Fund Project:Project supported by the National Key Research and Development Program of China (Grant No. 2018YFA0605902) and the National Natural Science Foundation of China (Grant No. 11772085)
Received Date:13 July 2019
Accepted Date:12 August 2019
Available Online:27 November 2019
Published Online:05 December 2019
Abstract:Granular flow in the drum widely appears in the fields of industrial production, and discrete element method (DEM) proves to be a critical tool for studying the flow characteristics of granular materials. Considering simple contact and efficient calculations, the three-dimensional spheres are originally adopted by the DEM. Therefore, the DEM simulations mainly focus on spherical particles, while the dynamics of non-spherical particles in rotating drums is relatively rarely studied. It is reported that particle shape significantly affects the macroscopic and microscopic properties of the granular flow. Compared with spherical particles, non-spherical particles have low fluidity and great interlock. Meanwhile, it is questionable whether conclusions drawn from spherical particle systems can be transplanted to non-spherical particle systems. In this work, super-quadric equations based on continuous function representation are used to describe the spherical and ellipsoidal particles. Considering the complex contact detection between particles, the Newton iteration algorithm is used to solve the non-linear equations. Meanwhile, a non-linear contact model considering the equivalent radius of curvature at the local contact point is used to calculate the contact force between the super-quadric elements.To examine the validity of DEM model, we compare our simulated results with the previous experimental results for mixing process of ellipsoids, and this method is verified by good agreement between the simulated results and the experimental results. According to the aforementioned method, the influences of rotating speed, fill level, and aspect ratio on the mixing rate are discussed. The results show that the granular system reaches the cascading regime and the S-shaped surface of the granular bed is observed. In addition, Lacey mixing index is used to quantify the mixing of granular systems, and the mixing rate is obtained by fitting the Lacey mixing index. The mixing rate increases as the rotating speed increases. At the same rotating speed, the mixing rate of ellipsoids is faster than that of spheres. Meanwhile, the ellipsoidal particles have the fastest mixing rate when the aspect ratio is 0.75 or 1.50. When the aspect ratio is less than 0.75, the mixing ratio increases as the aspect ratio increases; when the aspect ratio is greater than 1.50, the mixing ratio decreases as the aspect ratio increases. Moreover, more pronounced velocity stratification is observed for ellipsoids. The translational kinetic energy of ellipsoidal particles is higher than that of spherical particles, and their rotational kinetic energy is lower than that of spheres. The aspect ratio of particles can adjust the contact mode between particles and cause the interlock. It means that the relative rotation between particles is limited and the efficiency of the external energy transferring to the non-spherical system may be improved. Keywords:discrete element method/ super-quadric element/ ellipsoidal particle/ mixing characteristics
式中, a, b和c分别表示颗粒沿主轴方向的半轴长, n1和n2表示颗粒表面的尖锐度参数. 当参数满足n1 = n2 = 2时, 该方程可以构造球体或椭球颗粒. 图1显示在超二次曲面方程中改变不同的半轴长得到不同的球体或椭球单元模型. 图 1 球体和椭球的超二次曲面离散元模型 (a) a = b = 2c; (b) a = b = c; (c) a = b = 0.5c Figure1. Super-quadric discrete element model of spherical and ellipsoidal elements: (a) a = b = 2c; (b) a = b = c; (c) a = b = 0.5c
式中, $ S_0^2 $和$ S_{\rm r}^2 $分别为颗粒系统完全分离和完全混合时的方差, 可表示为$S_0^2 = p\left( {1 - p} \right)$和$S_{\rm{r}}^2 = $$ p\left( {1 - p} \right)/N$. p为颗粒系统内一种颗粒所占的百分比; N为一个样本内颗粒的平均数量; S2为当前混合状态的方差. 考虑转筒上部没有颗粒, 因此采用加权的方法准确计算圆筒内颗粒材料的混合指数[40]. 总计1000个椭球颗粒在圆筒容器中考虑单元的随机位置和角度并在重力作用下实现堆积. 当容器内颗粒无相对运动时, 圆筒开始旋转并将离散元模拟的数值结果与实验结果[31]进行对比, 如图3(a)所示. 同时, 将不同转速ωr下的Lacey混合指数进行对比, 如图3(b)和图3(c)所示. 可以发现, 随着转筒圈数的增加, 红色和蓝色颗粒呈螺旋形进行混合, 且混合指数逐渐增加并最终达到稳定. 尽管离散元计算的数值结果与实验结果存在一定的偏差, 但在一定程度上可以很好地反映椭球颗粒的流动过程和混合特性, 同时表明基于超二次曲面DEM模型的有效性. 图 3 不同转动圈数下颗粒混合过程的实验结果[31]和离散元数值结果的对比 (a) ωr = 20 r/min的流动图案; (b) ωr = 20 r/min的Lacey混合指数; (c) ωr = 40 r/min的Lacey混合指数 Figure3. Comparison of mixing process between experiment results[31] and DEM simulation results at different rotating speeds: (a) Mixing pattern at 20 r/min; (b) Lacey mixing index at 20 r/min; (c) Lacey mixing index at 40 r/min.
