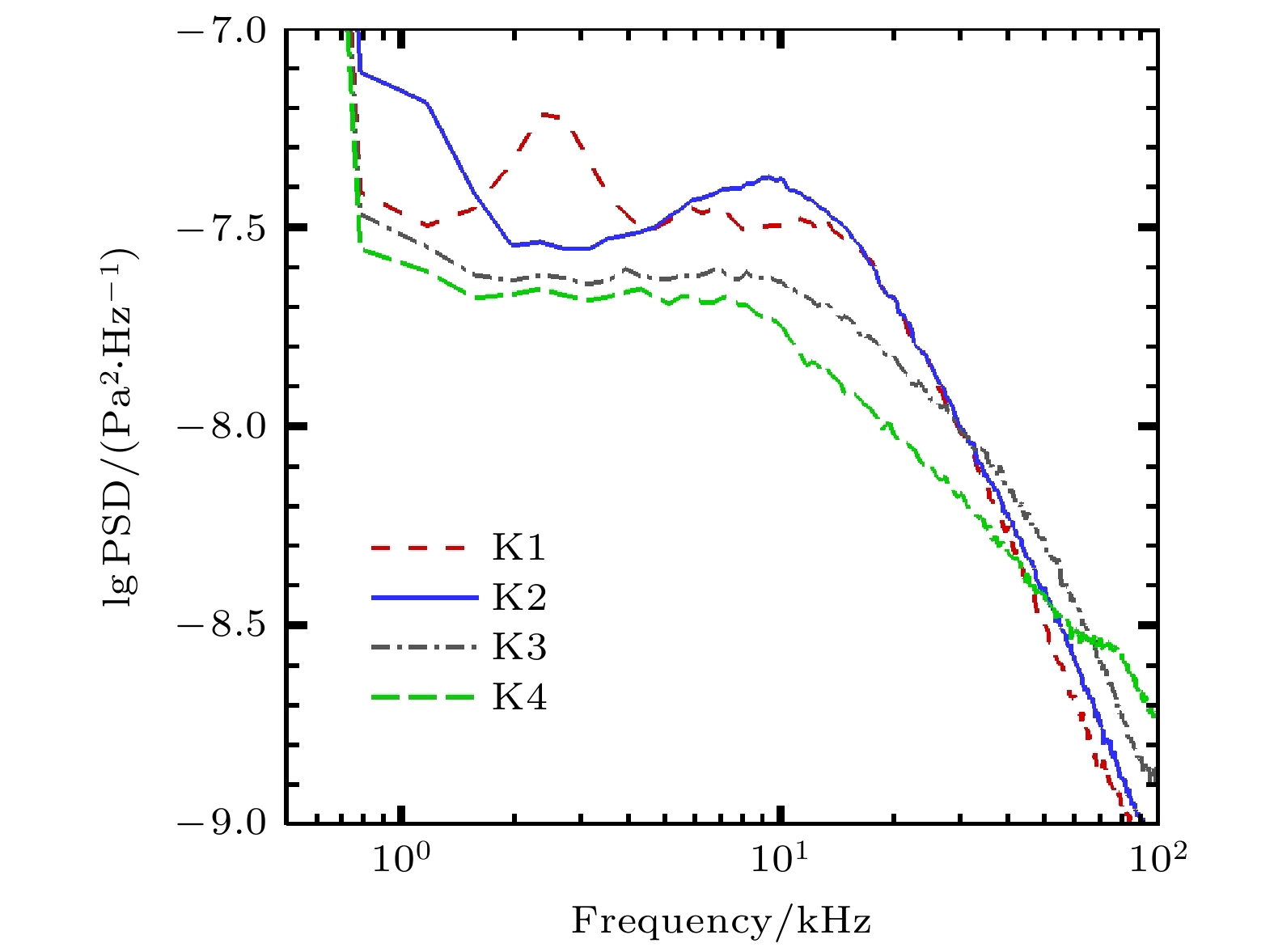 图 3 K1—K4测点的功率谱密度结果(Re∞ = 3.51 × 106 m–1, α = 5°)
图 3 K1—K4测点的功率谱密度结果(Re∞ = 3.51 × 106 m–1, α = 5°)Figure3. PSD results from sensors K1—K4 (Re∞ = 3.51 × 106 m–1, α = 5°).
为进一步确认10 kHz的信号为非定常横流波, 采用NPLS技术对边界层流场结构进行了流动显示验证, 结果如图4所示. NPLS的激光片光垂直于平板壁面, 并与三角翼前缘平行且距离前缘36 mm. 图片的灰度值与密度相关[29]. 由图4中可以看到大尺度的规则向下游翻卷的大涡结构. 大涡的形态与赵磊[30]和Xu等[12]通过数值模拟得到的横流涡的形态相符. 图片的空间分辨率为85.7 μm/像素, 从而得到横流波的波长约为27.5 mm. 并且, 在不同的时刻, NPLS图像中涡结构的位置不同, 所以图4观察到的边界层结构为非定常横流波. 结合脉动压力信号的PSD结果, 我们可知, 在三角翼靠近前缘部分, 确实是非定常横流波占主导, 该横流波的特征频率为10 kHz.
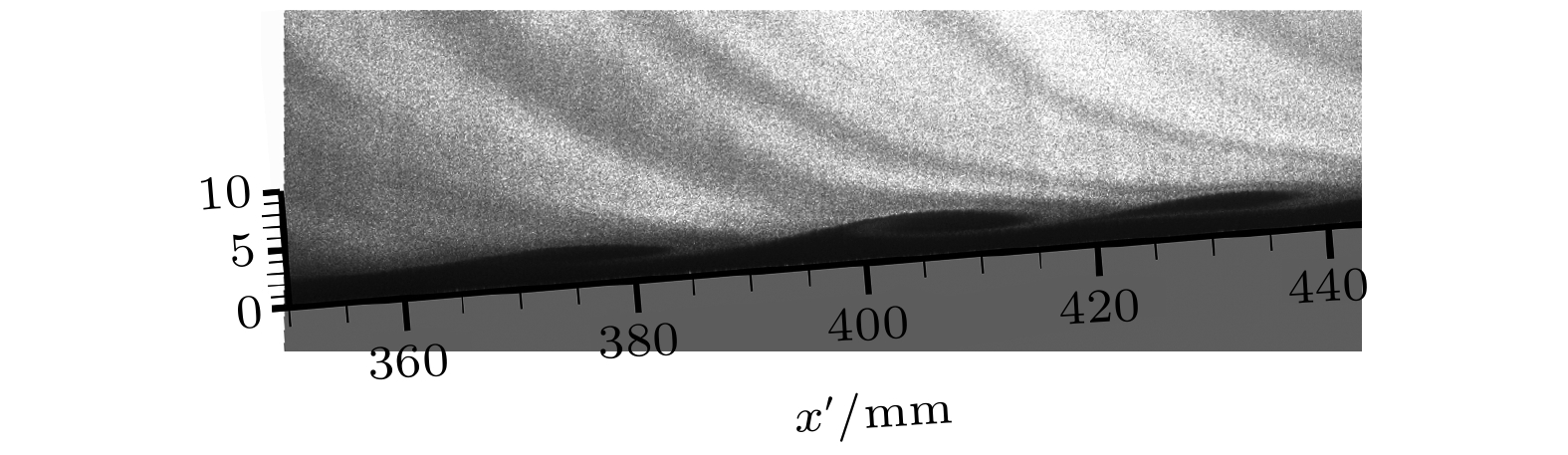 图 4 三角翼迎风面平行于前缘方向的NPLS图片 (Re∞ = 4.83 × 106 m–1, α = 5°, n = 36 mm)
图 4 三角翼迎风面平行于前缘方向的NPLS图片 (Re∞ = 4.83 × 106 m–1, α = 5°, n = 36 mm)Figure4. NPLS image on the plane parallel to the leading edge (Re∞ = 4.83 × 106 m–1, α = 5°, n = 36 mm).
综上所述, TSP图像中观察到的x > 340 mm区域的边界层转捩阵面与前缘平行, 转捩阵面光滑, 因此没有观察到定常横流涡的存在; Kulite所测高频脉动压力信号的PSD结果表明在层流区域存在10 kHz的峰值信号, 与非定常横流波信号相近; 通过NPLS技术, 在平行前缘的方向观察到向下游卷起的规则的大涡结构, 该结构与数值模拟得到的横流涡结构一致, 并且涡是行进而非定常的. 因此, x > 340 mm区域边界层转捩行为是由非定常横流波主导的, 且特征频率为10 kHz左右.
