全文HTML
--> --> -->Wang等[7—9]提出了微球超分辨成像技术, 借助直径微米级的透明电介质微球, 利用微球对入射光的亚波长聚焦特性, 传统光学显微镜可以在白光下实现50 nm分辨率的成像, 如图1(a)所示, 为实现超分辨成像提供了一种全新的方法. 2013年, Li等[10]将微球浸没水中, 实现了对75 nm腺病毒的白光成像; Hao等[11,12]和Darafsheh等[13-15]直接将微球半浸没或全浸没在酒精或异丙醇等介质中, 但是这些方式只能对样品进行一次性观察, 同时浸没介质的易挥发性严重影响观察的稳定性; 随后, Darafsheh等[16,17]改进微球使用方法, 利用硅胶将钛酸钡微球封装成硅胶薄膜, 但硅胶薄膜与样品的粘黏作用不可避免会损坏样品表面. 在这些使用方式中, 微球相对样品固定, 并随机分布在被观测样品表面, 这些使用方式导致了微球位置的随机性和不连续性, 无法实现特定区域的完整成像, 而且待测样品被微球及浸没介质污染, 极大限制了该技术的使用范围.
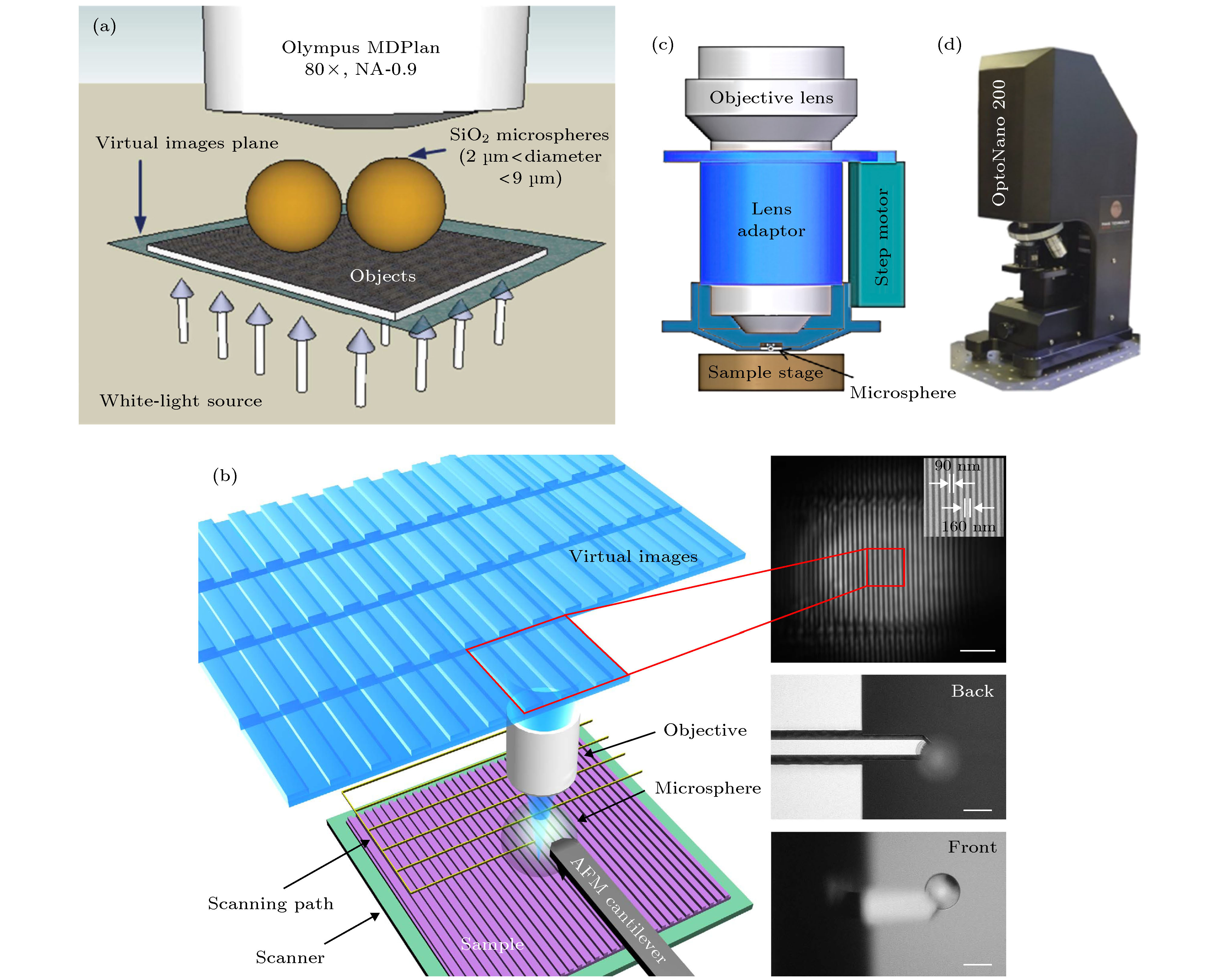 图 1 (a)直接播撒微球成像示意图; (b)AFM探针操控微球成像示意图; (c)微球通用镜头适配器; (d)微球辅助显微镜OptoNano 200
图 1 (a)直接播撒微球成像示意图; (b)AFM探针操控微球成像示意图; (c)微球通用镜头适配器; (d)微球辅助显微镜OptoNano 200Figure1. (a) Schematic of spread the microspheres; (b) Schematic of AFM probes control microspheres; (c) The universal lens adaptor for the microsphere; (d)Microsphere assisted microscopy OptoNano 200.
