1.School of Mathematics and Statistics, Ningbo University, Zhejiang 315211, China 2.School of Mathematics and Statistics, Huazhong University of Science and Technology, Hubei 430074, China
Fund Project:Project supported by the Natural Science Foundation of Zhejiang Province, China (Grant No. LQ16A020001), the Scientific Research Foundation of the Education Department of Zhejiang Province, China (Grant No. Y201533808), the Natural Science Foundation of Ningbo, China (Grant No. 2016A610075), and the K.C. Wong Magna Fund in Ningbo University, China.
Received Date:26 June 2019
Accepted Date:14 September 2019
Available Online:27 November 2019
Published Online:05 December 2019
Abstract:In order to improve the computational efficiency of multiple-relaxation-time lattice Boltzmann model (MRT), a 12-velocity multiple-relaxation-time lattice Boltzmann model (iD3Q12 MRT model) for three-dimensional incompressible flows is proposed in this work by using an inversion method. This model has higher computational efficiency than the commonly used D3Q13 MRT model in principle. In numerical simulations, the accuracy and stability of iD3Q12 MRT model are validated by simulating different flows, including steady Poiseuille flow driven by pressure, unsteady pulsatile flow driven by periodic pressure and lid-driven cavity flow. We also compare the iD3Q12 MRT model with the 13-velocity multiple-relaxation-time lattice Boltzmann model(He-Luo D3Q13 MRT model).For the Poiseuille flow and pulsatile flow, the numerical solutions of the iD3Q12 MRT model agree well with the analytical solutions. In terms of accuracy, the iD3Q12 MRT model and He-Luo D3Q13 MRT model are used to simulate Poiseuille flow with different parameters. The global relative errors of the two models are identical. Similarly, we also simulate the pulsatile flow to calculate the global relative errors of flow fields at different times and different lattice spacing. It is found that the global relative errors of the iD3Q12 MRT model are smaller than those of the He-Luo D3Q13 MRT model, and both models have the second-order spatial accuracy. Furthermore, we also simulate the pulsatile flow by changing the lattice spacing or relaxation time when the maximal pressure drop of the channel is increased, and it is found that the global relative errors calculated by the iD3Q12 MRT model are smaller than those by the He-Luo D3Q13 MRT model in most cases, but the iD3Q12 MRT model diverges when the maximal pressure drop of the channel is large. This indicates that the iD3Q12 MRT model is more accurate than the He-Luo D3Q13 MRT model in simulating unsteady pulsatile flow, but less stable. For the lid-driven cavity flow, the results show that the numerical results of the iD3Q12 MRT model agree well with those given by Ku et al [Ku H C, Hirsh R S, Taylor T D 1987 J. Comput. Phys.70 439]. In terms of stability, the iD3Q12 MRT model is quantitatively less stable than He-Luo D3Q13 MRT model. Keywords:12-velocity in three dimensions/ multiple-relaxation-time/ lattice Boltzmann model/ incompressible flows
如图1所示, 三维泊肃叶流的物理空间限制在一个长方体通道中, 其长、宽、高分别为$ 0\leqslant x \leqslant l $, $ -a\leqslant y \leqslant a $, $ -b\leqslant z \leqslant b $, $ l = 2 $, $ a = b = 0.5 $, 原点O代表流体入口平面的中心. 图 1 三维泊肃叶流示意图 Figure1. The schematic of three-dimensional Poiseuille flow.