4.转动速度与长宽比对混合率的影响颗粒形状、填充分数和圆筒转速是影响颗粒材料混合特性的重要因素. 这里, 水平转筒的内径D0为200 mm, 长L0为50 mm, 并且在z方向施加周期性边界条件, 如图4(a)所示. 采用超二次曲面方程构造不同长宽比的椭球颗粒, 函数参数满足: σ = c/a(=b)且σ∈[0.25, 3.0], 如图4(b)所示. 不同形态的颗粒具有相同的质量, 且等体积球体半径为2 mm, 颗粒数量为10000个. 颗粒间的摩擦系数μs = 0.65, 颗粒与筒壁间的摩擦系数μws = 0.85, 阻尼系数Cn = Ct = 0.1, 其余计算参数列于表1中. 图 4 三维水平圆筒的离散元数值模型(a)和不同长宽比的椭球模型(b) Figure4. Schematic diagram of three-dimensional horizontal drum simulated by DEM model (a) and examples of ellipsoids with different aspect ratios (b)
 图 1 球体和椭球的超二次曲面离散元模型 (a) a = b = 2c; (b) a = b = c; (c) a = b = 0.5c
图 1 球体和椭球的超二次曲面离散元模型 (a) a = b = 2c; (b) a = b = c; (c) a = b = 0.5c













 图 2 超二次曲面单元间的接触检测
图 2 超二次曲面单元间的接触检测











 图 3 不同转动圈数下颗粒混合过程的实验结果[31]和离散元数值结果的对比 (a) ωr = 20 r/min的流动图案; (b) ωr = 20 r/min的Lacey混合指数; (c) ωr = 40 r/min的Lacey混合指数
