全文HTML
--> --> -->目前对在体微小血管成像及分析血流动力学变化的方法包括电子计算机断层扫描血管造影(computed tomography angiography, CTA)[8,9]、磁共振血管造影(magnetic resonance angiography, MRA)[10]和超声多普勒成像技术[11,12]. CTA[13]和MRA[14]的血管成像分辨率可达到50和100 μm, 但以上两种技术存在扫描时间长、电离辐射和设备笨重等不足, 限制了其在实时血流成像领域的应用.
超声成像具有无辐射、便携与快速的特点, 当前超声多普勒成像技术已被广泛应用于人体血流成像以及包括血管内斑块与血栓等疾病的临床诊断与分析[15,16]. 近十年来, 基于平面波成像方法的超快超声多普勒成像技术得到了较快发展[17,18]. 相较于传统的波束聚焦成像方法, 平面波成像可大幅度提高成像帧频[19](由每秒几十帧提升至上万帧), 从而可用于观测血流量、流速和血管直径的瞬时微小变化并进行血流动力学分析. 顾名思义, 平面波方法所发射的是非聚焦声波; 因而, 与传统聚焦波束的成像方法相比, 单帧平面波成像存在信噪比(signal to noise ratio, SNR)低、对比度差的缺点. 就此, 2009年Montald等[20]提出了多角度平面波相干合成的方法, 实验结果表明该方法能够在保证高成像帧频的同时, 提高成像结果的SNR、对比度和分辨率. 2011年, Mace等[21]提出基于平面波发射的超声功能成像方法, 分别在刺激胡须和癫痫发作情况下对大鼠脑血流进行了高时空分辨率成像, 依据血流变化动态监测结果识别相关脑功能活动区. 2013年, Mace等[22]深入介绍了超快超声成像方法, 并与传统多普勒成像方法相对比, 通过大鼠脑的在体实验证明了该方法能有效提高微小血管血流变化的监测灵敏度. 2017年, Demene等[23]将超快超声多普勒成像技术应用于新生儿的脑血流成像, 在新生儿睡眠状态下观察了活跃态和安静态脑区的血流变化, 为脑功能超声成像技术的应用与发展开拓了前景.
相较于脑血流成像, 脊椎复杂的骨结构特征和呼吸运动的干扰给脊髓内微血流超声成像带来挑战[24], 2018年, Khaing等[7]应用超声微泡造影剂对椎板打开条件下的大鼠脊髓血流进行了对比度增强超声成像(contrast-enhanced ultrasound, CEUS), 成功观察到了脊髓中的微血管结构. 近期研究表明, 超快超声可在无造影剂条件下实现脑微血管成像[23], 但该技术在脊髓内的微血流成像仍待深入. 另外, 相关多角度成像方法、杂波滤除技术以及多普勒频偏分析等研究仍待探讨.
本文提出了一种无需注射超声造影剂的超快超声多普勒成像方法, 该方法基于超快超声平面波发射与接收序列, 利用基于爆炸反射器模型(exploding reflector model, ERM)的频率-波数域迁移(fk-migration)算法进行图像重建; 并利用基于特征值分解(eigenvalue decomposition, EVD)的频率-幅值双阈值滤波法进行动态血流信号与静态组织信号的分离, 最终实现了动态血流的功率多普勒成像. 本文进行了仿体实验和大鼠脊髓在体实验, 平面波成像帧频大于万帧每秒, 获得了脊髓内微血流的高时空分辨率的成像结果, 并探讨了超快多普勒血流成像中复合平面波角度数对成像质量的影响.
 图 1 方法流程示意
图 1 方法流程示意Figure1. Flow chart of the proposed method.
2
2.1.超快超声成像
文中所用超快超声成像序列如图2所示. 该成像序列由若干个子序列构成, 每个子序列发射一组N角度的倾斜平面波并接收反射回波, 不断重复子序列从而进行连续成像. 为避免连续两次接收到的回波信号发生混叠, 脉冲发射时间间隔要大于超声波在成像区域往返一次所需的最长时间, 该时间所对应的最高极限帧频K, 其计算公式如下: 图 2 超快超声成像序列示意图
图 2 超快超声成像序列示意图Figure2. Schematic diagram of ultrafast ultrasound imaging sequence.

2
2.2.基于ERM模型的波束合成方法
2013年, Damien等[25]将Stolt提出的fk-migration算法应用于平面波成像, 并结合ERM模型进行波束合成, 从而实现图像重建. 相较于传统的延时叠加算法, fk-migration算法能够提高成像质量和计算效率, 计算过程中应用快速傅里叶变换算法可在保持图像高SNR和横向分辨率的前提下进一步提高计算速度[25].3
2.2.1.ERM模型
超声波在传播过程中遇到一系列散射子会发生散射, 反向散射回波会被超声换能器阵列接收. 超声波发射与回波接收模型如图3(a)所示,



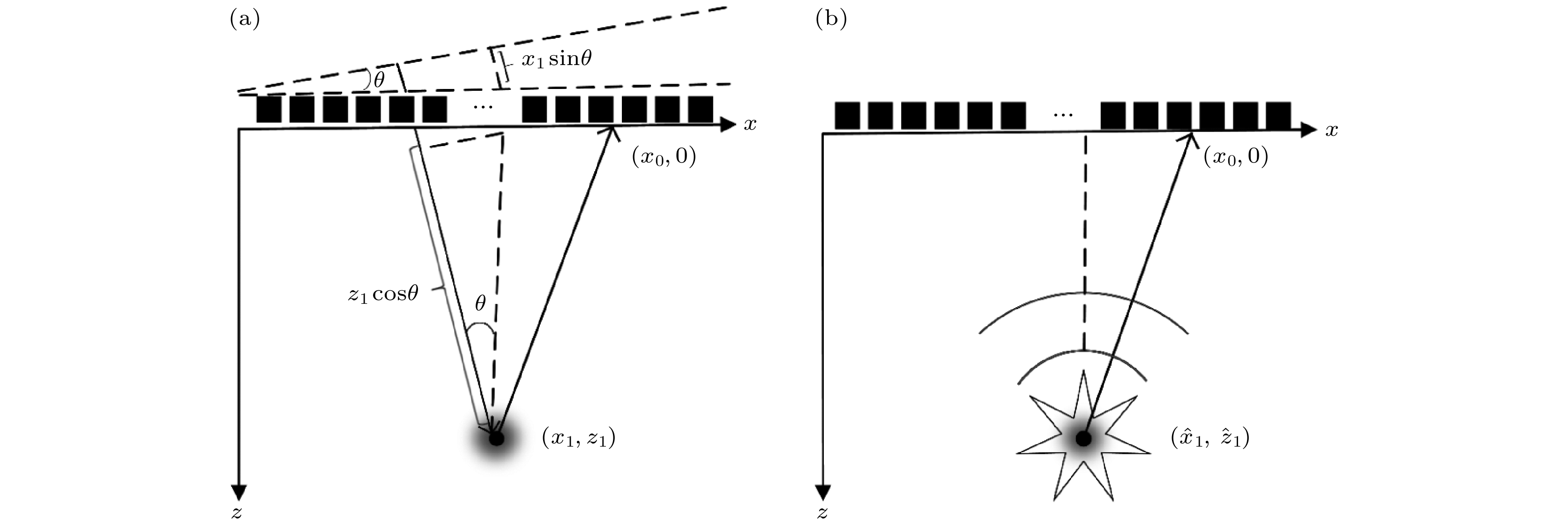 图 3 超声波传播模型 (a) 超声波发射与回波接收模型; (b) ERM模型
图 3 超声波传播模型 (a) 超声波发射与回波接收模型; (b) ERM模型Figure3. Ultrasonic propagation model: (a) Ultrasonic transmitting and echo receiving model; (b) exploding reflector model (ERM).