近年来, 国内外****为了扩展微球超分辨成像技术的应用范围, 进行了大量改进研究. 为了实现对微球位置的控制, 2013年, Krivitsky等[18]通过气压吸附或胶水固化等方式将微球固定在玻璃微管尖端上, 实现了对间距73 nm的分割正方形的超分辨结构观察; 文献[19-21]中, 研究者先后使用毛细管微悬臂和AFM微悬臂黏附直径7.5 μm的微球, 实现了对DVD光盘的高分辨结构和刻蚀光栅的超分辨结构的观察; 2016年, Wang等[22]借助原有AFM系统, 将微球黏附在AFM探针尖端上, 利用AFM的等高扫描模式和接触扫描模式, 在短时间内实现大范围超分辨成像, 同时避免了探针对样品的破坏, 如图1(b)所示; 2018年, 陈涛等[23]将钛酸钡玻璃微球黏附在钨探针上, 使用多轴微动平台对微球进行精确操作实现了130 nm的超分辨成像. 这些装置都可以对特定区域进行超分辨成像, 但是微悬臂或者微探针的脆弱性会导致其发生损坏. 2017年, Yan等[24]通过自制透镜适配器将传统的显微镜物镜与微球集成一体, 实现了超分辨成像, 但是该适配器由3D打印而成, 精度不高, 微调难度较大, 同时无法对成像参数进行评价. 2018年, 新加坡国立大学Chen等[25]使用适配器将物镜与微球结合为一体, 开发了一款微球纳米成像平台, 如图1(c)所示, 该设计可以搭配不同类型的物镜和不同种类的微球, 利用步进电机调节微球与物镜之间的距离. 作者使用浸油物镜(100×, NA 1.4)和直径20 μm的二氧化硅微球在白光下观测到了23 nm的纳米点对特征. 在此基础上, 2020年, Phaos等[26]推出了OptoNano系列微球辅助显微镜, 如图1(d)所示, 在现有的OptoNano 200产品中, 将微球与物镜(50×, NA 0.55)结合为一体, 经分辨率板标定, 可以实现137 nm的分辨率.
目前存在的微球使用方式各有优势, 但是还未解决系统的易用性和成像参数的可控性等难题. 本文理论分析了微球聚焦光斑直径对超分辨能力的影响, 将微球与现有物镜整合一体, 集成侧视成像反馈系统, 实现了白光下对亚衍射极限样品的实时观测, 并对系统的成像参数进行分析. 理论和实验结果表明, 该系统可以在空气中实现超分辨成像, 极大提升了物镜性能, 精简了系统结构, 提高了微球的适用性, 降低了成像系统成本.
综合以上因素, 确定相关系统参数对微球成像能力进行仿真, 本文选用聚二甲基硅氧烷(PDMS)(折射率







首先研究半封装于PDMS中的不同直径BTG微球形成的光子纳米射流(photonic nanojet, PNJ)的状态. 如图2(a)所示, 蓝、绿、红三条曲线分别代表直径50, 75 和100 μm的BTG微球形成的光子纳米射流沿Z轴方向的光强变化曲线. 由图可知, 随着微球直径的增加, 光子纳米射流PNJ越长, 微球焦距越长, 且焦点处能量越大. 图2(b)表示三种直径微球形成的光子纳米射流半高宽(FWHM)在工作距离增加时的变化状态, 其中黑色直线表示衍射极限(λ/2 = 0.235 μm), 可以看到, 直径越大的微球可以在越长的工作距离下突破衍射极限, 如100 μm微球实现超分辨的工作距离 <13 μm, 75 μm微球的工作距离 <10 μm, 50 μm微球的工作距离 <7 μm, 并且在超出此工作距离后半高宽迅速提升, 伴随着明显的波动. 在三种尺寸微球的仿真结果对比中, 直径100 μm微球在较长工作距离内保持FWHM < λ/2, 呈现出更稳定的工作状态, 这也有助于实现更稳定的成像质量.
