Fund Project:Project supported by the National Key R&D Program of China (Grant Nos. 2017YFC0601602, 2016YFF0200206), the National Natural Science Foundation of China (Grant Nos. 51905482, 61727821, 61875175, 11704334), and the China Aero Geophysical Survey and Remote Sensing Center for Natural Resources Program (Grant No. DD20189831).
Received Date:13 September 2020
Accepted Date:23 October 2020
Available Online:06 February 2021
Published Online:20 February 2021
Abstract:The gravity field is one of the basic physical fields of the Earth. Dynamic measurements could improve the efficiency of gravity surveying and mapping, and have very important applications in the fields of geological survey, geophysics, resource exploration, inertial navigation and so on. Currently, dynamic gravity measurements are mostly based on relative measurements. The dynamic relative gravimeters have the problem of zero drift, which affects the measurement performance. Dynamic absolute gravimeters can provide synchronous and co-site calibration for relative gravimeters and solve the problem of long drift. Therefore dynamic absolute gravimeters have attracted much attention. Based on a homemade atomic gravimeter and an inertial stable platform, a system of absolute gravity dynamic measurement has been built on a ship. The dynamic measurement experiments of absolute gravity under the state of ship-borne mooring have been carried out. It is found that the frequency of vibration noises of this ship is around 0.2 Hz, and the amplitude is about 1 Gal. In the case of harsh environment, the temperature and humidity of the used container have been controlled to be 25 ℃ and 70% via the air conditioning. Then, a continuous gravity measurement of 5 hour has been taken, and the peak to peak value of 80 mGal has been achieved. The values of gravity have no drifts at all during the measurements. Besides, the sensitivity of gravity measurement has been evaluated to be 16.6 mGal/Hz–1/2 under the environment of ship-borne mooring. A resolution of 0.7 mGal could be reached with an integration time of 1000 s. The stability of this system has been estimated after the measurement of absolute gravity for two weeks, and the change of absolute gravity values is about 0.5 mGal. Finally, in order to evaluate the accuracy of the dynamic measurement of absolute gravity, the measured average value of absolute gravity at ship-borne has been compared with the value of the high-precision absolute gravity reference point of the pier, and the results are estimated to be (–0.072 ± 0.134) mGal. The results of this paper could provide a new solution for the simultaneous and co-site calibration of the ocean relative gravimeter on the same ship. Keywords:cold atom/ atom interferometer/ atomic gravimeter/ absolute gravity measurement
2.动态绝对重力测量系统原理如图1所示, 动态绝对重力测量系统主要由原子重力仪、惯性稳定平台和集装箱组成. 其中, 原子重力仪刚性固定在惯性稳定平台上部, 惯性稳定平台放置于集装箱内部. 原子重力仪是整个测量系统的核心, 主要用于测量垂向的重力加速度; 惯性稳定平台用于实现原子重力仪的姿态控制, 使其在船载系泊动态环境下仍处于垂线方向; 集装箱主要用于温湿度控制, 为整个外场实验提供一个良好的测量环境. 图 1 船载系泊状态下的绝对重力测量系统原理图 Figure1. The schematic diagram of absolute gravity measurement system under mooring state of a ship.
3.实验系统及实验过程实验系统的示意图如图2所示. 整个测量系统主要包括三个部分: 原子重力仪、惯性稳定平台、辅助单元, 系统整体集成在一个20英尺的集装箱内(外部尺寸为5.89 m × 2.35 m × 2.39 m). 下面分别对系统的各个部分进行简要介绍. 图 2 实验系统的示意图 Figure2. The schematic diagram of the experimental system.
本次实验在浙江省舟山市某码头进行, 测试船停靠码头, 处于系泊状态. 图3红色虚线框内为测试用集装箱, 集装箱内为船载冷原子绝对重力测量系统. 测试码头现有一个绝对重力基准点, 离船上测试位置约50 m, 可用于验证测量到的绝对重力值. 因实验时间正值夏季, 码头测量环境较为恶劣, 集装箱表面温度长期在45 ℃以上, 测量期间常有7—8级大风, 时常有强降雨, 码头其他货物装卸活动也会对高精度重力测量产生影响. 图 3 实验测试现场图 Figure3. The photo of the experimental test.