另外, 建立一个ERM模型, 如图3(b)所示, 该模型中假设(




为使ERM模型与上述超声波发射与回波接收模型等效, 令(4)式计算所得时长与(3)式及其一、二阶导数式相等, 通过解方程组可得如下参数变换[25]:
3
2.2.2.频率-波数域波束合成
首先, 对波动方程进行傅里叶变换可得亥姆霍兹方程[25]




由Stolt所提出的fk-migration算法中, 频域映射方式为[25]


2
2.3.基于EVD的频率-幅值双阈值滤波法
超声探头接收到的全部回波信号由组织、血流回波信号和噪声信号组成. 应用基于EVD的频率-幅值双阈值滤波法[27]进行血流信号的提取时, 首先对多帧图像进行特征值分解, 计算公式为[28]











2
2.4.功率多普勒成像
当超声波通过血管时, 一部分能量被红细胞散射并由超声换能器阵列接收反向散射回波. 多普勒超声成像通过重复发射超声脉冲来监测血流中红细胞的运动从而得到血流变化的信息. 功率多普勒模式下平均强度的计算公式为[22]仿体采用长6 cm、宽5 cm、高5 cm的琼脂块, 在6—8 mm深处制备直径为2 mm的管路以模拟血管. 用注射泵以0.1 mL/s的速度将混有散射子的悬浊液注入中管道中模拟血流. 仿体测量中采用每秒3500次的超快超声脉冲发射序列, 该序列由500个子序列构成, 各子序列由–10°—10°之间等间隔分布的7个倾斜平面波组成, 复合成像帧频为每秒500帧. 成像区域为15.0 mm × 12.7 mm的矩形成像区域.
在体实验对象为Sprague-Dawley大鼠(雄性, 7周龄, 体重约350 g). 通过手术将T13-L2段椎弓板和棘突切除, 克服超声经过椎骨所致能量衰减. 用异氟烷麻醉大鼠(5%用于诱导麻醉, 2.5%—3.0%用于术中维持麻醉). 随后, 制作刺入型脊髓损伤模型. 实验结束时, 大鼠脱位处死. 实验中采用每秒14040次的超快超声平面波发射序列, 该序列由520个子序列构成, 每个子序列发射–10°—10°之间等间隔分布的27个倾斜角度平面波, 因此, 复合成像帧频为每秒520帧. 实际成像区域为14.0 mm × 12.7 mm的矩形成像区域(实验设定的成像深度为5.9 mm, 实际成像深度是设定成像区域的对角线长度). 实验装置示意如图4所示.
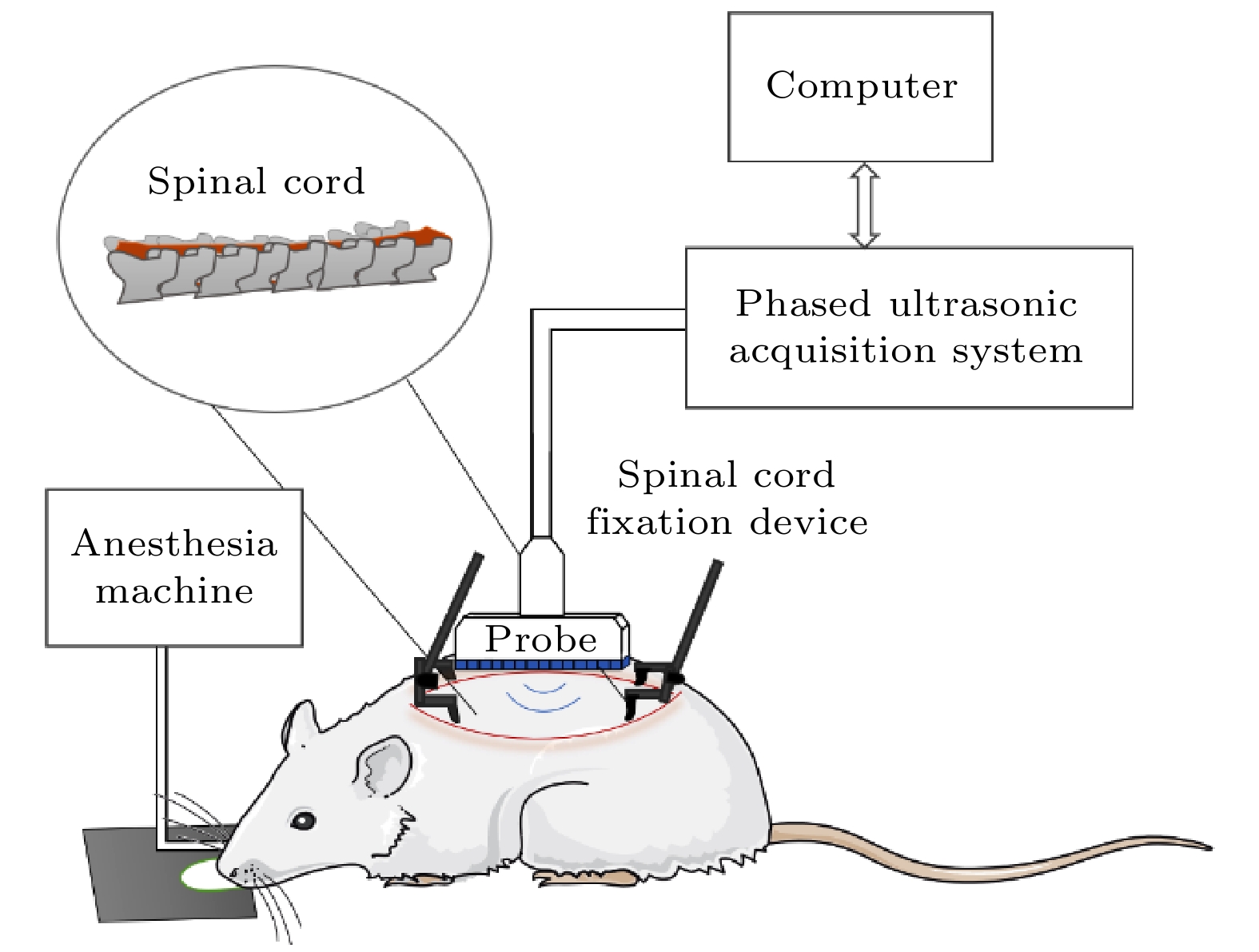 图 4 大鼠脊髓血流超声成像实验装置示意
图 4 大鼠脊髓血流超声成像实验装置示意Figure4. Schematic diagram of experimental ultrasonic imaging set-up for blood flow of rat spinal cord.
