Abstract:Entropy is one of the parameters describing the state of matter in thermodynamics, it can be used to measure the degree of confusion. The entropy of the signal can be used to express the complexity of the signal. The threshold for the transition of the Duffing chaotic system from the critical chaotic state to the large-scale periodic state is called the transition threshold. It is an important parameter for the analysis of chaotic systems, and its solution method is one of the problems urgently to be solved in chaos theory. If the jump threshold is smaller than the real threshold of the system, it will affect its detection signal-to-noise ratio. If the jump threshold is larger than the real threshold, it will cause incorrect detection results, so it is very important to accurately determine the jump threshold. In this study, we found that the multiscale sample entropy value of the Duffing system is significantly different when the system is in the chaotic state and the periodic state, when the system is in a chaotic state, the entropy value is larger, when the system is in a periodic state, the entropy value is smaller, and when the system enters the periodic state, the multiscale entropy value tends to be stable, this paper proposes to use this phenomenon to determine the transition threshold by analyzing the relationship between the entropy of the system and the amplitude of the driving force. When the entropy value is obviously smaller and tends to be stable, the corresponding driving force amplitude is the jump threshold. using this method, the jump threshold of the sinusoidal signal and square wave signal detection system is calculated, the results show that the method is fast, accurate and simple to calculate. However, this method may have a problem that the calculated threshold value is smaller than the real threshold value, our analysis is that the random selection of the subsequence used for calculation causes the calculation threshold value to be too small, so the method is improved in conjunction with genetic algorithm, using genetic algorithm to find the most complicated subsequence in the whole sequence, then this subsequence is used to solve the threshold, Through a large number of calculations and analysis, it can be seen that the problem of a small threshold is no longer present, and the improved method can obtain the jump threshold of the Duffing system very accurately. Keywords:weak signal detection/ Duffing system/ multi-scale sample entropy/ genetic algorithm
$\left\{ \begin{aligned}&\dot x = w \times y,\\&\dot y = w \!\times\! [ - ky \!+\! x - {x^3} \!+\! (r \!+\! h)\cos (wt) \!+\! z],\end{aligned} \right.$
其中k是阻尼比; $ x \!-\! {x^3} $是非线性恢复力; $r\cos (wt)$是周期性策动力, r是策动力幅值, h是目标信号的幅值, w是待测信号的频率, z为白噪声. 调节策动力幅值使r从0逐渐增大, 系统将会遍历同宿轨道状态、分叉状态、混沌状态、临界混沌状态, 当r大于某一值${r_{\rm{d}}}$时, 系统由临界混沌状态进入大尺度周期状态, 相轨迹图将发生明显的变化, 如图1所示, 其中${r_{\rm{d}}}$便是本文所要求解的混沌系统跃变阈值. 使用Duffing混沌系统检测微弱信号正是基于这一跃变现象: 将系统的策动力幅值r调为${r_{\rm{d}}}$, 再将待测信号添加到系统, 观察待测信号添加前后系统的相轨迹是否发生跃变, 如果发生了跃变则说明待测信号中有目标信号的存在. 可知利用这一现象检测微弱信号时, 跃变阈值的确定非常关键, 跃变阈值选取过小, 将会严重影响到系统的检测信噪比; 跃变阈值选取过大, 会导致系统状态发生跃变, 造成对检测结果的误判. 图 1 系统状态跃变 (a) 临界混沌状态; (b) 周期状态 Figure1. System state transition: (a) System state transition; (b) periodic state.
图 7 真实水声信号频谱 Figure7. Spectrum of real underwater acoustic signals.
图 8 真实信号检测系统多尺度熵值变化情况 Figure8. Changes in multi-scale entropy of real signal detection system.
图 9 仿真实验求解真实水声信号检测系统阈值 Figure9. Simulation experiment to solve the threshold of real underwater acoustic signal detection system.
