1.College of Optical and Electronic Technology, China Jiliang University, Hangzhou 310018, China 2.Key Laboratory of Zhejiang Province on Modern Measurement Technology and Instruments, Hangzhou 310018, China 3.State Key Laboratory of Precision Measurement Technology and Instruments, Tsinghua University, Beijing 100084, China
Abstract:Digital holographic microscopy (DHM) can obtain biological parameters and morphological information of cells by reconstructing holograms, which is different from traditional optical microscopy. The DHM is a three-dimensional imaging technology which is effective, non-contact and non-destructive. With the developments of the image sensor and the computing technology, it has made significant progress in the field of living cells detection, especially for red blood cell. Compared with the technologies which are widely used in the field of cell imaging such as con-focal laser scanning microscopy, scanning near-field optical microscopy and optical coherence tomography, the DHM has the advantages including wide FOV and high-resolution to achieve higher imaging and quality. This paper introduces the principle of recording and reconstruction of digital holography, and then analyzes the performance of three reconstruction algorithms using the Fresnel method, the convolution method and the angular spectrum method. The Fresnel method is suitable for the sample size larger than the image sensor. Both the convolution method and the angular spectrum method have an optimal reconstruction distance. When the reconstruction distance is different from the optimal distance, the resolution of the reconstructed image will decrease, and the angular spectrum method is better than the convolution method in overall performance. The DHM system for RBC measurements mainly adopts the convolution algorithm or the angular spectrum algorithm to implement numerical reconstruction. The systems of the in-line DHM, the off-axis DHM and the optical tweezers combining with off-axis DHM are introduced. These techniques use algorithms including Rayleigh-Sommerfeld back-propagation, the sharpness quantification, the watershed segmentation, the numerical refocusing and the thermal fluctuation to determine the focal plane position and obtain the best reconstruction distance of the RBCs, and further detect the shape change of the RBCs and extract the information of high-resolution blood vessel shape and blood flow velocity. These techniques can even achieve the dynamic tracking and measure three-dimensional volume of RBCs in real-time which is helpful for pathological studies such as diabetes, cardiovascular disease and Parkinson's disease. With its unique non-contact and non-destructive characteristics, the DHM realizes real-time and quantitative detection that is difficult to achieve with traditional three-dimensional microscopic imaging technologies. Keywords:digital holography/ microscope/ cell imaging/ digital refocusing
图 4 RBC形变与重建的复振幅实部信息之间联系的结果分析 (a)不同记录距离z下最佳反向重建距离z', 绿线代表实际实验, 红线代表模拟实验, 插图代表模拟实验所用RBC; (b)绿线代表实际实验RBC的Re(U), 红线与紫线分别代表模拟实验中初始RBC与变形后RBC的Re(U); (c)所用RBC比(b)所用小约20%, 绿线与红线分别代表实际实验与模拟实验所得Re(U)结果; (b)与(c)所用黑线表示RBC的记录距离[52] Figure4. The relationship between the RBC deformation and the real part of reconstructed amplitude. (a) The reconstruction distance z' to the focus at different recording distances z of the simulated RBC (red) and the experiment using a real RBC (green). Inset shows the Cassini model of the RBC used in the simulations; (b) the experiment using a real RBC (green), the reconstructed Re(U) for the simulated unaltered RBC and a deformed RBC represented by the red and blue curves, respectively; (c) reconstructed data from a ~20% smaller RBC compared with the one used in (b). Red and green curves represent the Re(U) of simulation and experiment, respectively; Gray vertical line in (b) and (c) indicates position of the RBC[52].
其中, $N$表示RBC的像素总数, $p$表示像素尺寸大小, $\varphi $表示RBC内每个像素对应的相位值, $M$为显微物镜的放大倍数. RBC折射率${n_{{\rm{rbc}}}} = 1.396$, HEPA介质折射率${n_{\rm{m}}} = 1.3334$. 为了研究不同形状RBC的三维体积, 在图7中选取了口腔状(stomatcyte)RBC与盘状(discocyte)RBC进行对比. 口腔状RBC与盘状RBC重建相位图像如图8(a)、8(b)所示, 通过分水岭分割算法去除相位图像背景与RBC的互相重叠部分, 对RBC进行逐一区分, 如图8(c), 8(d)所示, 可以看出口腔状RBC的重建相位图像与盘状RBC的重建相位图像中相邻细胞间均明显隔开, 能够实现单个口腔状RBC或盘状RBC的提取. 为了对RBC的三维结构进行更合理地分析, 通过标记分水岭分割算法对图8(e)所表示的单个RBC进行标记, 得到标记后的单个RBC的整体C部分, 如图8(h)所示, 经过标记分水岭分割算法计算得到单个RBC的A部分, 如图8(f)所示. 通过减法运算, 将单个RBC的整体C部分减去A部分可得到RBC的B部分, 如图8(g)所示. 图 8 RBC的相位重建图像 (a)重建的口腔形状RBC相位图像; (b)重建的盘状RBC相位图像; (c)重建后经分水岭算法分割的口腔形状RBC相位图像; (d)重建后经分水岭算法分割的盘状RBC相位图像; (e)分割的单个RBC相位图像; (f)(g)(h)分别经标记分水岭算法进一步分割得到的单个RBC的A、B、C部分[54] Figure8. The reconstructed phase image for RBCs (a) The reconstructed phase image for RBCs having a stomatocyte shape; (b) the reconstructed RBCs phase image for RBCs having a discocyte shape; (c)the segmented phase image for RBCs having a stomatocyte shape; (d) the segmented phase image for RBCs having a discocyte shape; (e) the segmented phase image for single RBC(f), (g) and (h) represent the A, B and C parts by the marker-controlled watershed algorithm in RBC, respectively[54].
表3人工聚焦方法与数字重聚焦方法测得微球光学体积对比[53] Table3.Comparison of OV measured by manually-focused and digitally-refocused methods[53].
为显示生物样品中光学体积测量中散焦的影响, 选取单一RBC作为测试样品, 在约200 μm范围人工选取7个不同焦平面, 分别对RBC进行重建得到相对应的振幅图与相位图, 如图10(a)中首行与中间行(A—G)所示. 图 10 对单一RBC图像进行数字重聚焦与相应的RBC光学体积测量 (a)通过人工聚焦方法与数字重聚焦方法对单一RBC重建所得振幅图与相位图; (b)A—G的振幅方差分布; (c)RBC在人工聚焦方法所得光学体积(黑线)与数字重聚焦方法所得光学体积(蓝线), 光学体积OV表示为平均值 ± 标准差[53] Figure10. Digital refocusing of a single red blood cell image and corresponding optical volume measurements. (a) The amplitude and phase images by the manually-focused method and digitally-refocused method from a single RBC; (b) amplitude variance metric of holograms A-G; (c) computed OV of RBC from manually-focused phase images(black) and digitally-refocused phase images(blue). OV reported as mean ± standard deviation[53].