2
3.2.扰动波的空间发展
图5是5°攻角时, 三角翼迎风面K2—K4传感器所测脉动压力信号的PSD结果, 从图5(a)到图5(c)单位雷诺数分别为2.43×106, 4.83×106和14.21 × 106 m–1. 当单位雷诺数为2.43 × 106 m–1时, K2, K3和K4三个传感器都能够测到峰值频率在10 kHz附近的扰动波信号. K2, K3和K4的PSD幅值分别是10–7.98, 10–7.68和10–7.95 kPa2·Hz–1, 非定常横流波的幅值先增加至饱和然后衰减. 当单位雷诺数为4.83×106 m–1时, 只有K2能够观察到明显的峰值信号. 当单位雷诺数为14.21×106 m–1时, 3个传感器位置处的扰动波都以60 kHz以内的宽频信号为主, 没有明显的峰值信号.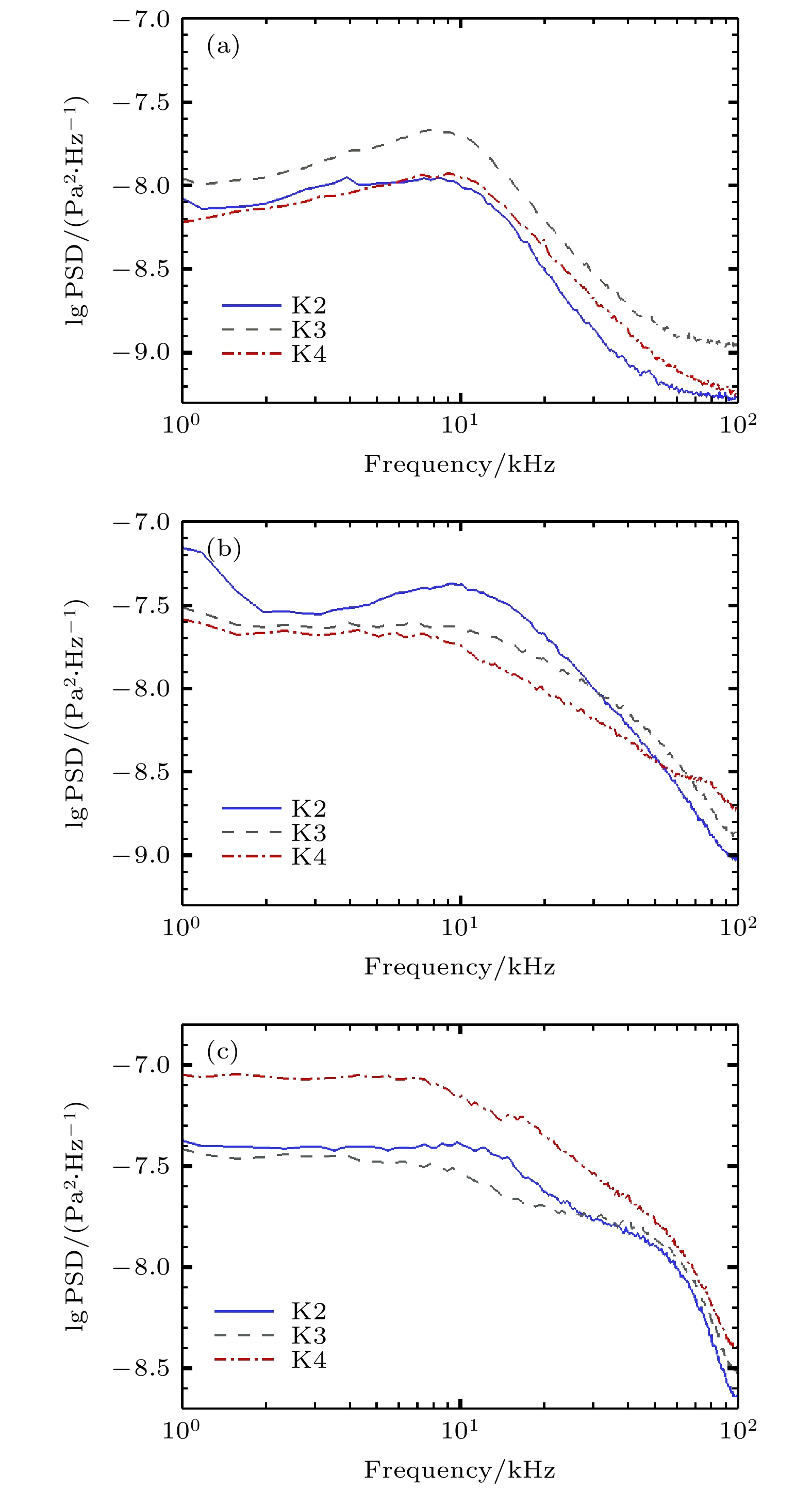 图 5 三角翼5°攻角迎风面K2-K4所测脉动压力的PSD结果 (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1
图 5 三角翼5°攻角迎风面K2-K4所测脉动压力的PSD结果 (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1Figure5. PSD results of sensors K2-K4 on the windward side at α = 5°: (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1.
为了说明各传感器位置边界层的状态, 对三角翼迎风面进行了TSP实验, 实验结果图6所示. 当单位雷诺数为2.43 × 106 m–1时, 模型表面热流总体都比较低, 除了试验段台阶引起的高热流区域外, 沿垂直于模型前缘方向不能观察到热流的升高, 因此边界层一直处于层流状态. 当单位雷诺数为4.83 × 106 m–1时, K2处于层流状态, K3靠近转捩阵面, 而K4已经处于热流较高的位置. 当单位雷诺数为14.21 × 106 m–1时, 由于单位雷诺数的增加, 模型表面的整体热流升高, 同时, 边界层转捩位置大幅度提前, K2—K4三个传感器都处于转捩完成的阶段.
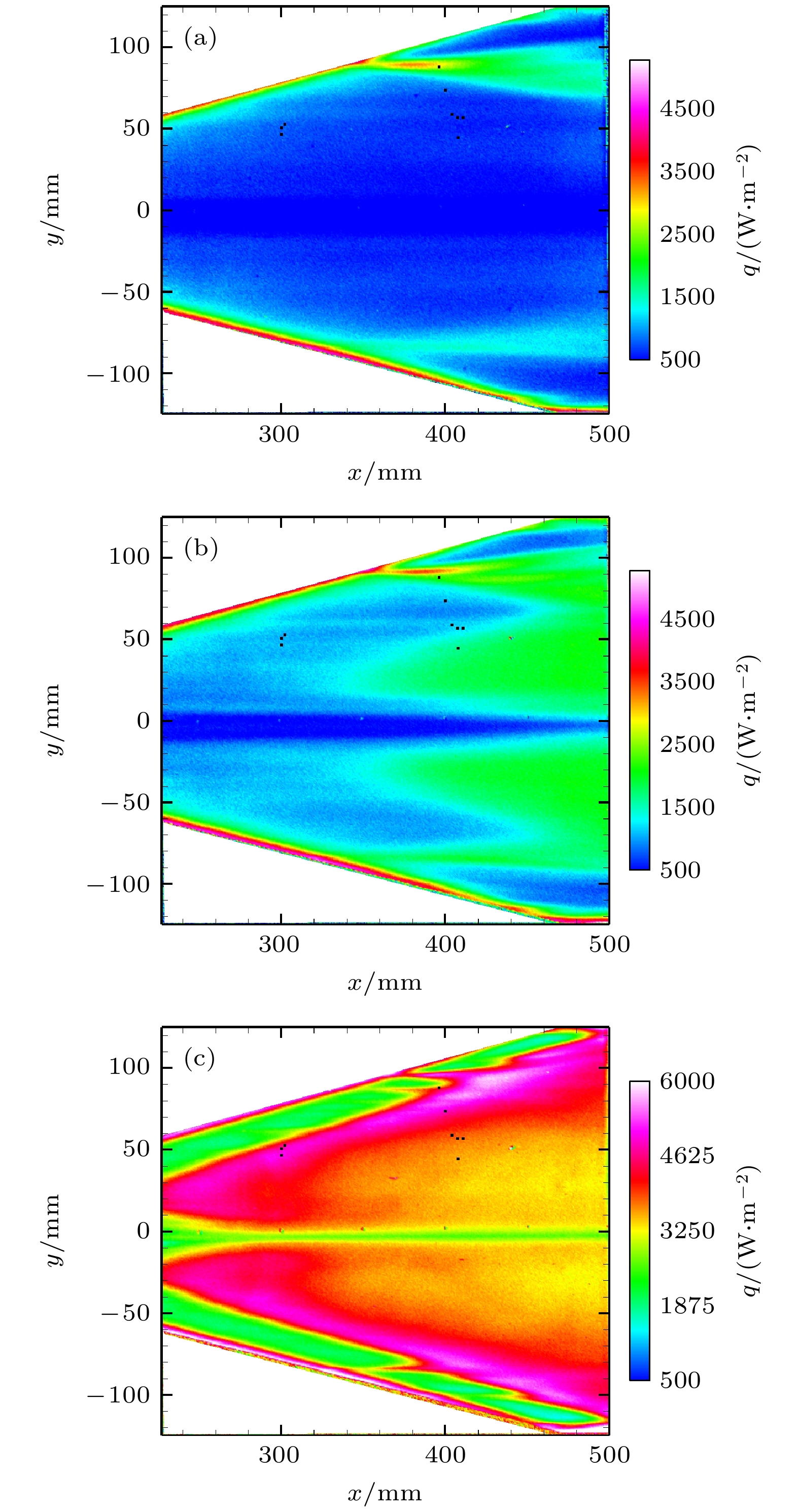 图 6 三角翼5°攻角迎风面TSP结果 (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1
图 6 三角翼5°攻角迎风面TSP结果 (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1Figure6. TSP results on the windward side at α = 5°: (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1.