$\displaystyle\sum\nolimits_{i} $表示求和遍布每一个网格点. 模拟首先在网格数为$ 65\times33\times33 $的网格下进行, 且参数$ \nu = 0.03 $, $ \lambda_{\nu} = 1.3 $. 图2显示了在$ x = 1 $截面处z取不同值时水平速度$ u_{x} $随y变化的函数图像和在$ z = 0 $的截面处y取不同值时压力p随x变化的函数图像. 从图2可以看出iD3Q12 MRT模型在模拟稳态的泊肃叶流时所得到的数值解与已有的解析解符合得很好. 图 2 泊肃叶流数值解与解析解的对比 (a) 泊肃叶流在$x=1$截面处z取不同的值时水平速度$u_{x}$随y变化的函数图像; (b) 在截面$z=0$处y取不同的值时压力p随x变化的函数图像; 直线: 解析解; 符号: 数值解; 松弛因子$\lambda_{\nu}=1.3$ Figure2. Comparison between numerical and analytical solutions of Poiseuille flow: (a) The variation of $u_{x}$ with y for different locations of z at section $x=1$ for Poiseuille flow; (b) the variation of pressure with x for different locations of y at section $z=0$ for Poiseuille flow. Lines, analytical solutions; symbols, numerical results; the relaxation parameter ${\lambda}_{\nu}=1.3$.
表1iD3Q12 MRT和D3Q13 MRT模型在不同松弛因子${\lambda}_{\nu}$和不同空间步长下计算得到的泊肃叶流的速度场的全局相对误差${\rm GRE}_u$ Table1.The ${\rm GRE}_u$ of velocity field for Poiseuille flow computed by iD3Q12 MRT and D3Q13 MRT models under different relaxation parameters and different lattice spacings.
假设$ {\rm {GRE}}_u = a(\text{δ} x)^b (a > 0) $, 然后我们得到$ \ln({\rm {GRE}}_{\rm u}) = b\ln(\text{δ} x)+\ln(a) $. 如果$ b = 2 $, 就称数值解具有二阶精度. 用表1中的数据进行最小二乘法的线性拟合, 线性拟合的图像在图3中显示. 图中三条直线分别对应着iD3Q12 MRT模型在$ \lambda_{\nu} = 0.8, 1.0 $和1.3下的拟合直线, 它们对应的斜率分别为1.94, 1.91和1.88, 都接近2. 这说明我们提出的iD3Q12 MRT模型在模拟稳态的泊肃叶流时能够达到二阶的空间精度. 图 3 不同的$\lambda_{\nu}$下, 模拟泊肃叶流得到的速度场的全局相对误差${\rm {GRE}}_u$随空间步长$\text{δ}{x}$的变化, 符号代表数值解, 连线表示拟合直线 Figure3. The variation of ${\rm {GRE}}_u$ of velocity field with the lattice spacing $\text{δ}{x}$ at different $\lambda_{\nu}$ for Poiseuille flow. Symbols represent numerical solutions, lines represent fitting line.
表2在$\eta=2.8285$时, 不同空间步长下用iD3Q12 MRT模型和D3Q13 MRT模型模拟脉动流所得的不同时刻下的速度场的全局相对误差${\rm GRE}_u$ Table2.The global relative errors of the velocity field at different times for pulsatile flow simulated by iD3Q12 MRT and D3Q13 MRT models at different lattice spacings, $\eta=2.8285$.
Adjacent spacing
Order
Model
$T/4$
$T/2$
$3 T/4$
T
Average
1.978
1.875
1.974
1.869
iD3Q12 MRT
1.998
1.891
1.984
1.879
D3Q13 MRT
${1}/{20} \to {1}/{40}$
1.963
1.813
1.956
1.805
iD3Q12 MRT
1.994
1.838
1.972
1.821
D3Q13 MRT
${1}/{40}\to {1}/{60}$
1.983
1.891
1.979
1.885
iD3Q12 MRT
1.999
1.905
1.987
1.893
D3Q13 MRT
${1}/{60} \to {1}/{80}$
1.989
1.922
1.988
1.918
iD3Q12 MRT
2.001
1.931
1.992
1.924
D3Q13 MRT
表3相邻空间步长下的iD3Q12 MRT和D3Q13 MRT模型的空间精度的阶 Table3.The orders of the spatial accuracy of iD3Q12 MRT and D3Q13 MRT models under adjacent spacings.
图 5 同一周期四个不同时刻下变量${\rm {GRE}}_u$随空间步长$\text{δ}{x}$的变化 Figure5. The variation of ${\rm {GRE}}_u$ with the lattice spacing at four different times in a period for pulsatile flow.