其中, $\lambda $代表全息显微系统中的激光波长(632.8 nm), $\varphi $代表相位值, RBC的折射率$n_{\rm{cell}}=1.37$, 溶液的折射率${n_{{\rm{medium}}}} = 1.34$, $V$表示RBC的体积, $h\left( {{x_i}, {y_j}} \right)$表示RBC上任意点的$\left( {{x_i}, {y_j}} \right)$的高度, $M$和$N$表示RBC的横向坐标范围. 将过氧化氢(H2O2)溶液(0.1 mol/L)在PBS中稀释至50、100、150和200 μmol/L对照组, 置于5个培养皿中, 与符合实验条件附着有微球的RBC样品进行混合. 为具体分析陷阱的拉伸力与细胞变形之间的关系, 需对光阱刚度值进行校准, 校准分为已知力校准方法和热涨落方法[73,74]. 热涨落是系统在平衡状态下相对于其平均状态的随机偏差, 是系统温度的基本体现, 根据Boltzmann统计分析热噪声下随机运动粒子的布朗轨迹, 可以获得粒子位移概率分布图, 接着通过计算粒子的电势获得光阱刚度$k$, 该值被校准为14.23 ± 0.46 pN/μm. 校准后保持激光功率不变以确保光阱强度均匀. 光阱拉伸力$F$由光阱刚度$k$和微球与陷阱之间中心差$\Delta x$共同确定, 控制陷阱拉伸力在0~3 pN之间变化. 