图 3 不同转动圈数下颗粒混合过程的实验结果[31]和离散元数值结果的对比 (a) ωr = 20 r/min的流动图案; (b) ωr = 20 r/min的Lacey混合指数; (c) ωr = 40 r/min的Lacey混合指数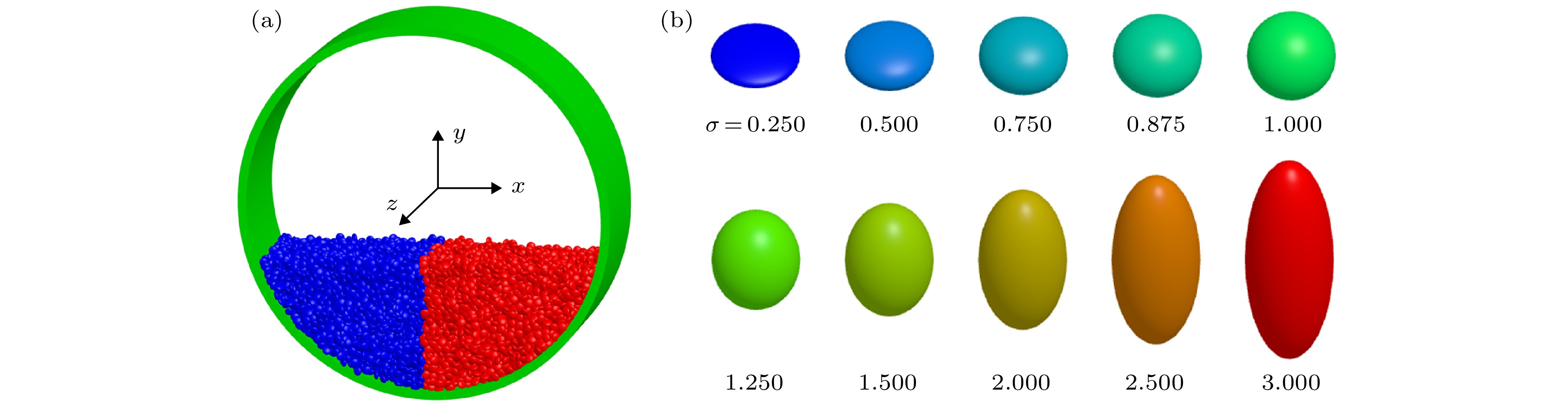 图 4 三维水平圆筒的离散元数值模型(a)和不同长宽比的椭球模型(b)
图 4 三维水平圆筒的离散元数值模型(a)和不同长宽比的椭球模型(b) 图 5 旋转速度和颗粒长宽比对混合过程的影响 (a) ωr = 20 r/min的椭球颗粒(σ = 3.0); (b) ωr = 40 r/min的椭球颗粒(σ = 3.0); (c) ωr = 20 r/min的球体颗粒(σ = 1.0); (d) ωr = 20 r/min的椭球颗粒(σ = 0.5)
