全文HTML
--> --> -->已报道的关于CLR测距的工作主要关注的是通过发射的混沌信号(参考信号)和从目标反射回来的延迟信号的相关性来实现测距[14-20]. 在最近报道的工作中, 通过使用不同装置, 基于互相关理论的CLR测距取得了一些进展. 例如, 2014年, Zhang等[18]实验论证了一种基于微波光子混沌信号生成和光纤分布的超宽带雷达远程测距系统. 2015年, Wang等[19]利用损耗介质研究了混沌雷达系统对目标检测与测距的性能. 同年, Yao等[21]演示了一种基于波分复用技术的分布式多输入多输出混沌雷达. 2017年, 利用两个混沌外腔半导体激光器的外差产生的宽带白混沌雷达, Wang等[16]理论探索了一个测距分辨率和抗干扰能力得到加强的雷达系统. 2018年, Cheng等[22]利用自零差和时间门控技术产生一个脉冲外差混沌激光雷达, 以提高混沌激光雷达能量利用效率, 结果实现了目标测距的精度达到毫米量级水平, 目标检测范围达到100 m以上. 最近, 利用驱动-响应垂直腔面发射激光器(vertical cavity surface-emitting laser, VCSEL)系统的同步混沌偏振探测信号, 我们实现了两个目标的实时测距[23,24]. 此外, 利用三节点VCESLs网络中的6个同步混沌偏振探测信号, 我们探索了6个方位目标测距[25].
据我们所知, 相关CLR测距的分辨率在很大程度上受到混沌激光器带宽的限制. 测距分辨率的进一步提高需要具有大调制带宽的超快速混沌激光器. 最近提出的光泵浦自旋VCSEL[26]具有吸引人的特性, 例如, 激光输出的灵活自旋控制、飞秒量级的快速动态和大的调制带宽. 光注入或光反馈的光泵浦自旋VCSEL发射的超快混沌探测信号有望用于提高目标测距的分辨率和精度. 此外, 在己报道的关于CLR测距的工作[14,19,22,27,28]中, CLR通常用于目标中的固定点. 另外, 这些工作没有使用多束CLR, 测距目标数量受限于少量目标. 文献[27-29]提出的相关CLR测距的方案和方法不能完全检测目标中不同区域的距离, 不适合复杂形状目标中整个区域的精确测距, 基于相关CLR的探测波形在目标测距前没有被设计, 这影响了目标测距的分辨率和精度的进一步提高. 为了克服这些问题, 复杂形状目标中多区域CLR测距的理论和物理机理需要进一步探索, 实现的新方案和方法也需要进一步探讨. 因此, 本文基于外部光注入的光泵浦自旋VCSEL, 通过利用双极性sinc波形调制的两个混沌偏振波形, 提出了一种新颖的方案来实现两个复杂形状目标中的多区域精确测距. 在这个方案中, 两个调制的混沌偏振波形具有时间和空间上不相关的特性, 以及飞秒量级的快速动态特性. 利用这些特性, 通过计算多束延时反馈混沌偏振探测波形和与之相对应的参考波形的相关性, 探讨了两个复杂形状目标中的多区域测距的机理和实现方法. 最后论述了两个复杂形状目标中多区域的测距分辨率和相对误差.
 图 1 基于外部光注入的光泵浦自旋VCSEL的两个混沌偏振波形对两个复杂形状目标中多个区域的精确测距方案. 这里, DFB: 分布式反馈激光器; OI: 光学隔离器; NDF: 中密度滤器; PCOC: 偏振控制光路; FP: 光纤偏振器; FPCO: 光纤偏振控制器; FD: 光纤消偏器; FPC: 光纤偏振耦合器; PD: 光电探测器; AM: 振幅调制器; Spin-VCSEL: 自旋VCSEL; FPBS: 光纤偏振分束器; FBS: 光纤分束器; EA: 电放大器; TA: 发射天线; RA: 接收天线; T1 和T2: 两个待测目标; CFCM: 相关函数计算模块; TRCM: 目标测距计算模块; x-PC: x偏振分量; y-PC: y偏振分量;
图 1 基于外部光注入的光泵浦自旋VCSEL的两个混沌偏振波形对两个复杂形状目标中多个区域的精确测距方案. 这里, DFB: 分布式反馈激光器; OI: 光学隔离器; NDF: 中密度滤器; PCOC: 偏振控制光路; FP: 光纤偏振器; FPCO: 光纤偏振控制器; FD: 光纤消偏器; FPC: 光纤偏振耦合器; PD: 光电探测器; AM: 振幅调制器; Spin-VCSEL: 自旋VCSEL; FPBS: 光纤偏振分束器; FBS: 光纤分束器; EA: 电放大器; TA: 发射天线; RA: 接收天线; T1 和T2: 两个待测目标; CFCM: 相关函数计算模块; TRCM: 目标测距计算模块; x-PC: x偏振分量; y-PC: y偏振分量; 
Figure1. Schematic diagram of the precise ranging for the multi regions of two complex-shape targets by using two chaotic polarization radars in the optically pumped spin-VCSEL with optical injection. Here, DFB, distributed feedback laser; OI, optical isolator; NDF, neutral density filter; PCOC, polarization control optical circuit; FP, fiber polarizer; FPCO, fiber polarization controller; FD, fiber depolarizer; FPC, fiber polarization coupler; PD, photodetector; AM, amplitude modulator; Spin-VCSEL, spin vertical cavity surface emitting laser; FPBS, fiber polarization beam splitter; FBS, fiber beam splitter; EA, electric amplifier; TA, transmitting antenna; RA, receiving antenna; T1 and T2, two targets to be measured; CFCM, correlation function calculation module; TRCM, target ranging calculation module; x-PC, x polarization component; y-PC, y polarization component;