将RBC所能达到的最大高度值定义为$H$, 同时为了清楚观察$H$的变化, 在图12中分别显示了$H$大于2 μm的高度部分, 随着氧化应激浓度的增大, RBC的细胞膜出现粗糙度且其边缘呈现锯齿状. 分别计算五项氧化应激浓度下测量所得10个RBC的最大高度与三维体积的平均值, 能够更直观比较RBC在不同浓度氧化应激下高度与三维体积的变化, 绘制的相关折线图如图13所示, H/H0表示拉伸过程中细胞的最大高度$H$与未拉伸前RBC的原始高度${H_0}$的比值, 图13(a)表示0—200 μmol/L氧化应激浓度下RBC高度比$H/{H_0}$与陷阱拉伸力的关系, 反映了RBC的微形变机械性能, 由图可知, 随着氧化应激浓度的增加, RBC的变形能力下降, 因此氧化应激下的RBC其机械性能会受到严重影响. 图13(b)表示0—200 μmol/L氧化应激浓度下RBC三维体积的变化, 由图可知, 对比不加入H2O2的常规PBS中的RBC, 氧化应激使RBC的体积减小, 在50—200 μmol/L的H2O2浓度下, RBC的体积变为初始体积的90%—87.3%, 该结果与过往研究相一致[75]. 综上所述, 在氧化应激下RBC的机械性能会发生变化, 微形变能力下降, 而氧化应激是导致PD的主要因素, 该光镊辅助离轴数字全息显微成像的技术将助于PD的基础研究与临床应用. 