图 5 旋转速度和颗粒长宽比对混合过程的影响 (a) ωr = 20 r/min的椭球颗粒(σ = 3.0); (b) ωr = 40 r/min的椭球颗粒(σ = 3.0); (c) ωr = 20 r/min的球体颗粒(σ = 1.0); (d) ωr = 20 r/min的椭球颗粒(σ = 0.5)


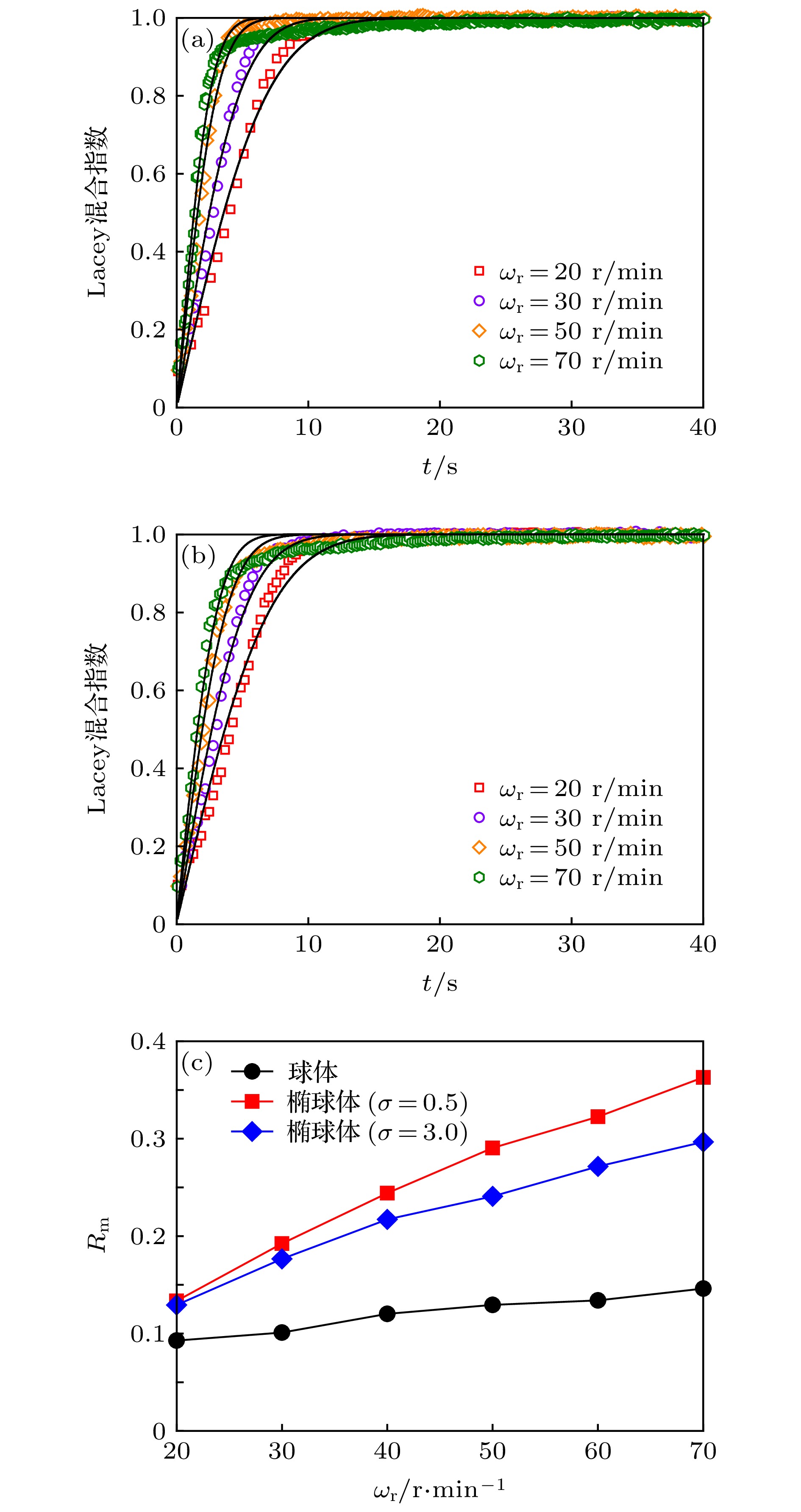 图 6 旋转速度和颗粒形状对Lacey混合指数和混合率的影响 (a) 椭球颗粒(σ = 0.5); (b) 椭球颗粒(σ = 3.0); (c) 混合率
图 6 旋转速度和颗粒形状对Lacey混合指数和混合率的影响 (a) 椭球颗粒(σ = 0.5); (b) 椭球颗粒(σ = 3.0); (c) 