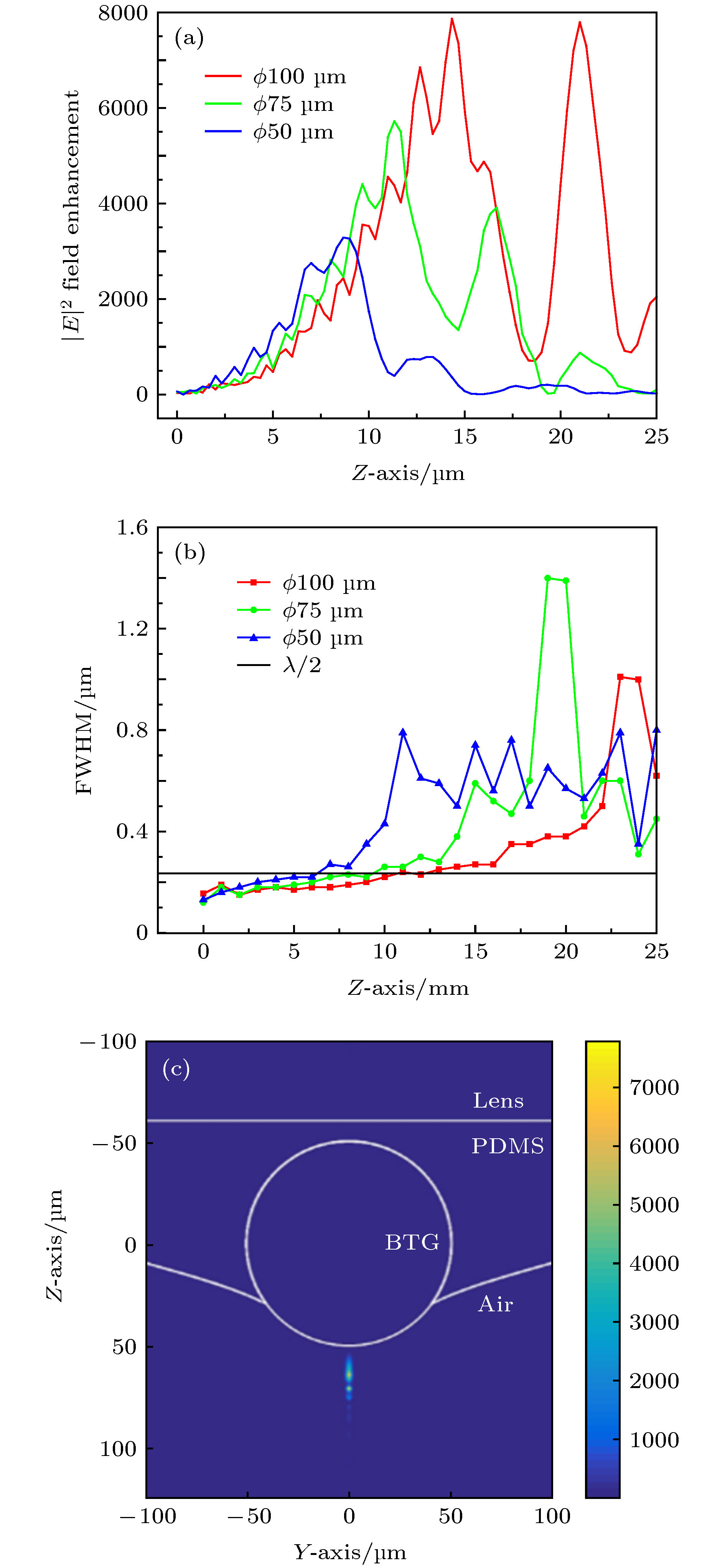 图 2 (a)直径50, 75 和100 μm的BTG微球形成的光子纳米射流沿Z轴方向的光强变化曲线; (b)三种直径微球形成的光子纳米射流的半高宽变化状态; (c)在波长470 nm的光源下, 直径100 μm微球形成的光子纳米射流状态
图 2 (a)直径50, 75 和100 μm的BTG微球形成的光子纳米射流沿Z轴方向的光强变化曲线; (b)三种直径微球形成的光子纳米射流的半高宽变化状态; (c)在波长470 nm的光源下, 直径100 μm微球形成的光子纳米射流状态Figure2. (a) Intensity curve value in Z-axis direction of the photonic nanojet formed by BTG microspheres with diameters of 50, 75 and 100 μm; (b) FWHM of the photonic nanojet formed by BTG microspheres; (c) The photonic nanojet formed by 100 μm microspheres at the wavelength of 470 nm.
同时, 对直径100 μm微球及其周围的电场强度分布进行仿真, 结果如图2(c)所示, 图中显示光线经过半封装微球聚焦后形成光子纳米射流, 该射流位于微球正下方一定距离的空气中, 且中间位置存在明显断层. 正好与图2(a)能量曲线中两个波峰之间的波谷相对应, 两个波峰的强度分别是入射光的7871倍和7797倍, 对应的工作距离分别为14.3和21 μm. 第一个波峰即为微球的焦点, 在焦点范围内, 微球聚焦光斑直径小于


实验装置及原理图如图3所示, 实验装置由显微成像系统和侧视成像反馈系统组成. 在显微成像系统中, 使用主波长470 nm的LED光源进行照明, 照明光路使用孔径光阑和视场光阑进行斜照调节, 以提高微球成像质量, 使用CMOS相机(OPLENIC, ΜSC180, 分辨率4912 × 3684 pixels, 像素尺寸1.25 μm × 1.25 μm)接收显微图像信息. 侧视成像模块由CMOS相机(Mshot, MS23, 分辨率1920 × 1200 pixels, 像素尺寸5.86 μm × 5.86 μm)搭配光学变焦镜头(XDS-10 A, 光学放大率2.8—18×, 工作距离32 mm)组成, 与一体化物镜和电动位移台(Shinopto, Nanomotor SNM01, 步长 <30 nm)相结合构成侧视成像反馈系统, 该系统可以辅助制作一体式微球物镜, 同时在使用时对微球成像参数进行精准调节. 与OptoNano 200相比, 该装置所具备的侧视成像反馈系统可以在成像过程中实时观测微球状态, 以实现对微球的精准操控, 避免微球或样品造成损坏.