图 12 0?3 pN陷阱拉伸力变化下不同浓度(0?200 μmol/L)氧化应激下重建RBC的高度变化, 颜色深浅代表RBC高度的大小[72] Figure12. Height change of reconstructed RBCs under different concentrations of oxidative stress (0?200 μmol/L). Four images in each group are corresponding to trap force varying from 0?3 pN. Color bar represents different thickness[72].
图 13 RBC在不同浓度氧化应激下的性能 (a)不同浓度氧化应激下RBC最大高度H与陷阱拉伸力关系; (b)不同浓度氧化应激下RBC体积[72] Figure13. Performance of RBC under different oxidative stress. (a) The relationship between the maximum height H of RBC and the trap tensile force under different oxidative stress; (b) the volume of RBC under different oxidative stress[72].









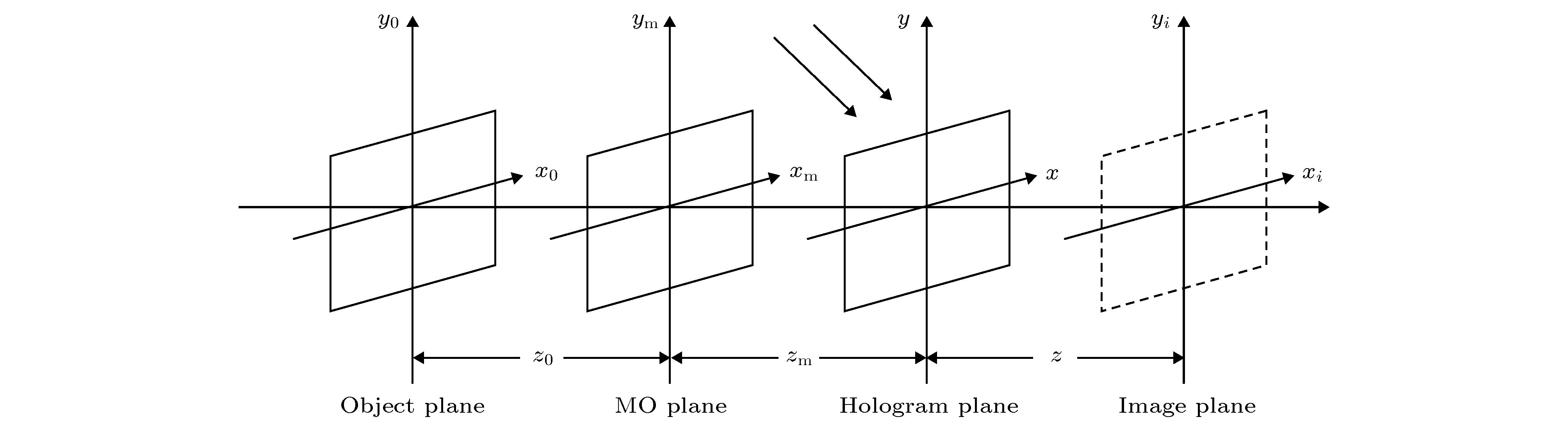 图 1 数字全息原理示意图
图 1 数字全息原理示意图































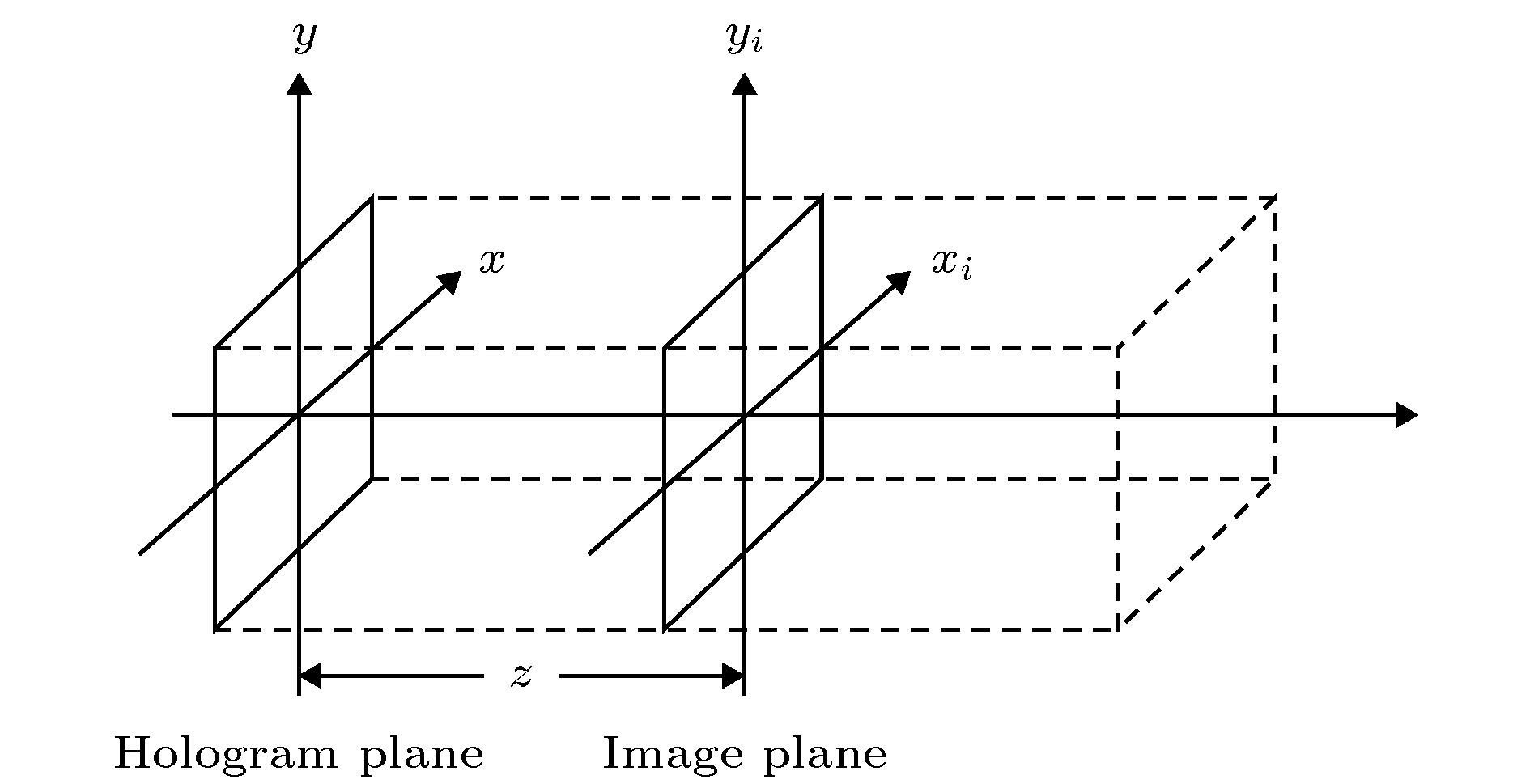 图 2 数字全息显微重建原理图
图 2 数字全息显微重建原理图






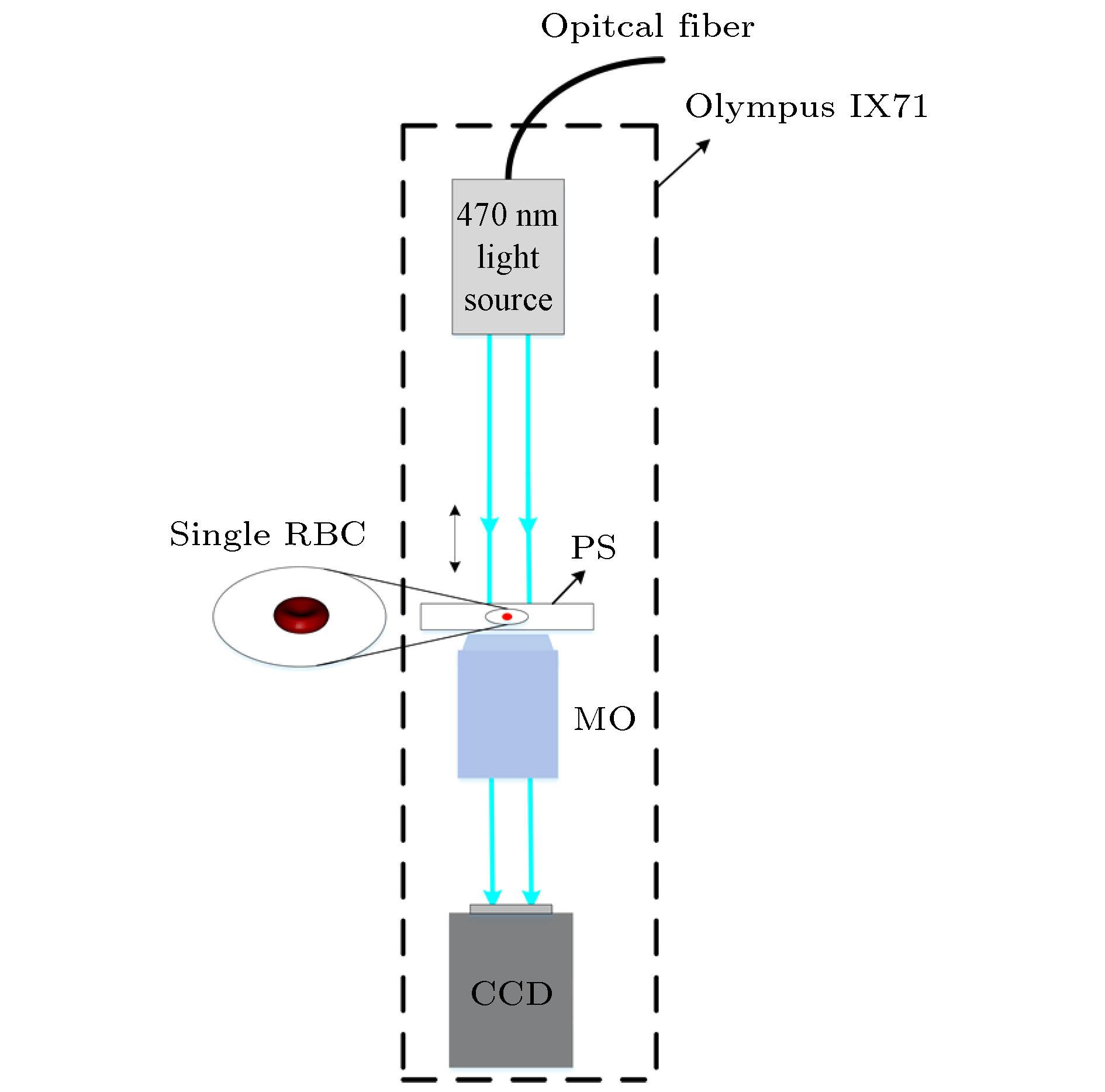 图 3 同轴数字全息显微成像系统检测血红细胞形变[52]
图 3 同轴数字全息显微成像系统检测血红细胞形变[52]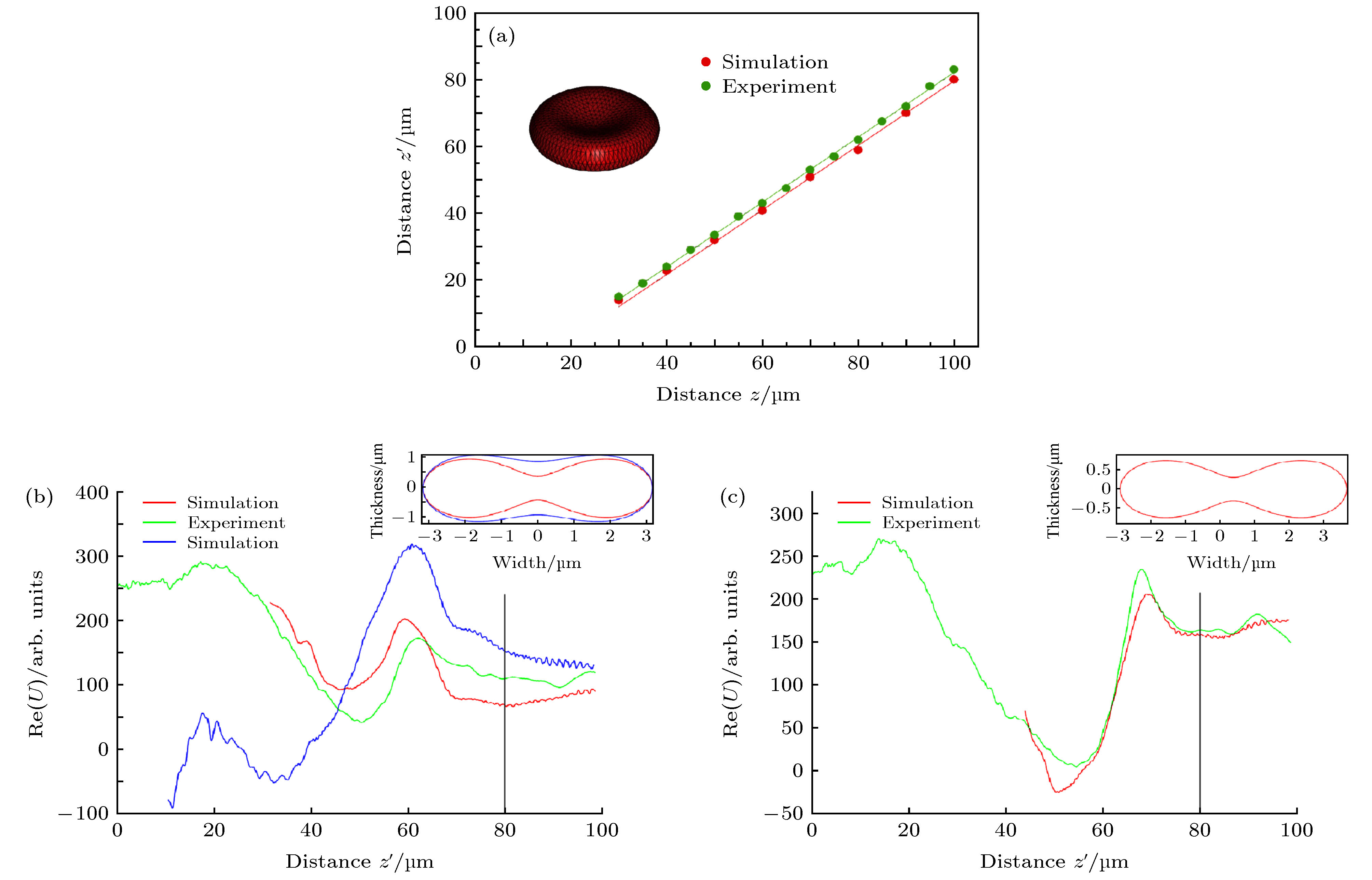 图 4 RBC形变与重建的复振幅实部信息之间联系的结果分析 (a)不同记录距离z下最佳反向重建距离z', 绿线代表实际实验, 红线代表模拟实验, 插图代表模拟实验所用RBC; (b)绿线代表实际实验RBC的Re(U), 红线与紫线分别代表模拟实验中初始RBC与变形后RBC的Re(U); (c)所用RBC比(b)所用小约20%, 绿线与红线分别代表实际实验与模拟实验所得Re(U)结果; (b)与(c)所用黑线表示RBC的记录距离[52]
图 4 RBC形变与重建的复振幅实部信息之间联系的结果分析 (a)不同记录距离z下最佳反向重建距离z', 绿线代表实际实验, 红线代表模拟实验, 插图代表模拟实验所用RBC; (b)绿线代表实际实验RBC的Re(U), 