混合率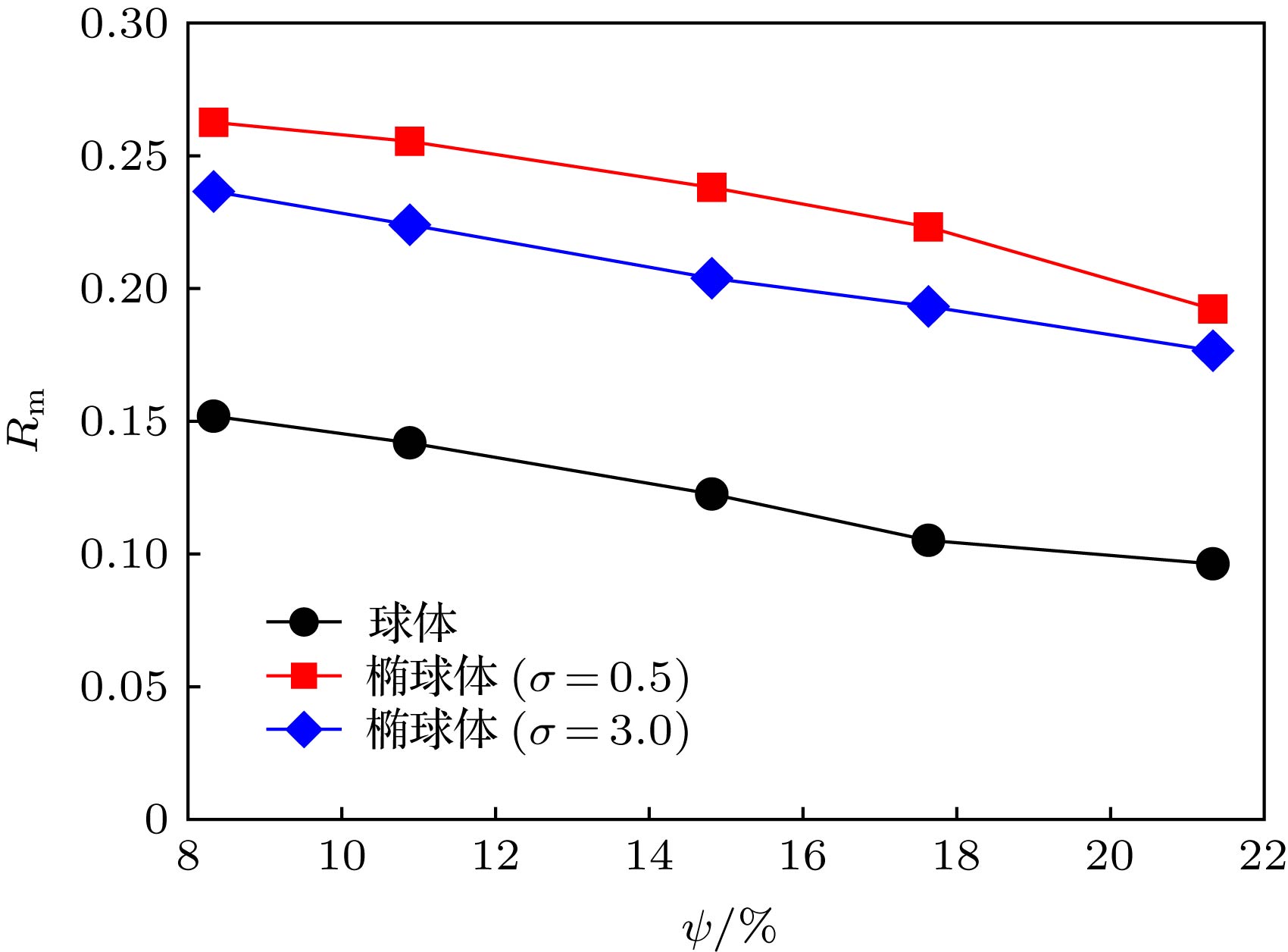 图 7 ωr = 30 r/min时椭球和球形颗粒的混合率随填充分数的变化
图 7 ωr = 30 r/min时椭球和球形颗粒的混合率随填充分数的变化 图 8 ωr = 30 r/min时椭球颗粒的混合率和初始体积分数的变化 (a)混合率; (b)初始密集度
图 8 ωr = 30 r/min时椭球颗粒的混合率和初始体积分数的变化 (a)混合率; (b)初始密集度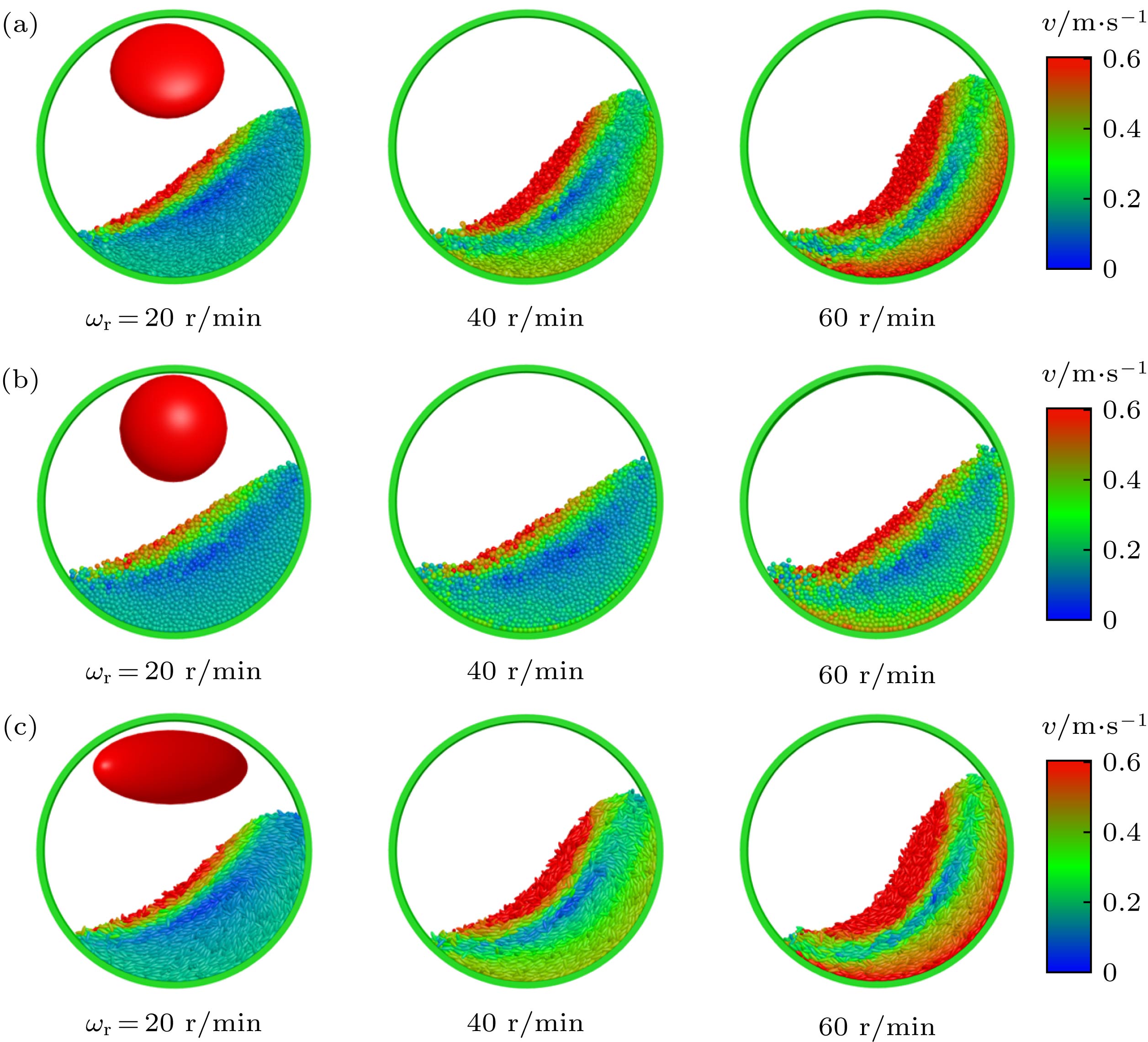 图 9 不同转速下球体和椭球颗粒的速度分布 (a) 椭球(σ = 0.5); (b) 球体(σ = 1.0); (c) 椭球(σ = 3.0)