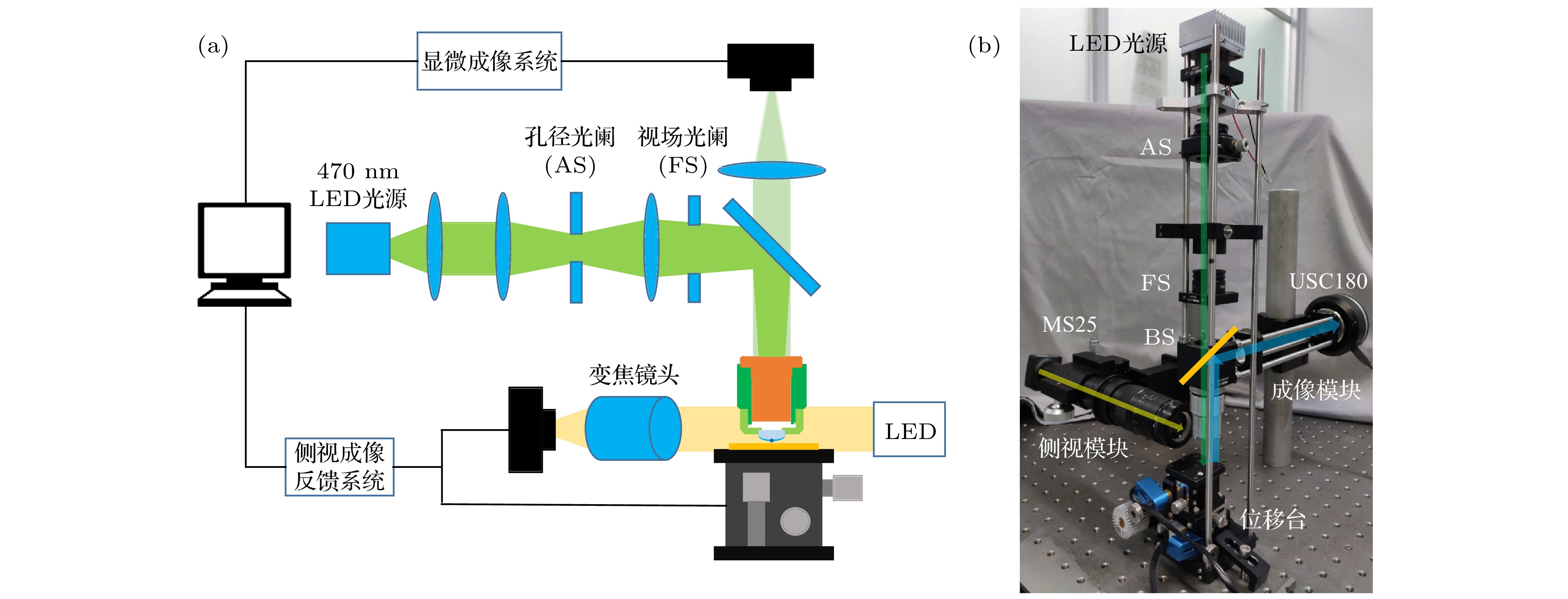 图 3 微球成像系统原理图及实验装置图
图 3 微球成像系统原理图及实验装置图Figure3. Schematic and experimental set-up diagram of microsphere imaging system.
一体化微球物镜如图4(a)所示, 该物镜由普通物镜(40×, NA 0.6, WD = 4 mm)、旋转套筒和固定套筒组成, 使用硅胶将微球封装在旋转套筒的平凸透镜(Thorlabs, LA1700, 直径D2 = 6 mm, 焦距f = 30 mm, 中心厚度1.8 mm, 曲率0.61)上, 套筒之间使用超细牙螺纹(螺距P = 0.35 mm)连接以实现轴线方向的精细可调. 制作过程如图4(b)所示, 主要包括制作分离的金属套筒, PDMS的滴加和旋涂(2000 rpm, 1 min, 形成10 μm厚涂层), 微球的黏附和加热固化(90 ℃, 30 min). 其中, 需要将物镜安装在显微系统上, 使用侧视成像反馈系统黏附微球. 侧视成像反馈系统如图4(c)所示, 微球黏附过程由侧视成像系统拍摄, 如图4(d)所示, 首先移动微球至物镜正下方, 此时由于LED光源的照射, 微球上呈现亮斑. 接着平凸透镜下压, 直至微球被PDMS吸附, 吸附完成后将位移台下移以避免二次接触已黏附的微球. 这样就可以将微球与物镜整合一体化, 实现特定区域的超分辨成像.