由于船体始终处于运动状态, 船体高度变化曲线如图4(a)所示. 实验期间船体高度日均变化约为2.5 m. 置于拉曼反射镜下的高精度加速度计测量了船体的加速度噪声功率谱, 如图4(b)所示, 低频0.2 Hz有一个峰, 幅度超过10–2 m/s2 (1 Gal). 图 4 船载测量环境 (a)船体高度变化; (b)船体加速度噪声功率谱 Figure4. The measuremental environment of the ship: (a) The variation of the altitude of the ship; (b) the noise power spectrum density of the acceleration of the ship.
24.2.船载系泊状态下的绝对重力测量结果 -->
4.2.船载系泊状态下的绝对重力测量结果
在原子重力仪调试完成后, 开展绝对重力测量实验. 首先, 运行原子重力仪采集原子布居数信号(T = 10 ms); 同时, 基于拉曼反射镜下的高精度加速度计记录干扰加速度信号, 并同步传给数据采集卡; 结合原子干涉仪的权重函数, 通过(2)式积分得到干扰加速度对原子干涉条纹的相位贡献. 利用该相位可以还原出原子干涉条纹, 如图5所示, 蓝色空心四边形是实测的原始原子布居数信号, 黑色空心三角形是振动补偿修正后的数据, 红线是相应的拟合曲线, 通过拟合干涉条纹的相位最终提取重力加速度的信息. 图 5 原子干涉条纹信号(T = 10 ms). 蓝色空心四边形: 原始原子布居数信号; 黑色空心三角形: 振动修正后信号; 红线: 拟合曲线 Figure5. The signals of atomic interference fringes (T = 10 ms). Blue dots: The original signals of atomic population; Black dots: The signals after vibration correction; Red line: the fitted curve.
在恢复原子干涉条纹后, 进一步开展系泊状态下的短期连续重力测量实验. 图6所示为连续5个多小时的测量数据, 灰点为实测原始数据, 红线为8 min移动平均后的数据, 测量数据已经修正潮汐和船体高度变化引起的时变重力值. 由实验数据可知, 重力值变化的峰峰值约为80 mGal, 测量值无明显漂移. 计算这些数据点的艾伦偏差(如图7所示), 可评估重力测量的灵敏度, 约为16.6 mGal/Hz–1/2, 1000 s积分时间内重力测量的分辨率可达0.7 mGal. 图 6 系泊状态下的连续重力变化数据. 灰点: 原始重力数据; 红线: 移动平均后的数据 Figure6. The continuous changes of gravity under mooring state of a ship. Grey dots: The original data of measured gravity; Red line: The data after the dealing of moving average.
图 7 船载系泊状态下的重力测量灵敏度评估 Figure7. The sensitivity evaluation of measured gravity data when the ship is moored.