4.1.仿体实验结果
对1 s内获得的回波数据进行波束合成与多角度平面波相干叠加, 共得到500帧复合B模式图像. 为提取仿体血流信号, 对500帧图像数据进行EVD处理和特征向量的多普勒频移分析. 特征值阈值选取会影响超快超声功率多谱勒成像结果的对比度和SNR, 相关选取标准仍有赖于经验性参数[28]. 通常, 动态血流信号对应多普勒频移高且特征值小的信号成分, 静态组织信号对应多普勒频移低且特征值大的信号成分. 图5(a)为归一化多普勒频移对应的特征向量个数的直方图, 纵坐标为特征向量个数. 由图可得, 低频分量集中分布在归一化多普勒频移小于0.1的区间, 因此将截止频率设为0.1以滤除低频组织信号. 在体实验中也采用了该阈值参数. 图5(b)为数据集的特征向量与特征值的对应关系, 图5(c)为特征向量与归一化多普勒频移的对应关系, 图5(d)为特征值与归一化多普勒频移的对应关系, 图中虚线为归一化多普勒频移为0.1的阈值线, 实线为幅值为–80 dB的阈值线. 将多普勒频移小于0.1且特征值大于–80 dB的特征向量滤除, 重建后的成像结果(第400帧)如图6所示. 图6(a)—(d)分别是滤波前的仿体成像结果、滤波后的仿体血流图、滤波后的仿体软组织图和仿体血流的功率多普勒成像结果. 如图6(d)所示, 通过上述杂波滤除方法可以得到6—8 mm深度处仿体血流的功率多普勒成像结果.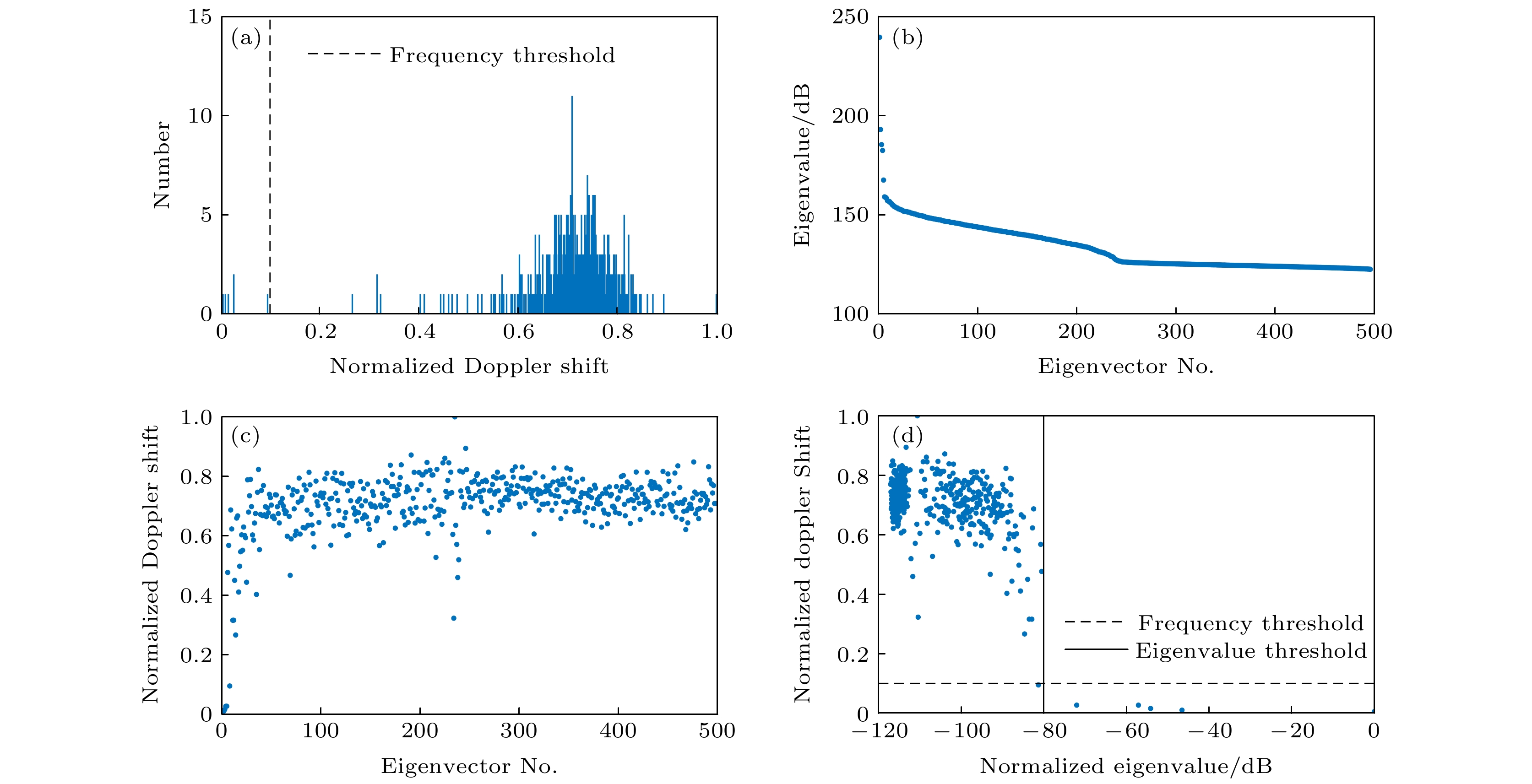 图 5 特征值分解与多普勒频移分析结果 (a) 归一化多普勒频移对应特征向量个数的直方图; (b)特征向量的特征值; (c) 特征向量的归一化多普勒频移; (d) 特征值对应的归一化多普勒频移
图 5 特征值分解与多普勒频移分析结果 (a) 归一化多普勒频移对应特征向量个数的直方图; (b)特征向量的特征值; (c) 特征向量的归一化多普勒频移; (d) 特征值对应的归一化多普勒频移Figure5. Eigenvalue decomposition and Doppler shift analysis results: (a) Histogram of the number of eigenvectors corresponding to normalized Doppler shifts; (b) eigenvalues of eigenvectors; (c) normalized Doppler shifts of eigenvectors; (d) eigenvalues versus normalized Doppler shifts.