红线与紫线分别代表模拟实验中初始RBC与变形后RBC的Re(U); (c)所用RBC比(b)所用小约20%, 绿线与红线分别代表实际实验与模拟实验所得Re(U)结果; (b)与(c)所用黑线表示RBC的记录距离[52]














 图 5 同轴数字全息显微成像系统追踪红细胞空间分布[51]
图 5 同轴数字全息显微成像系统追踪红细胞空间分布[51]




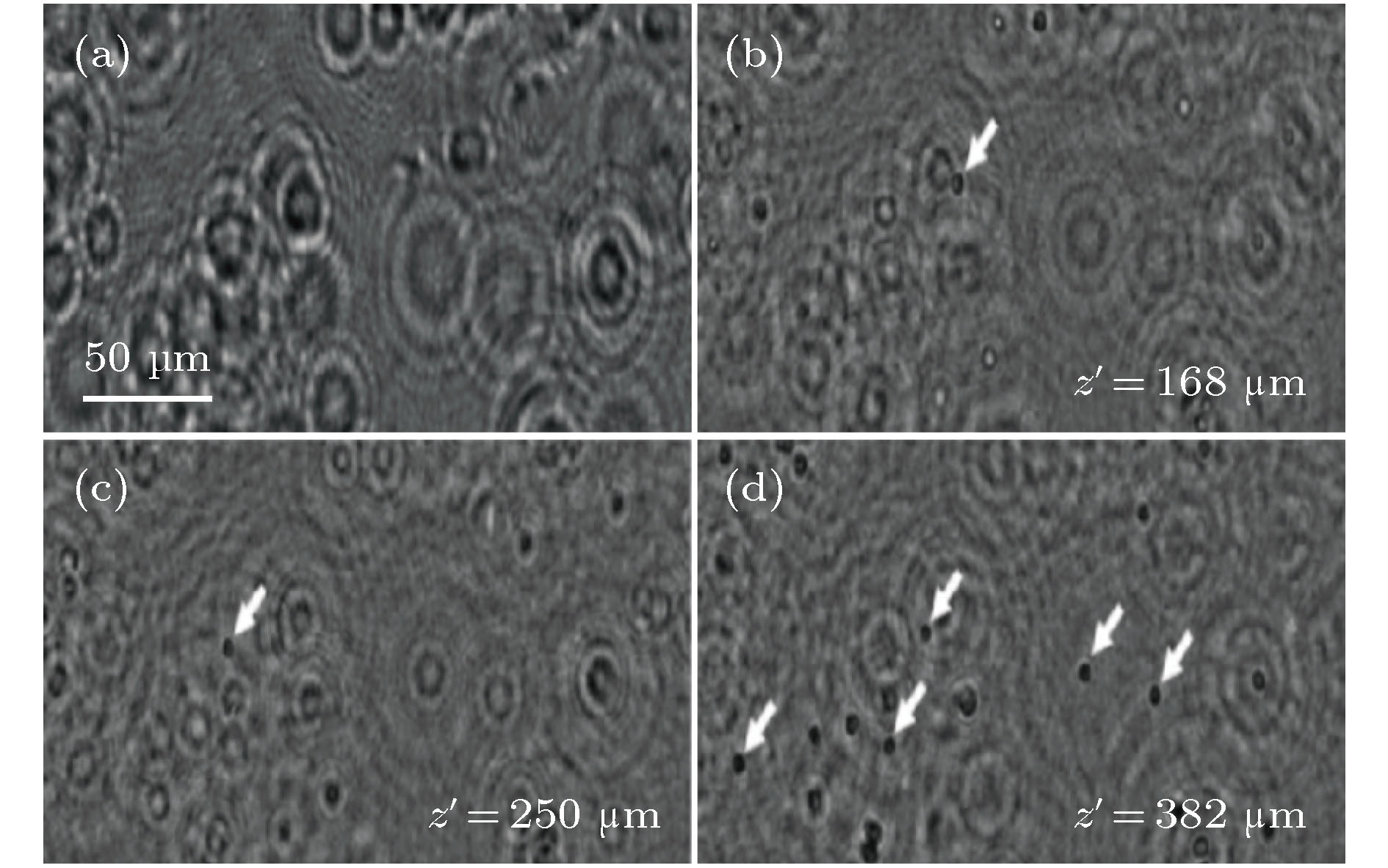 图 6 RBC的全息图与重建图像 (a) CMOS像感器拍摄FEP微管内RBC所得全息图; (b), (c), (d)分别表示不同重建深度下RBC重建图像, 箭头表示聚焦的RBC[51]
图 6 RBC的全息图与重建图像 (a) CMOS像感器拍摄FEP微管内RBC所得全息图; (b), (c), (d)分别表示不同重建深度下RBC重建图像, 箭头表示聚焦的RBC[51] 图 7 离轴数字全息显微成像系统测量不同形状RBC三维体积[54]
图 7 离轴数字全息显微成像系统测量不同形状RBC三维体积[54]





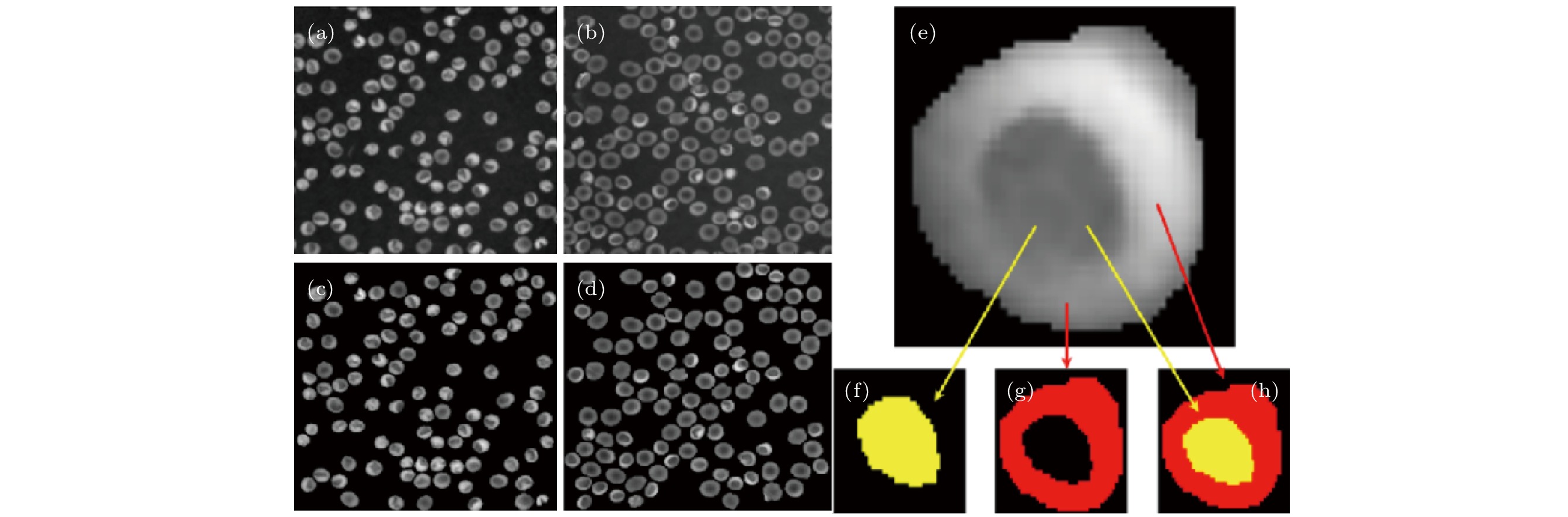 图 8 RBC的相位重建图像 (a)重建的口腔形状RBC相位图像; (b)重建的盘状RBC相位图像; (c)重建后经分水岭算法分割的口腔形状RBC相位图像; (d)重建后经分水岭算法分割的盘状RBC相位图像; (e)分割的单个RBC相位图像; (f)(g)(h)分别经标记分水岭算法进一步分割得到的单个RBC的A、B、C部分[54]
图 8 RBC的相位重建图像 (a)重建的口腔形状RBC相位图像; (b)重建的盘状RBC相位图像; (c)重建后经分水岭算法分割的口腔形状RBC相位图像; (d)重建后经分水岭算法分割的盘状RBC相位图像; (e)分割的单个RBC相位图像; (f)(g)(h)分别经标记分水岭算法进一步分割得到的单个RBC的A、B、C部分[54]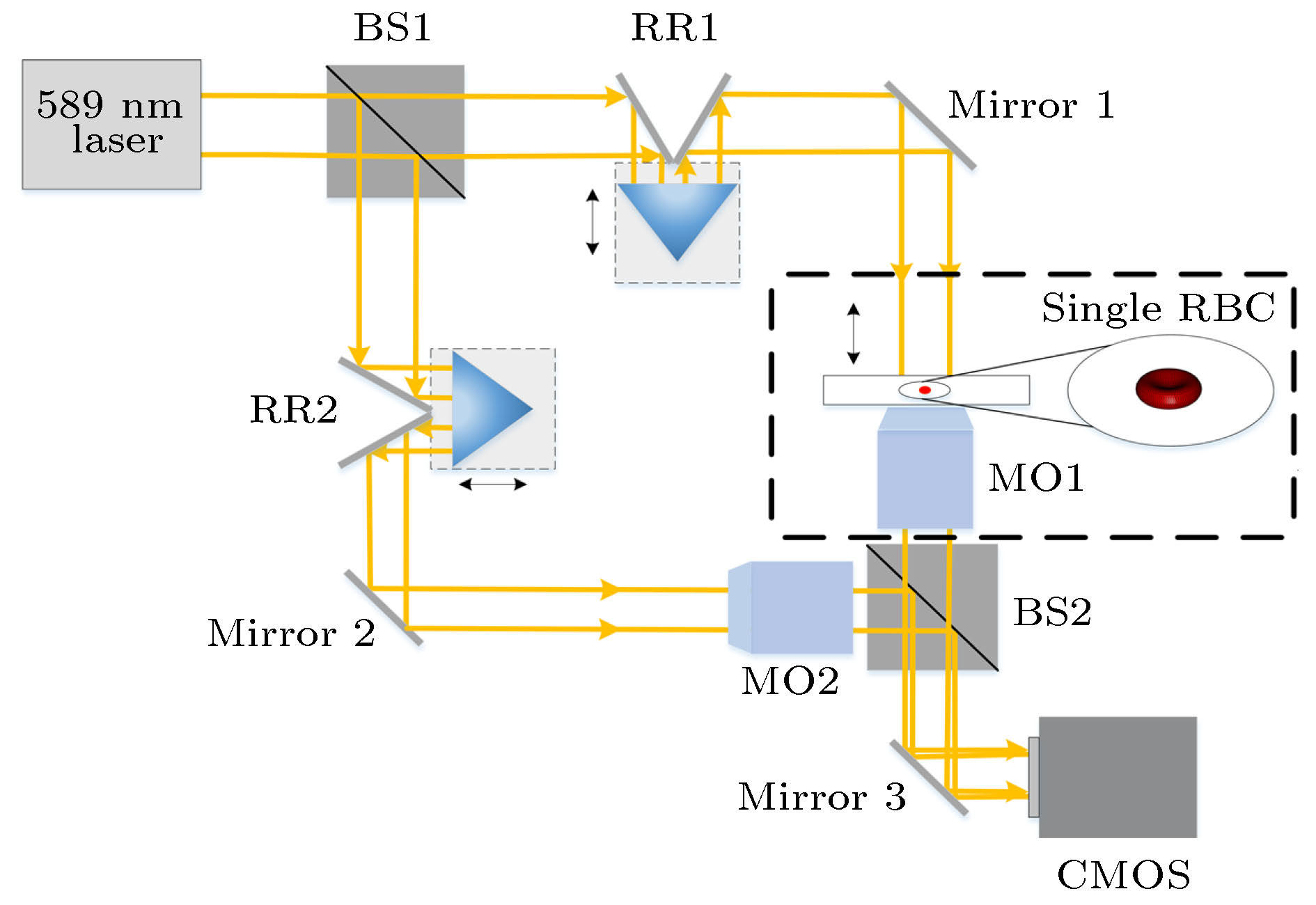 图 9 离轴数字全息显微系统研究散焦现象对RBC三维体积测量影响[53]
图 9 离轴数字全息显微系统研究散焦现象对RBC三维体积测量影响[53]









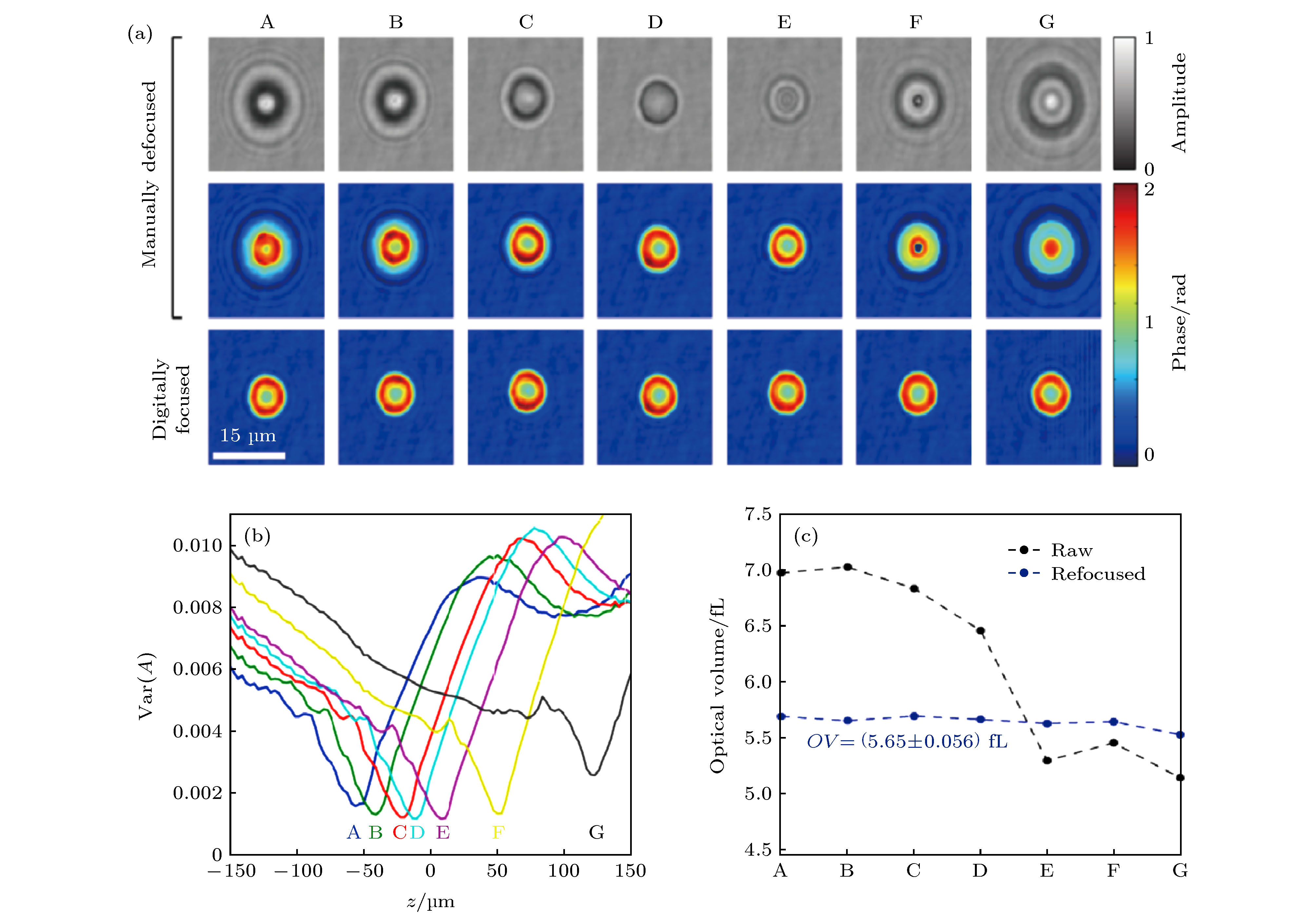 图 10 对单一RBC图像进行数字重聚焦与相应的RBC光学体积测量 (a)通过人工聚焦方法与数字重聚焦方法对单一RBC重建所得振幅图与相位图; (b)A—G的振幅方差分布; (c)RBC在人工聚焦方法所得光学体积(黑线)与数字重聚焦方法所得光学体积(蓝线), 光学体积OV表示为平均值 ± 标准差[53]