针对自旋VCSEL, 光场的左旋和右旋圆偏振分量改写为正交线性分量, 即


















































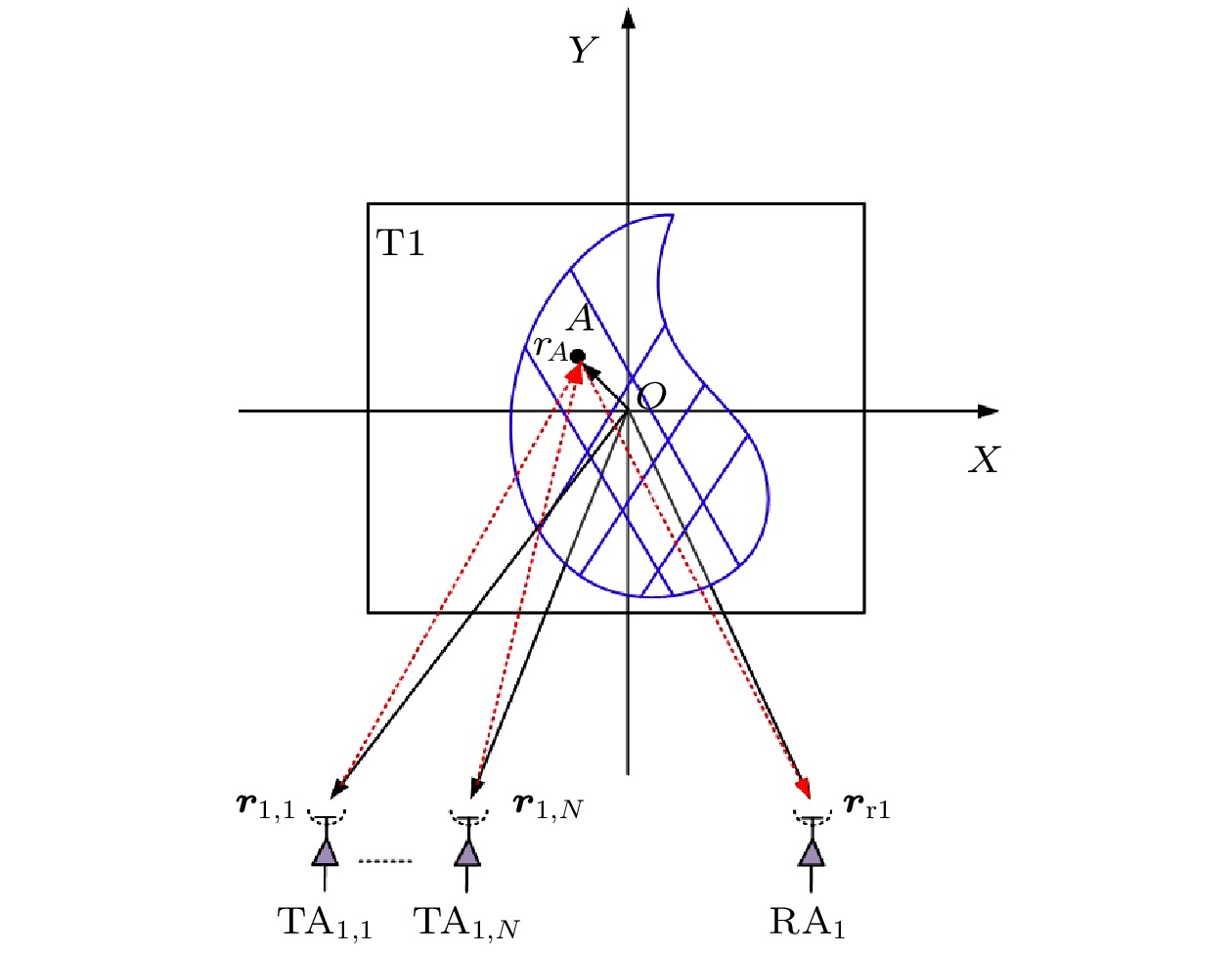 图 2 复杂形状目标T1中的任意小区域测距的几何图. 图中,
图 2 复杂形状目标T1中的任意小区域测距的几何图. 图中, 


Figure2. Geometry diagram of the ranging for arbitrary small area of the target T1. Here,
















| 符号 | 参数 | 值 |
| $ \alpha $ | 线宽增益因子 | 4 |
| $ \eta $ | 总归一化泵浦功率 | 9 |
| $ \kappa $ | 场衰减率 | 300 |
| p | 泵浦极化椭圆率 | 1 |
| $ \beta $ | 自发耦合因子 | $ 10^9 $ |
| $ \gamma $ | 电子密度衰减率 | $1\; {\rm {ns}}^{-1} $ |
| $\gamma_{\rm a}$ | 线性二向色性 | $10\; {\rm {ns}}^{-1} $ |
| $\gamma_{\rm p}$ | 线性双折射效应 | $60\; {\rm {ns}}^{-1} $ |
| $\gamma_{\rm s}$ | 自旋弛豫率 | $120\; {\rm {ns}}^{-1} $ |
| $ k_{xinj} $ | x-PC的光注入强度 | $10\; {\rm {ns}}^{-1} $ |
| $ k_{yinj} $ | y-PC的光注入强度 | $10\; {\rm {ns}}^{-1} $ |
| $ \Delta \omega $ | 频率失谐 | 30 × 109 rad/s |
表1用于计算的系统参数值
Table1.Parameter values of the system for calculations















 图 3 (a)用于调制第1束x偏振探测信号的sinc波形的时间轨迹; (b)用于调制第3束x偏振探测信号的sinc波形的时间轨迹; (c)第1束x偏探测信号(
图 3 (a)用于调制第1束x偏振探测信号的sinc波形的时间轨迹; (b)用于调制第3束x偏振探测信号的sinc波形的时间轨迹; (c)第1束x偏探测信号(