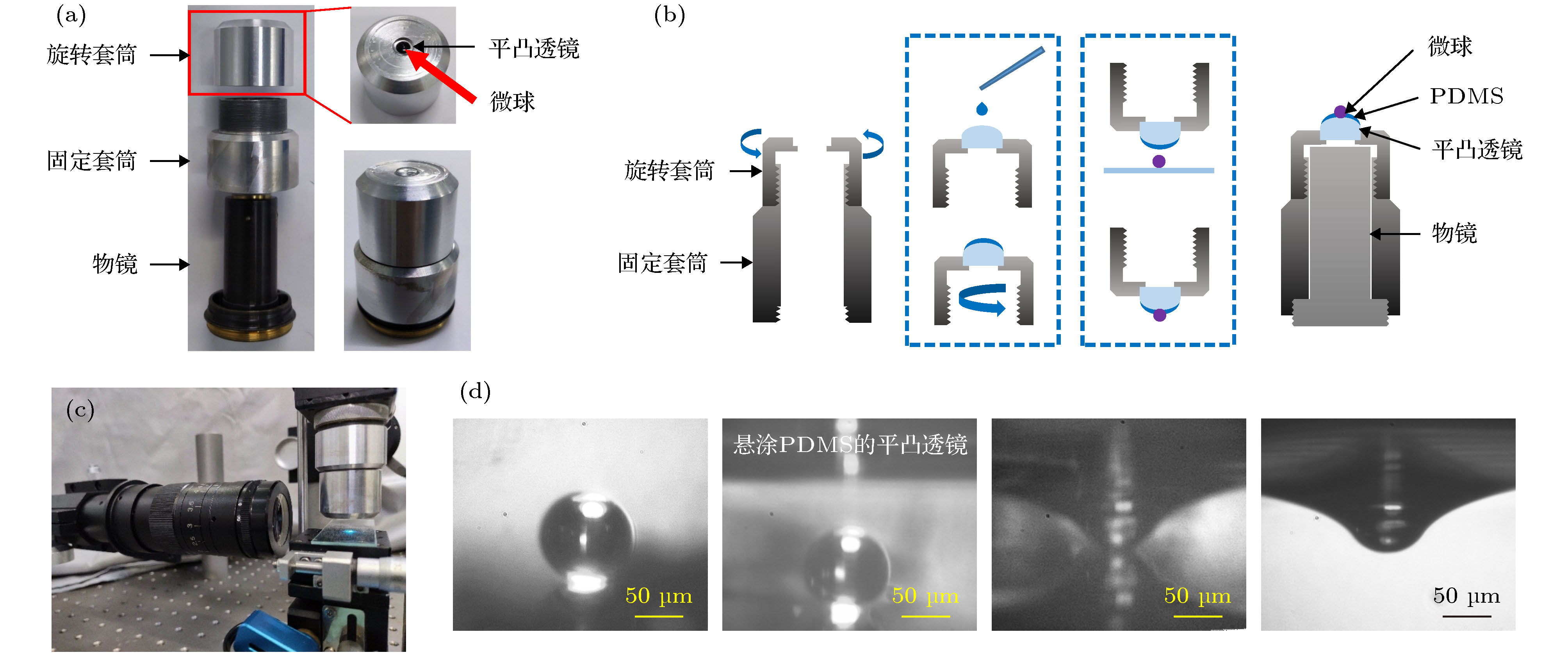 图 4 (a)超分辨微球物镜实物图; (b)超分辨微球物镜的制作过程, 主要包括1)套筒的制作, 2)PDMS的涂覆, 3)微球的黏附, 4)一体化物镜; (c)侧视成像反馈系统实物图; (d)微球的黏附过程, 主要包括1)微球的定位, 2)透镜的下压, 3)微球的黏附, 4)位移台的下移
图 4 (a)超分辨微球物镜实物图; (b)超分辨微球物镜的制作过程, 主要包括1)套筒的制作, 2)PDMS的涂覆, 3)微球的黏附, 4)一体化物镜; (c)侧视成像反馈系统实物图; (d)微球的黏附过程, 主要包括1)微球的定位, 2)透镜的下压, 3)微球的黏附, 4)位移台的下移Figure4. (a) Physical image of the super-resolution microsphere objective; (b) Fabrication of the super-resolution microsphere objective lens. It mainly includes 1) sleeves, 2) coating of PDMS, 3) adhesion of microspheres, 4) integrated objective lens; (c) Physical image of side-view imaging and position feedback system; (d) Adhesion of microspheres. It mainly includes 1) positioning of microspheres, 2) downward of the lens, 3) adhesion of microspheres, 4) downward of the displacement table.
