Fund Project:Project supported by the National Key Research and Development Program of China (Grant No. 2016YFB0501201) and the National Project for Research and Development of Major Scientific Instruments (Grant No. 51827806)
Received Date:16 November 2020
Accepted Date:21 December 2020
Available Online:11 March 2021
Published Online:20 March 2021
Abstract:Measurement technology with nanometer scale or higher level precision is the basis and guarantee for developing atomic and close-to-atomic scale manufacturing. Optical measurement has the advantages of high precision, wide range and real-time measurement. The precision of localizing a single imaging spot’s center is not limited by the diffraction limit and could reach nanometer scale. However, the shot noise of light and the dark current noise of the detector bring about a precision limit for optical measurement. Based on the Cramer-Rao lower bound theory, a precision limit estimation method for general imaging profiles is developed in this paper. Taking the typical Airy spot for example, the influences of the parameters such as signal-to-noise ratio, energy concentration and processing method on the positioning precision limit are analyzed, and suggestions and conclusions for improving the measurement precision are given. The precision limit of a laboratory imaging spot is calculated, which verifies that the conclusions are also suitable for the imaging profiles similar to the Airy spot. The research provides the analytical method and theoretical guidance for the application and optimization of optical measurement in atomic and close-to-atomic scale manufacturing. Keywords:atomic and close-to-atomic scale manufacturing/ optical measurement/ precision limit
将(17)式代入(1)式, 即可得到${g_{ij}}({x_0}, {y_0})$, 进而根据(12)式, 可计算不同参数与精度极限之间的关系. 图1给出了艾里斑的光强分布函数和像素灰度响应的示例, 两个灰度响应的差异是因为像斑中心落在了像素内的不同位置. 图 1 艾里斑的光强分布函数及相应的像素灰度响应示例 Figure1. Intensity function of an Airy spot and its corresponding pixel response.
3.艾里斑光学测量精度极限分析23.1.能量与噪声 -->
3.1.能量与噪声
像斑的能量、散粒噪声、探测器暗电流噪声是影响图像信噪比的参数. 由(12)式, 这些噪声和能量耦合在一起, 无法通过单个或多个像素的信噪比直接对精度极限进行评估. 因此通过仿真的方式, 对表征像斑能量和散粒噪声的${I_{\rm{0}}}$, 表征暗电流噪声的$\sigma _{\rm{d}}^2$进行分析. 仿真条件为F数取4, 像素尺寸为2 μm, 波长为500 nm, 中心强度为400光子数/μm2, 暗电流噪声$\sigma _{\rm{d}}^{\rm{2}}$分别设置为0和25 (如果探测器光电子转灰度的增益为0.2, 则$\sigma _{\rm{d}}^{\rm{2}} = {\rm{25}}$对应的灰度值标准差为1). 由(12)式, 精度极限与像斑中心的位置有关. 将像斑中心分别均匀落在一个像素的不同位置内, 计算对像斑横坐标${x_{\rm{0}}}$估计的精度极限. 其中像斑中心相对于像素边缘的位置, 称为像素相位. 仿真结果如图2所示, 精度极限和像素相位的关系为一个复杂的曲面, 无暗电流噪声时, 在此仿真条件下, 定位精度极限约为0.013像素, 暗电流噪声的出现使得精度极限变差. 图 2 精度极限-像素相位曲面 (a) 中心强度为400, 暗电流噪声为0; (b) 中心强度为400, 暗电流噪声为25 Figure2. Relationship of the precision limit to the x and y pixel phase: (a) The central intensity is 400, the dark current noise is 0; (b) the central intensity is 400, the dark current noise is 25.
进一步地, 取y像素相位为0.5的截面, 分别在${I_{\rm{0}}} = {{400}}$, $\sigma _{\rm{d}}^{\rm{2}} = {{0,\; 25,\; 100,\; 400}}$和${I_{\rm{0}}} = 400,\; 800, $$ 1600,\; 3200$, $\sigma _{\rm{d}}^{\rm{2}} = {{400}}$的条件下计算x方向精度极限与x方向像素相位的曲线并进行对比, 结果如图3所示. 固然像斑能量越高, 暗电流噪声越小, 精度极限越好. 值得注意的是, 当暗电流噪声不可忽略而像斑能量又不够高时, 精度极限曲线的波动幅度变大, 这意味着像斑中心位于像素中心和位于像素边缘时定位精度有较大的差异, 在像素边缘处能够实现更高的定位精度. 图 3y像素相位为0.5时的精度极限-x像素相位曲线 (a) 中心强度为400, 暗电流噪声分别取0, 25, 100, 400; (b) 暗电流噪声为400, 中心强度分别取400, 800, 1600, 3200 Figure3. Relationship of the precision limit and the x pixel phase when the y pixel phase is 0.5: (a) The central intensity is 400, the dark current noise is 0, 25, 100, 400, respectively; (b) the dark current noise is 400, the central intensity is 400, 800, 1600, 3200, respectively.