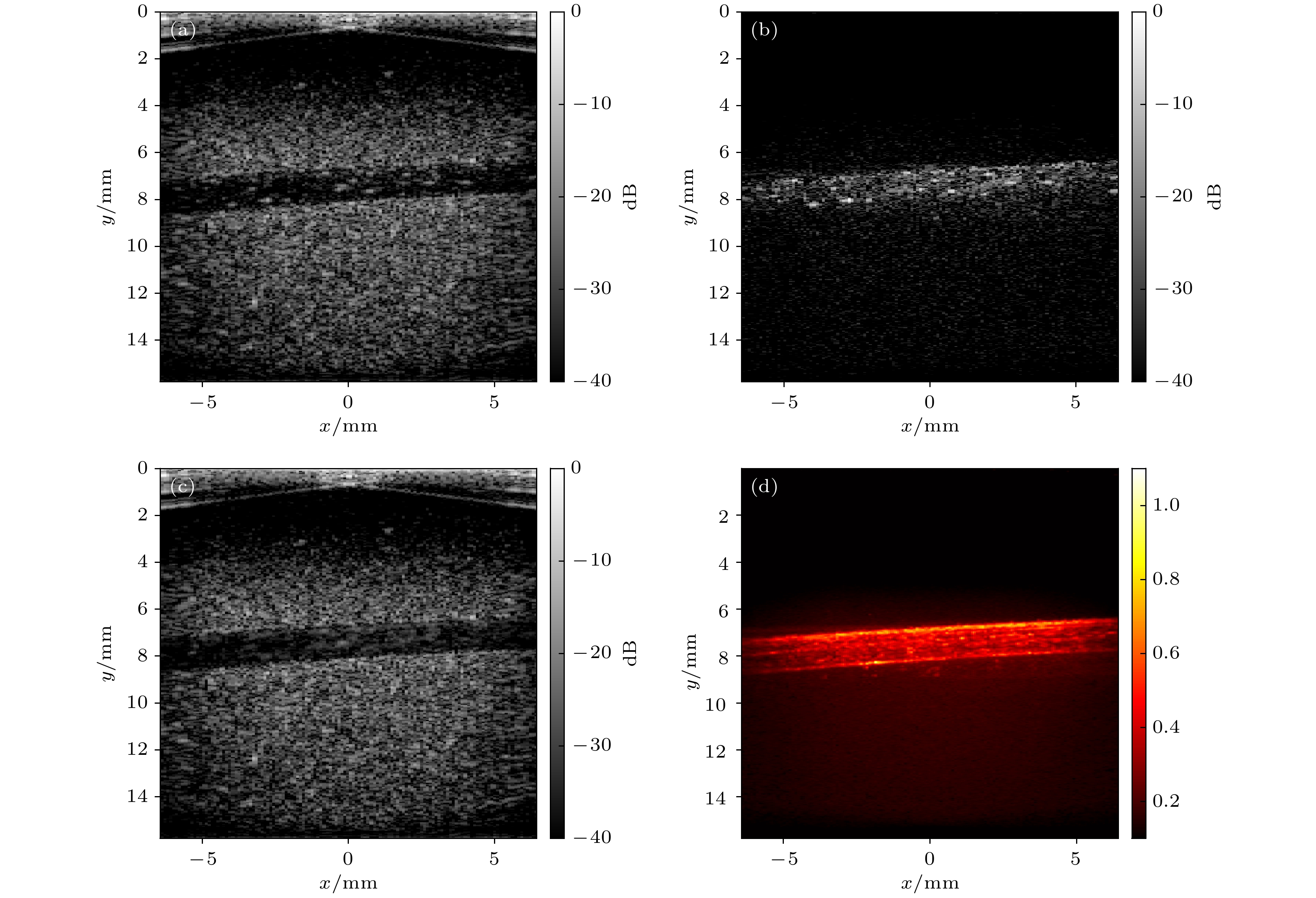 图 6 仿体血流成像结果(第400帧) (a) 滤波前的成像结果; (b) 滤波后的血流成像结果; (c) 滤波后的软组织成像结果; (d) 功率多普勒成像结果
图 6 仿体血流成像结果(第400帧) (a) 滤波前的成像结果; (b) 滤波后的血流成像结果; (c) 滤波后的软组织成像结果; (d) 功率多普勒成像结果Figure6. Imaging results of the 400th frame of the phantom blood flow: (a) Original image before clutter filtering; (b) blood flow image after clutter filtering; (c) soft tissue image after clutter filtering; (d) power Doppler imaging result.