Figure3. (a) Temporal traces of the sinc waveform which are used to modulate the first beam of the x-polarization probe signal; (b) temporal traces of the sinc waveform which are used to the third beam of the x-polarization probe signal; (c) temporal traces of the first beam of the x-polarization probe signal (


 图 4 (a)第5束x偏振雷达探测信号的时间自相关(
图 4 (a)第5束x偏振雷达探测信号的时间自相关(

Figure4. (a) Time autocorrelation (


 图 5 (a)在10束x偏振雷达探测信号中, 两两之间的时空相关性(
图 5 (a)在10束x偏振雷达探测信号中, 两两之间的时空相关性(

Figure5. (a) Time-space correlation


图6给出了复杂形状目标T1中12个小区域的测距几何图. 为了方便讨论, T1中12个小区域被定义为










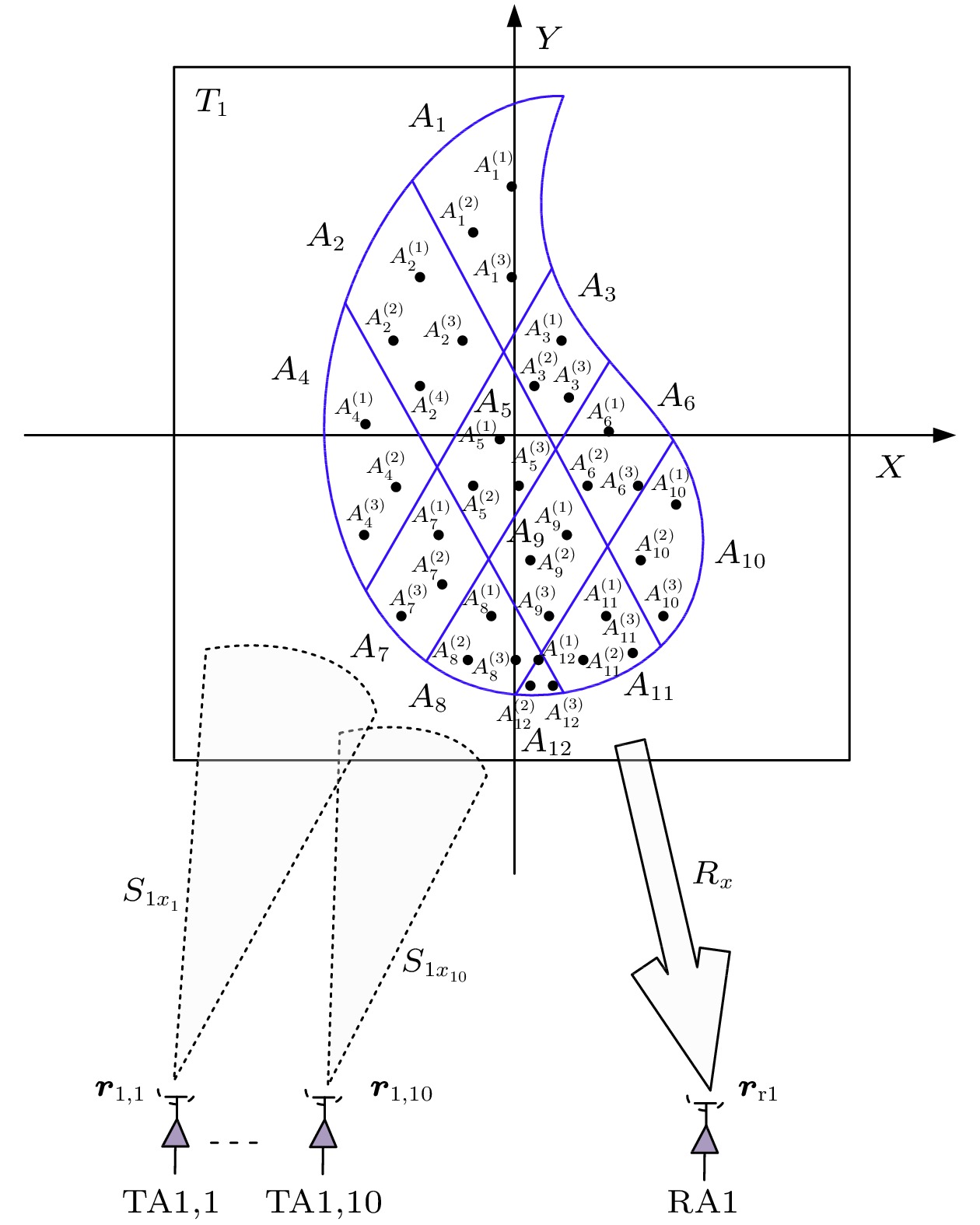 图 6 复杂形状目标T1中12个小区域目标测距的几何图. A1—A12: 12个小区域目标; TA1,1—TA1,10: 10个发射天线;
图 6 复杂形状目标T1中12个小区域目标测距的几何图. A1—A12: 12个小区域目标; TA1,1—TA1,10: 10个发射天线; 

