1.Faculty of Maritime and Transportation, Ningbo University, Ningbo 315211, China 2.School of Hydraulic Engineering, Changsha University of Science and Technology, Changsha 410114, China
Abstract:Studies on hydrodynamic characteristics of viscous incompressible flows around flexible hydrofoils are of practical importance for the design and performance optimization of marine structures such as ship rudders and stabilizing fins. The aim of this paper is to extend a radial basis function based ghost cell method to simulate flows around single or multiple flexible moving hydrofoils in array arrangement. The numerical model is based on a ghost cell finite difference method for considering the influence of the immersed boundaries on the flow. Also, a compact supported radial basis function (CSRBF) is introduced to track the complex flexible boundary with some controlling points of the body surface. Based on the present method, the uniform flow around a flexible hydrofoil swimming like a fish is simulated. Good grid convergence of drag and lift coefficients demonstrates the accuracy and reliability of the present method. Also, the hydrodynamics patterns of the flexible hydrofoil under different oscillation frequencies are studied. Further, the thrust generation mechanism of the hydrofoil is explained. Afterwards, flows around the undulating hydrofoils in array arrangement are simulated. The force coefficients and wake patterns under different distances and oscillation frequencies are investigated. It is observed that the thrust coefficients of the hydrofoils under narrow arrangement and high oscillation frequencies have significant amplification effects. In addition, the critical frequency at zero thrust reduces. Keywords:Cartesian grid/ radial basis function/ flexible hydrofoils/ array arrangement
本节模拟了9个以阵列布置水翼在均匀流中的振荡运动以研究鱼群游动中振荡水翼表面的力模式和尾涡形态. 为了简化计算模型, 研究聚焦于中心位置的水翼, 该水翼以(6)式指定的模式进行振荡运动, 其余水翼保持静止. 几何模型如图8所示, 计算区域设置为[–4b, 12b] × [–4b, 4b]. 水翼之间的横向间距和纵向间距相同, 研究了三个间距下鱼群的力系数特性, 间距G分别为G = 0.25, 0.5和1 m. 根据3.1节的网格收敛性结果, 采用均匀网格对水翼附近[–2.5b, 2.5b] × [–1.5b, 1.5b]的区域进行细化, 在x和y方向的最小网格间距分别为0.005 和0.004 m, 对应于3.1节的收敛网格. 边界条件和计算参数的设置类似于3.1节, 本节研究了五个振荡角频率($\omega $ = 0.15, 0.30, 0.45, 0.60和0.75)下中间位置水翼的力模式和尾涡形态. 图 8 阵列布置水翼游动的几何模型 Figure8. Geometrical model of the undulating hydrofoil in array arrangement.
首先对中间位置水翼表面的升阻力系数进行了定量分析. 图9比较了三个位置下群游中间位置水翼和单水翼游动中振荡频率和水翼表面力系数之间的关系. 在水翼间距G = 1 m时, 中间位置水翼的平均阻力系数和升力均方根系数与3.1节单水翼绕流算例近似, 由于距离远, 邻近水翼对中间位置水翼的影响较为微弱, 中间水翼保持相对独立的游动模式. 当间距缩小为G = 0.5 m时, 水翼之间存在显著的水动力相互作用, 力系数对振荡频率的敏感性增加, 当振荡频率从ω = 0.15增加到ω = 0.75时, 平均阻力系数从 0.32降低到–0.38, 升力均方根系数从0.41增加到4.11. 当缩小到最窄间距G = 0.25 m时, 此时水动力相互作用最为显著, 在振荡频率从$\omega = 0.15$增加到$\omega = 0.75$时, 平均阻力系数从0.32降低到–0.67, 升力均方根系数从0.75增加到10.10. 值得注意的是, 相比单水翼绕流, 水翼表面阻力变为推力的临界频率从大约0.60减小到0.45左右, 说明水翼群游时, 水翼可以以更少的能量消耗获得同样推力. 在低振荡频率ω = 0.15时, 三个间距下的水动力相互作用力系数变化不大, 因为此频率下脱落的尾涡结构相对稳定独立, 受到周围水翼的影响小. 在振荡频率ω = 0.75时, G = 0.25 m时群游中间水翼相比单水翼绕流可获得2.5倍的平均推力增加, 升力均方根系数可获得3倍增加, 说明增大激励频率可放大水翼之间的水动力相互作用, 也说明群游水翼在相同的运动形式下能获得更高的游动效率, 这反映出鱼类群游的水动力学优势. 图 9 三个间距下群游中间位置水翼和单水翼在五个频率下的力系数比较 (a)平均阻力系数; (b)均方根升力系数 Figure9. Comparison of force coefficients between the central hydrofoil in array arrangement for three gap distances and the single hydrofoil under five frequencies: (a) Average drag coefficient; (b) root mean square lift coefficient.