2
4.2.大鼠在体实验结果
对1 s内得到的回波数据进行波束合成与多角度平面波相干叠加, 共得到520帧复合B模式图像. 对520帧图像数据进行EVD处理和特征向量的多普勒频移分析, 结果如图7所示. 图7(a)为归一化多普勒频移对应特征向量个数的直方图, 纵坐标为特征向量的个数, 相较于仿体血流, 实际血流有不同的流速, 因此其多普勒频移的分布区间更宽. 若频率阈值选取过高, 会损失低速血流信号成分, 导致有效信息缺失; 本实验采用与仿体实验一致的经验频率阈值, 即取归一化多普勒频移为0.1. 图7(b)为数据集的特征向量与特征值的对应关系, 图7(c)为特征向量与归一化多普勒频移的对应关系, 图7(d)为特征值与归一化多普勒频移的对应关系, 图中虚线为归一化多普勒频移为0.1的阈值线, 实线为幅值为–130 dB的阈值线. 将多普勒频移小于0.1且特征值幅值大于–130 dB的特征向量滤除. 图8为多角度平面复合和滤波前后的成像结果. 图8(a), (b)分别为发射单角度倾斜平面波得到的波束合成后的结果和发射27个倾斜角度平面波相干复合成像的结果, 图8(c)为滤波后的多帧脊髓血流图像, 从中可见微血流的变化情况.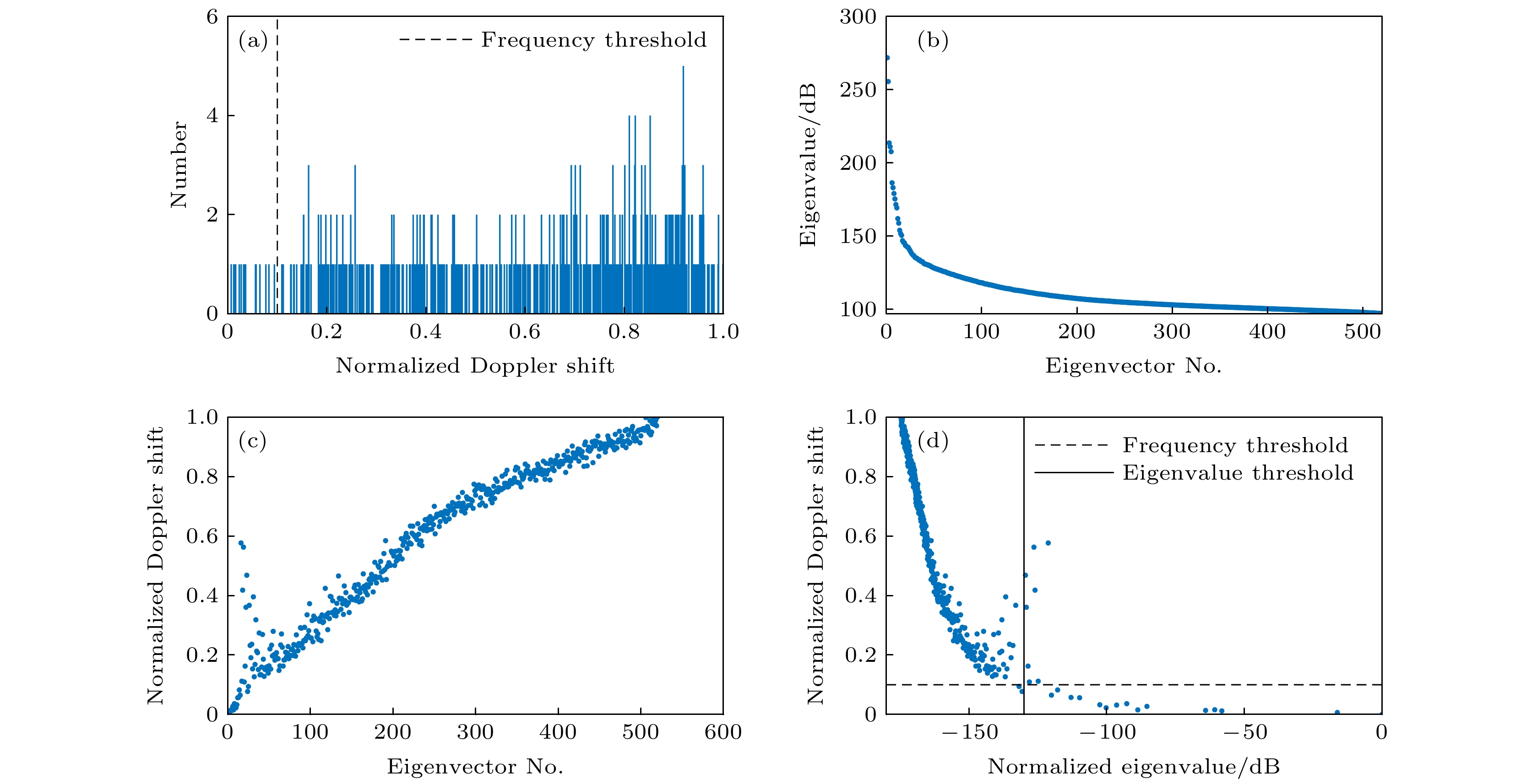 图 7 特征值分解与多普勒频移分析结果 (a) 归一化多普勒频移对应特征向量个数的直方图; (b)特征向量的特征值; (c) 特征向量的归一化多普勒频移; (d) 特征值对应的归一化多普勒频移
图 7 特征值分解与多普勒频移分析结果 (a) 归一化多普勒频移对应特征向量个数的直方图; (b)特征向量的特征值; (c) 特征向量的归一化多普勒频移; (d) 特征值对应的归一化多普勒频移Figure7. Eigenvalue decomposition and Doppler shift analysis results: (a) Histogram of the number of eigenvectors corresponding to normalized Doppler shifts; (b) eigenvalues of eigenvectors; (c) normalized Doppler shifts of eigenvectors; (d) eigenvalues versus normalized Doppler shifts.
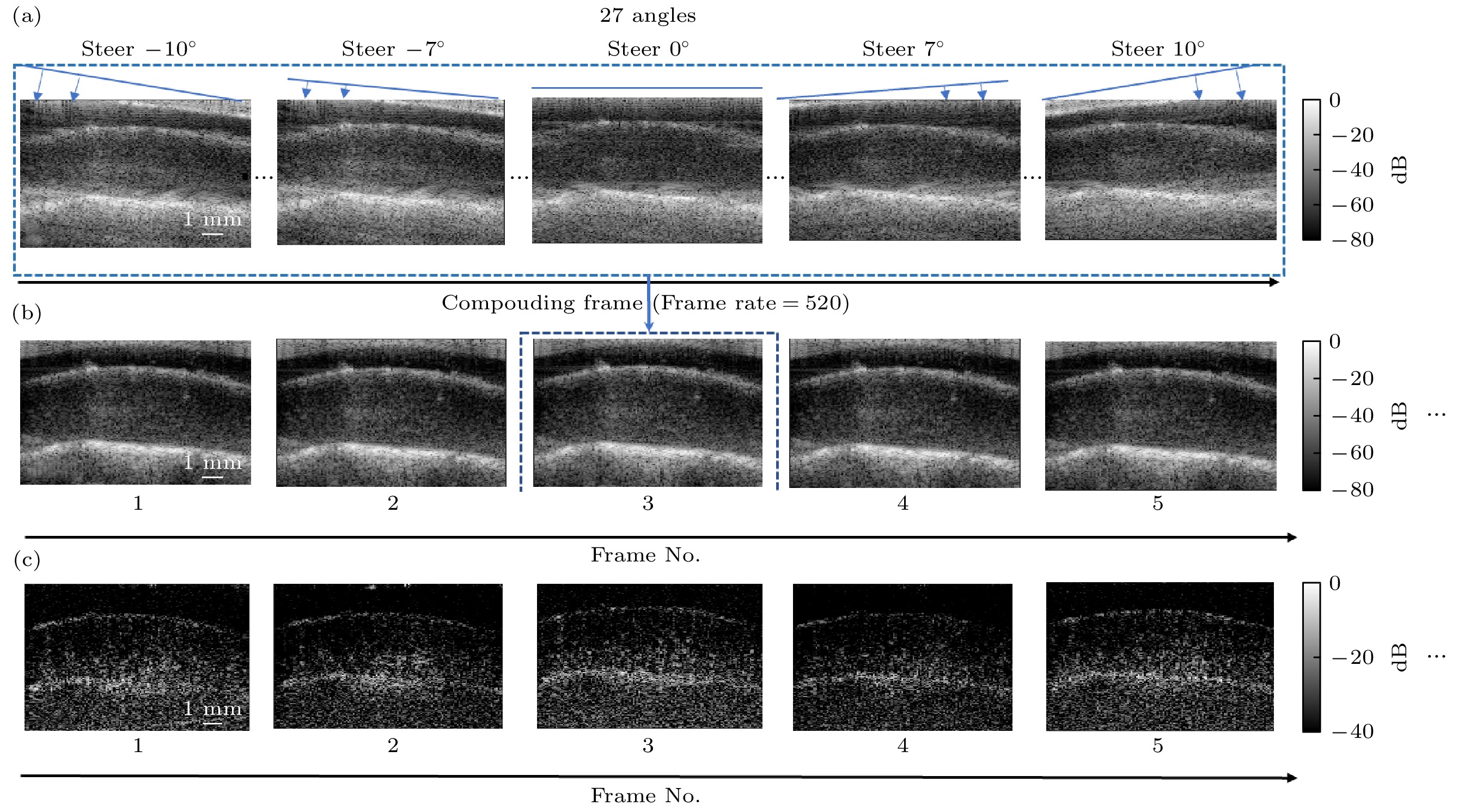 图 8 基于多角度平面波复合成像的大鼠脊髓血流成像结果 (a) 单角度平面波发射成像; (b) 多角度平面波复合成像; (c) 杂波滤除结果. 每一次发射超声平面波的时间间隔为71.225 μs, 27次发射倾斜平面波与接收反射回波的总时长为1.923 ms, 对多角度信号经相干复合可获得单帧超声图像, 其所对应的成像帧率为每秒520帧