将策动力幅值r调节至0.825, 也即使系统处于临界混沌状态, 将真实水声信号加入检测系统, 系统相轨迹图由图10(a)所示混沌状态跃变至图10(b)所示周期状态, 成功实现对实测水声信号中目标信号的检测. 所以多尺度熵方法可以很准确地计算系统阈值. 图 10 对真实水声信号的检测 (a) 系统未添加真实信号; (b)系统添加真实信号 Figure10. Detecting real underwater acoustic signals: (a) The system did not add a real signal; (b) system adds real signal
4.最大多尺度熵算法利用系统(1)将频率参数改为5 rad/s, 其他参数不变, 得到多尺度熵变化情况如图11所示, 分析可知多尺度熵方法求得系统阈值为${r_{\rm{d}}} = 0.825$. 进行仿真实验, 仿真结果如图12所示, 可知仿真实验求得的系统阈值为${r_{\rm{d}}} = 0.826$, 与多尺度熵方法求解结果有偏差, 说明多尺度熵方法存在一定问题. 图 11 5 rad/s正弦信号检测系统多尺度熵变化情况 Figure11. Variation of multi-scale entropy in 5 rad/s sinusoidal signal detection system.
图 12 仿真实验求解5 rad/s正弦信号检测系统跃变阈值 Figure12. Simulation