表4在$\tau=0.5667$, $\eta=4.3416$, 最大压差$\Delta{p}$增大时不同的空间步长下由iD3Q12 MRT和D3Q13 MRT模型模拟的脉动流在时刻T下的速度场所计算的全局相对误差${\rm GRE}_u$, 空白处表示计算发散 Table4.The global relative error calculated by the velocity field at time T of pulsatile flow simulated by the iD3Q12 MRT and D3Q13 MRT models under different lattice spacings. The maximal pressure drop $ \Delta{p} $ of the channel increases, $\tau=0.5567$, $\eta=4.3416$ are fixed. The blank indicates that the computation is divergent.
$\Delta p$
τ
Model
0.55
0.60
0.70
0.90
$0.005 $
$1.302\times10^{-1}$
$6.311\times10^{-2}$
$2.955\times10^{-2}$
$1.744\times10^{-2}$
iD3Q12 MRT
$1.556\times10^{-1}$
$6.560\times10^{-3}$
$3.023\times10^{-2}$
$1.993\times10^{-2}$
D3Q13 MRT
$0.010$
$1.612\times10^{-1}$
$6.830\times10^{-2}$
$2.711\times10^{-2}$
$1.736\times10^{-2}$
iD3Q12 MRT
$2.435\times10^{-1}$
$8.735\times10^{-2}$
$2.661\times10^{-2}$
$2.058\times10^{-2}$
D3Q13 MRT
$0.020$
$2.475\times10^{-1}$
$9.926\times10^{-2}$
$2.624\times10^{-2}$
$1.656\times10^{-2}$
iD3Q12 MRT
$4.182\times10^{-1}$
$1.542\times10^{-1}$
$2.757\times10^{-2}$
$2.195\times10^{-2}$
D3Q13 MRT
$0.030$
$1.430\times10^{-1}$
$3.421\times10^{-2}$
$1.509\times10^{-2}$
iD3Q12 MRT
$5.482\times10^{-1}$
$2.193\times10^{-1}$
$3.616\times10^{-2}$
$2.343\times10^{-2}$
D3Q13 MRT
$0.040$
$5.001\times10^{-2}$
$1.349\times10^{-2}$
iD3Q12 MRT
$4.693\times10^{-2}$
$2.502\times10^{-2}$
D3Q13 MRT
$0.050$
$1.291\times10^{-2}$
iD3Q12 MRT
$2.674\times10^{-2}$
D3Q13 MRT
表5在${\rm{\text{δ}}} {x}={1}/{20}$时, 最大压差$\Delta{p}$增大时不同的松弛时间τ下由iD3Q12 MRT和D3Q13 MRT模型模拟的脉动流由T时刻的速度场计算得出的全局相对误差${\rm GRE}_u$, 空白处表示计算发散 Table5.The global relative error of the velocity field at time T of the pulsatile flow simulated by the iD3Q12 MRT and D3Q13 MRT models under different relaxation time τ. The maximal pressure drop of the channel is increased and ${\rm{\text{δ}}}{x}={1}/{20}$ is fixed. The blank indicates that the computation is divergent.
25.3.三维顶盖驱动的方腔流 -->
5.3.三维顶盖驱动的方腔流
三维方腔流包含旋涡运动, Ku等[41]采用伪普方法计算的结果常被用作新数值方法模拟方腔流精度的评判标准, 因此我们也采用Ku的计算结果来检验iD3Q12 MRT模型的精度. 流动是在一个立方体盒子中进行的, 如图6所示. 流体是由最顶端的盖子以常速度$ U_0 = 1.0 $移动而被驱动. 流动满足三维不可压N-S方程. 雷诺数可由$ Re = U_0 L/\nu $计算, 这里$ L = 1.0 $是立方体盒子的长度, ν是剪切黏度. 在模拟中, 初始状态的速度和压力都设置为0. 在$ z = 0.5 $的截面上, 对称的边界条件设置为 图 6 三维顶盖驱动的方腔流示意图 Figure6. The schematic of three-dimensional lid-driven cavity flow
对i和k的求和遍及所有的网格点和所有的速度方向. 首先采用iD3Q12 MRT模型模拟了Re = 100, 400和1000时的流动, 并将模拟结果与已有的Ku等[41]的结果作对比, 如图7所示. 可以看出由iD3Q12 MRT模型计算的数值结果与Ku等[41]的结果符合得很好, 因此我们提出的iD3Q12 MRT模型在模拟三维顶盖驱动的方腔流时是准确的. 图 7 不同的雷诺数下模拟方腔流, 在截面$z=0.5$处竖直和水平中心线的速度分布 (a) Re = 100; (b) $Re=400$; (c) $Re=1000$ Figure7. The velocity distribution in the vertical and horizontal center lines at section $z=0.5$ for cavity flows at different $Re$: (a) $Re=100$; (b) $Re=400$; (c) $Re=1000$.