其中, 在黏附和操控微球之前, 需要对侧视成像反馈系统进行标定, 对USAF1951分辨率板进行成像, 所采用的相机单像素尺寸为5.86 μm × 5.86 μm, 该系统最高可以分辨的线对为(group 7, element 6), 标定结果如图5(a)所示, 对应到相机靶面上的图像分辨率约0.41 μm/pixel. 同时, 使用侧视成像反馈系统对微球的工作距离进行测量, 如图5(b)所示, 图中下部分的微球是由上方的封装微球通过样品反射形成的倒影, 两球间距的一半即为工作距离, 此时微球的工作距离为12.65 μm. 通过标定, 可以利用该侧视成像系统对微球与样品之间的距离进行实时测量, 控制微球超分辨系统工作距离, 并防止微球碰触样品造成的样品损伤.
 图 5 (a)侧视成像反馈系统的标定; (b)标定后的侧视成像反馈系统可以对微球的工作距离进行实时测量, 此时微球工作距离为12.65 μm
图 5 (a)侧视成像反馈系统的标定; (b)标定后的侧视成像反馈系统可以对微球的工作距离进行实时测量, 此时微球工作距离为12.65 μmFigure5. (a) Calibration of side-view imaging feedback system; (b) An example of microsphere lens working at a distance of 12.65 μm.
实验结果如图6所示, 图6(a)为扫描电子显微镜(SEM)观测到的芯片内部的点阵列特征, 该点阵列中特征点长宽为400 nm, 间距为200 nm, 图6(b)是不使用微球, 只通过物镜对芯片进行观察得到的结果, 该图像无法分辨规则的点阵列结构. 图6(c)—图6(h)是使用微球在不同的工作距离上观测到的一系列图像, 在成像过程中, 一直用侧视成像系统对微球与样品之间的距离进行监测, 从而测量不同工作距离下的系统放大倍数以及视场范围. 如图6(c)—图6(h)所示, 每幅图的左侧是微球在不同工作距离下的显微成像图, 右上角是侧视成像系统监测到的相应的微球工作距离, 显微成像图中的白色圆圈内即为成像视场, 圆圈直径(白色直线)处的灰度变化情况如右下角的归一化灰度值曲线所示, 在成像视场内可以清晰观测到200 nm的芯片特征, 视场之外虽然也有被照亮的区域, 但是由于微球球差等因素的影响已无法清晰成像. 图6(i)是一体化物镜放大倍率随工作距离的变化曲线, 放大倍数随着工作距离的增加而增大. 可以发现, 工作距离在2.78—12.65 μm之间时, 通过使用封装直径100 μm微球的一体化物镜, 都可以在一定视场范围内清晰分辨出200 nm的芯片特征, 与仿真结果相符. 此外, 经过实际测量, 在工作距离2.78, 4.63, 5.55, 7.72, 9.57和12.65 μm处, 通过微球可以分别实现2.55×, 2.79×, 3.29×, 4.26×, 4.46×和5.12×的放大倍数, 视场范围(FOV)分别可以达到31.27, 34.94, 36.21, 44.18, 61.79和67.05 μm2. 总之, 随着微球工作距离的增加, 系统放大倍数逐渐增大, 成像视场不断增加, 但是图像对比度不断下降.
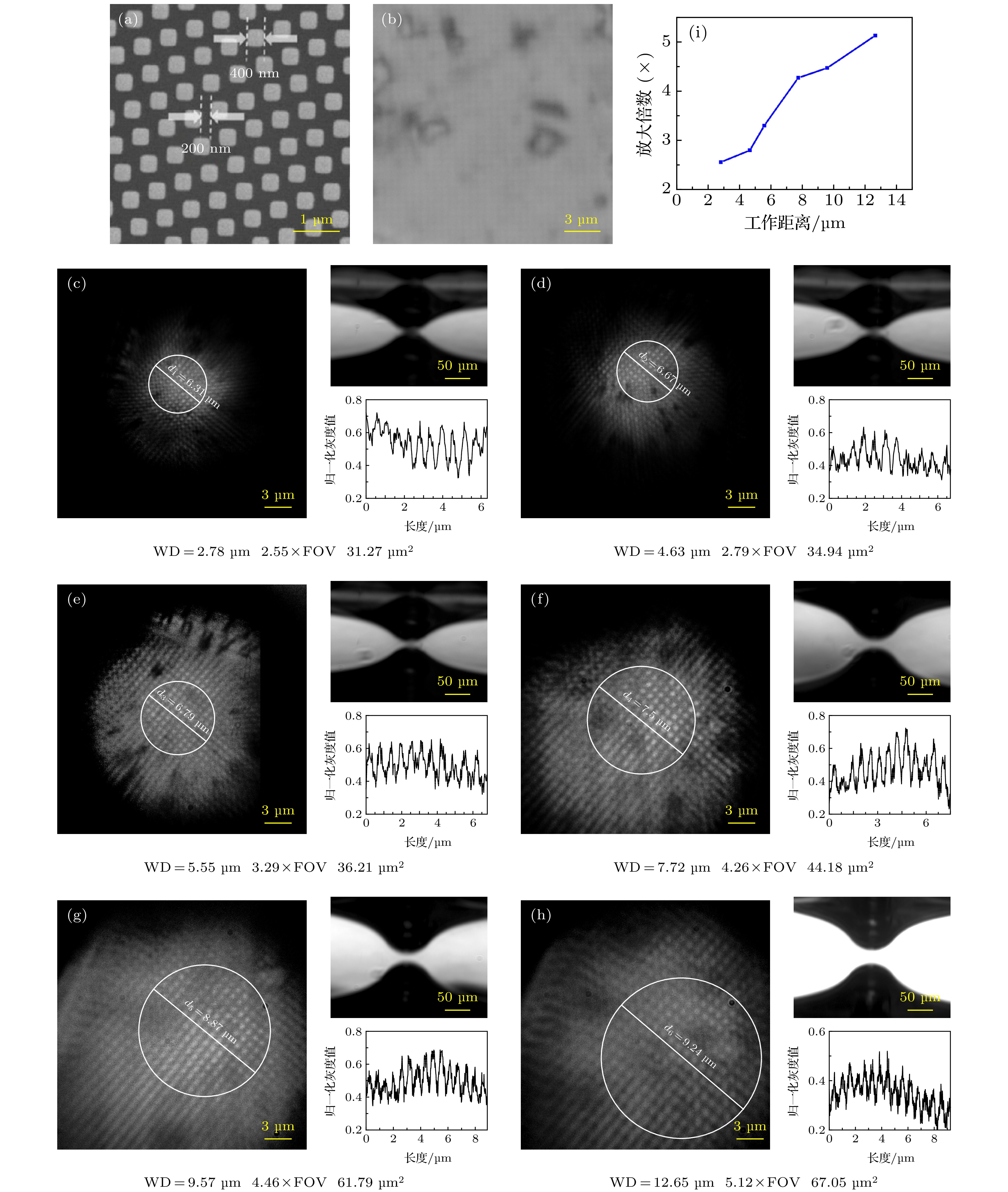 图 6 (a)扫描电子显微镜(SEM)观测到的CPU点阵结构; (b)不使用微球时的观察效果; (c)?(h)使用直径100 μm微球分别在工作距离2.78, 4.63, 5.55, 7.72, 9.57和12.65 μm处观察到的点阵效果, 每组图的左侧为显微图像, 其中白色圆圈内是视场范围, 直径(白色线段)处的灰度值变化曲线如右下角所示, 右上角是相应的侧视图. 它们都可以有效分辨出200 nm的点阵特征; (i)微球放大倍数与工作距离的关系曲线