图10展示了G = 0.5 m时群游中间位置水翼游动中三个频率下升力和阻力系数随无因次时间的变化趋势. 群游水翼的升阻力系数变化趋势与单水翼类似, 然而相比单水翼游动, 随着激励频率的增加, 升力系数以更大的幅值和更大的偏斜呈现周期性的振荡特性, 阻力系数呈现更加明显的波谷平坦和波峰尖锐的现象. 图 10 群游中间位置水翼在三个频率下升阻力系数随无因次时间的变化趋势 (a)阻力系数; (b)升力系数 Figure10. Variation of drag and lift coefficients on the central hydrofoil in array arrangement with the dimensionless time under three oscillation frequencies: (a) Drag coefficient; (b) lift coefficient.







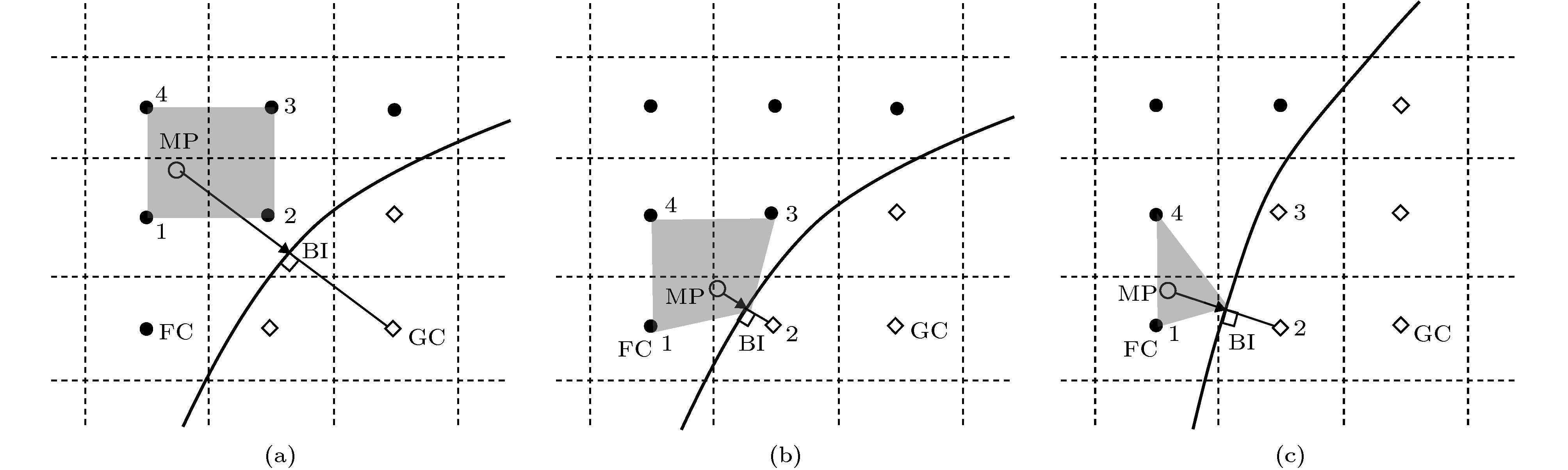 图 1 虚拟网格法的二维插值格式 (a)无虚拟网格; (b)一个虚拟网格; (c)两个虚拟网格
图 1 虚拟网格法的二维插值格式 (a)无虚拟网格; (b)一个虚拟网格; (c)两个虚拟网格






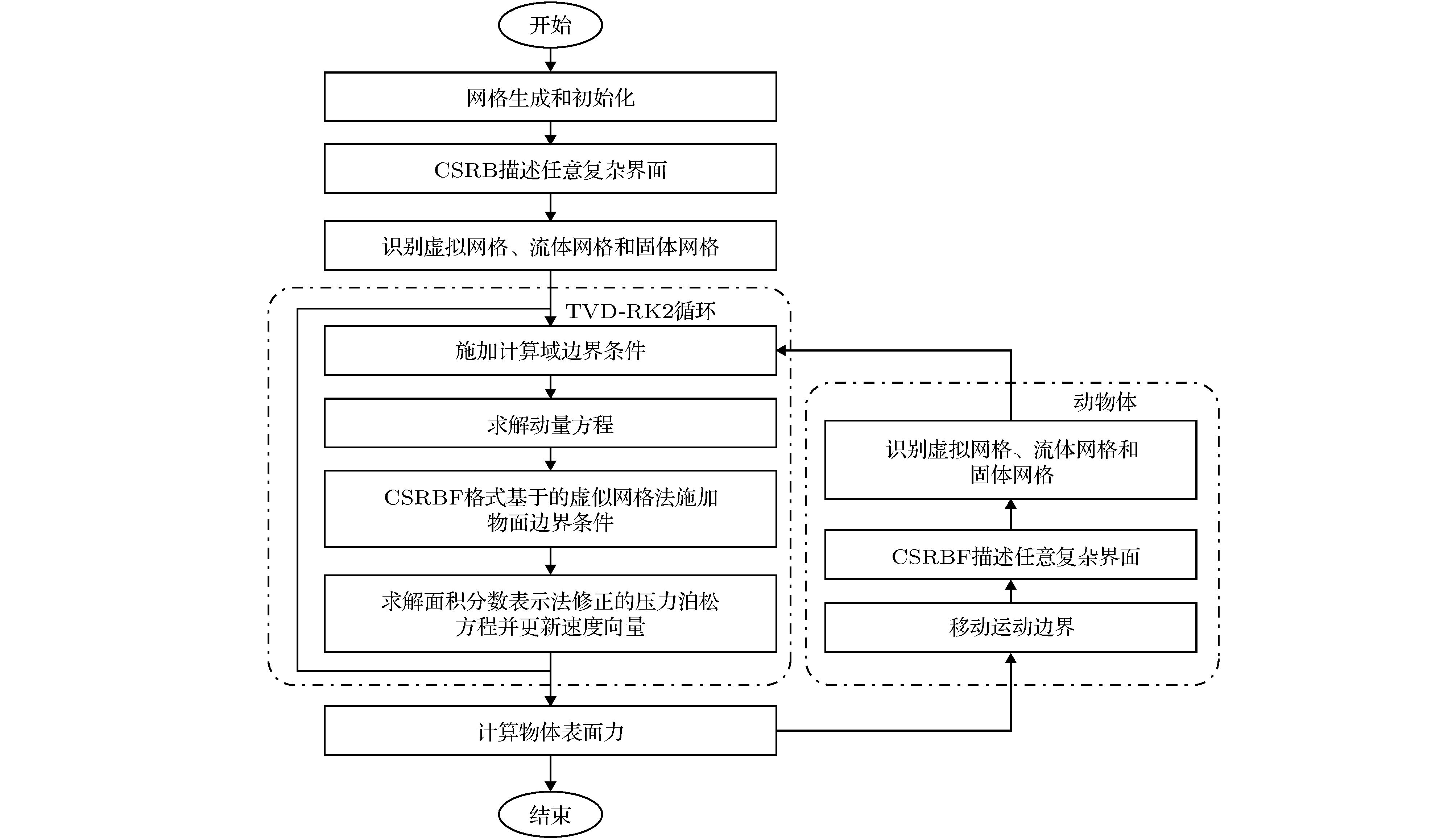 图 2 静止或运动边界流动求解算法的流程图