从TSP图像提取出沿垂直于三角翼前缘方向(n方向)的热流, 如图7所示. 将所取热流曲线的位置是K1—K4所在直线处, n = 0 mm处为三角平板最前缘. 图7中, 3条曲线的第一个热流峰值是受洞壁台阶的影响产生的. 当单位雷诺数为2.43 × 106 m–1时, 在受洞壁影响的热流峰值之后, 热流曲线单调下降, 说明边界层处于完全层流的状态, 对应图5中的PSD结果, K2—K4传感器都能够测到明显的热流峰值, 并且能够观察到非定常横流波先增长然后衰减的过程. 当单位雷诺数为4.83 × 106 m–1时, 热流在x = 40 mm位置附近开始升高, 边界层开始转捩, 到x = 63 mm附近热流达到最大值, 边界层转捩完成. 因此, K2处于层流阶段, K3处于转捩阶段, K4处于转捩完成的初期. 对比PSD结果, 只有K2能够测到10 kHz附近的峰值信号. 当单位雷诺数为14.21 × 106 m–1时, K2—K4传感器都处于边界层转捩完成阶段, PSD结果也呈现典型的低频占主导的湍流边界层特征.
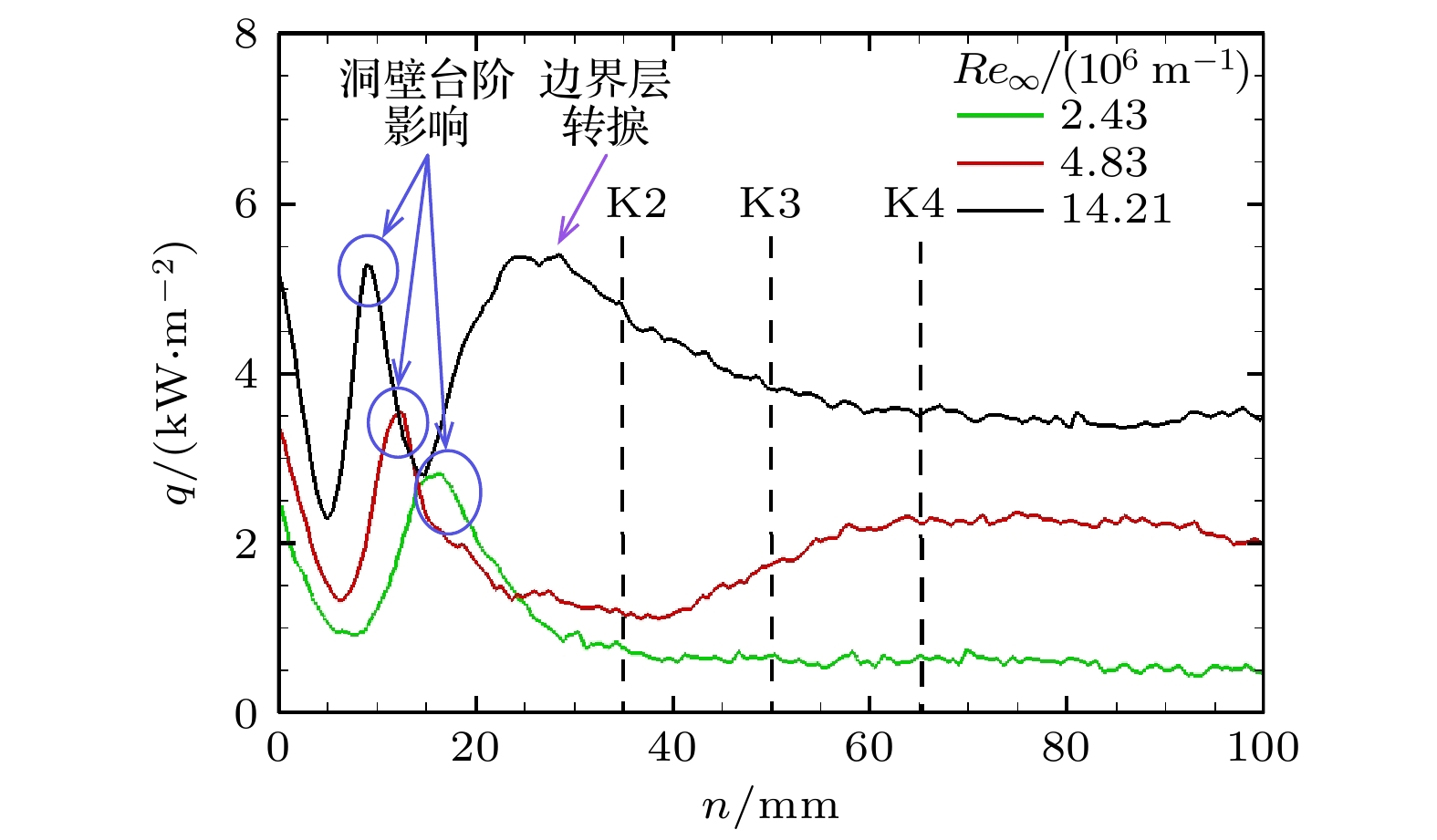 图 7 由图6得到的K2—K4所在直线的热流分布
图 7 由图6得到的K2—K4所在直线的热流分布Figure7. Heat flux profiles in the line of sensors K2—K4 from Fig. 6.