Figure6. Geometry diagram of the ranging for twelve small areas in the complex-shape target T1. A1—A12, twelve small area targets; TA1,1—TA1,10, ten transmitting antennas;


| ${{\mathit{\boldsymbol{r}}}}_{{1}, {{{j}}}}$ | 位置矢量 | ${{\mathit{\boldsymbol{r}}}}_{{1}, {{{j}}}} $ | 位置矢量 | |
| $ {{\mathit{\boldsymbol{r}}}}_{{1}, {1}} $ | $-5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ | $ {{\mathit{\boldsymbol{r}}}}_{{1}, {6}} $ | $-2.5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3{{\mathit{\boldsymbol{e}}}}_{{y}} $ | |
| $ {{\mathit{\boldsymbol{r}}}}_{{1}, {2}} $ | $ -4.5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ | $ {{\mathit{\boldsymbol{r}}}}_{{1}, {7}} $ | $-2 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ | |
| $ {{\mathit{\boldsymbol{r}}}}_{{1}, {3}} $ | $-4 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ | $ {{\mathit{\boldsymbol{r}}}}_{{1}, {8}} $ | $ -1.5{{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ | |
| $ {{\mathit{\boldsymbol{r}}}}_{{1}, {4}} $ | $-3.5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ | $ {{\mathit{\boldsymbol{r}}}}_{{1}, {9}} $ | $-1 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ | |
| $ {{\mathit{\boldsymbol{r}}}}_{{1}, {5}} $ | $-3 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ | $ {{\mathit{\boldsymbol{r}}}}_{{1}, {10}} $ | $-0.5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ |
表2发射天线(TA1,1—TA1,10)的位置矢量
Table2.Position vectors of the transmitting antennas (TA1,1—TA1,10)
| 小区域$ A_{j} $ | 目标点$ A^{(\iota)}_{j} $ | $ {{\mathit{\boldsymbol{d}}}}_{{{A}}^{(\iota)}_{j}} $ | $ \overline{{{\mathit{\boldsymbol{r}}}}}_{{{A}}^{(\iota)}_{j}} $ | $ RE^{(\iota)}_{j} $ |
| $ A_1 $ | $ A^{(1)}_1 $ | 0$ {{\mathit{\boldsymbol{e}}}}_{x}$ + 0.2$ {{\mathit{\boldsymbol{e}}}}_y$ | –0.0001$ {{\mathit{\boldsymbol{e}}}}_{x}$ + 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.04% |
| $ A^{(2)}_1 $ | –0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.17$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.0498$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.17$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.14% | |
| $ A^{(3)}_1 $ | 0$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.0002$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.13% | |
| $ A_2 $ | $ A^{(1)}_2 $ | –0.1$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.0999$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.07% |
| $ A^{(2)}_2 $ | –0.12$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.1199$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.05% | |
| $ A^{(3)}_2 $ | –0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.0499$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1001$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.09% | |
| $ A^{(4)}_2 $ | –0.1$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.03$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.1002$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.03$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.19% | |
| $ A_3 $ | $ A^{(1)}_3 $ | 0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0501$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.06% |
| $ A^{(2)}_3 $ | 0.02$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.03$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0197$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.03$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.88% | |
| $ A^{(3)}_3 $ | 0.06$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.02$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0597$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.02$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.49% | |
| $ A_4 $ | $ A^{(1)}_4 $ | –0.16$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.01$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.1599$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.01$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.08% |
| $ A^{(2)}_4 $ | –0.12$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.1197$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.21% | |