图 2 静止或运动边界流动求解算法的流程图























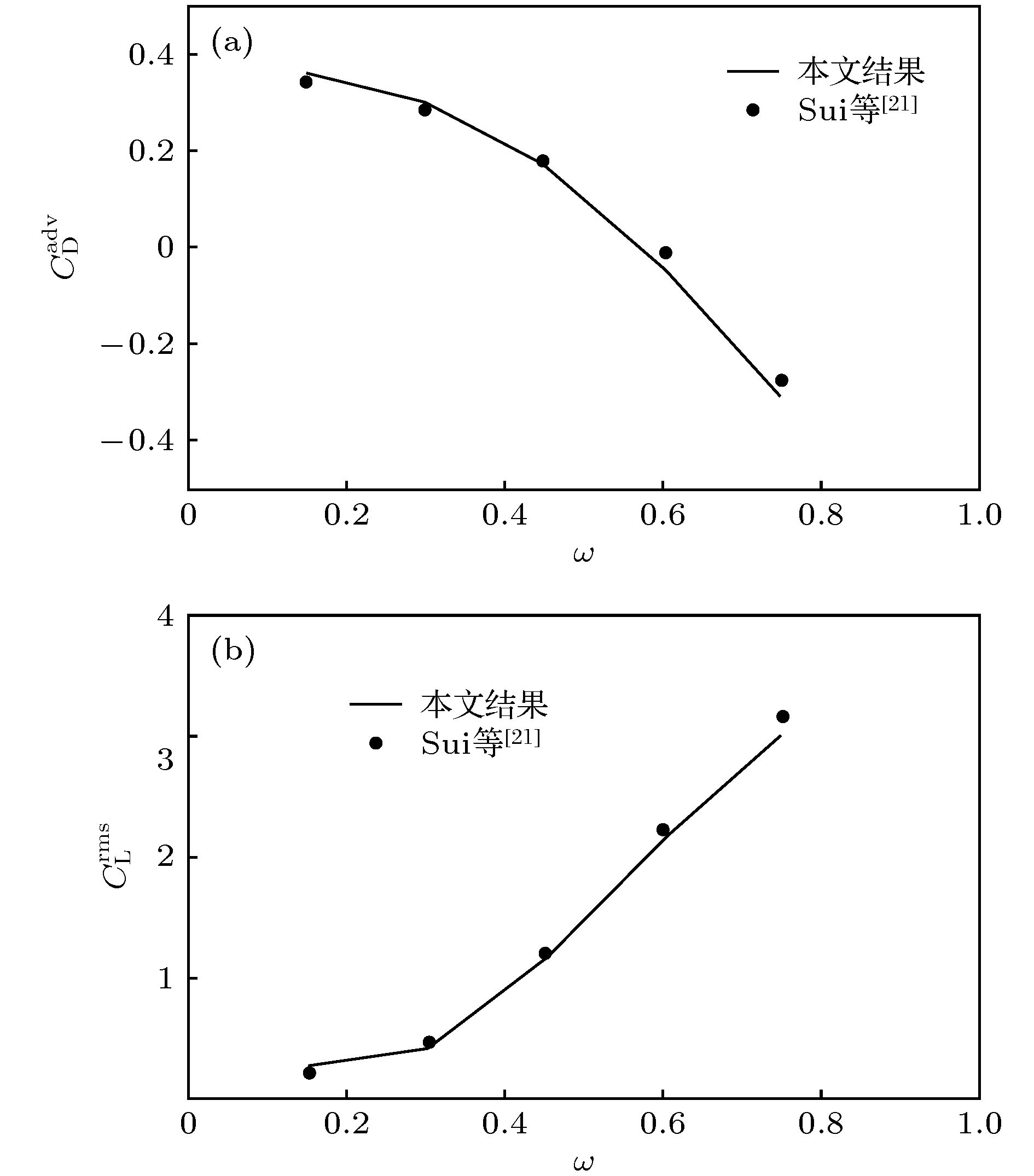 图 3 五个频率下的力系数比较 (a) 平均阻力系数; (b) 均方根升力系数
图 3 五个频率下的力系数比较 (a) 平均阻力系数; (b) 均方根升力系数