2
3.3.扰动波随雷诺数的发展
为了研究扰动波幅值随雷诺数的发展, 将K2和K3传感器在不同单位雷诺数条件下测到脉动压力信号的PSD结果分别表示在图8(a)和图8(b)中. 对于K2传感器, 在单位雷诺数分别为2.43 × 106, 3.52 × 106和4.83 × 106 m–1时能够观察到明显的非定常横流波信号, 峰值频率都为10 kHz左右. 随着单位雷诺数的增加, 峰值信号的幅值增加, 而所对应的峰值频率右移. 这是由于雷诺数增加, 边界层变薄, 非定常横流波的幅值与边界层厚度成正比, 一般情况下, 特征频率与波长成反比, 波长变小, 则特征频率增加. 当单位雷诺数为7.12 × 106和11.01 × 106 m–1时, PSD曲线的峰值消失, 取而代之的是宽频的低频信号. 而当单位雷诺数为14.21 × 106 m–1时, 小于60 kHz部分的低频成分幅值降低.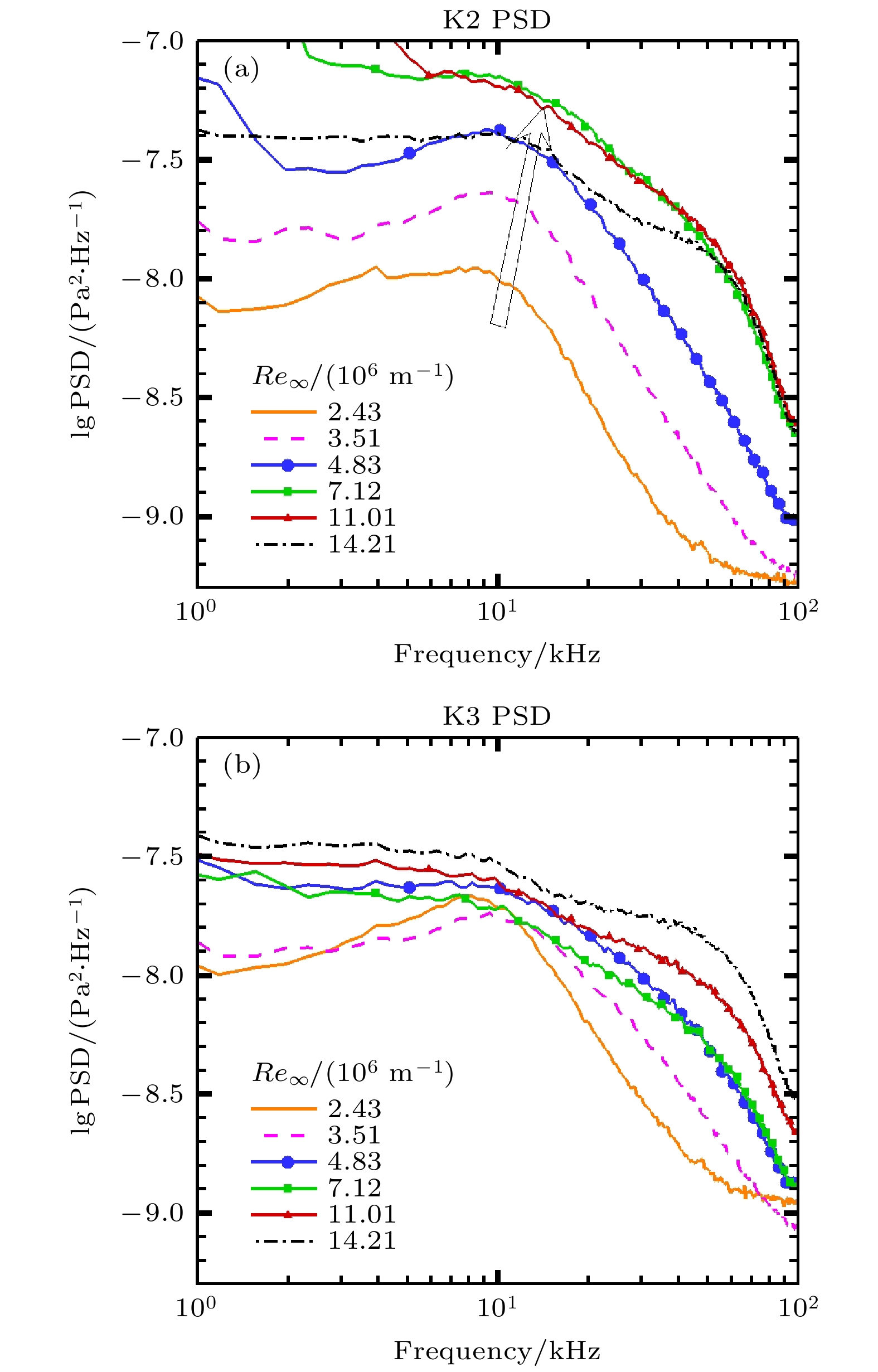 图 8 K2和K3传感器得到的5°攻角三角翼迎风面的PSD结果 (a) K2; (b) K3
图 8 K2和K3传感器得到的5°攻角三角翼迎风面的PSD结果 (a) K2; (b) K3Figure8. PSD results of K2 and K3 in different Reynold number on the windward at α = 5°: (a) K2; (b) K3.
对于K3传感器, 由于在更靠近下游的位置, 在较小的单位雷诺数(4.83 × 106 m–1)时就不能够观察到非定常横流波的峰值信号. 并且, 单位雷诺数由2.43 × 106 m–1增加到3.51 × 106 m–1时, 特征频率增加, 此规律与K2传感器相同. 然而, 单位雷诺数为3.51 × 106 m–1时非定常横流波的幅值比2.43 × 106 m–1时还要小, 可能是由于此雷诺数下横流行波的幅值随雷诺数的变化已经进入了衰减阶段.
将不同频率的幅值随雷诺数的变化取出, 表示在图9中, 图9(a)和图9(b)分别是K2和K3处的结果. 在频率较低时, 总体的幅值比频率较高处大, 但幅值增长情况又有不同. 在K2位置, 3个频率处的扰动波都在单位雷诺数7.1 × 106 m–1附近开始饱和. 在小于雷诺数7.1 × 106 m–1时, 10 kHz处的扰动波增长速度明显不如30和50 kHz快. 而在K3位置处, 由于比K2更靠近下游, 10 kHz的非定常横流波信号在2.4 × 106 m–1附近就已经趋于饱和状态, 而30和50 kHz的扰动波信号在单位雷诺数4.8 × 106 m–1之前还有明显的幅值增加. 而在单位雷诺数大于7.1 × 106 m–1时, 3个频率的扰动波信号幅值都有所增加, 但10 kHz扰动波增加幅度明显不如30和50 kHz的. 总的来说, 在K2位置, 能够观察到10, 30和50 kHz扰动波在单位雷诺数7.1 × 106 m–1时开始饱和, 但30和50 kHz的扰动波在此单位雷诺数小于7.1 × 106 m–1时增长率比10 kHz更高. 在K3位置, 总体表现为较高频成分(如30和50 kHz)有较快的增长, 而10 kHz的低频成分增长程度很小.
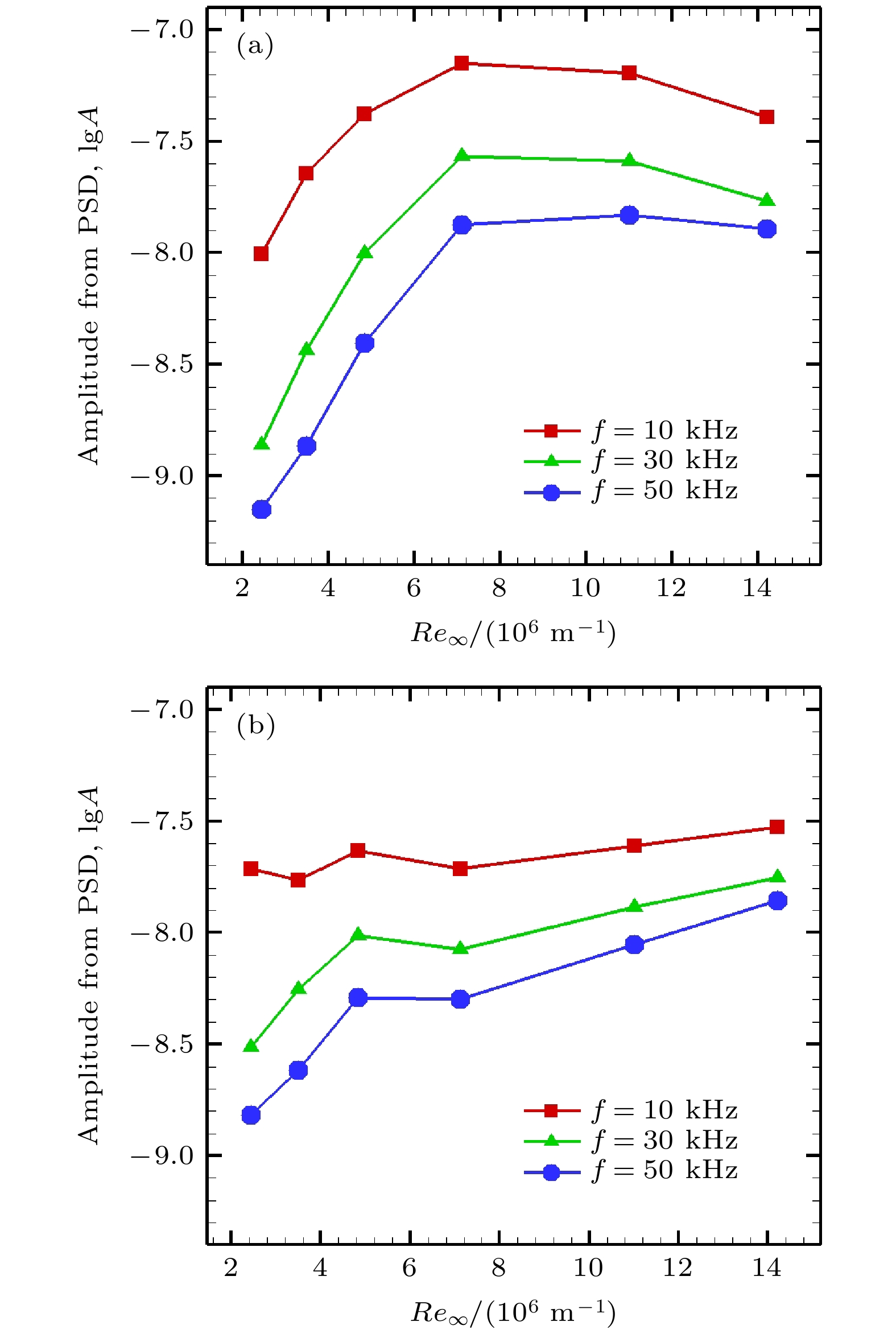 图 9 不同频率下的幅值随雷诺数增长曲线 (a) K2处; (b) K3处
图 9 不同频率下的幅值随雷诺数增长曲线 (a) K2处; (b) K3处Figure9. Growth of the amplitude in different frequency: (a) K2; (b) K3.