图 10 对单一RBC图像进行数字重聚焦与相应的RBC光学体积测量 (a)通过人工聚焦方法与数字重聚焦方法对单一RBC重建所得振幅图与相位图; (b)A—G的振幅方差分布; (c)RBC在人工聚焦方法所得光学体积(黑线)与数字重聚焦方法所得光学体积(蓝线), 光学体积OV表示为平均值 ± 标准差[53]


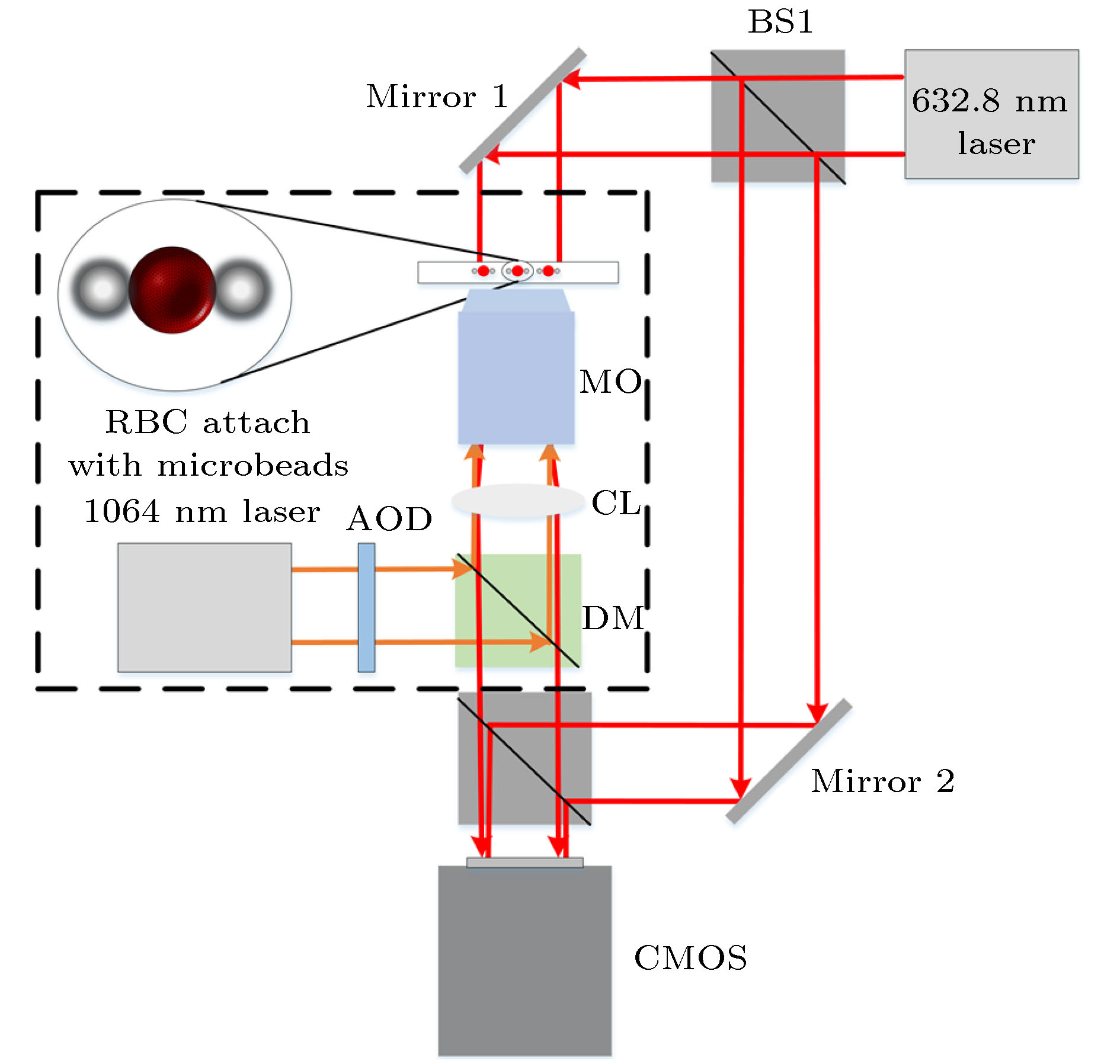 图 11 光镊辅助离轴数字全息显微系统测量RBC体积[72]
图 11 光镊辅助离轴数字全息显微系统测量RBC体积[72]


















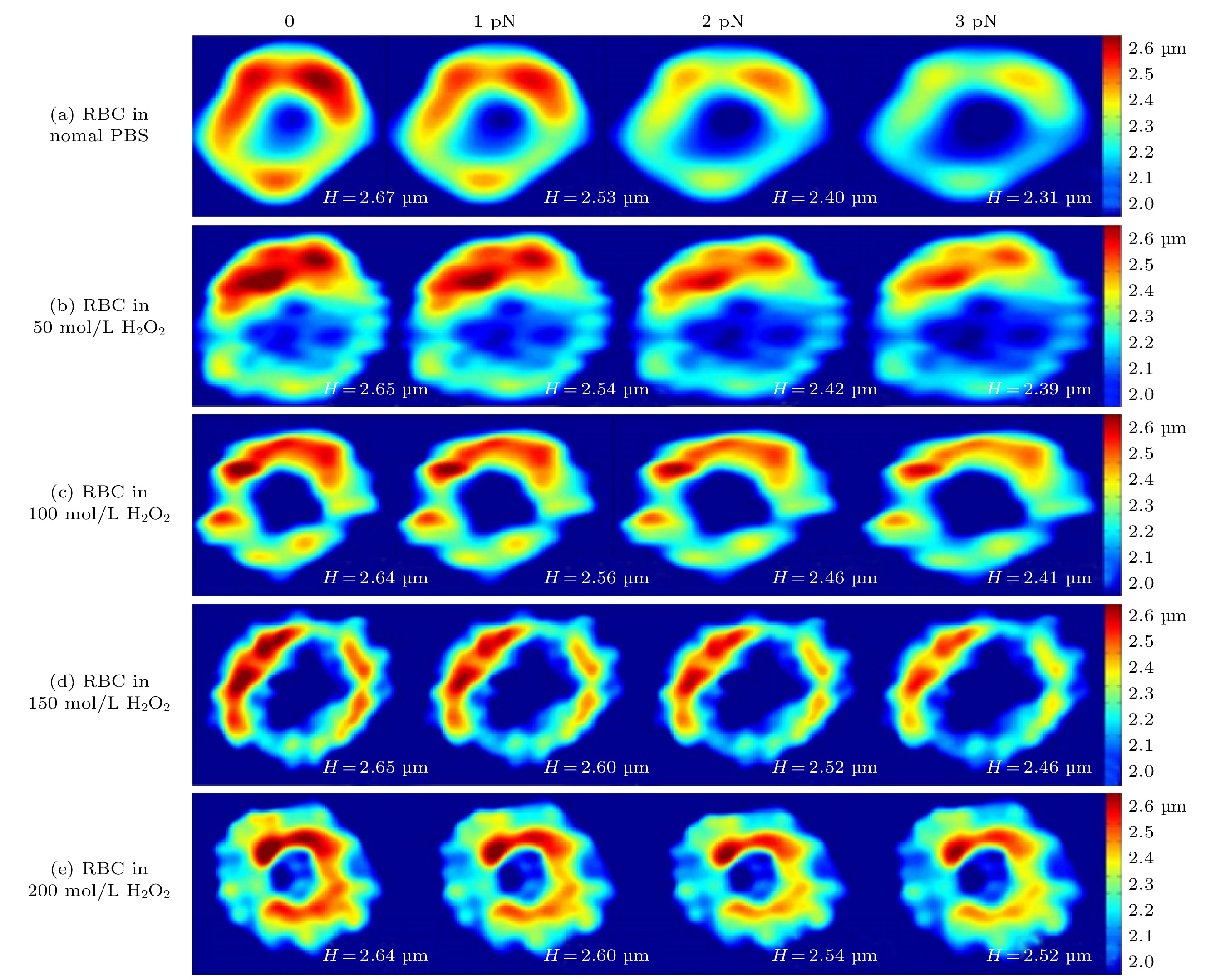 图 12 0?3 pN陷阱拉伸力变化下不同浓度(0?200 μmol/L)氧化应激下重建RBC的高度变化, 颜色深浅代表RBC高度的大小[72]
图 12 0?3 pN陷阱拉伸力变化下不同浓度(0?200 μmol/L)氧化应激下重建RBC的高度变化, 颜色深浅代表RBC高度的大小[72]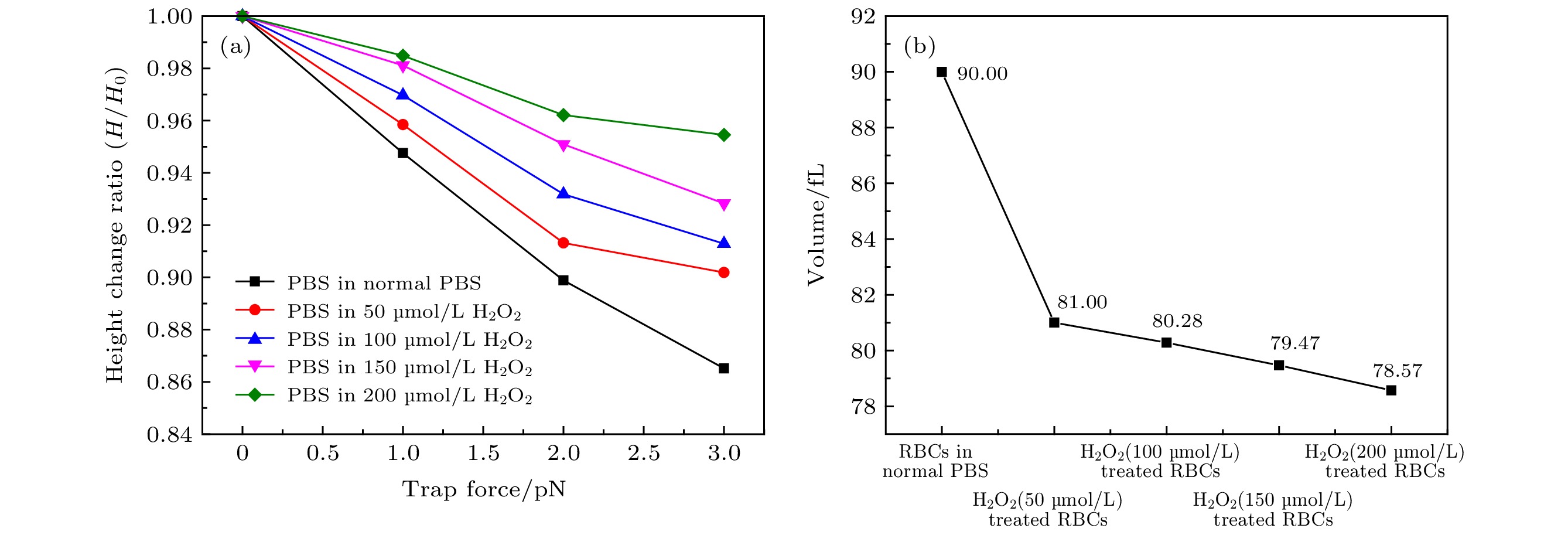 图 13 RBC在不同浓度氧化应激下的性能 (a)不同浓度氧化应激下RBC最大高度H与陷阱拉伸力关系; (b)不同浓度氧化应激下RBC体积[72]
图 13 RBC在不同浓度氧化应激下的性能 (a)不同浓度氧化应激下RBC最大高度H与陷阱拉伸力关系; (b)不同浓度氧化应激下RBC体积[72]