图 6 (a)扫描电子显微镜(SEM)观测到的CPU点阵结构; (b)不使用微球时的观察效果; (c)?(h)使用直径100 μm微球分别在工作距离2.78, 4.63, 5.55, 7.72, 9.57和12.65 μm处观察到的点阵效果, 每组图的左侧为显微图像, 其中白色圆圈内是视场范围, 直径(白色线段)处的灰度值变化曲线如右下角所示, 右上角是相应的侧视图. 它们都可以有效分辨出200 nm的点阵特征; (i)微球放大倍数与工作距离的关系曲线Figure6. (a) The CPU lattice structure, 400 nm blocks and 200 nm intervals, observed by scanning electron microscope (SEM); (b) the observation without microsphere lens; (c)?(h) the lattice observed at the working distance of 2.78, 4.63, 5.55, 7.72, 9.57 and 12.65 μm, respectively, with 100 μm diameter microspheres. The left side of each group of images is the microscopic image, in which the field of view is inside the white circle, the gray value change curve at the diameter (the white line) is shown in the lower right corner, and the upper right corner is the corresponding side-view images. All of them can effectively distinguish 200 nm lattice features; (i) the relationship curve between the magnification factor and the working distance of the microsphere.
为进一步量化该成像系统的超分辨成像能力, 选用具有周期性条纹(周期为300 nm, 由200 nm的线宽和100 nm的沟槽组成)的蓝光光盘作为观测样品, 观测之前需要将光盘外层的保护膜去掉, 将条纹结构直接暴露在空气中.
观测结果如图7所示, 图7(a)是扫描电子显微镜(SEM)观测的蓝光光盘条纹图像. 图7(b)是在该成像系统下, 不使用微球对蓝光光盘进行观察的图像, 无法看到光盘上的条纹. 图7(c)是在该成像系统下, 使用封装直径100 μm微球的一体化物镜观测的图像, 左侧是显微成像图, 可以清晰看到规则的蓝光条纹, 其中白色圆圈内是视场范围, 约8.04 μm2, 圆圈外虽然也被照亮, 但是条纹特征逐渐消失, 直径(白色线段)处的灰度值变化情况如右下角灰度值归一化曲线所示, 可以明显分辨出与光盘周期性一致的条纹特征. 图片背景从左上至右下发生灰度值渐变, 是由于使用孔径光阑和视场光阑进行了斜照调节, 通过调节可以有效提高图像对比度. 右上角为相应的侧视成像图, 此时工作距离约为3 μm. 在实验中, 随着工作距离的不断增大, 图像对比度不断降低, 超分辨效果逐渐消失.