图 8 基于多角度平面波复合成像的大鼠脊髓血流成像结果 (a) 单角度平面波发射成像; (b) 多角度平面波复合成像; (c) 杂波滤除结果. 每一次发射超声平面波的时间间隔为71.225 μs, 27次发射倾斜平面波与接收反射回波的总时长为1.923 ms, 对多角度信号经相干复合可获得单帧超声图像, 其所对应的成像帧率为每秒520帧Figure8. Blood flow imaging results of rat spinal cord based on multi-angle compounding method: (a) Beamforming results after a single emission; (b) multi-angle compounding images; (c) images after clutter filtering. The time interval between each emission is 71.225 μs. Each compounded frame is obtained using 27 steering-angle plane-waves within a period of 1.923 ms. Consequently the frame rate is 520 frames per second.
为讨论复合平面波成像中倾斜平面波角度数在超快超声多普勒血流成像中的作用, 分别设定每个子序列中发射倾斜平面波的个数为N = 3 [–1°—1°], N = 9 [–3°—3°], N = 17 [–7°—7°], N = 27 [–10°—10°](倾斜平面波的角度在设定区间内均匀分布), 复合成像帧频均为520帧/s, 成像结果如图9所示. 图9(a)—9(d)的1—3图分别为上述4种情况滤波之前、滤波之后和功率多普勒成像结果. 当N = 3 [–1°—1°]时, 成像质量差, 无法辨别脊髓内部微血管分布(如图9(a)). 当N = 9 [–3°—3°]时, 多普勒成像方法能够对脊髓内部微血管结构进行成像, 但难以呈现完整的微血管结构(如图9(b)). 随着成像角度数的增大, 当成像角度N = 17 [–7°—7°]和N = 27[–10°—10°]时, 在多普勒成像结果中可以看到较为清晰的微血管结构(如图9(c),(d)), 其中微血管分布主要由靠近背侧和靠近腹腔的两部分血供构成, 该成像结果与组织病理学中脊髓血管的解剖结构形态相似[29]. 随着角度数的增大, 图像的对比度和SNR得到改善. 并能观察到水平方向–2.5 mm, 竖直方向1.5—2.0 mm处由细针刺入脊髓所致的局部微血流缺失现象.
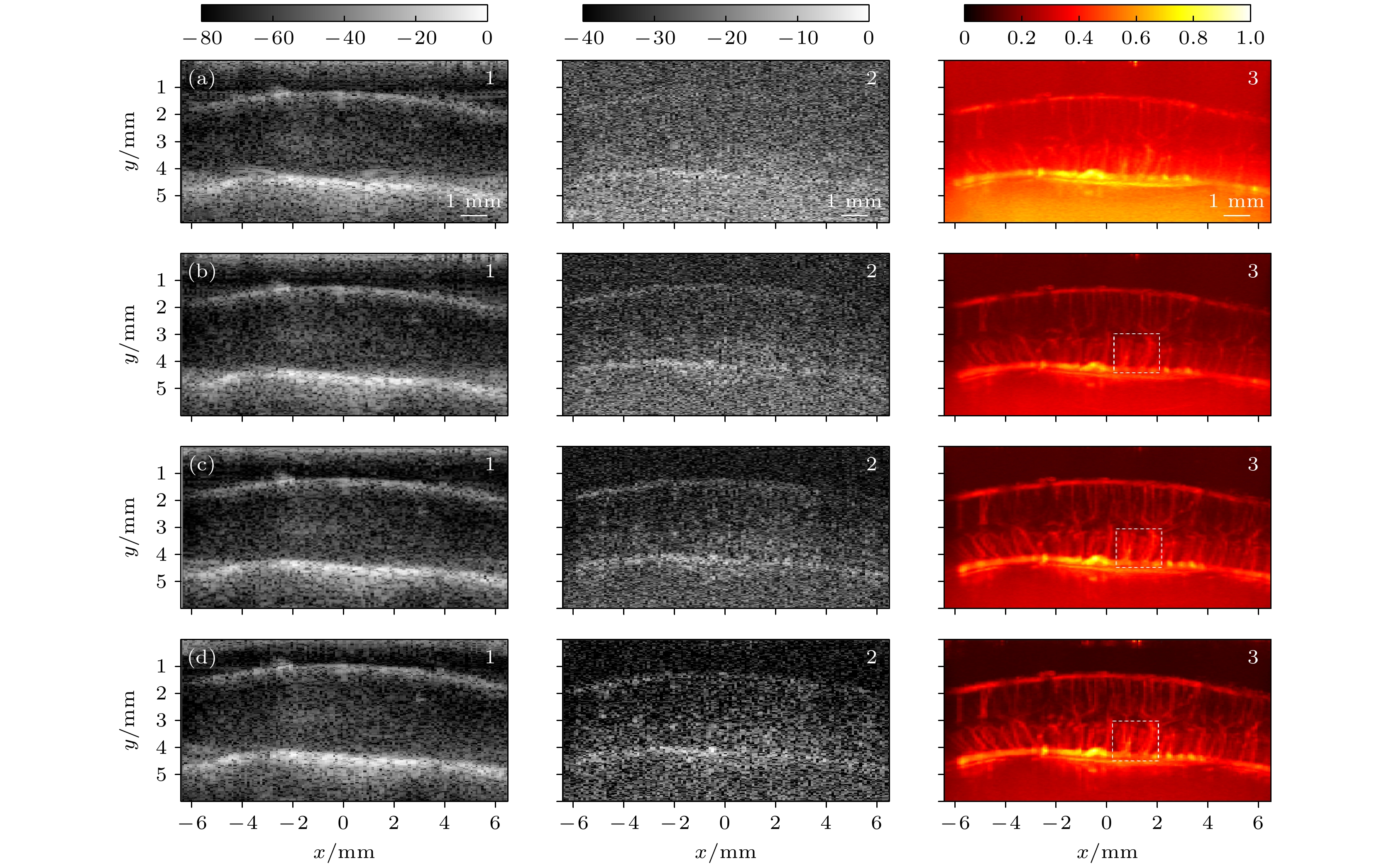 图 9 不同角度复合平面波成像结果对比图(复合帧频均为每秒520帧) (a) 3个角度[–1°—1°]倾斜平面波复合成像结果; (b) 9个角度[–3°—3°]倾斜平面波复合成像结果; (c) 17个角度[–7°—7°]倾斜平面波复合成像结果; (d) 27个角度[–10°—10°]倾斜平面波复合成像结果. 1为单帧原始B模式图像, 2为杂波滤除之后的成像结果, 其中可见微血流变化, 3为1 s内采集数据得到的功率多普勒血流图(1, 2色标单位为dB, 3为归一化数值的多普勒成像结果)