采用图2(b)中的仿真条件, 保持艾里斑能量总值不变, 将F数由4分别变为2和8, 结果如图4所示. 对比图2(b)可知, F数较小时, 即像斑能量集中时, 精度极限曲面波动很大, 在像素边缘处取得最优定位精度, 但在像素中心位置定位精度很差. 而F数较大时, 精度极限曲面波动较小, 指标相对于前者来说比较折中. 另外, 在估计${x_0}$时y方向位置影响较小. 图 4 精度极限-像素相位曲面 (a) F数为2; (b) F数为8 Figure4. Relationship of the precision limit to the x and y pixel phase: (a) The F of the optical system is 2; (b) the F of the optical system is 8.
RF反映了像斑的能量集中度情况, RF越小, 像斑能量集中度越高, 在像面上覆盖的像素数越少. 即使F数、$\lambda $、$h$发生改变, 只要RF不变, 则像斑集中程度不变, 精度极限(以像素为单位)不变. 在艾里斑能量总值不变的条件下, 改变RF, y像素相位为0.5时, x方向精度曲线和x像素相位的关系如图5所示. 可以看出, RF越小, 在像素边缘位置定位精度越高, 但牺牲了像素中心位置的精度. 而如果追求较好的总体精度指标σall, 应该将RF调到一个适当小的数值, 在此例中RF为1左右, σall较好. 图 5y像素相位为0.5时的精度极限-x像素相位曲线 Figure5. Relationship of the precision limit and the x pixel phase when the y pixel phase is 0.5.