experiment to solve the threshold of 5 rad/s sinusoidal signal detection system.
我们分析是时间序列段的随机选取造成了阈值计算的偏差, 第三部分中计算采用的时间序列是在整个Duffing序列中随机选取的长度为30000的子序列段, 在一般状态下随机选取的子序列段可以代表整个时间序列的复杂度, 但是当系统在接近或处于临界混沌状态时会有部分序列段已经处于周期状态, 如图13所示, 该状态下随机选取的时间序列段不能代表整个时间序列的状态. 图 13 系统临界混沌状态 Figure13. Critical chaotic state of the system.





 图 1 系统状态跃变 (a) 临界混沌状态; (b) 周期状态
图 1 系统状态跃变 (a) 临界混沌状态; (b) 周期状态


































 图 2 方波信号检测系统多尺度熵变化情况
图 2 方波信号检测系统多尺度熵变化情况 图 3 仿真实验求解方波信号检测系统阈值
图 3 仿真实验求解方波信号检测系统阈值




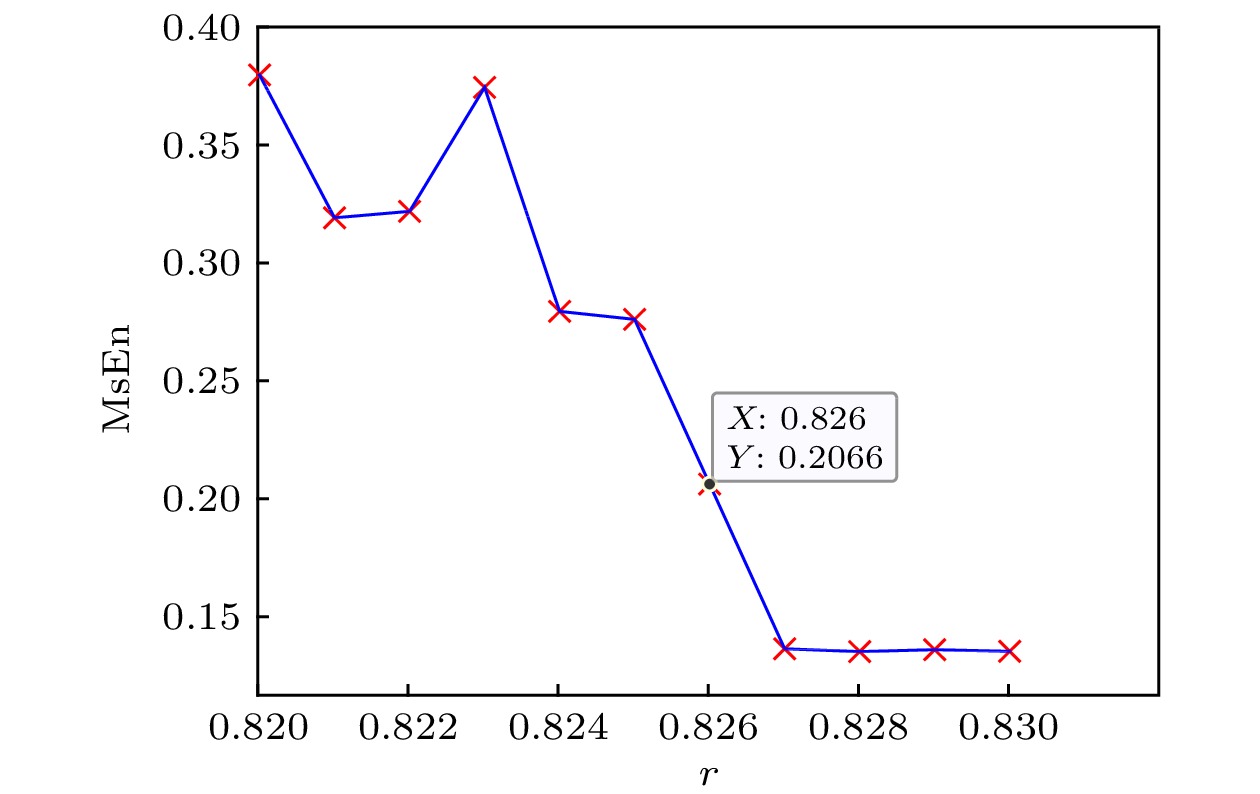 图 4 正弦信号检测系统多尺度熵变化情况
图 4 正弦信号检测系统多尺度熵变化情况 图 5 仿真实验求解正弦信号检测系统阈值
图 5 仿真实验求解正弦信号检测系统阈值

 图 6 真实水声信号