2
3.4.攻角对非定常横流波增长的影响
为了探索攻角对非定常横流波扰动发展的影响, 对10°攻角下三角翼迎风面进行了高频脉动压力测量, PSD结果显示在图10中. 图10(a)—(c)分别对应的单位雷诺数是2.43 × 106, 4.83 × 106, 和11.10 × 106. 图10中只有在单位雷诺数为2.43 × 106 m–1时的K2测点可以观察到10 kHz左右的横流波信号峰值, 在单位雷诺数4.83 × 106 m–1时, 在10 kHz处有一个微微的鼓包, 而没有明显的峰值. 此外, 在单位雷诺数为11.10 × 106 m–1时的K4测点, 观察到了一个峰值频率为50 kHz左右的高频信号. 在雷诺数2.43 × 106 m–1时, K4测点已经处于非定常横流波信号衰减到观察不到峰值的阶段, 在单位雷诺数11.10 × 106 m–1的状态下, 该50 kHz的信号显然不是非定常横流波信号, 该信号可能是发展到转捩后期阶段横流不稳定性产生的二次失稳, 具体的模态还有待进一步的研究. 图 10 10°攻角下K2-K4得到的PSD结果 (a) 2.44 × 106 m–1; (b) 4.83 × 106 m–1; (c) 11.10 × 106 m–1
图 10 10°攻角下K2-K4得到的PSD结果 (a) 2.44 × 106 m–1; (b) 4.83 × 106 m–1; (c) 11.10 × 106 m–1Figure10. PSD results of sensors K2-K4 on the windward side at α = 10°: (a) 2.44 × 106 m–1; (b) 4.83 × 106 m–1; (c) 11.10 × 106 m–1.
将10°攻角、不同雷诺数时K2和K3得到的PSD曲线表示在图11中. 由图11可知, 在K2位置, 10°攻角时仅在单位雷诺数为2.44 × 106和3.49 × 106 m–1时能够观察到峰值频率为10 kHz左右的非定常横流波信号, 而当5°攻角时一直到单位雷诺数为4.83 × 106 m–1都可以观察到. 而K3位置处, 图中所有雷诺数下的PSD曲线都没有明显的峰值信号, 显示出此时边界层可能已经变为湍流.
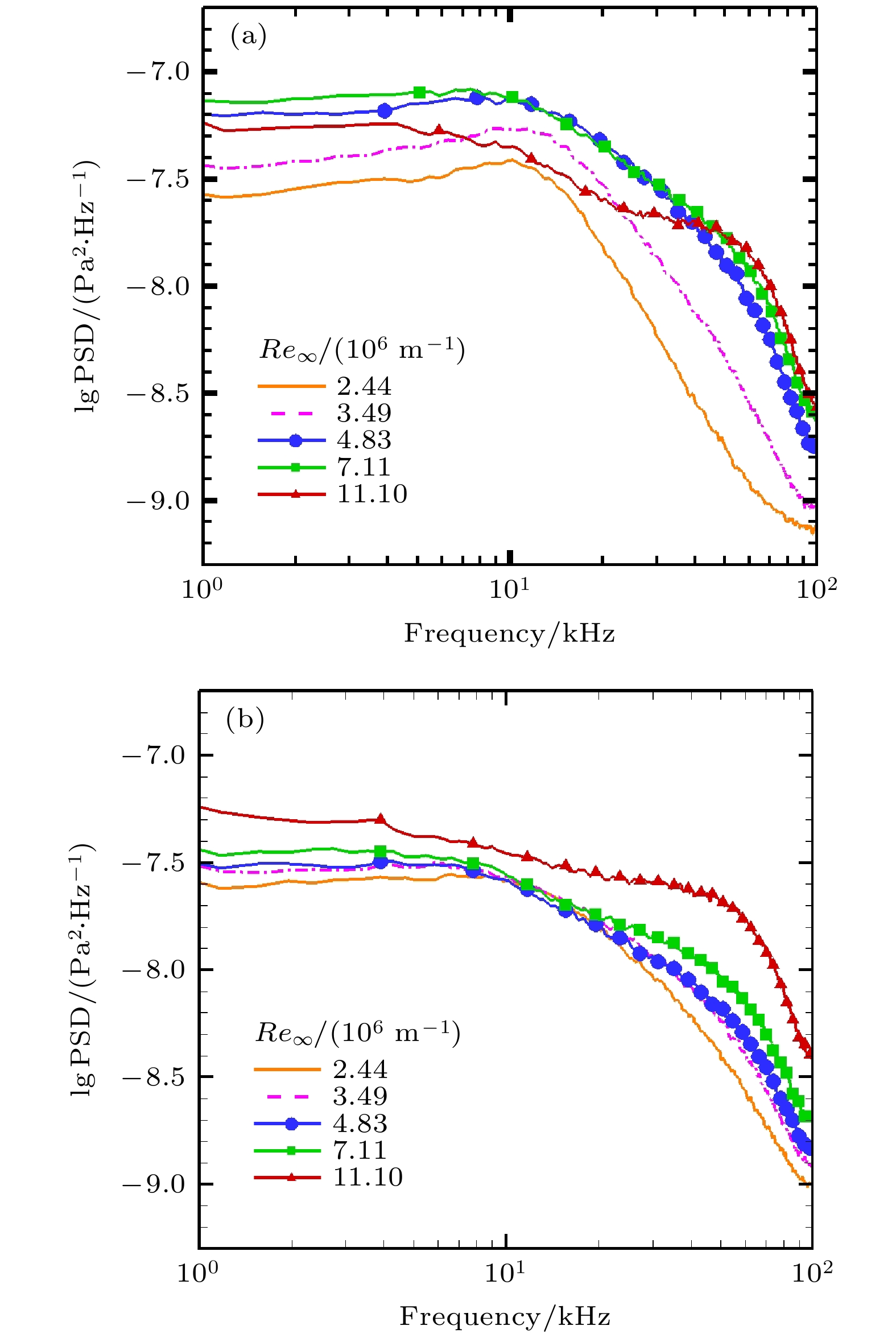 图 11 10°攻角三角翼迎风面的PSD结果 (a) K2; (b) K3
图 11 10°攻角三角翼迎风面的PSD结果 (a) K2; (b) K3Figure11. PSD results on the windward side of the delta wing at α = 10°: (a) K2; (b) K3.
将K2测点处的PSD曲线在10 kHz处的PSD幅值提取出来, 表示在图12中. 由图12可知, 10 kHz扰动波信号的幅值先增大后减小, 说明了非定常横流波沿垂直于前缘方向增长、饱和、衰减的发展过程. 将5°和10°攻角测到的扰动波幅值变化进行比较. 当攻角为10°时, 10 kHz的扰动波在单位雷诺数Re = 4.7 × 106 m–1附近幅值达到饱和, 并在单位雷诺数7.1 × 106 m–1附近开始衰减. 而攻角为5°时, 扰动波在7.1 × 106 m–1时开始饱和, 经历了较长的饱和阶段, 一直到Re = 11.1 × 106 m–1附近开始衰减. 因此, 模型攻角由5°增加到10°时, 非定常横流波更快增长到饱和, 并且饱和阶段缩短, 在更小的雷诺数下幅值就会发生衰减. 此外, 还可以观察到在5°和10°两个攻角状态下, 扰动波达到饱和的幅值相差不多, 都在10–7.15 Pa2·Hz–1左右.