表6不断增大雷诺数比较iD3Q12 MRT和He-Luo D3Q13 MRT模型在模拟方腔流时的稳定性. $\checkmark$代表收敛, 收敛准则是(39)式 Table6.Comparing the stability of iD3Q12 MRT and He-Luo D3Q13 MRT models for three-dimensional cavity flows when the Reynolds number is continuously increased. The tick represents convergence, the convergence criterion is formula (39).


























































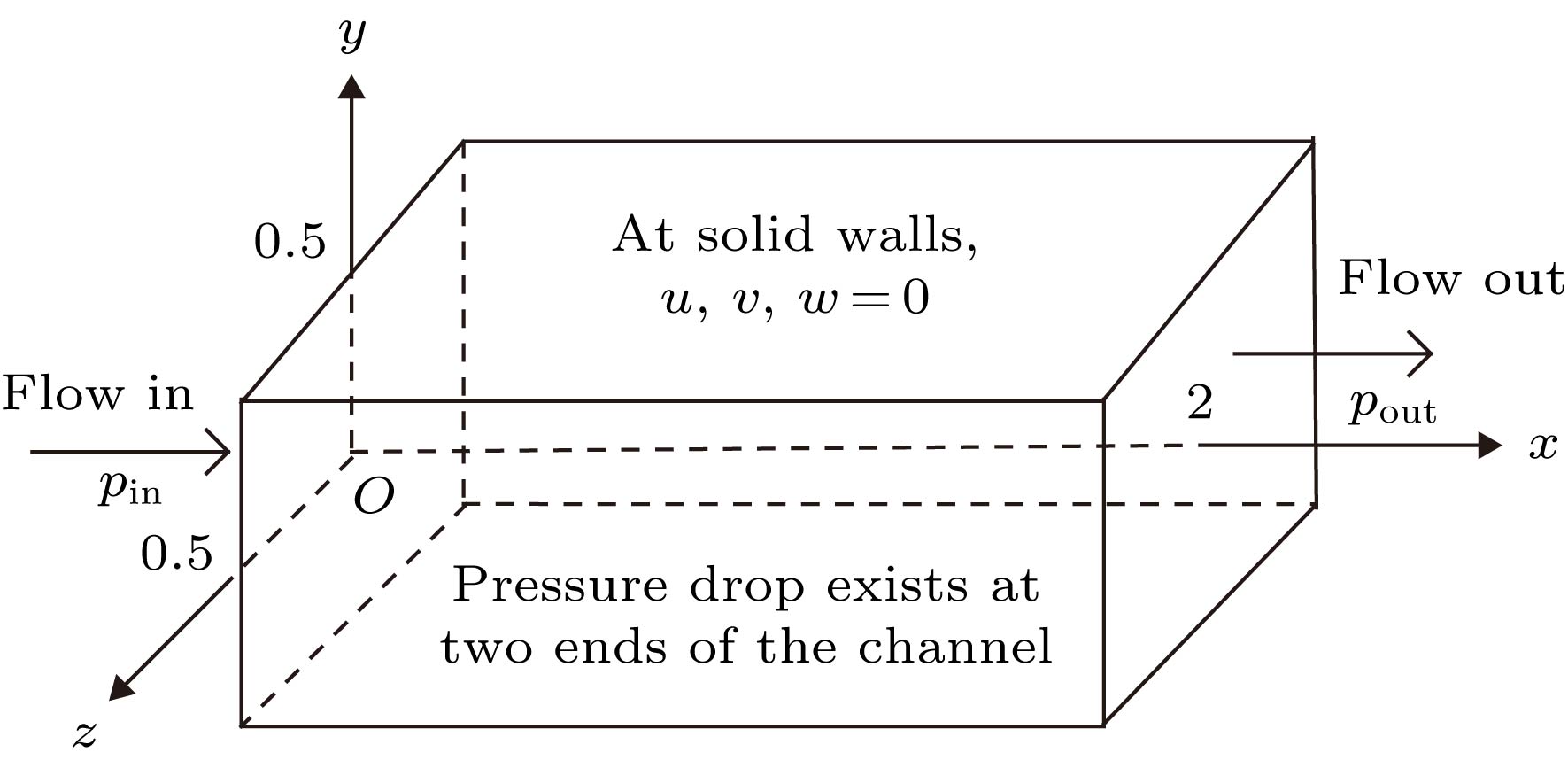 图 1 三维泊肃叶流示意图
图 1 三维泊肃叶流示意图











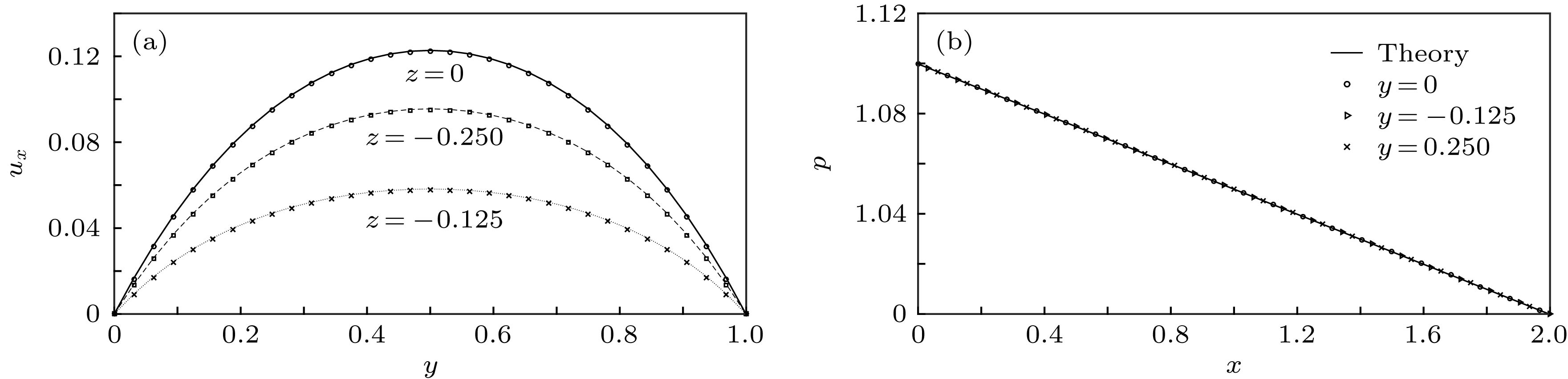 图 2 泊肃叶流数值解与解析解的对比 (a) 泊肃叶流在
图 2 泊肃叶流数值解与解析解的对比 (a) 泊肃叶流在




