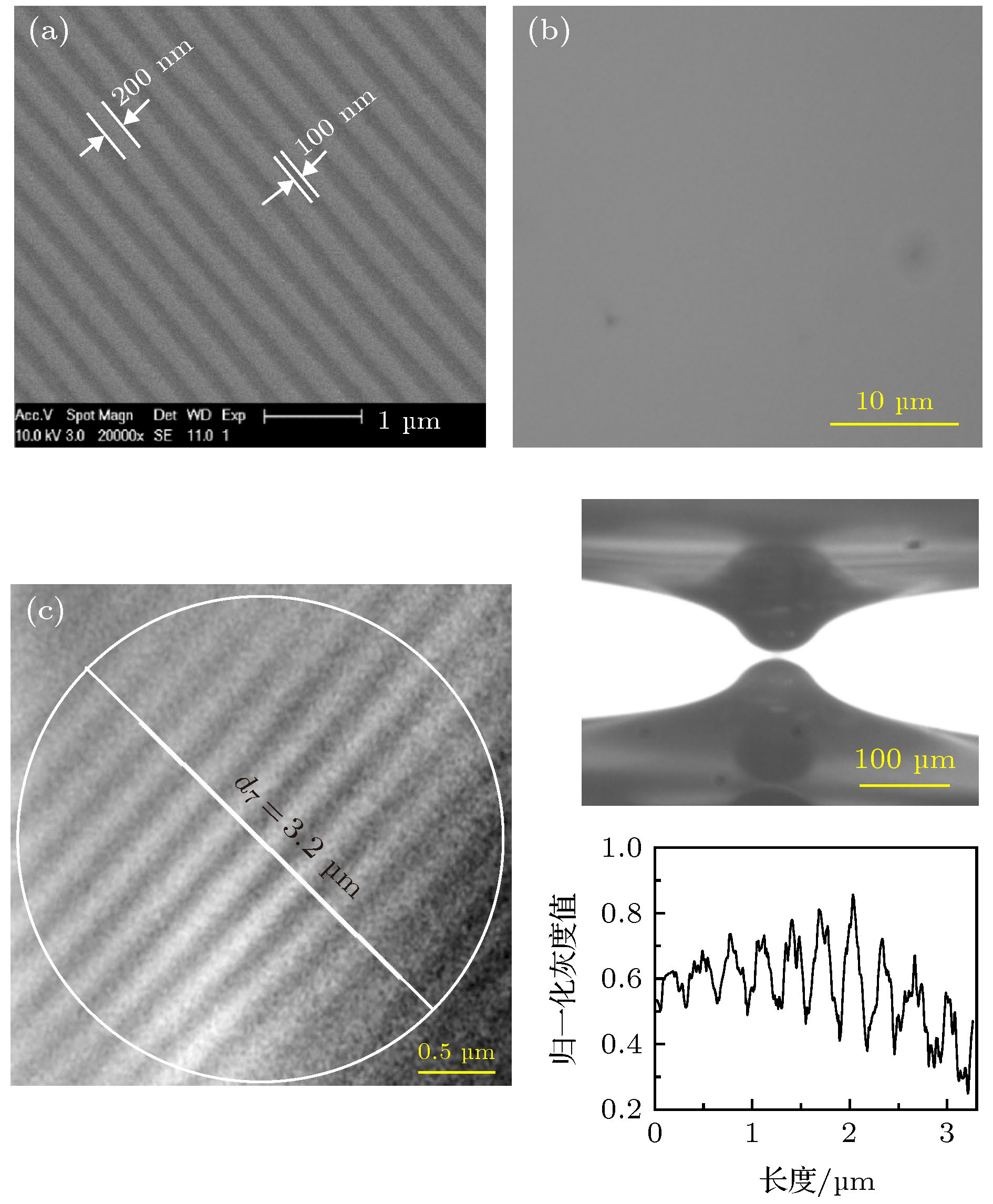 图 7 (a)扫描电子显微镜(SEM)观测到的蓝光光盘条纹; (b)不使用微球时的观察效果; (c)使用微球时的观察效果. 左侧为显微图像, 可以清晰地观察到蓝光光盘条纹, 其中白色圆圈内是视场范围, 直径(白色线段)处的灰度值变化曲线如右下角所示, 右上角是相应的侧视图. 此时的工作距离约为3 μm, 视场范围约8.04 μm2
图 7 (a)扫描电子显微镜(SEM)观测到的蓝光光盘条纹; (b)不使用微球时的观察效果; (c)使用微球时的观察效果. 左侧为显微图像, 可以清晰地观察到蓝光光盘条纹, 其中白色圆圈内是视场范围, 直径(白色线段)处的灰度值变化曲线如右下角所示, 右上角是相应的侧视图. 此时的工作距离约为3 μm, 视场范围约8.04 μm2Figure7. (a) The BD-ROM fringe observed by scanning electron microscope (SEM); (b) the observation without microsphere lens; (c) the observation with microsphere lens. The left side of image is the microscopic image, the BD-ROM fringe can be observed clearly, in which the field of view is inside the white circle, the gray value change curve at the diameter (the white line) is shown in the lower right corner, and the upper right corner is the corresponding side-view images. The working distance is about 3 μm and the field of view is about 8.04 μm2.