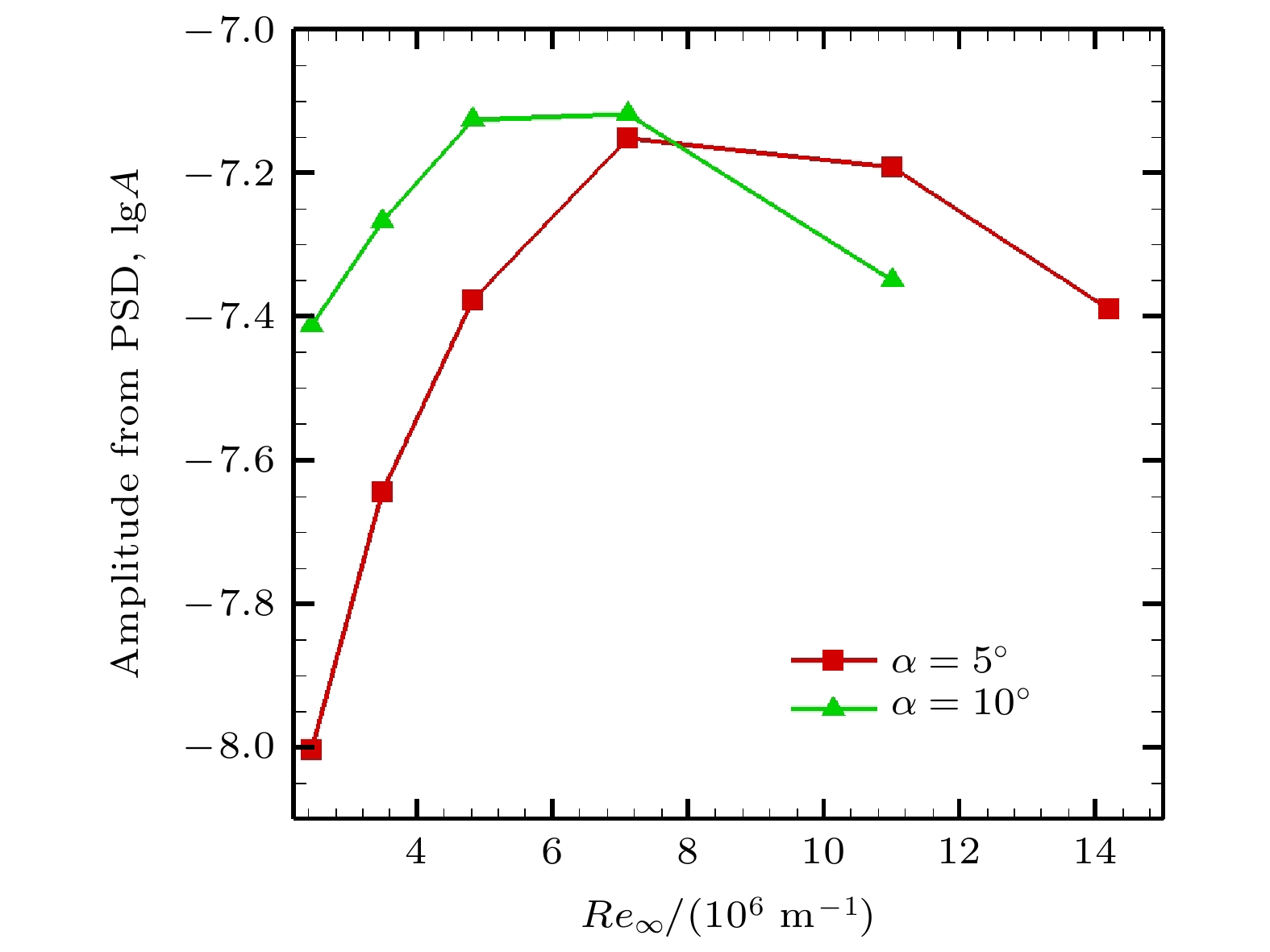 图 12 K2位置处10 kHz扰动波幅值随雷诺数的变化
图 12 K2位置处10 kHz扰动波幅值随雷诺数的变化Figure12. Growth of the amplitude at frequency of 10 kHz at K2.
2
3.5.非定常横流波特性研究
我们使用了Kulite传感组成的传感器阵列来测量非定常横流波的传播方向以及相速度. 测量方法及原理参考了Poggie等[31]的论文. 使用三个传感器组成两个传感器对, 通过互相关算法可以得到扰动波在两个传感器上的时间延时. 结合三个传感器的坐标, 便可以得到行进波的传播方向和相速度. 具体过程如下.图13是三角翼坐标系以及行波传播方向的坐标系. 图13中3个蓝点是传感器的位置, ξ, η是传感器x, y坐标位置, η'为平行于波阵面方向, ξ'为波阵面传播方向. 则波的传播角Ψ和相速度cr可以由(1)式和(2)式得到.
 图 13 波阵面以及坐标系
图 13 波阵面以及坐标系Figure13. Schematic diagram of the wave front and coordinate system.
将传感器对K7, K8, K9作为例子来说明非定常横流波的计算过程. 5°攻角迎风面上, K7, K8, K9传感器的PSD结果如图14所示. 在3个较低的雷诺数时, 能够观察到10 kHz附近的明显的非定常横流波信号, 频带宽度约为0—20 kHz.
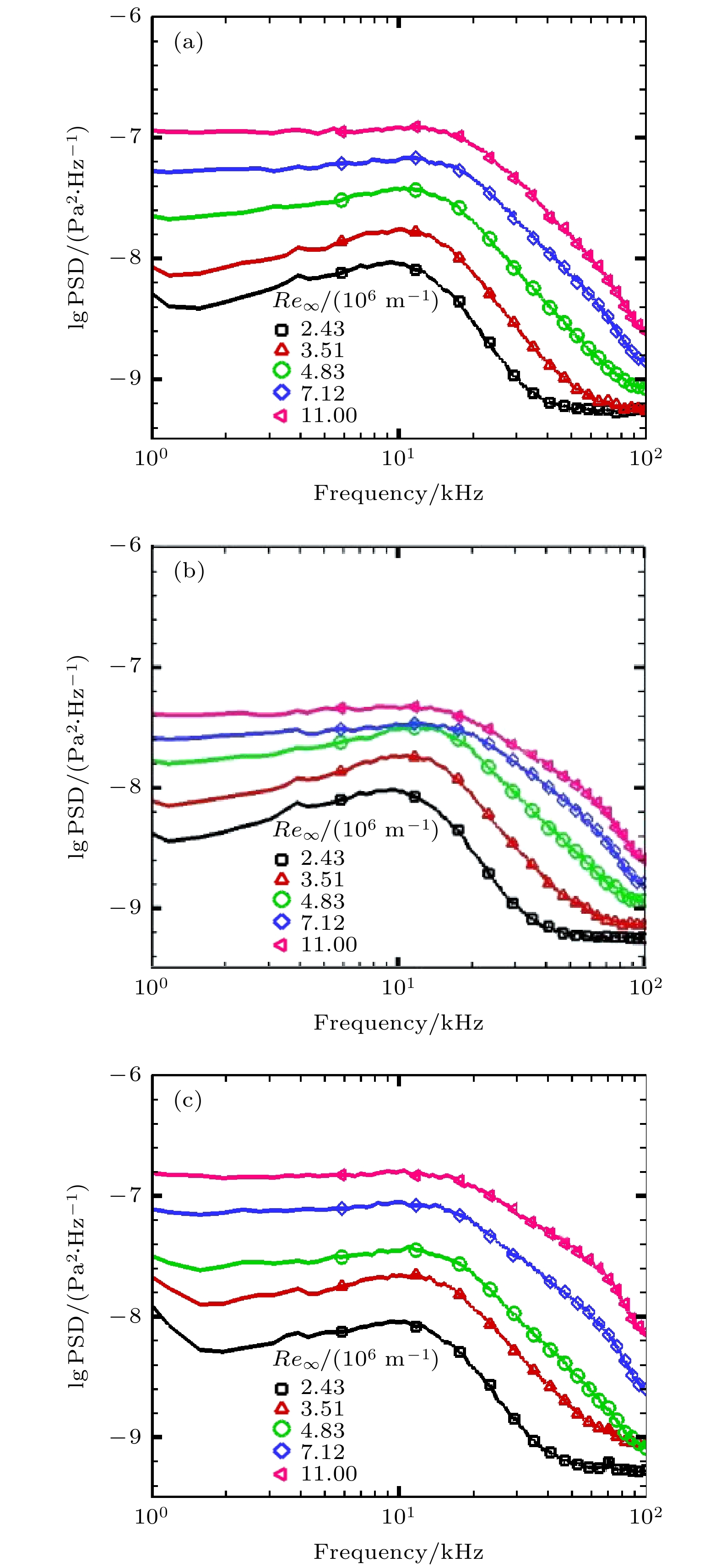 图 14 K7—K9传感器所测5°攻角迎风面PSD结果 (a) K7; (b) K8; (c) K9
图 14 K7—K9传感器所测5°攻角迎风面PSD结果 (a) K7; (b) K8; (c) K9Figure14. PSD results from sensors K7—K9 at α = 5°: (a) K7; (b) K8; (c) K9.