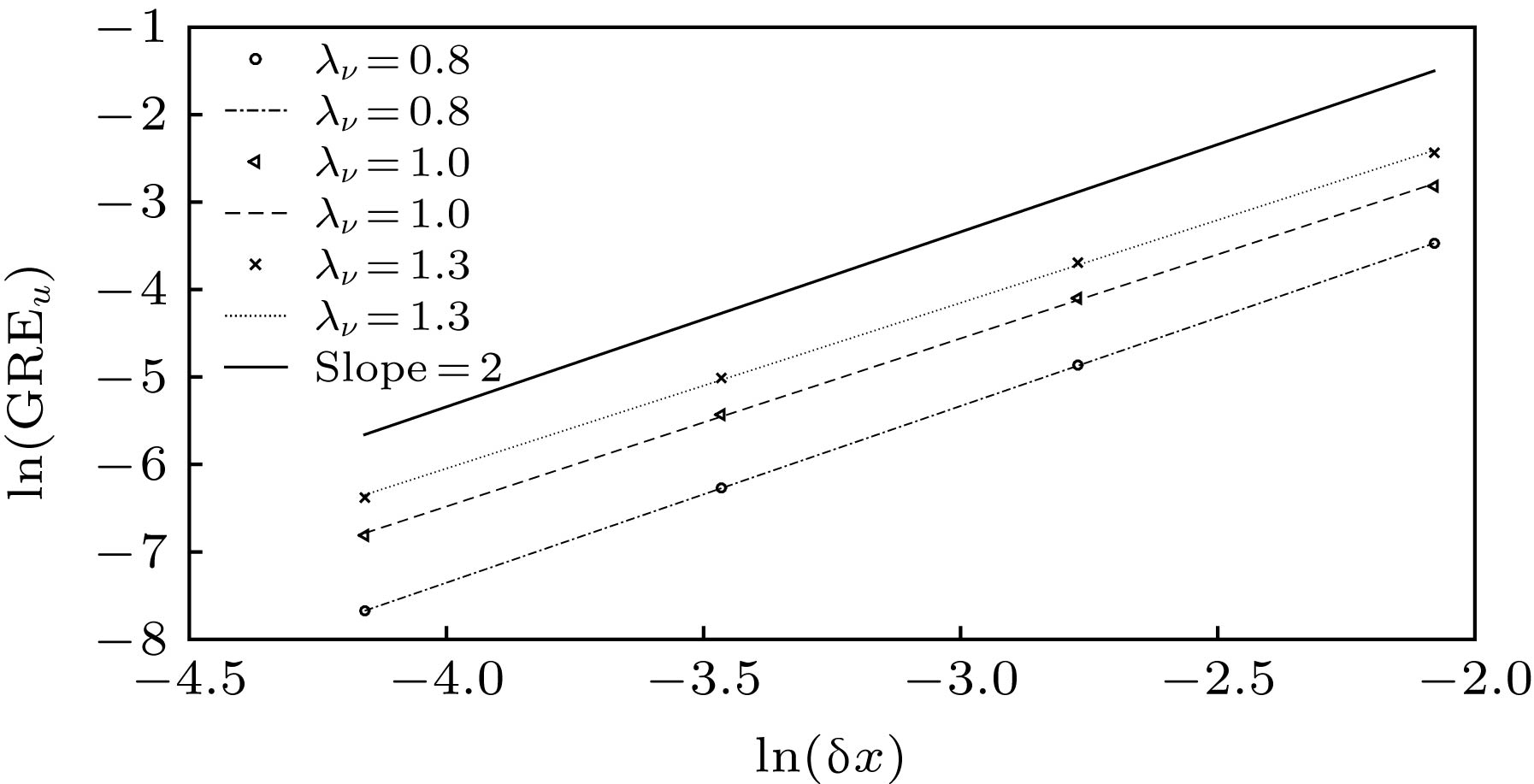 图 3 不同的
图 3 不同的






















 图 4 在
图 4 在














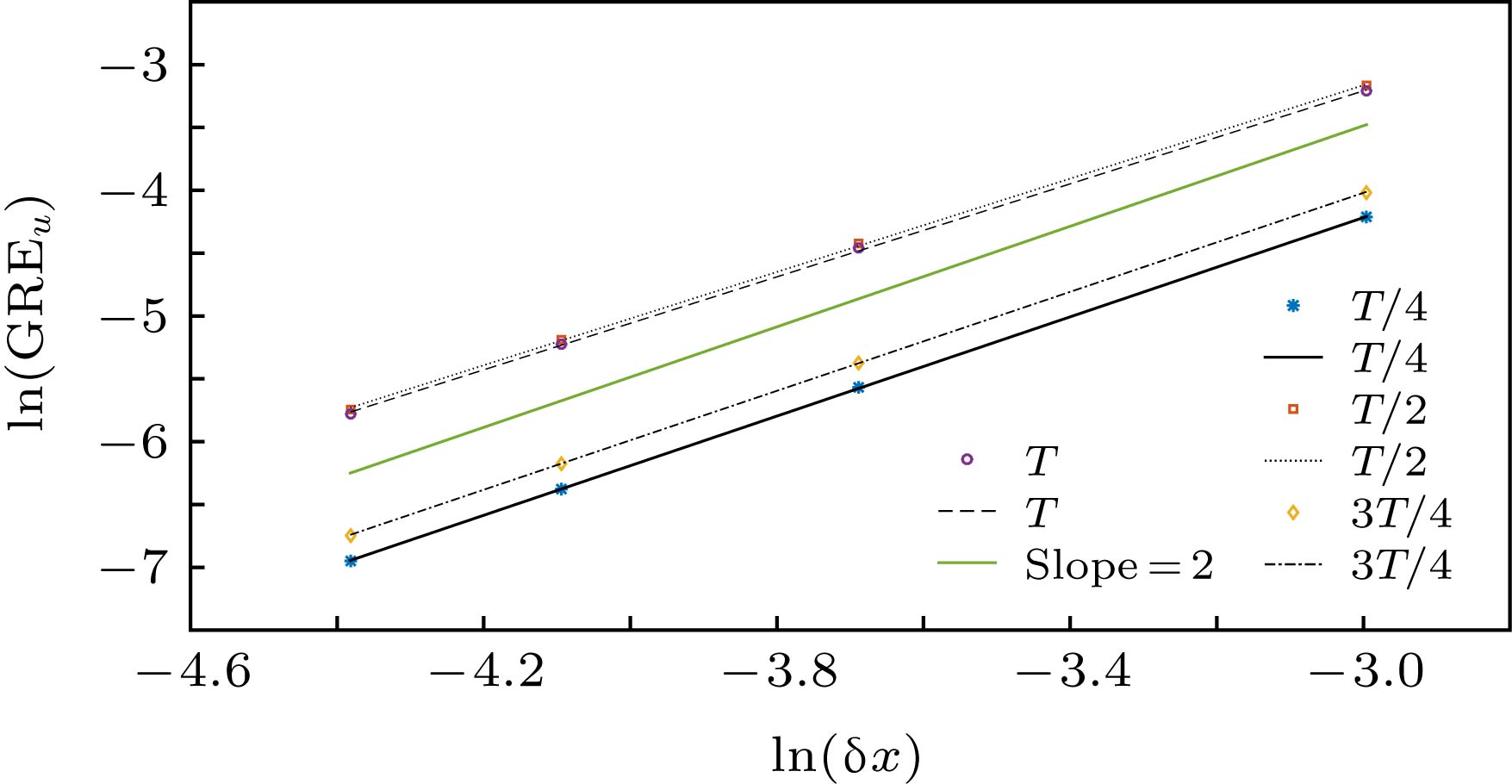 图 5 同一周期四个不同时刻下变量
图 5 同一周期四个不同时刻下变量



