图 6 真实水声信号 图 7 真实水声信号频谱
图 7 真实水声信号频谱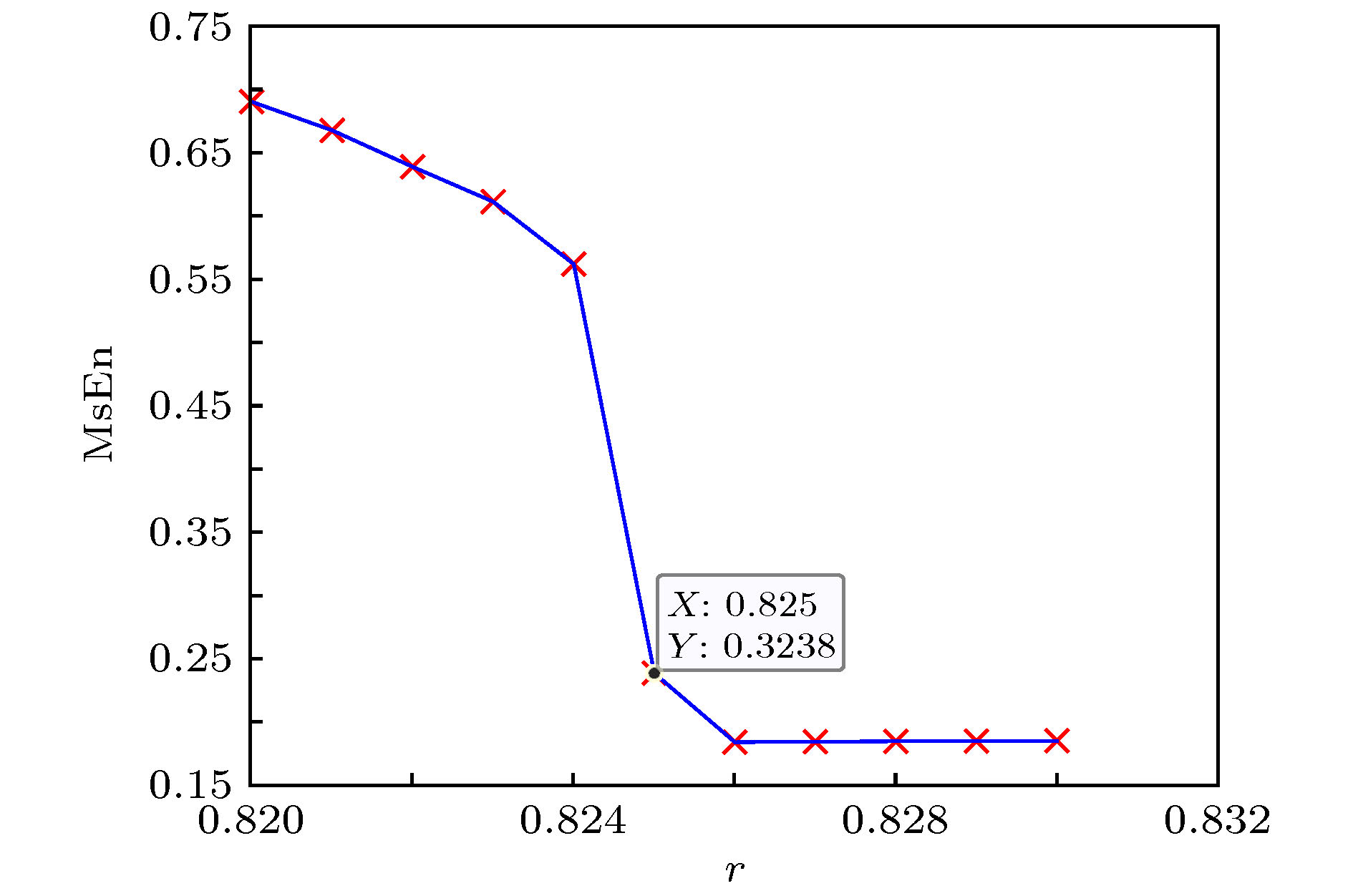 图 8 真实信号检测系统多尺度熵值变化情况
图 8 真实信号检测系统多尺度熵值变化情况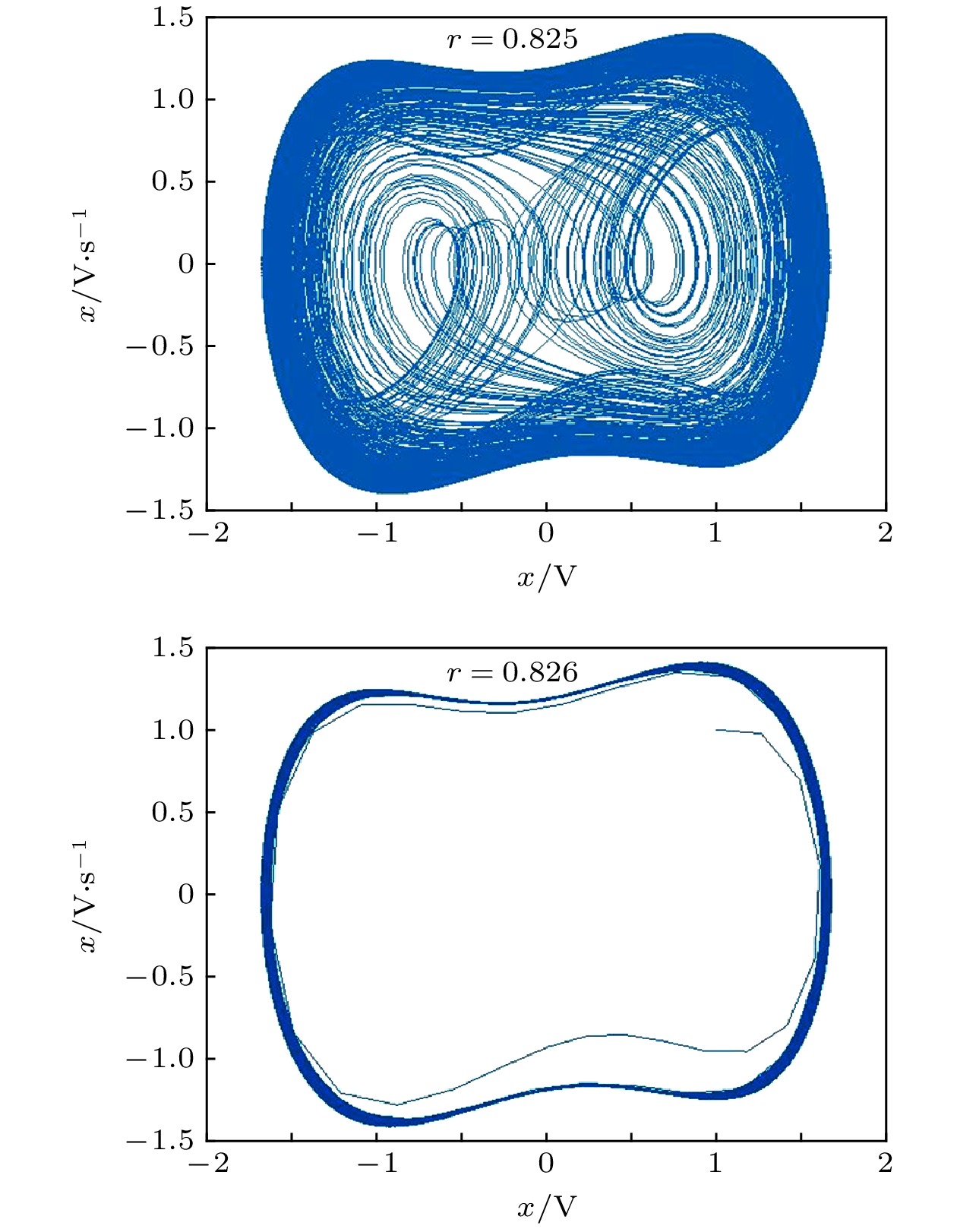 图 9 仿真实验求解真实水声信号检测系统阈值
图 9 仿真实验求解真实水声信号检测系统阈值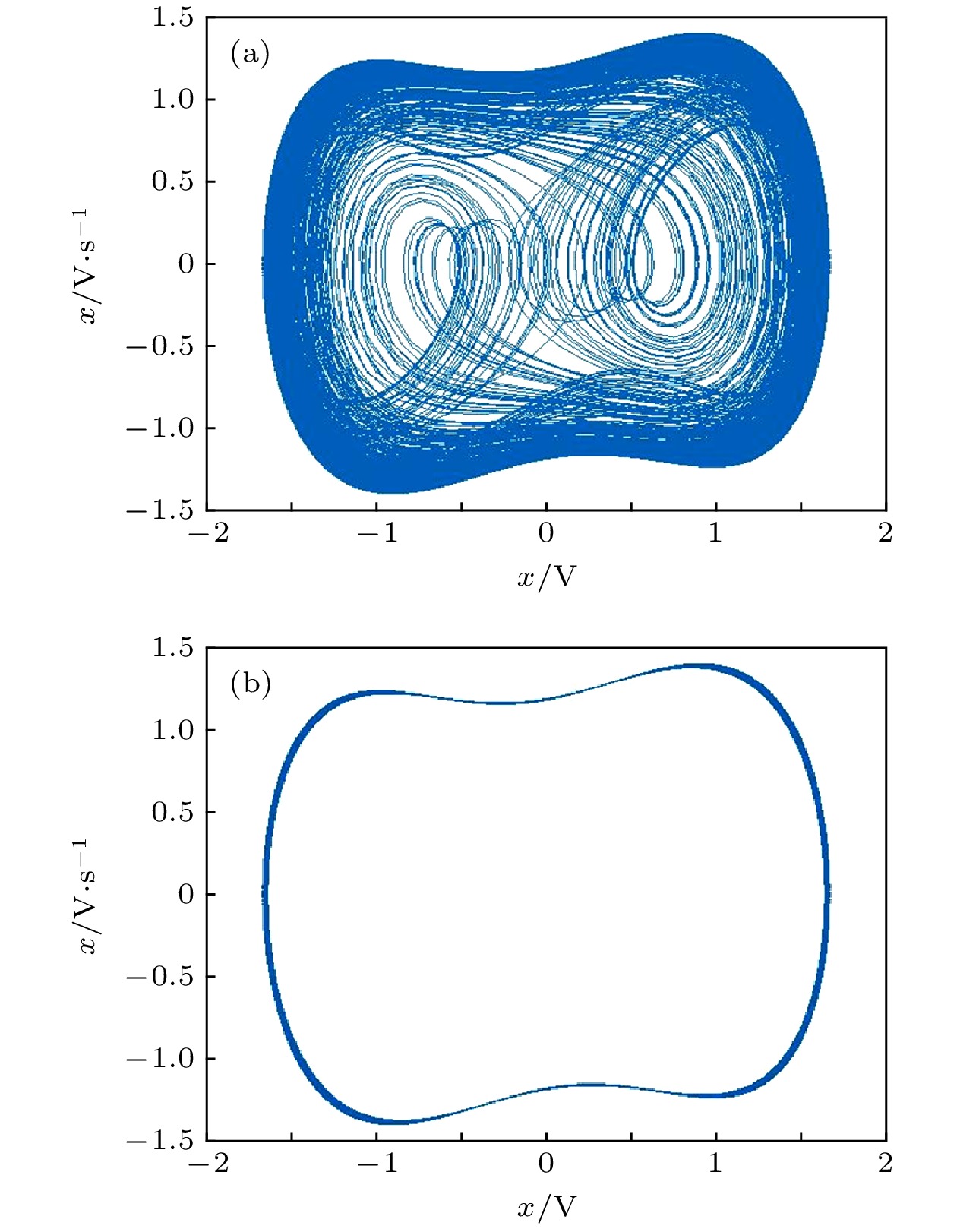 图 10 对真实水声信号的检测 (a) 系统未添加真实信号; (b)系统添加真实信号
图 10 对真实水声信号的检测 (a) 系统未添加真实信号; (b)系统添加真实信号

