1.School of Information and Communication Engineering, North University of China, Taiyuan 030051, China 2.Science and Technology on Transient Impact Laboratory, Beijing 102202, China
Fund Project:Project supported by the Science and Technology on Transient Impact Laboratory, China (Grant No. 614260603030817)
Received Date:13 May 2019
Accepted Date:08 July 2019
Available Online:01 October 2019
Published Online:20 October 2019
Abstract:The light field imaging technology can realize the application of the full-focus image synthesis of the scene and the de-occlusion reconstruction of background target through the classification of the light field information of the scene. How to effectively evaluate the focus area in the image is a prerequisite for the above application. The dispersion characteristics of the defocusing point of a conventional imaging system are fundamentally different from those of the defocusing area in the refocusing image of the light field. Therefore, the evaluation criteria based on the diffusion characteristics of the defocusing point cannot be applied to the evaluation of the focus of the refocusing image of the light field. Aiming at the above problems, in this paper, starting from the principle of refocusing of light field imaging, we analyze the blurring characteristics of the defocused target image, and propose a new evaluation function of the focus of the refocusing image of the light field. Based on this, the refinement segmentation method of the focal region is studied to achieve the final focus area extraction. According to the indoor scene data set captured by the camera array of Stanford university, in this paper we use the traditional focus degree evaluation algorithm and the algorithm to evaluate the focusing degree of the foreground target potted plant in the scene and obtain the complete information about the foreground target, therefore we also study the refined segmentation algorithm. Then, in the process of refocusing the background object (CD box), the foreground light is screened out, and the reconstructed image of the specified focusing plane is obtained. Using the peak-signal-to-noise ratio and mean structural similarity index measure to evaluate the quality of the target in refocusing area, the results show that the proposed algorithm in this paper can effectively mark and separate the imaginary artifact information and ensure the high-quality focus reconstruction of the partially occluded target in the scene, which can effectively overcome the influence of the edge and texture information of the object in the scene on the defocusing area. The method presented in this work has better adaptability to the focus degree evaluation of the refocusing image of the light field. Keywords:light field imaging/ refocusing/ focuing evaluation/ segmentation
3.重聚焦图像离焦目标特征及聚焦评价函数由第2节分析可知, 光场重聚焦过程是通过调节调焦系数实现场景中指定深度物面的重建过程. 过程中多视点获取的图像序列按照(5)式进行线性平移获取去视差图像序列, 所谓的去视差是针对特定深度聚焦面目标而言, 而离焦面目标经过平移变换后仍然存在一定视差. 最终将经过去视差的图像序列进行叠加平均, 聚焦面目标得到增强而非聚焦面目标均会产生虚化. 但是该过程表现的虚化与传统成像系统的离焦过程存在较大差异, 传统成像系统中偏离聚焦平面的物点表现为一定尺寸的弥散斑, 场景中离焦目标物点所成的像彼此重叠从而导致图像变得模糊. 而数字聚焦过程中偏离聚焦平面的目标在任意视点的图像中若表现为清晰的边缘或纹理时, 由于视差的存在导致叠加后的图像对应区域的结构纹理或边缘信息仍然有突出的表现. 如图3所示, 重聚焦到不同物面时, 离焦目标区域边缘和纹理结构信息仍然保留. 离焦面区域在宏观方面表现为虚化, 但是从细节方面可以看出: 原始场景中的目标边缘或纹理信息仍然被较好地保留. 并且场景中前景目标虚化造成的模糊叠加在聚焦物面上, 形成虚化伪影. 因此采用传统成像系统的聚焦评价函数无法有效适用. 图 3 重聚焦至场景不同深度时离焦目标的虚化特征 (a) 重聚焦至前景(花为聚焦目标物); (b) 重聚焦至后景(画报为聚焦目标物) Figure3. The blurring characteristics of defocused target when refocusing to different depth of the scene: (a) Refocus to the foreground (flower is the focus object; (b) refocus to the background (pictorial is the focus object).