 图 6 三维顶盖驱动的方腔流示意图
图 6 三维顶盖驱动的方腔流示意图










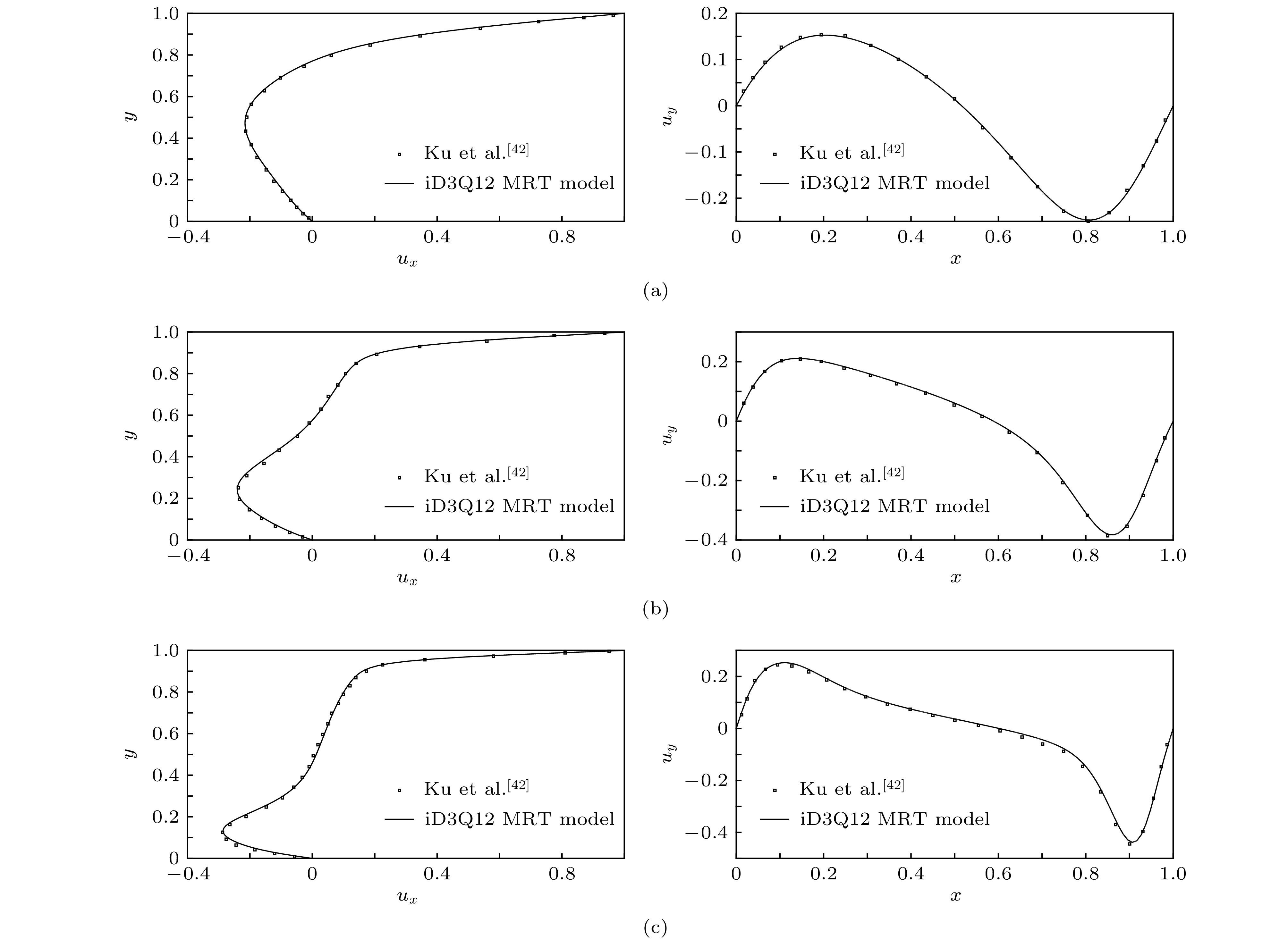 图 7 不同的雷诺数下模拟方腔流, 在截面
图 7 不同的雷诺数下模拟方腔流, 在截面











