 图 1 船载系泊状态下的绝对重力测量系统原理图
图 1 船载系泊状态下的绝对重力测量系统原理图

















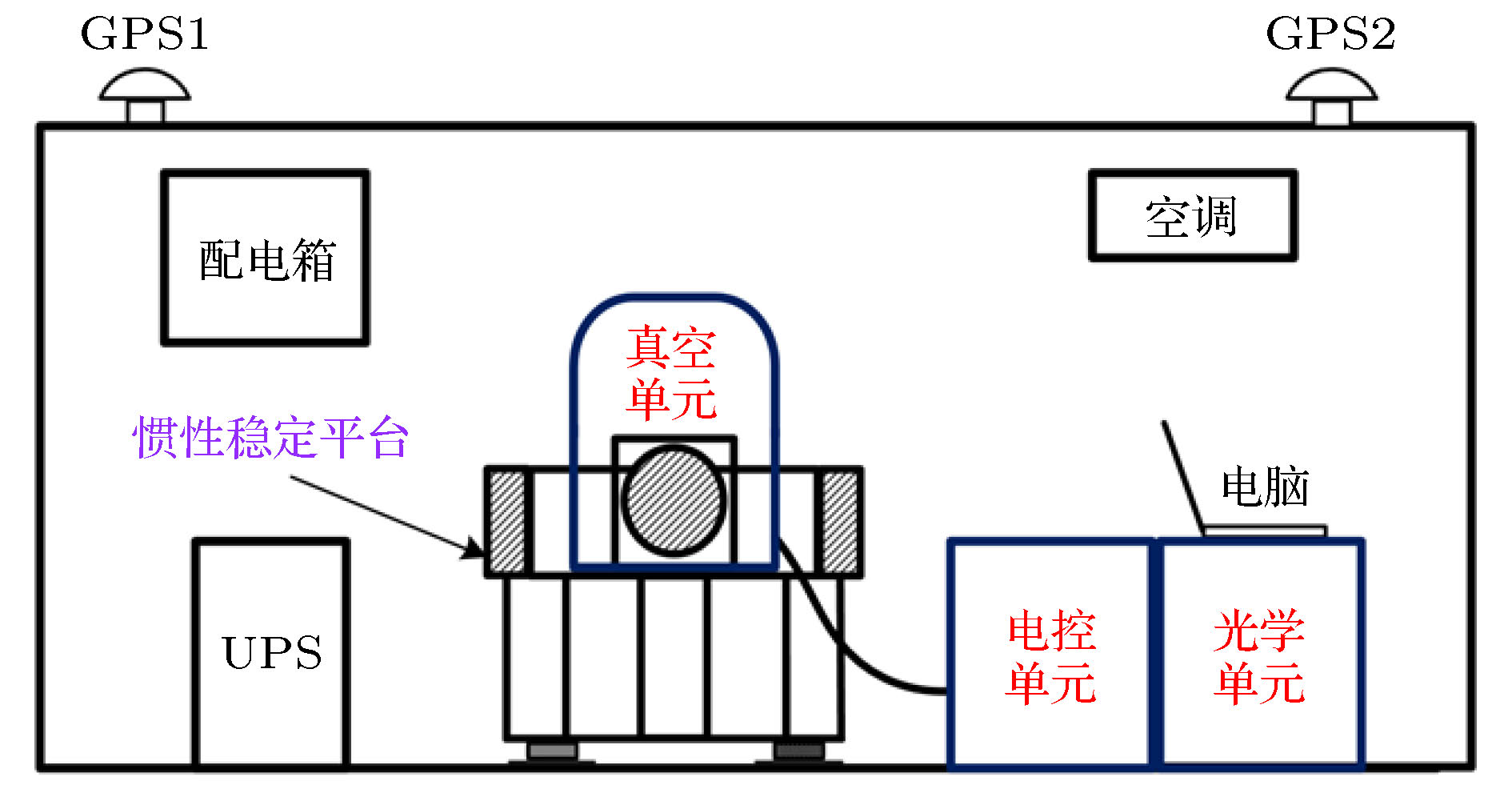 图 2 实验系统的示意图
图 2 实验系统的示意图 图 3 实验测试现场图
图 3 实验测试现场图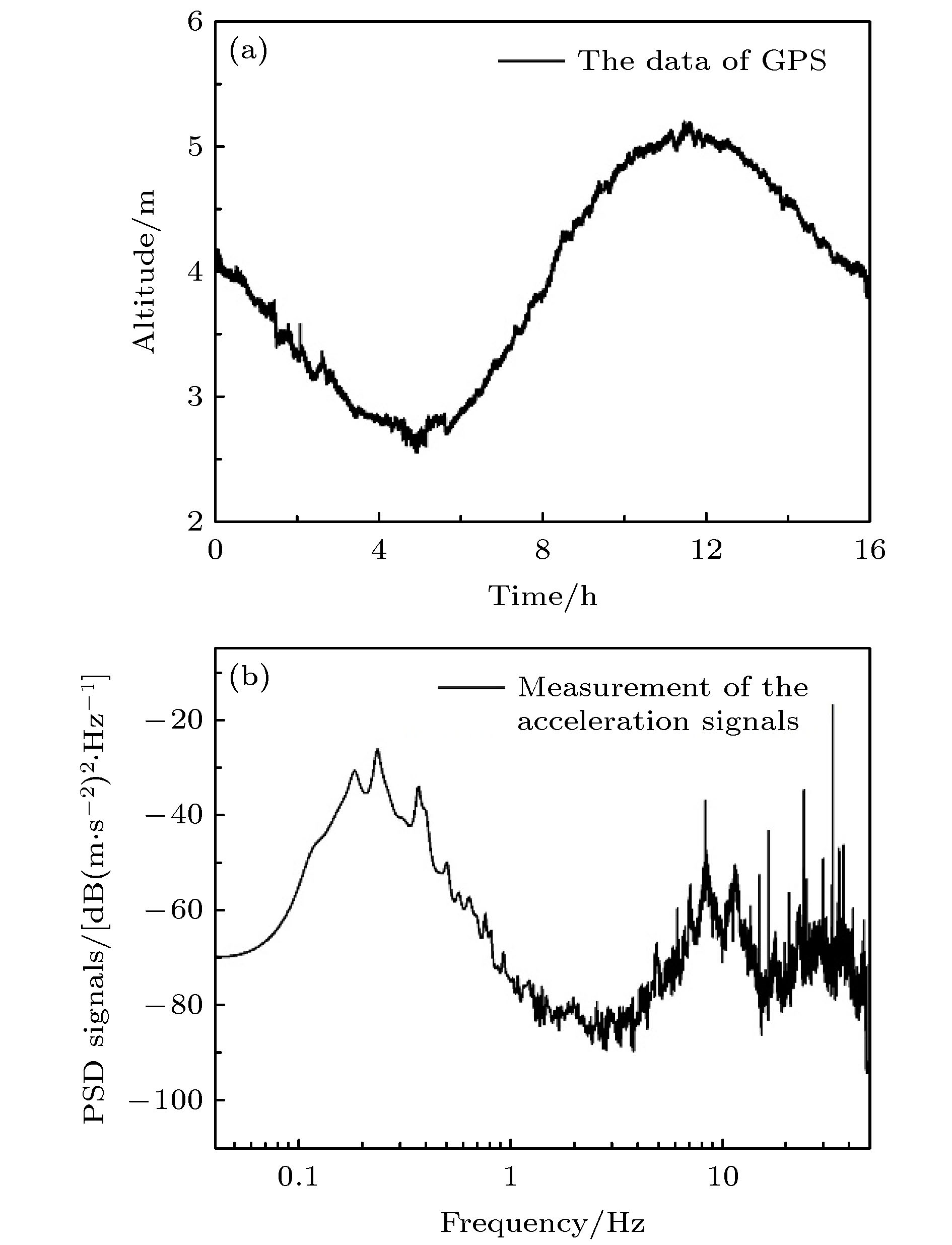 图 4 船载测量环境 (a)船体高度变化; (b)船体加速度噪声功率谱
图 4 船载测量环境 (a)船体高度变化; (b)船体加速度噪声功率谱 图 5 原子干涉条纹信号(T = 10 ms). 蓝色空心四边形: 原始原子布居数信号; 黑色空心三角形: 振动修正后信号; 红线: 拟合曲线
图 5 原子干涉条纹信号(T = 10 ms). 蓝色空心四边形: 原始原子布居数信号; 黑色空心三角形: 振动修正后信号; 红线: 拟合曲线 图 6 系泊状态下的连续重力变化数据. 灰点: 原始重力数据; 红线: 移动平均后的数据
图 6 系泊状态下的连续重力变化数据. 灰点: 原始重力数据; 红线: 移动平均后的数据 图 7 船载系泊状态下的重力测量灵敏度评估
图 7 船载系泊状态下的重力测量灵敏度评估


 图 8 绝对重力测量值的长期稳定性评估
图 8 绝对重力测量值的长期稳定性评估