由(3)式, 局部区域$A$的选择也会对定位精度造成影响. 取RF = 2, 此时中央亮斑半径为2.44像素, 其他仿真条件与3.2节中相同, 分析不同大小的计算窗口对精度极限的影响. 在3.1和3.2节中计算窗口均能包含中央亮斑全部能量, 如图4(b)窗口设为11 × 11像素, 此时分别设置窗口大小为3 × 3和5 × 5, 结果如图6所示. 当窗口太小涵盖不到中央亮斑的全部能量时, 精度极限较差. 而窗口为5 × 5和图4(b)中11 × 11精度结果差别不大. 图 6 精度极限-像素相位曲面 (a) 计算窗口为3 × 3; (b) 计算窗口为5 × 5 Figure6. Relationship of the precision limit to the x and y pixel phase: (a) The size of the window used for localization is 3 × 3; (b) the size of the window is 5 × 5.
图 8 实验室像斑的精度极限-x像素相位曲线 (a) 能量较集中强度分布; (b) 能量较发散强度分布 Figure8. Relationship of the precision limit and the x pixel phase for laboratory obtained image spots: (a) The precision limit for a energy concentrated spot; (b) the precision limit for a spot with lower energy concentration.









































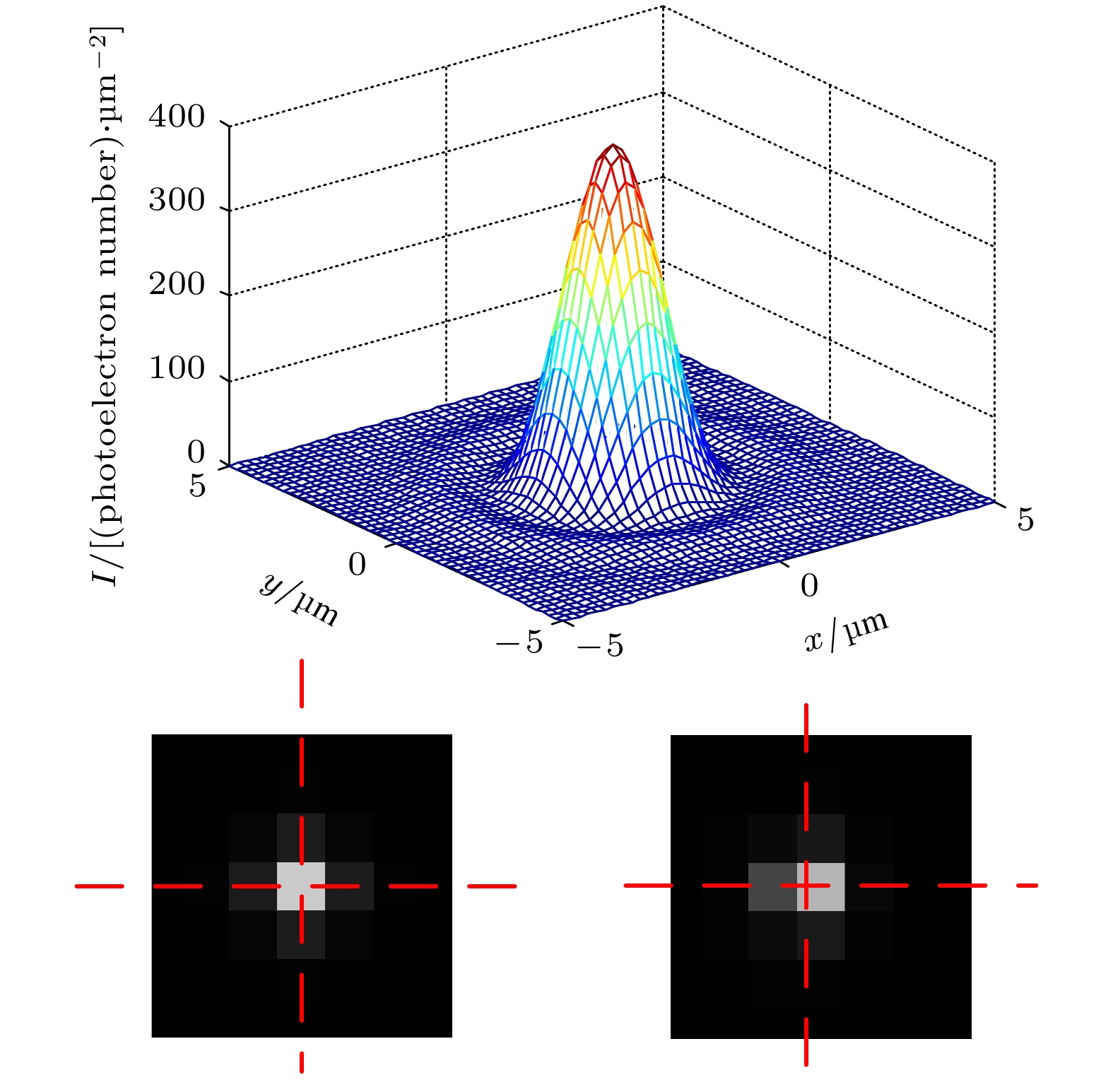 图 1 艾里斑的光强分布函数及相应的像素灰度响应示例
图 1 艾里斑的光强分布函数及相应的像素灰度响应示例




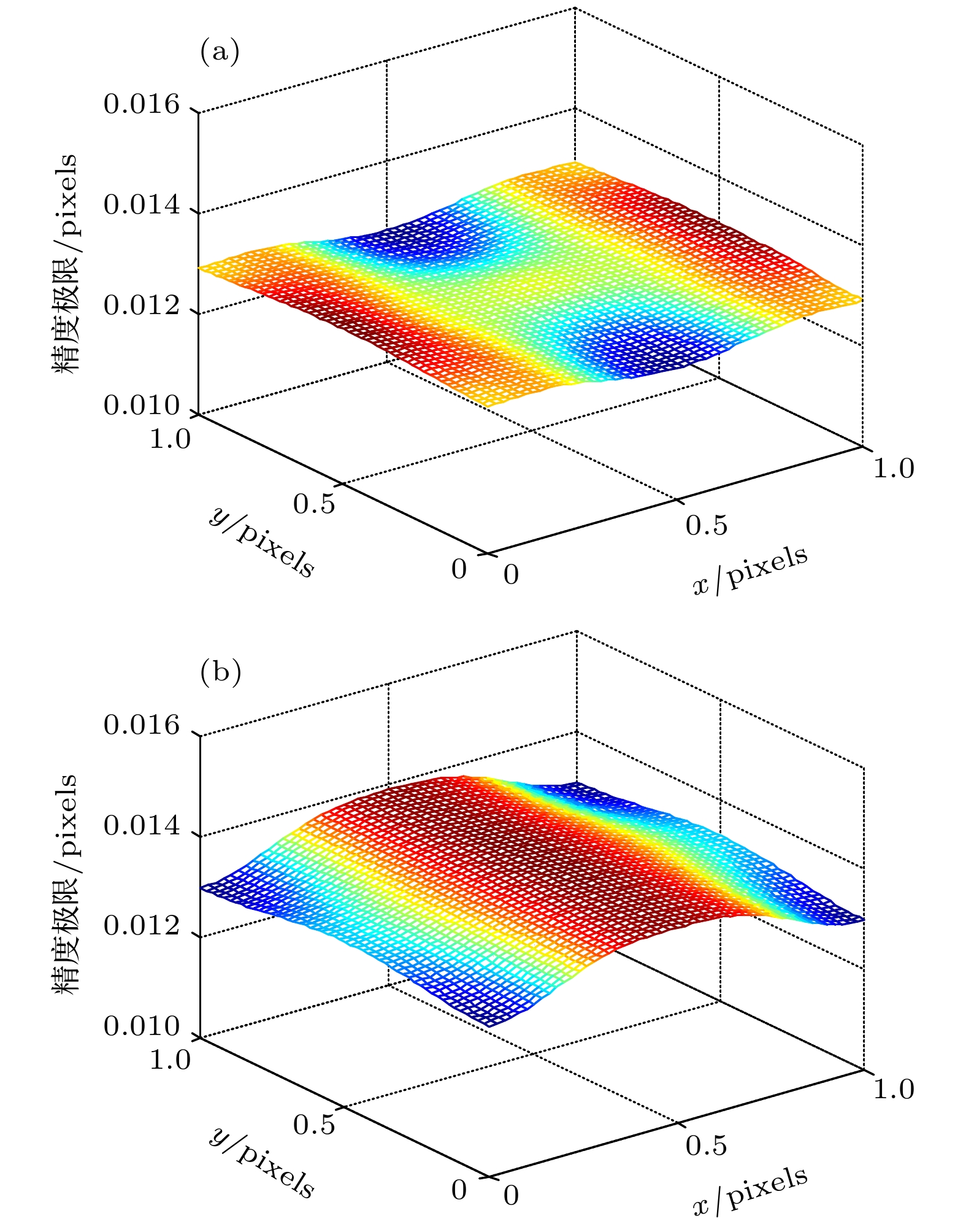 图 2 精度极限-像素相位曲面 (a) 中心强度为400, 暗电流噪声为0; (b) 中心强度为400, 暗电流噪声为25
图 2 精度极限-像素相位曲面 (a) 中心强度为400, 暗电流噪声为0; (b) 中心强度为400, 暗电流噪声为25




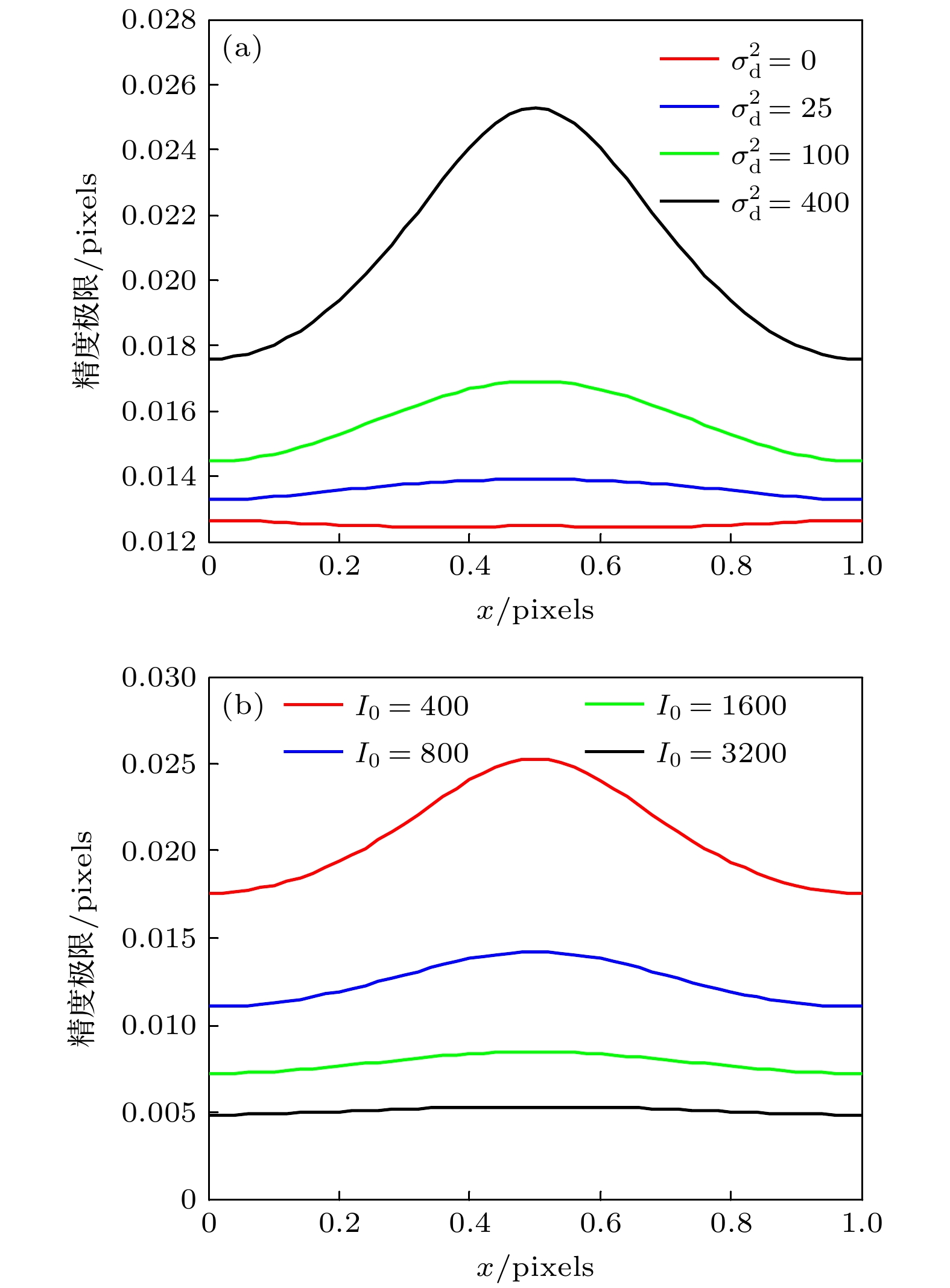 图 3 y像素相位为0.5时的精度极限-x像素相位曲线 (a) 