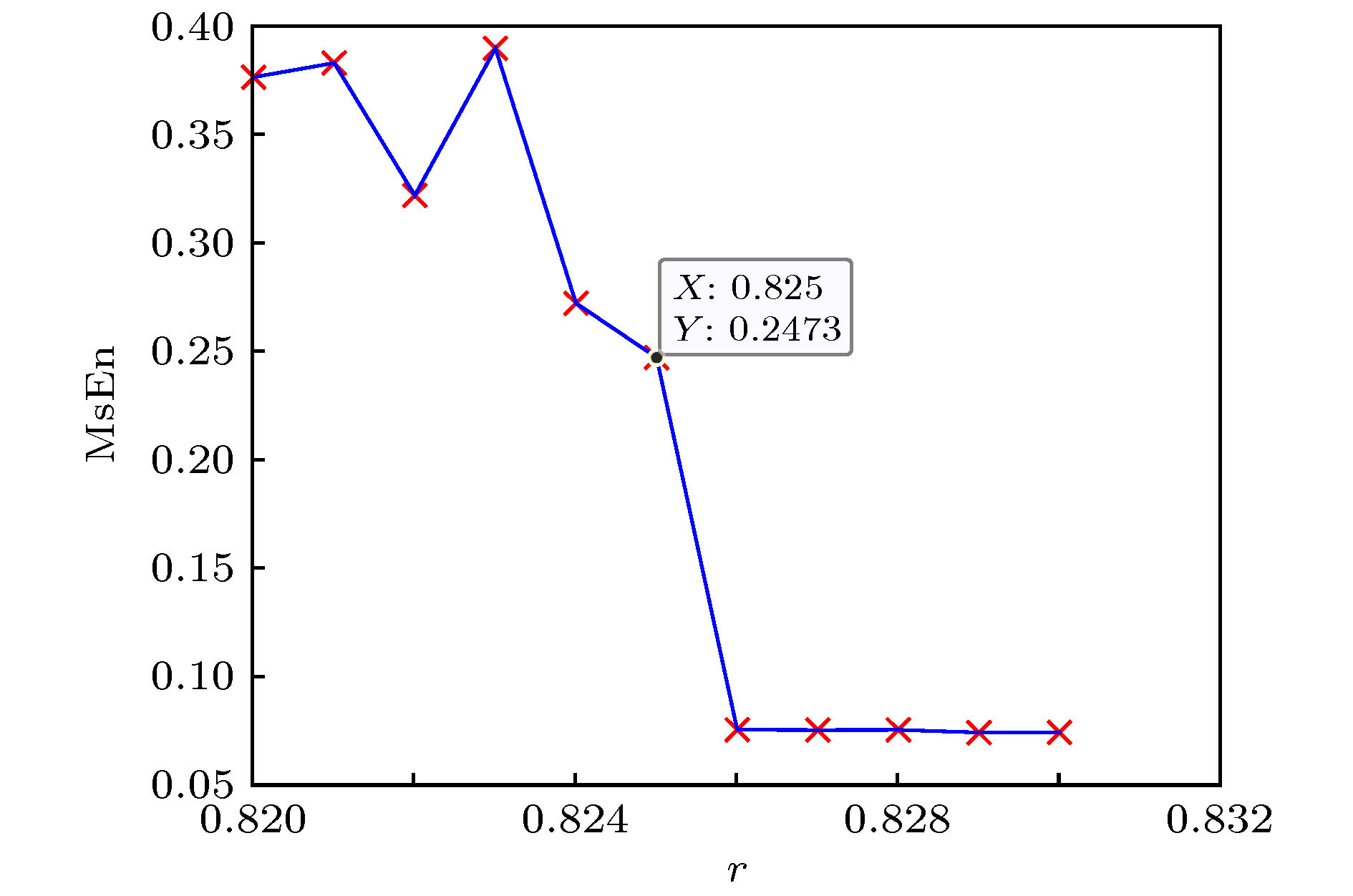 图 11 5 rad/s正弦信号检测系统多尺度熵变化情况
图 11 5 rad/s正弦信号检测系统多尺度熵变化情况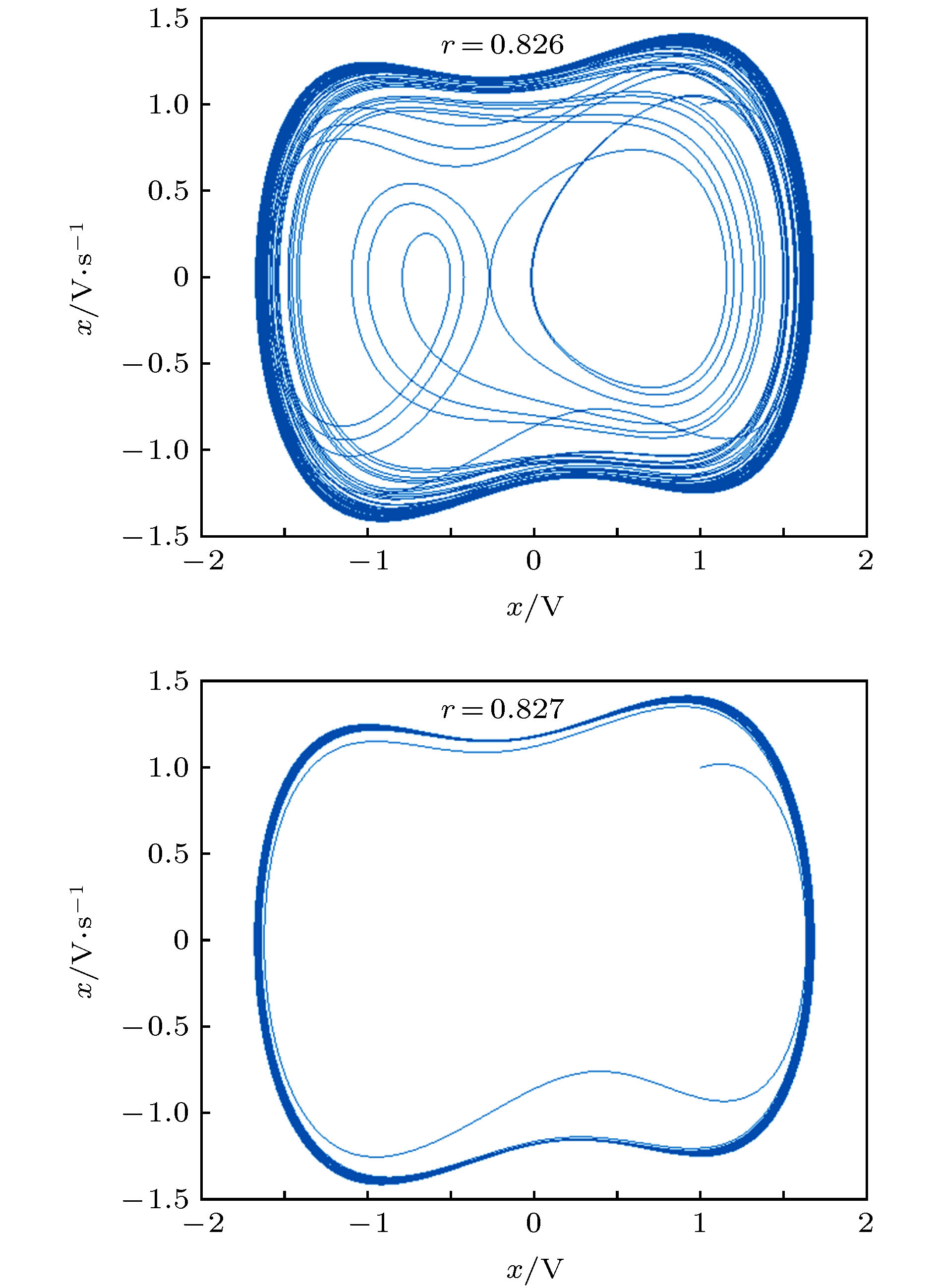 图 12 仿真实验求解5 rad/s正弦信号检测系统跃变阈值
图 12 仿真实验求解5 rad/s正弦信号检测系统跃变阈值 图 13 系统临界混沌状态
图 13 系统临界混沌状态























 图 14 5 rad/s正弦信号检测系统最大多尺度熵变化情况
图 14 5 rad/s正弦信号检测系统最大多尺度熵变化情况