选取Re = 2.43 × 106 m–1作为典型状态. K7, K8, K9三个传感器组成K7-8, K7-9和K8-9三个传感器对. 根据刘小林等[18]论文中的方法, 计算得到0—20 kHz的脉动压力信号在三个传感器对之间的延迟时间τ和相关系数γ2, 将结果表示在图15中. 由图15(a)可知, 延迟时间τ的符号有正有负, 当τ为正时, 例如τ_78, 则传感器信号先传播到K8, 之后经过时间τ_78后再传播到K7. 由15(b)可知, 在0—20 kHz之间, 三个传感器对的相关系数都大于0.5, 相关系数较高, 因此对延迟时间的计算有较高的可信度.
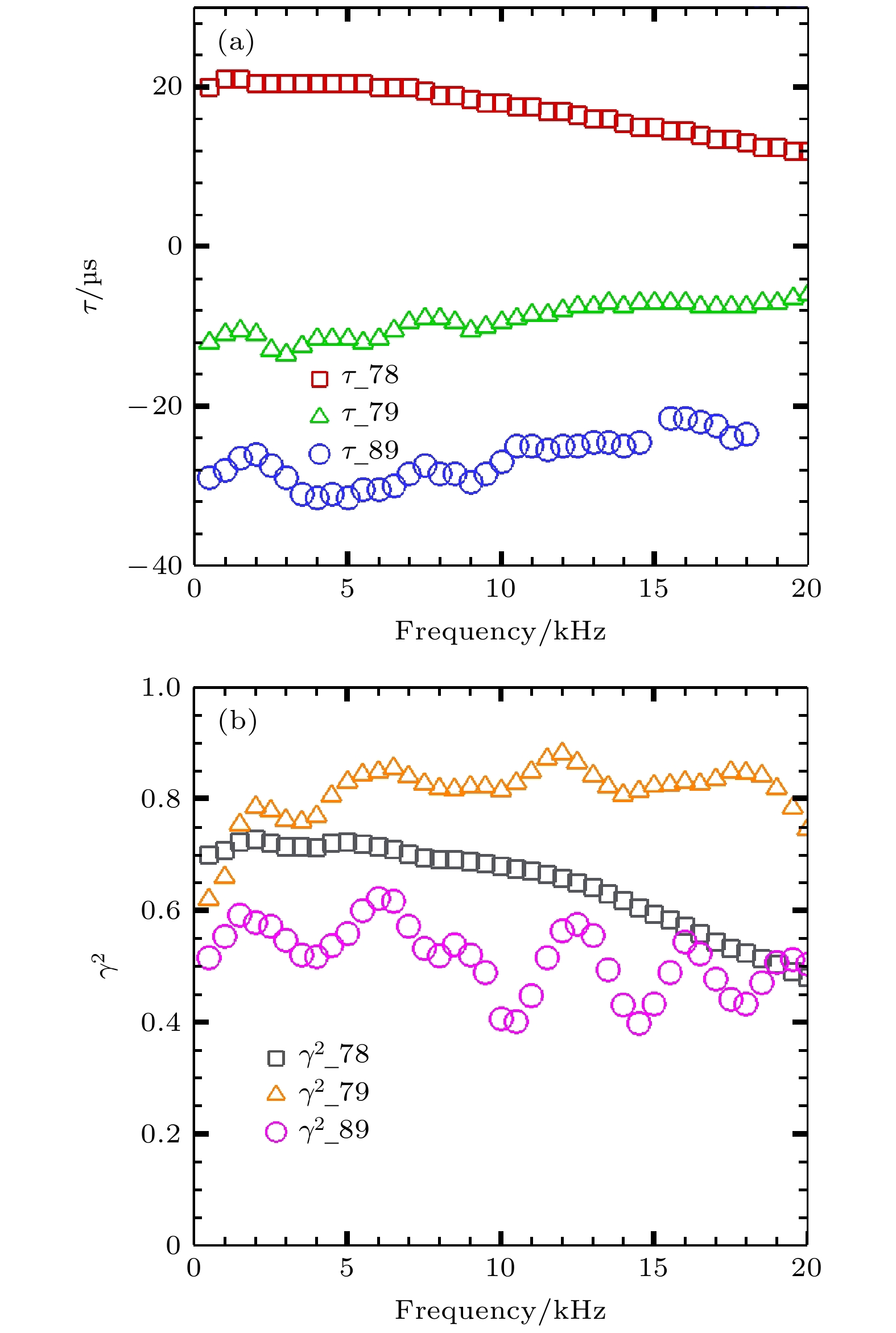 图 15 三个传感器对所测信号的延迟时间τ和相关系数γ2
图 15 三个传感器对所测信号的延迟时间τ和相关系数γ2Figure15. Delay time τ and correlation coefficients γ2 of signal at three sensor pairs.
将τ_78和τ_79代入到(1)式和(2)式, K7处的传播角Ψ和相速度cr. 将相速度cr使用自由流速度U∞ = 866 m/s进行无量纲化, 将结果表示在图16中. 左侧的y坐标表示无量纲相速度, 右侧的坐标表示非定常横流波的传播角度. 由图16可知, 在0—20 kHz频率范围内, 相速度在主流速度的0.2—0.4倍之间, 波的传播角度在75°—90°之间. 根据前3节的分析, 10 kHz左右为非定常横流波的特征频率, 因此10 kHz时扰动波的传播角和相速度是此状态下非定常横流行波的特性, 即Ψ = 85.78°, cr/U∞ = 0.26.
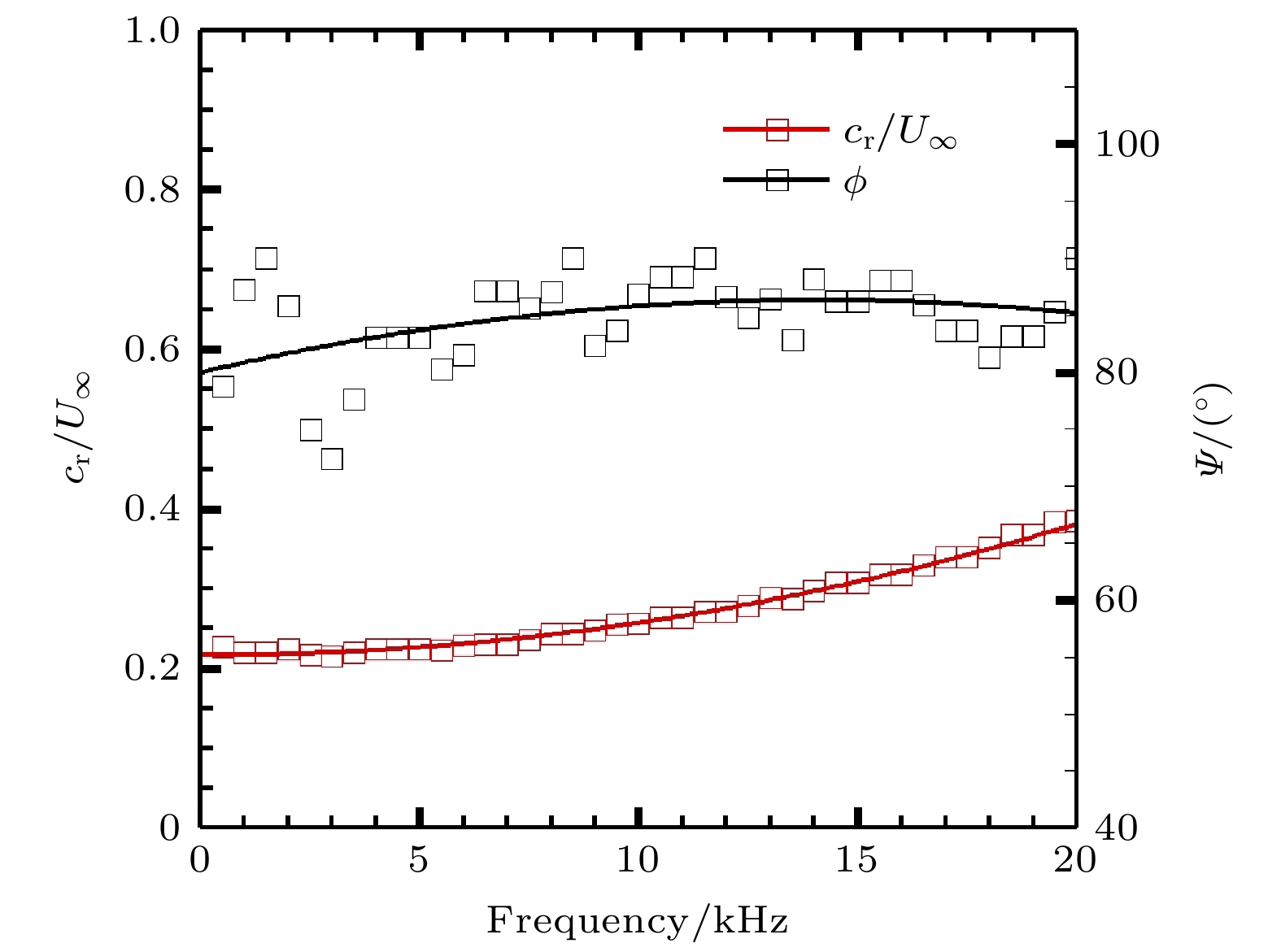 图 16 非定常横流波的相速度和传播角度(α = 5°, Re∞ = 2.43 × 106 m–1)
图 16 非定常横流波的相速度和传播角度(α = 5°, Re∞ = 2.43 × 106 m–1)Figure16. Phase velocity and wave angle of traveling crossflow waves (α = 5°, Re∞ = 2.43 × 106 m–1).