中心强度为400, 暗电流噪声分别取0, 25, 100, 400; (b) 暗电流噪声为400, 中心强度分别取400, 800, 1600, 3200
图 3 y像素相位为0.5时的精度极限-x像素相位曲线 (a) 中心强度为400, 暗电流噪声分别取0, 25, 100, 400; (b) 暗电流噪声为400, 中心强度分别取400, 800, 1600, 3200






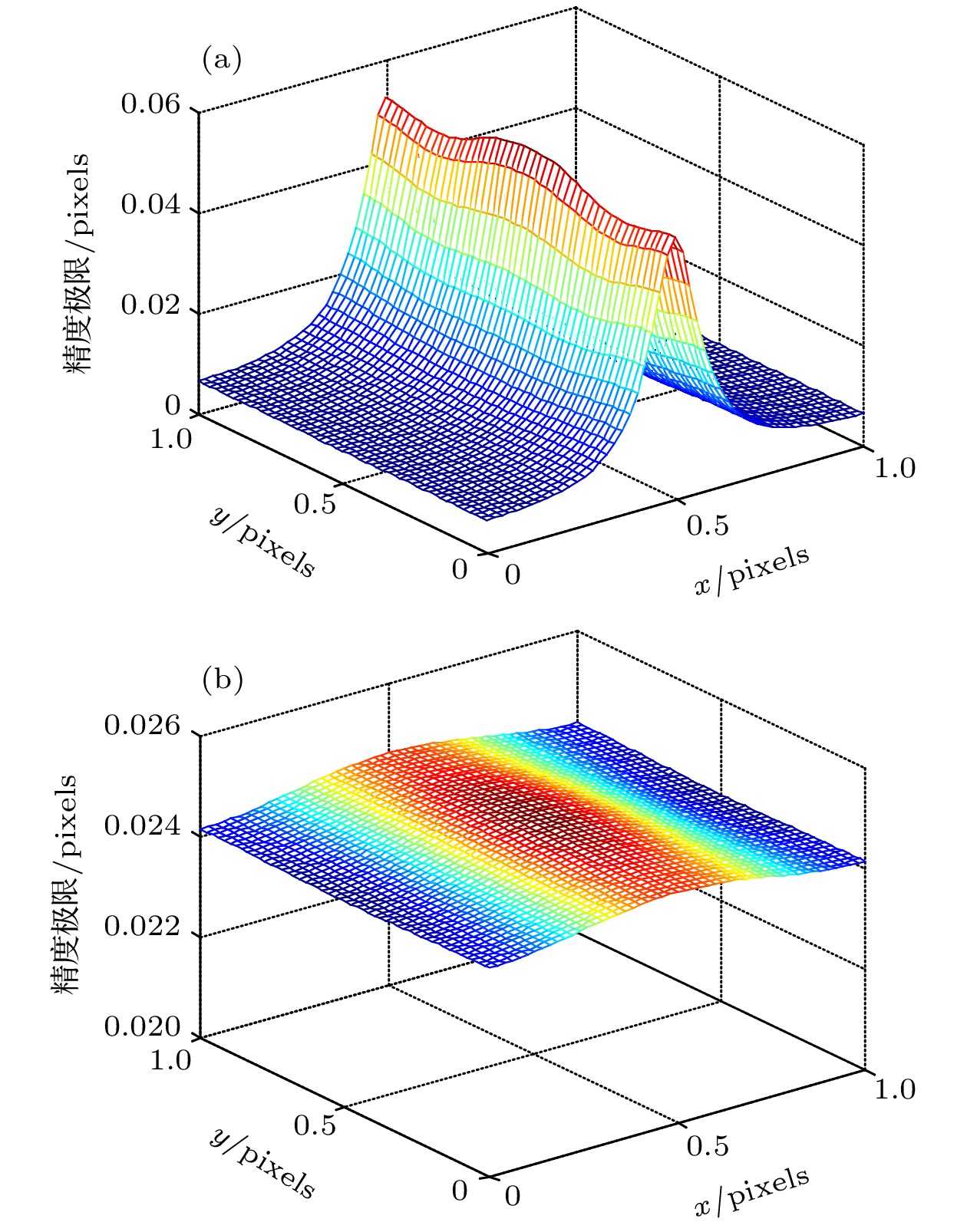 图 4 精度极限-像素相位曲面 (a) F数为2; (b) F数为8
图 4 精度极限-像素相位曲面 (a) F数为2; (b) F数为8




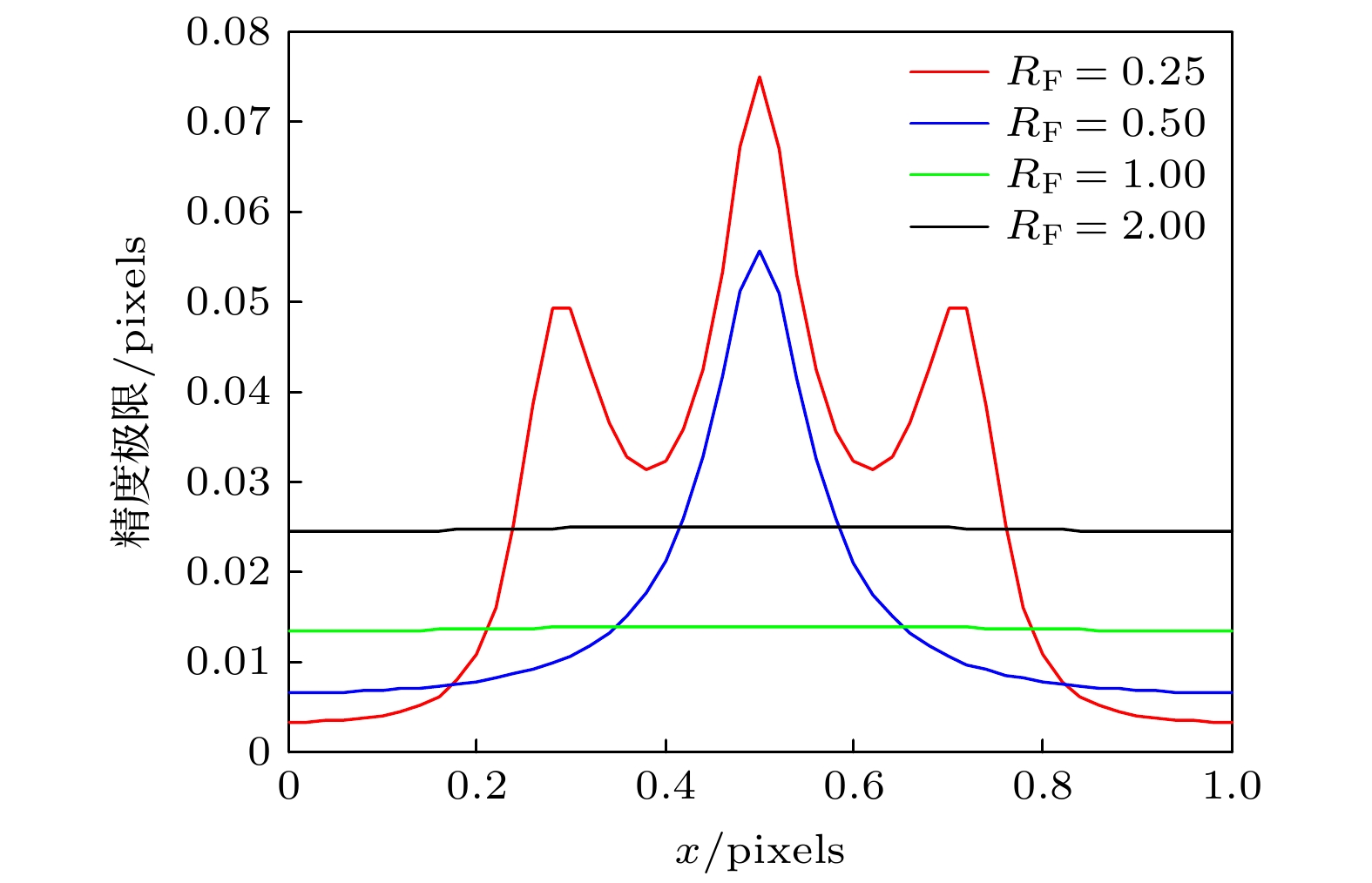 图 5 y像素相位为0.5时的精度极限-x像素相位曲线