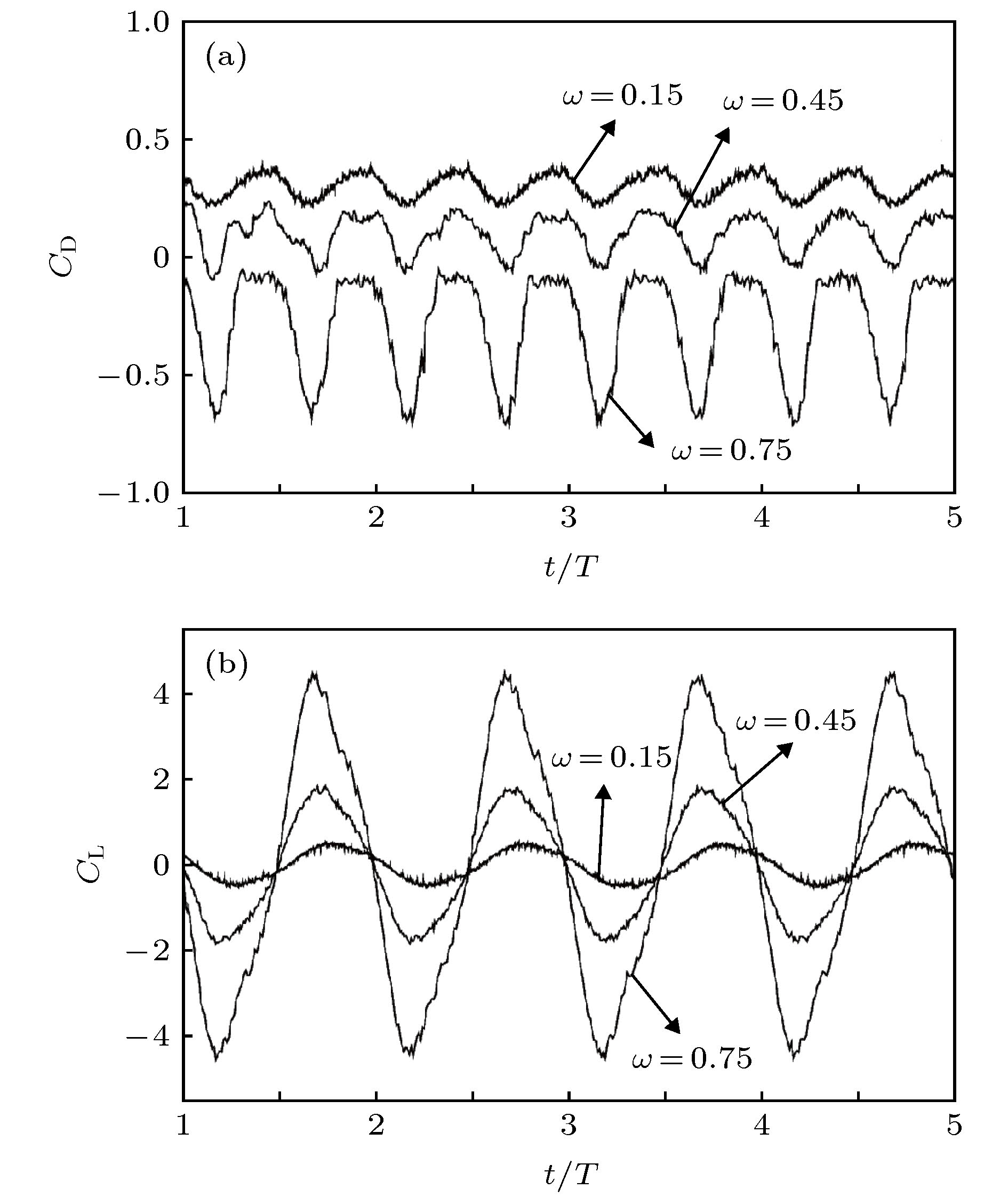 图 4 三个频率下升阻力系数随无因次时间的变化趋势 (a) 阻力系数; (b) 升力系数
图 4 三个频率下升阻力系数随无因次时间的变化趋势 (a) 阻力系数; (b) 升力系数








 图 5
图 5 






 图 7
图 7 






 图 6
图 6 