 图 1 光场的双平面表示方法示意图
图 1 光场的双平面表示方法示意图




 图 2 多视点合成孔径成像系统示意图
图 2 多视点合成孔径成像系统示意图







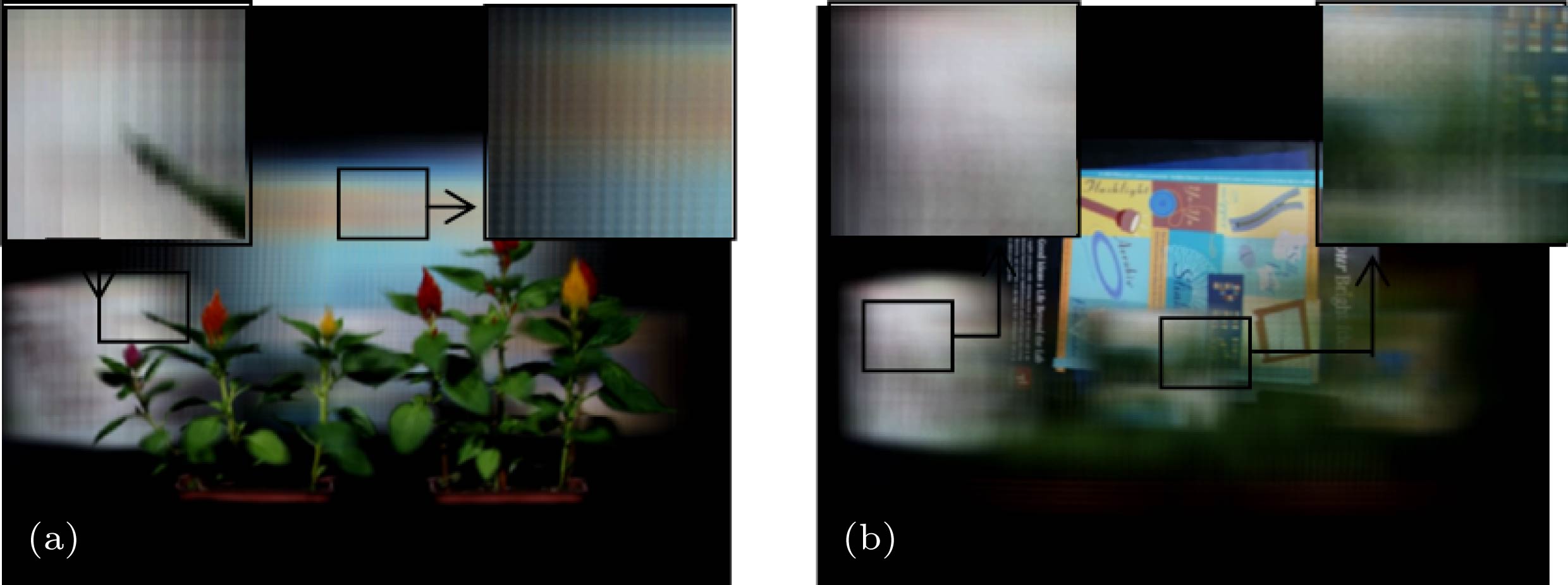 图 3 重聚焦至场景不同深度时离焦目标的虚化特征 (a) 重聚焦至前景(花为聚焦目标物); (b) 重聚焦至后景(画报为聚焦目标物)
图 3 重聚焦至场景不同深度时离焦目标的虚化特征 (a) 重聚焦至前景(花为聚焦目标物); (b) 重聚焦至后景(画报为聚焦目标物)














 图 4 传统方法与本文方法的聚焦度判别结果对比 (a)传统方法判别标记结果; (b)本文方法的判别标记结果; (c) 传统方法聚焦区域提取结果; (d)本文方法聚焦区域提取结果