| $ A^{(3)}_4 $ | –0.16$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.1602$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.11% | |
| $ A_5 $ | $ A^{(1)}_5 $ | –0.02$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.0198$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.94% |
| $ A^{(2)}_5 $ | –0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | 0 | |
| $ A^{(3)}_5 $ | 0$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0001$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.19% | |
| $ A_6 $ | $ A^{(1)}_6 $ | 0.1$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.1003$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.31% |
| $ A^{(2)}_6 $ | 0.08$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0796$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.4% | |
| $ A^{(3)}_6 $ | 0.13$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.1301$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.0$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.05% | |
| $ A_7 $ | $ A^{(1)}_7 $ | –0.08$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.0803$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.4% |
| $ A^{(2)}_7 $ | –0.07$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.0705$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.38% | |
| $ A^{(3)}_7 $ | –0.12$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.1204$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.21% | |
| $ A_8 $ | $ A^{(1)}_8 $ | –0.03$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.0299$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.05% |
| $ A^{(2)}_8 $ | –0.07$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ | –0.07$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ | 0 | |
| $ A^{(3)}_8 $ | 0$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0001$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.04% | |
| $ A_9 $ | $ A^{(1)}_9 $ | 0.06$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0599$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.08% |
| $ A^{(2)}_9 $ | 0.02$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0203$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.24% | |
| $ A^{(3)}_9 $ | 0.04$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0401$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.02% | |
| $ A_{10} $ | $ A^{(1)}_{10} $ | 0.18$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.07$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.18$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.0701$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.02% |
| $ A^{(2)}_{10} $ | 0.13$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.1297$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.18% | |
| $ A^{(3)}_{10} $ | 0.15$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.1501$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.07% | |
| $ A_{11} $ | $ A^{(1)}_{11} $ | 0.0 $ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0898$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.12% |
| $ A^{(2)}_{11} $ | 0.06$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0598$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.25$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.07% | |
| $ A^{(3)}_{11} $ | 0.13$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.19$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.1302$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.19$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.09% | |
| $ A_{12} $ | $ A^{(1)}_{12} $ | 0.02$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0197$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.15% |
| $ A^{(2)}_{12} $ | 0.03$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.22$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0297$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.22$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.16% | |
| $ A^{(3)}_{12} $ | 0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.22$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.0501$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.22$ {{\mathit{\boldsymbol{e}}}}_y $ | 0.02% |
表3目标T1的每个小区域中3—4个目标点的实际位置矢量(