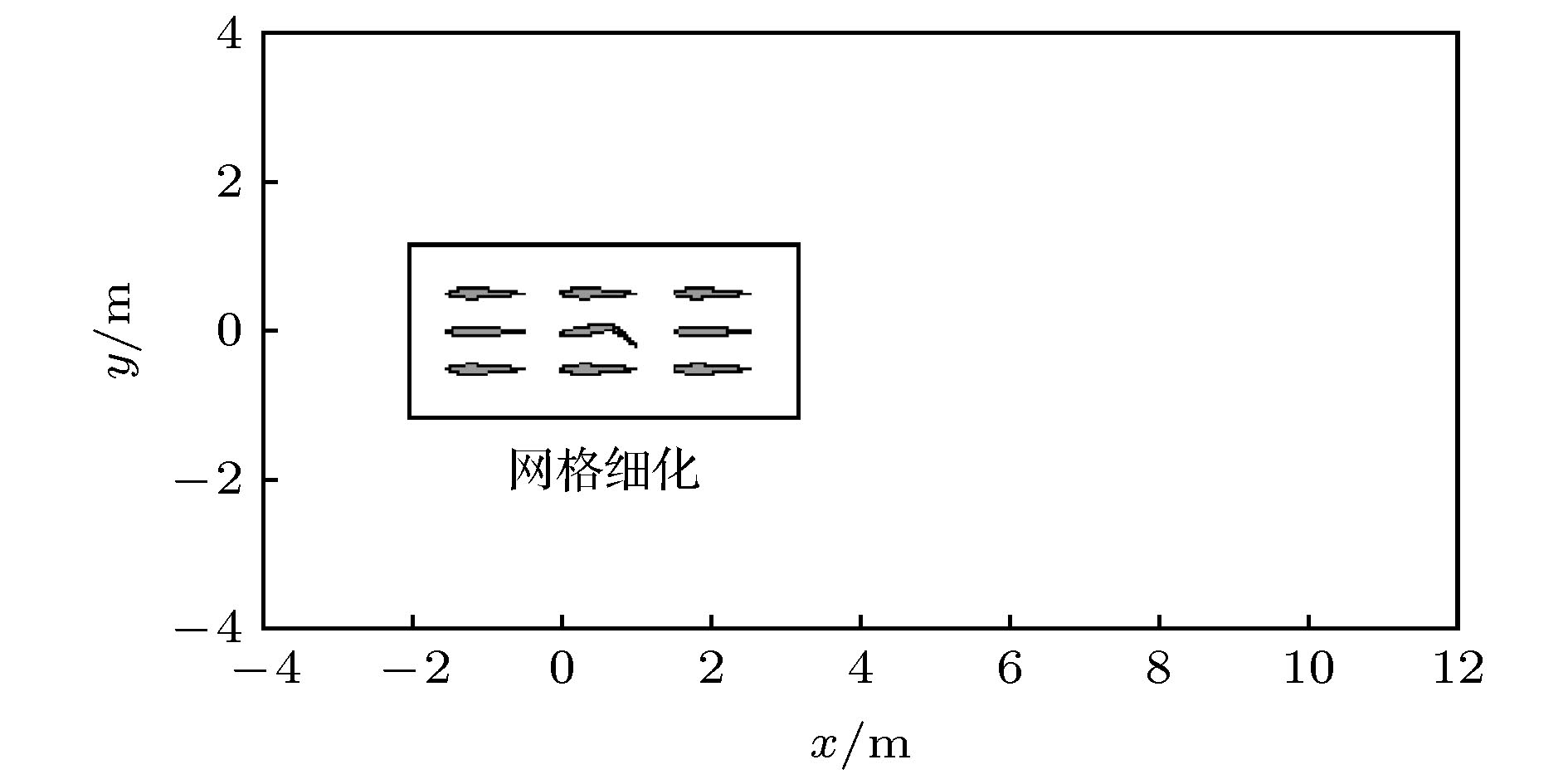 图 8 阵列布置水翼游动的几何模型
图 8 阵列布置水翼游动的几何模型

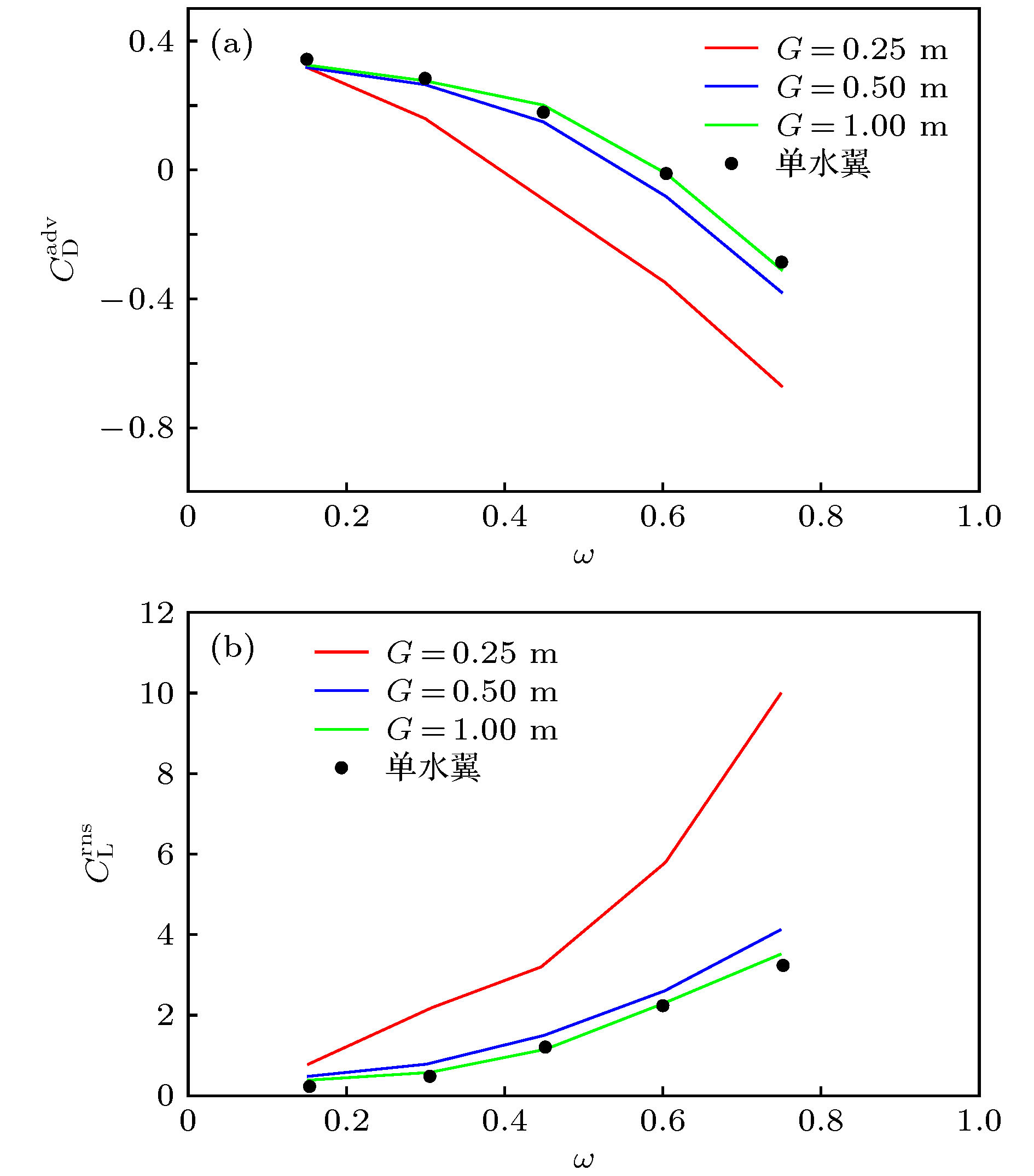 图 9 三个间距下群游中间位置水翼和单水翼在五个频率下的力系数比较 (a)平均阻力系数; (b)均方根升力系数
图 9 三个间距下群游中间位置水翼和单水翼在五个频率下的力系数比较 (a)平均阻力系数; (b)均方根升力系数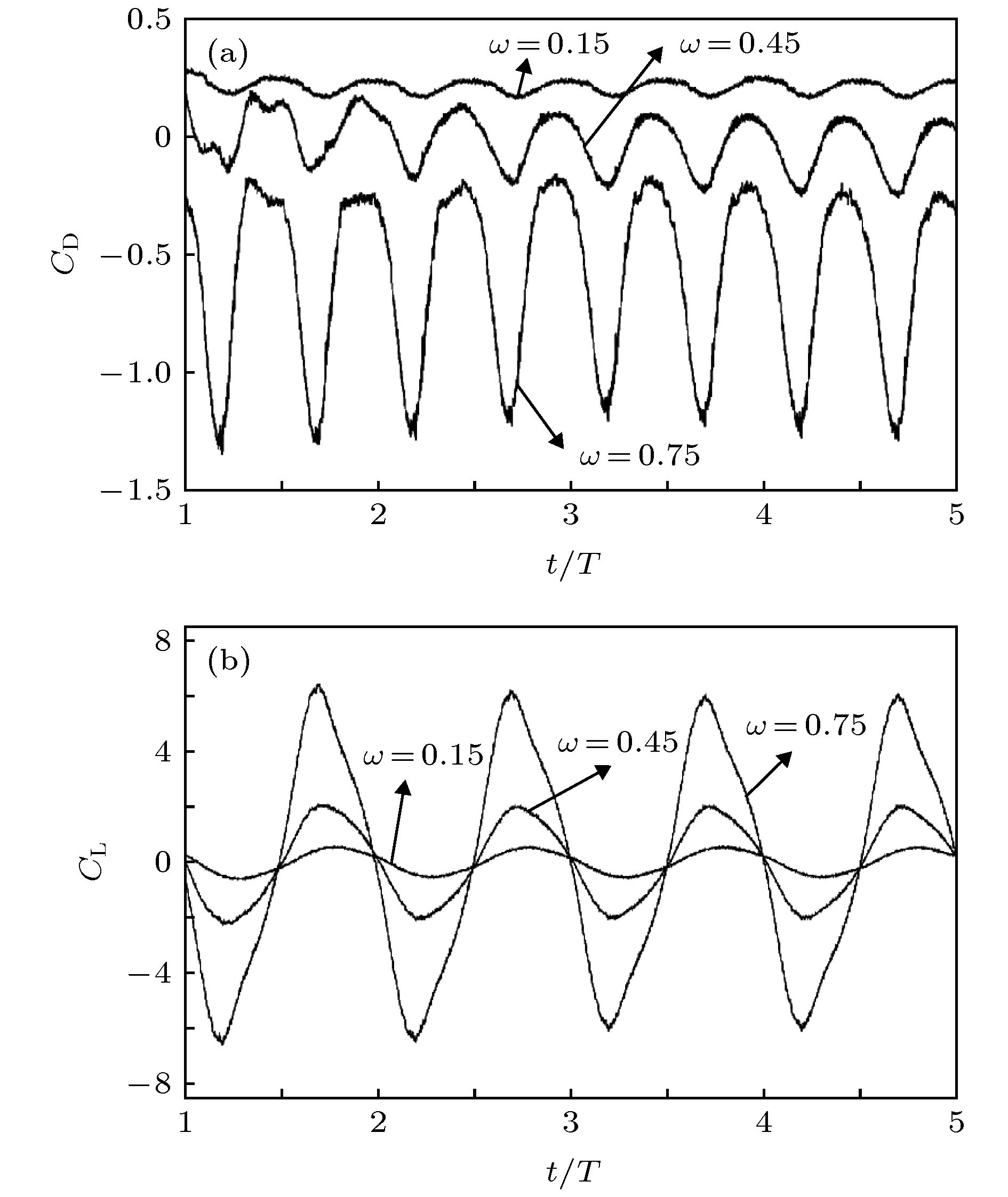 图 10 群游中间位置水翼在三个频率下升阻力系数随无因次时间的变化趋势 (a)阻力系数; (b)升力系数
图 10 群游中间位置水翼在三个频率下升阻力系数随无因次时间的变化趋势 (a)阻力系数; (b)升力系数 图 11
图 11 





 图 12
图 12 






 图 13
图 13 