图 4 传统方法与本文方法的聚焦度判别结果对比 (a)传统方法判别标记结果; (b)本文方法的判别标记结果; (c) 传统方法聚焦区域提取结果; (d)本文方法聚焦区域提取结果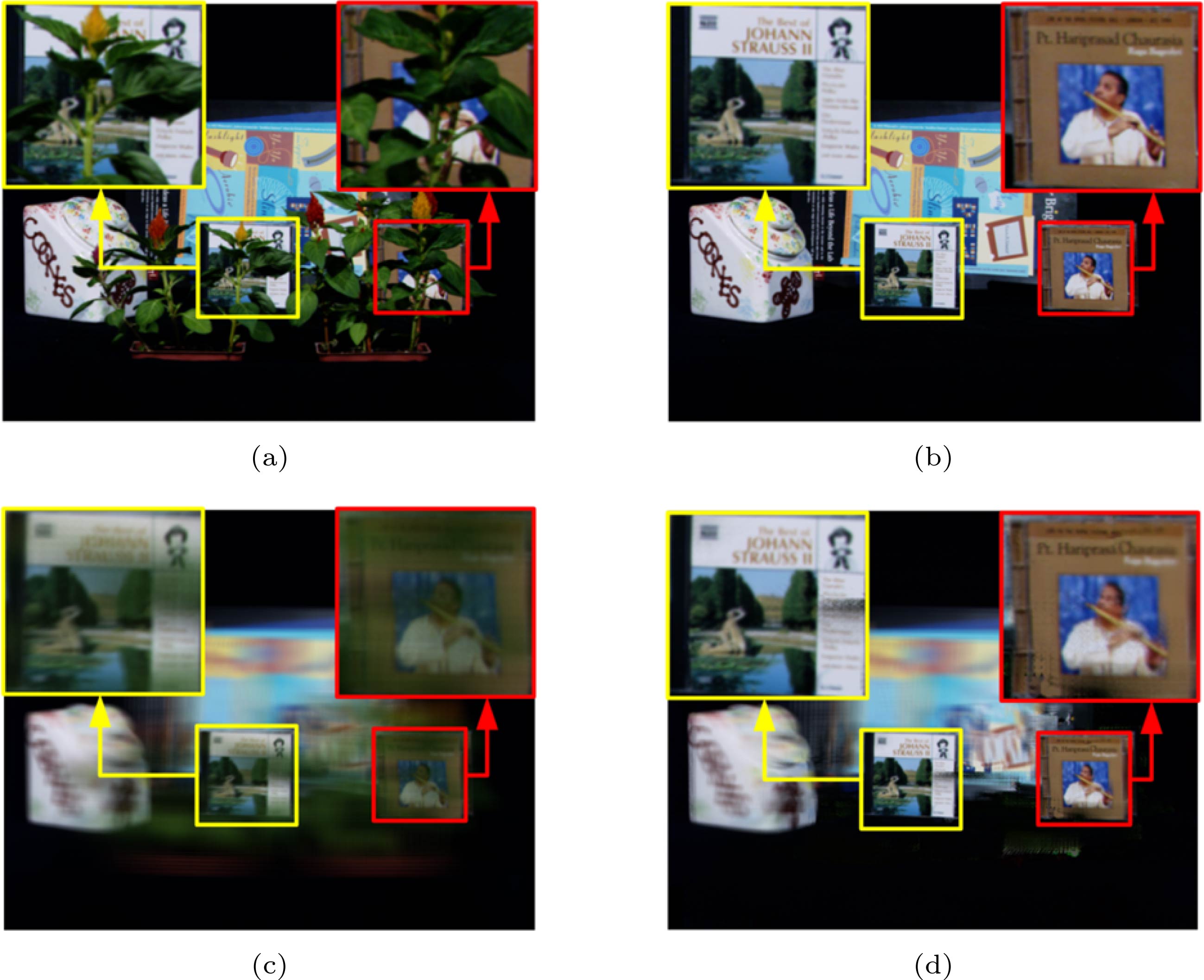 图 5 对焦至后景的光场重聚焦图像 (a)参考视点图像; (b)去除前景遮挡物的参考视点图像; (c)对焦至后景的重建图像; (d)去除前景遮挡物的重建图像
图 5 对焦至后景的光场重聚焦图像 (a)参考视点图像; (b)去除前景遮挡物的参考视点图像; (c)对焦至后景的重建图像; (d)去除前景遮挡物的重建图像