Table3.Actual position vectors (


根据方程(16)给出的相关函数CC1的最大期望值, 可以得到一组延迟时间(



















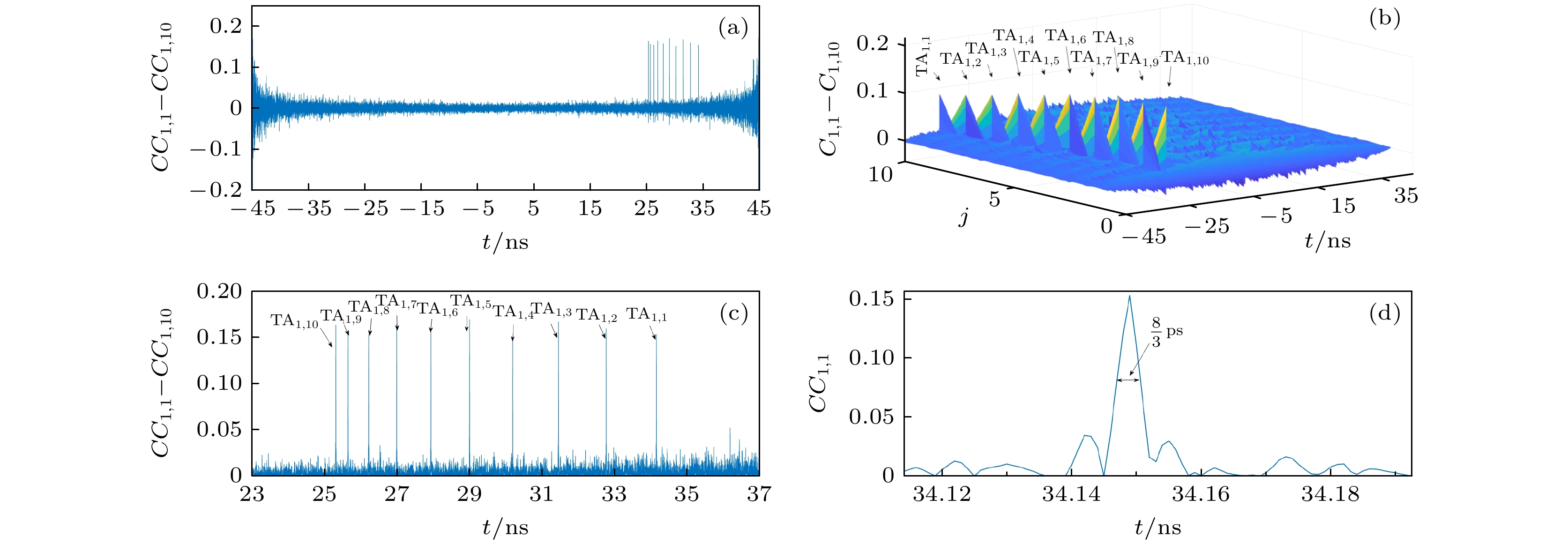 图 7 (a)针对目标点
图 7 (a)针对目标点


Figure7. (a) For the target point-



根据文献[34], 相关峰的半极大处全宽(full width at half maximum, FWHM)通常用于描述测距分辨率(ranging resolution, RR). 从图7(d)可以看出, 相关函数
















 图 8 目标点
图 8 目标点








Figure8. Dependences of the range resolutions (RR) for the target point-







 图 9 测距相对误差RE与目标T1中任意目标点与第1束x偏振雷达探测信号源之间的距离d的依赖关系
图 9 测距相对误差RE与目标T1中任意目标点与第1束x偏振雷达探测信号源之间的距离d的依赖关系Figure9. Dependence of the ranging relative error RE on the distance d between the arbitrary target point and the first beam of the x-polarization radar probe signal source.
需要特别注意的是, 由于x偏振和y偏振雷达探测信号对目标T1和T2分别独立测量, 并且测距原理相同, 因此, 在本文提出的方案中, y偏振雷达探测信号对目标T2的测距结果(包括测距分辨率和测距相对误差)与x 偏振雷达探测信号对目标T1的测距结果是几乎相同的. 另外, 本文提出的测距方案能够实现0.4 mm分辨率的关键现实条件是: 1)需要具有飞秒量级快速动态的激光光源; 2)需要用高质量自相关函数对激光器输出的探测光波进行调制, 使其具有时空不相关特性; 3)方案中涉及的相关光路中的光器件带宽要足够宽, 例如, 光电探测器的带宽约100 GHz.