图 9 不同转速下球体和椭球颗粒的速度分布 (a) 椭球(σ = 0.5); (b) 球体(σ = 1.0); (c) 椭球(σ = 3.0)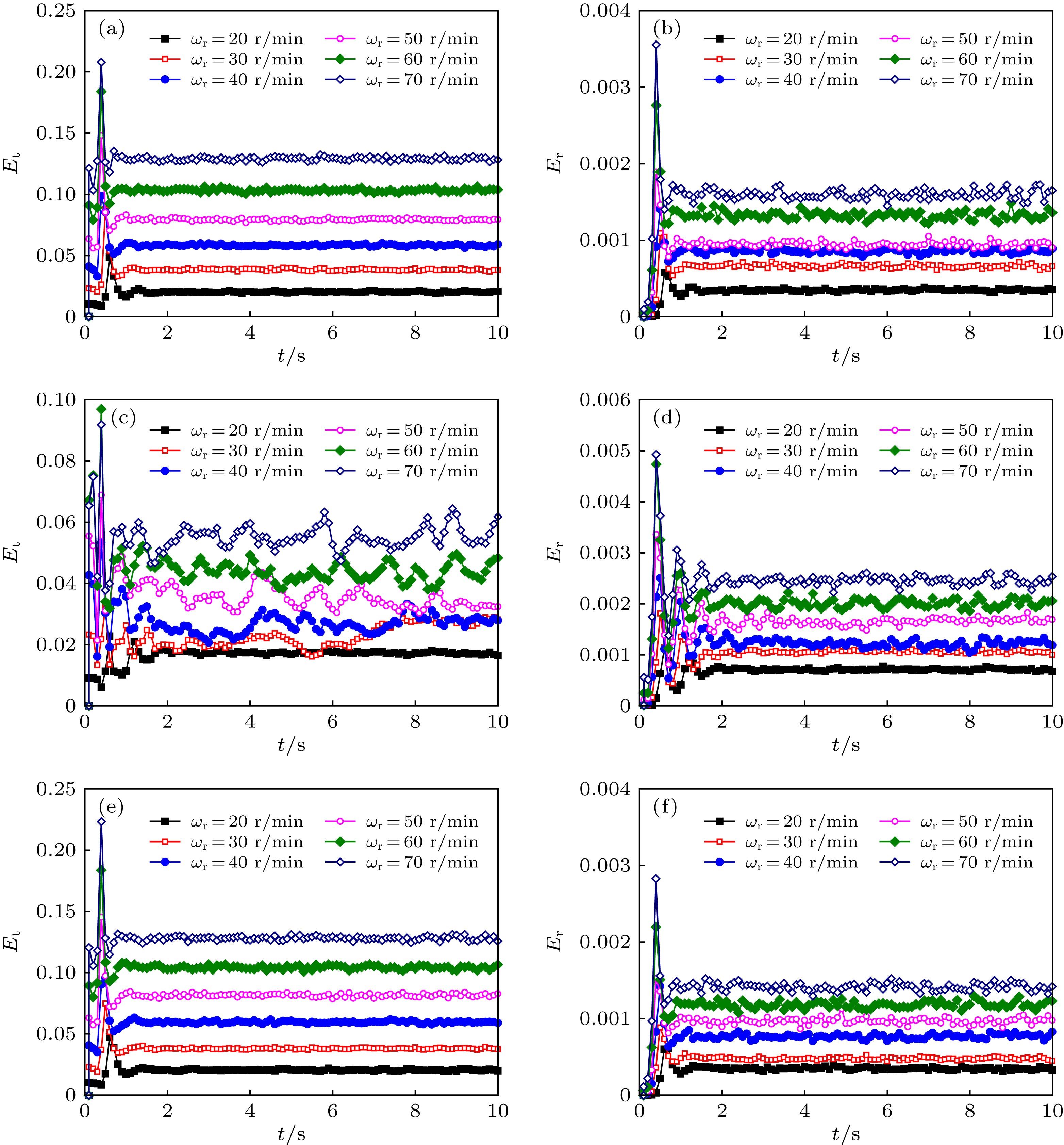 图 10 在不同转速下球体和椭球颗粒的平动动能和转动动能随时间的变化 (a), (b) 椭球(σ = 0.5); (c), (d) 球体(σ = 1.0); (e), (f) 椭球(σ = 3.0)
图 10 在不同转速下球体和椭球颗粒的平动动能和转动动能随时间的变化 (a), (b) 椭球(σ = 0.5); (c), (d) 球体(σ = 1.0); (e), (f) 椭球(σ = 3.0) 图 11 ωr = 30和50 r/min时球体和椭球颗粒的平动和转动动能 (a)平均平动动能; (b)平均转动动能
图 11 ωr = 30和50 r/min时球体和椭球颗粒的平动和转动动能 (a)平均平动动能; (b)平均转动动能