图 5 y像素相位为0.5时的精度极限-x像素相位曲线


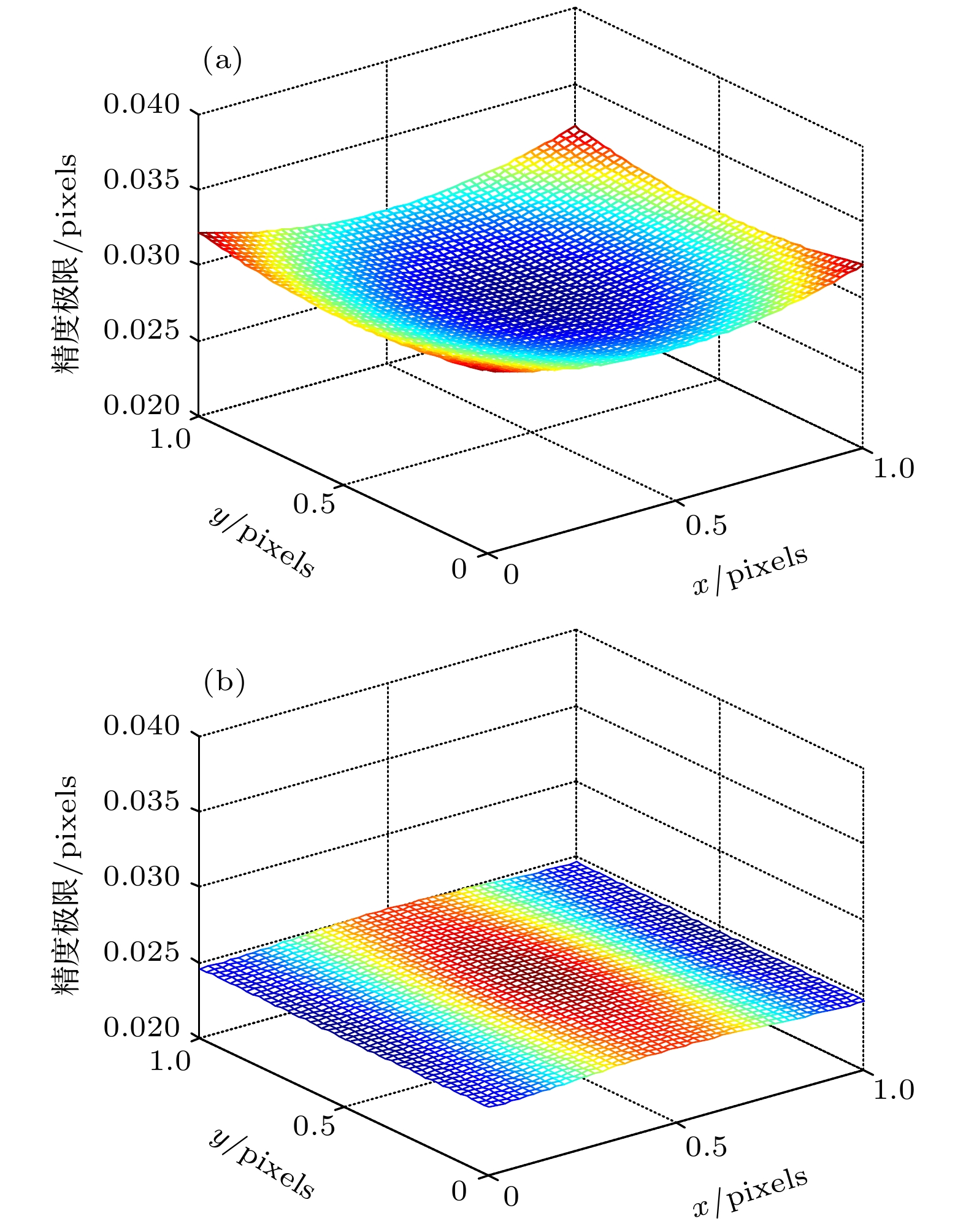 图 6 精度极限-像素相位曲面 (a) 计算窗口为3 × 3; (b) 计算窗口为5 × 5
图 6 精度极限-像素相位曲面 (a) 计算窗口为3 × 3; (b) 计算窗口为5 × 5



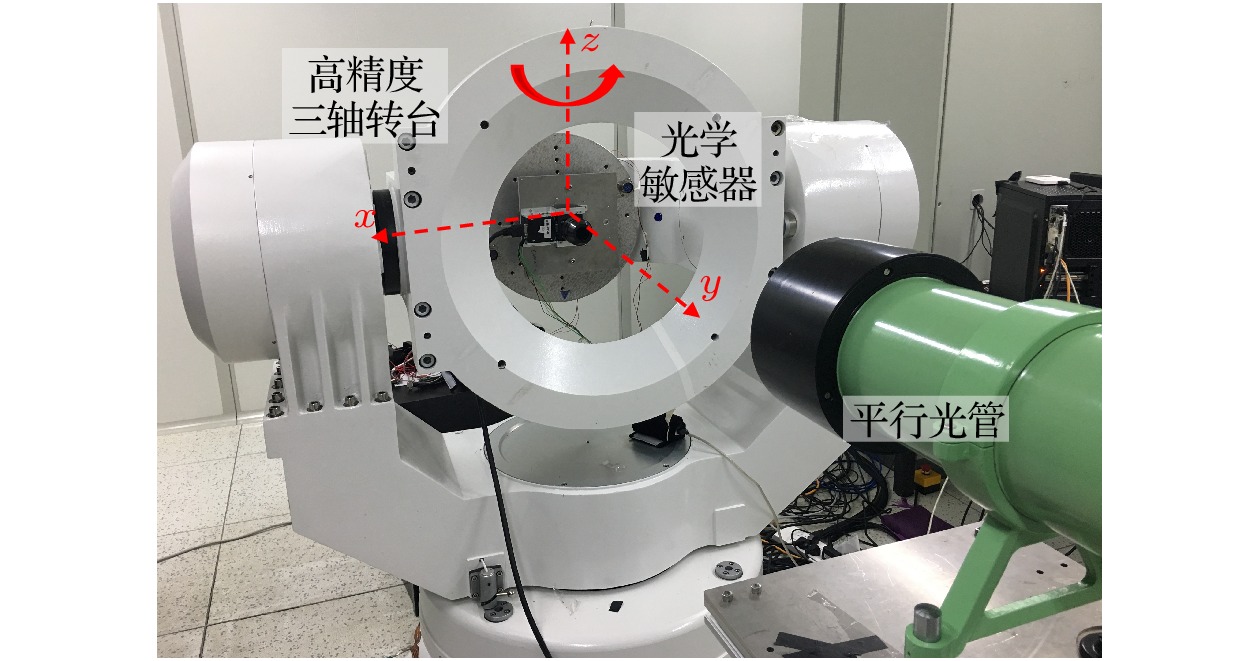 图 7 实验平台
图 7 实验平台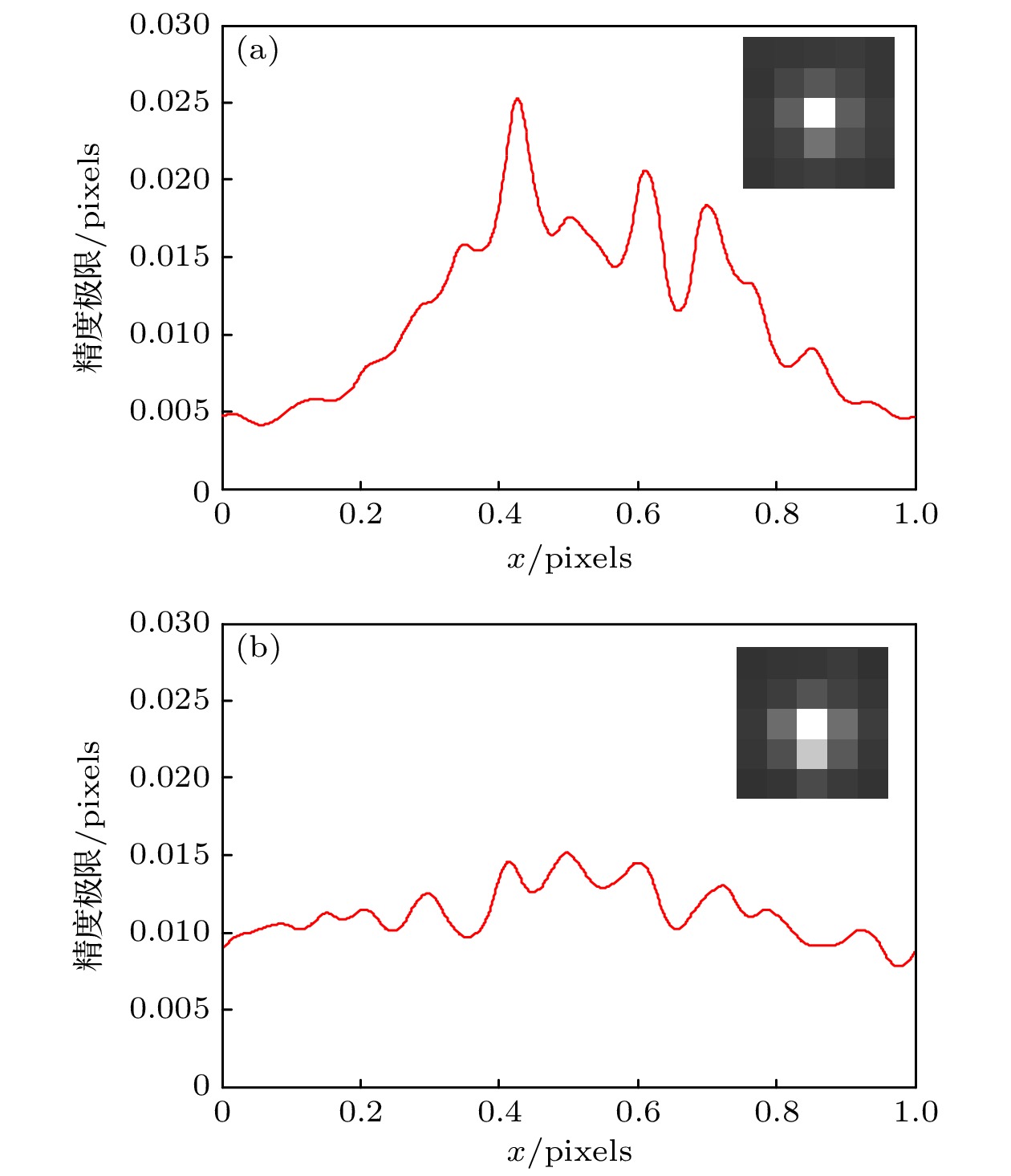 图 8 实验室像斑的精度极限-x像素相位曲线 (a) 能量较集中强度分布; (b) 能量较发散强度分布
图 8 实验室像斑的精度极限-x像素相位曲线 (a) 能量较集中强度分布; (b) 能量较发散强度分布