将K7-8-9和K3-5-6两个传感器阵列在不同雷诺数和攻角下测到的非定常横流波的无量纲相速度和传播角度表示在图17中. 图17中横轴代表单位雷诺数, 纵轴分别代表非定常横流波的无量纲相速度和波的传播度角.
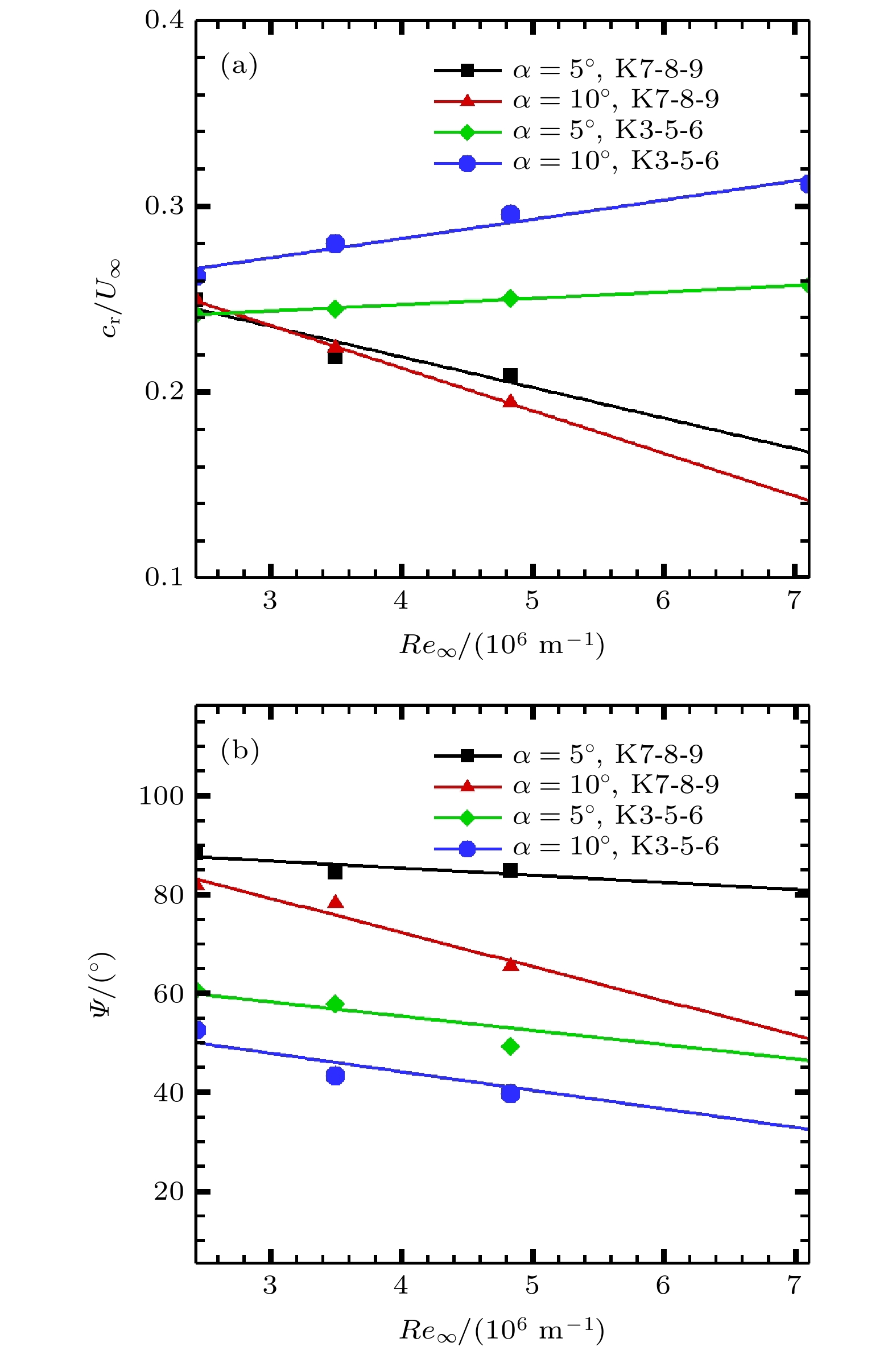 图 17 不同攻角和雷诺数下横流波的相速度和传播角度 (a) 无量纲相速度; (b) 传播角度
图 17 不同攻角和雷诺数下横流波的相速度和传播角度 (a) 无量纲相速度; (b) 传播角度Figure17. Dimensionless phase velocity and wave propagation angle of crossflow waves at different conditions: (a) Dimensionless phase velocity; (b) wave propagation angle.
在K7-8-9位置, 非定常横流波的相速度随着雷诺数的增加而减小, 在K3-5-6位置, 相速度随雷诺数的变化趋势与K7-8-9相反. 并且, K7-8-9传感器组测得的Ψ在80°—90°之间, 比K3-5-6位置处高很多. 产生这些差异的原因可能是K3-5-6位置处于转捩阵面与前缘平行的区域, 而K7-8-9可能还处于受头部影响的范围内. 因此, 在之后的分析中, 使用K3-5-6测得的结果来说明非定常横流波的特性.
在K3-5-6传感器阵列位置, 波的无量纲相速度在cr/U∞在0.25—0.32之间, 传播角度Ψ在40°—60°之间. 5°攻角时, 无量纲相速度为0.24—0.26, 传播角为50°—60°, 而10°攻角时无量纲相速度为0.26—0.32, 传播角为40°—55°. 相同雷诺数下, 10°攻角的传播角更小, 无量纲相速度更大. 原因可能如下: 由传播角度定义的示意图(图13), Ψ越小, 波阵面向模型中心线方向偏离的角度更大. 攻角较大时, 展向的压力梯度更大, 因此在边界层内产生更高的横流速度, 使横流波的波阵面更加偏向模型中心线, 因此, 10°攻角时非定常横流波的传播角度Ψ比5°攻角时小. 当边界层流体微团的合速度可以分解为ξ' 和η' 两个方向的速度, 横流波的传播角度Ψ越小, ξ' 方向与合速度之间的夹角也越小, 因此, 合速度在ξ' 方向的分量就会越大, 因此, 雷诺数相同时, 10°攻角时的相速度cr大于5°攻角.
三角翼上靠近前缘的转捩阵面与前缘平行, 并且转捩阵面光滑. 边界层转捩由非定常横流不稳定性主导, 特征频率约为10 kHz. 得到了横流波的精细流动结构, 形态与数值计算得到的符合较好. 随雷诺数增加, 非定常横流波频率增加, 幅值先增长至饱和而后衰减. 增大攻角, 横流波幅值增长更加迅速, 在更低雷诺数下达到饱和、衰减. 在K3-5-6传感器阵列位置, 无量纲相速度cr/U∞在0.25—0.32之间, 传播角度Ψ在40°—60°之间. 10°攻角状态下, 非定常横流波的传播角更小, 无量纲相速度更大.