图 9 不同角度复合平面波成像结果对比图(复合帧频均为每秒520帧) (a) 3个角度[–1°—1°]倾斜平面波复合成像结果; (b) 9个角度[–3°—3°]倾斜平面波复合成像结果; (c) 17个角度[–7°—7°]倾斜平面波复合成像结果; (d) 27个角度[–10°—10°]倾斜平面波复合成像结果. 1为单帧原始B模式图像, 2为杂波滤除之后的成像结果, 其中可见微血流变化, 3为1 s内采集数据得到的功率多普勒血流图(1, 2色标单位为dB, 3为归一化数值的多普勒成像结果)Figure9. Comparison of compounded images with different numbers of steering angles (composite frame rate is 520 frames per second): (a) Images compounded of data from emitting 3 [–1°—1°] steering plane-waves; (b) images compounded of data from emitting 9 [–3°—3°] steering plane-waves; (c) images compounded of data from emitting 17 [–7°—7°] steering plane-waves; (d) images compounded of data from emitting 27 [–10°—10°] steering plane-waves. Images labeled 1 are original B-mode images; images labeled 2 are imaging results after clutter filtering in which changes of blood flow can be observed; images labeled 3 are power Doppler images of micro-vessels (data was obtained within 1 s).
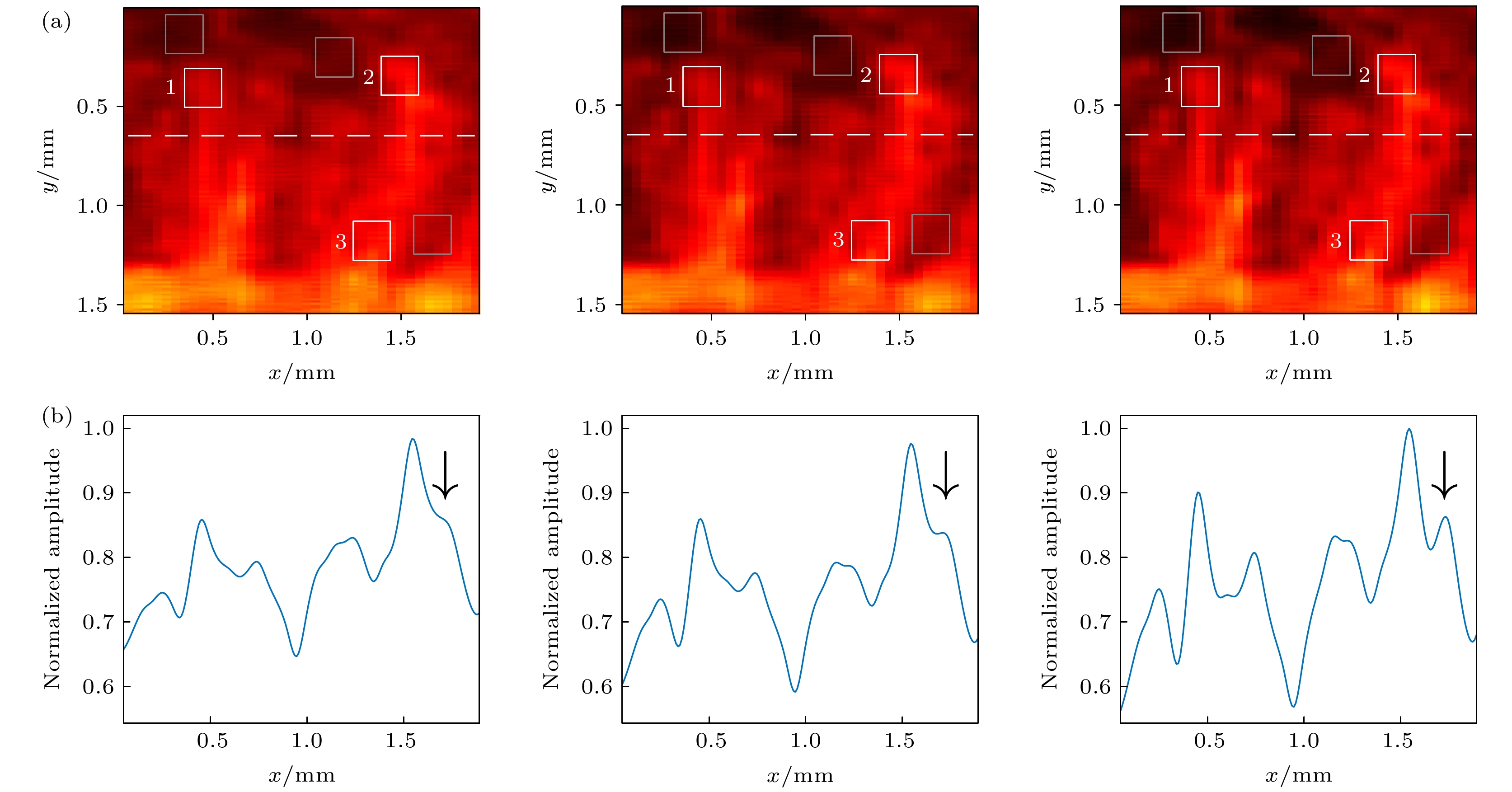 图 10 对比分辨率随复合平面波角度数增加的变化情况 (a) 当角度数N = 9, 17, 27时, 图9(b)-(d)编号3的图中矩形虚线框中图块的放大结果; (b) 当角度数N = 9, 17, 27时, 图10(a)中虚线深度处的幅值曲线图
图 10 对比分辨率随复合平面波角度数增加的变化情况 (a) 当角度数N = 9, 17, 27时, 图9(b)-(d)编号3的图中矩形虚线框中图块的放大结果; (b) 当角度数N = 9, 17, 27时, 图10(a)中虚线深度处的幅值曲线图Figure10. Change of contrast resolution with the increase of the number of steering angles: (a) Enlarged image blocks in the rectangular dashed box in No.3 figure in Fig.9 (b)-(d) (angle numbers are 9, 17, 27, respectively); (b) amplitude curve of the dotted line position in Fig.10(a) (angle numbers are 9, 17, 27, respectively).
由图10可得, 随复合平面波角度数增大, 血流信号相较于背景噪声得到增强, 以下对图像的SNR加以量化分析. 当N = 27时最大的角度范围为–10°—10°, N = 9时的角度范围约为–3°—3°. 从图10(a)中选择3个尺寸为0.2 mm × 0.2 mm的感兴趣区域(编号为1, 2, 3), 白色方框为血流信号区域, 最临近的灰色方框为参考背景区域. SNR的计算公式如下[30]:




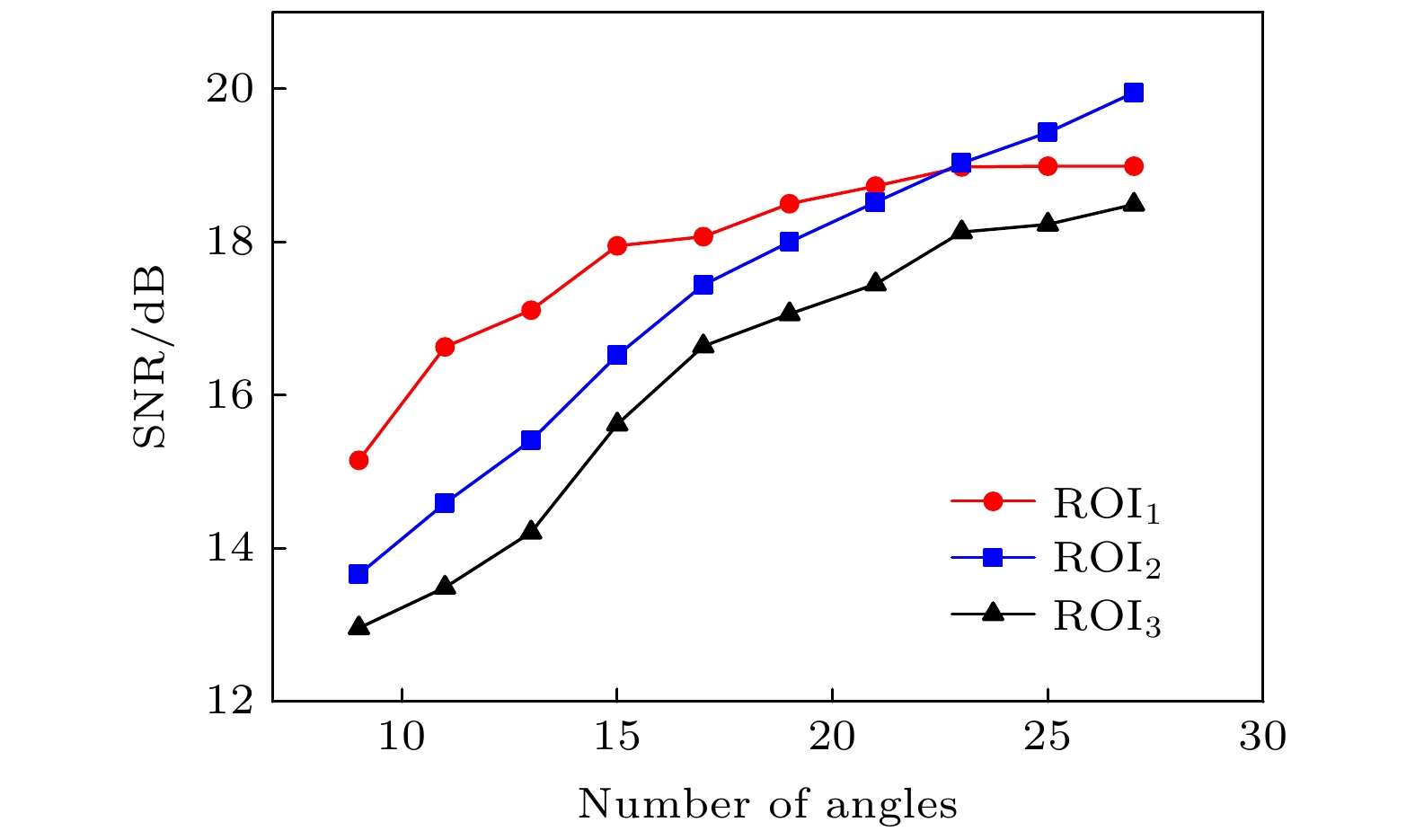 图 11 SNR随复合平面波角度数增加的变化结果
图 11 SNR随复合平面波角度数增加的变化结果Figure11. SNR versus number of steering angles.
如图11所示, 3个感兴趣区域的SNR都会随着平面波角度数的增加而增加. 对于1号感兴趣区域, 发射9个角度[–3°—3°]倾斜平面波时, SNR为15.15 dB; 发射27个角度[–10°—10°]的倾斜平面波时, SNR为18.99 dB. 类似地, 对于2号和3号感兴趣区域, 当发射9个角度[–3°—3°]倾斜平面波时, SNR较小, 分别为13.66 dB和12.96 dB; 当发射27个角度[–10°—10°]倾斜平面波时, SNR明显提高, 分别为19.95 dB和18.49 dB. 结果表明, 复合平面波角度数和角度范围的增大可显著改善多普勒成像结果的SNR.
在实际应用中, 骨衰减和相位畸变对经椎骨的超声成像影响不可忽略, 需要进行畸变校正与衰减补偿. 目前代表性的方法包括基于已知速度模型的相位畸变校正方法[31]和基于未知模型的全波反演技术[32]等, 相关技术已被用于经颅骨的脑组织超声成像. 后续研究可引入相关技术实现经椎骨的脊髓超声功能成像.
