1.State Key Laboratory of Acoustics, Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China 2.University of Chinese Academy of Sciences, Beijing 100049, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 11774374)
Received Date:02 April 2019
Accepted Date:20 August 2019
Available Online:01 October 2019
Published Online:20 October 2019
Abstract:An accurate and numerically efficient numerical model is very important for studying the effect of internal wave on underwawter sound propagation. A full-wave, three-dimensional (3D) coupled-mode model is able to deal with the internal wave problem with satisfactory accuracy, but such a model is in general numerically inefficient. A numerically efficient 3D model is presented for sound propagation in a range-dependent waveguide in the presence of solitary internal waves in this work. The present model is a forward-marching model that neglects backscattering. In this 3D model, an efficient two-dimensional (2D) coupled-mode model, C-SNAP, is adopted to compute 2D acoustic field solutions excited by a line source. The C-SNAP is a 2D forward-marching model, which uses an energy-conserving matching condition to preserve accuracy. An appealing aspect of C-SNAP is that its efficiency is competitive with that of the existing parabolic equation model. The integral transform technique is used to extend C-SNAP to a 3D model, where a complex integration contour is used for evaluating the wavenumber integral. A brief review of C-SNAP and formulation of the present 3D model are given. The forward-marching models are primarily suitable for treating the range-dependent problems with weak backscattering, such as with a slowly varying bathymetry. Since in general the backscattering from internal wave is weak, which is also validated numerically in this work, the present model is able to address the problem of sound propagation through internal wave with satisfactory accuracy. At the same time, it achieves an efficiency gain of at least an order of magnitude over that of full two-way, 3D model. In addition to the internal wave, the present model is also suitable for solving the general range-dependent problems where backscattering is weak, such as in the presence of a bottom ridge of a small height. Numerical simulations are also provided to validate the present model, where a two-way, 3D model serves as the benchmark. The numerical results show that the effect of the internal wave on the acoustic field is negligible for the region between the source and the internal wave. However, the effect is significant on the other side of the internal wave. A more interesting observation is the angular dependence of the interference pattern induced by the internal wave. Keywords:three-dimensional modeling/ internal solitary wave/ coupled modes
$ c(z) = \left\{ {\begin{aligned} & {{c_1},}\quad\quad\quad\quad\quad\quad {0 \leqslant z < {z_1},}\\ & {{c_2} + \xi (z - {z_2}),}\quad {{z_1} \leqslant z < {z_2},}\\ & {{c_2},}\quad\quad\quad\quad\quad\quad {{z_2} \leqslant z \leqslant H,} \end{aligned}} \right.$
其中$ \xi = -5\;({\rm{m}}/{\rm{s}})/{\rm{m}}$为温跃层的声速梯度, c1 = 1500 m/s, c2 = 1400 m/s, $ z_1 = 20 \;{\rm{m}}$, $ z_2 = 40 \;{\rm{m}}$, $ H = 100 \;{\rm{m}}$. 海底声速, 密度和吸收系数分别为2000 m/s, 2.0 g/cm3和0.1 dB/λ. 图3给出了用于数值模拟的波导环境. 图3(a)为无孤子内波时的浅海负温跃层的声速剖面; 图3(b)给出了存在孤子内波时的声速剖面, 孤子内波波包在距声源4 km处, 其中$ A_0 = 20 \;{\rm{m}}$, $ \varDelta = 100 \;{\rm{m}}$, $ x_0 = 4 \;{\rm{km}}$; 图3(c)为同时存在孤子内波和海脊时的波导环境, 海脊在距声源6 km处. 声源和接收器的深度分别为10 m和70 m, 声源频率为25 Hz. 图 3 二维声速剖面示意图 (a)无孤子内波的声速剖面; (b)孤子内波位于4 km处的声速剖面; (c)孤子内波位于4 km处, 海脊位于6 km处的声速剖面 Figure3. Sound speed fields considered in this paper: (a) The background sound speed field; (b) in the presence of an internal wave soliton, centered at range 4 km from the source; (c) in the presence of both an internal wave soliton centered at 4 km and a cosine-bell shaped bottom ridge centered at 6 km from the source.
23.2.孤子内波问题的二维声场结果 -->
3.2.孤子内波问题的二维声场结果
图4给出在无孤子内波和存在孤子内波时DGMCM2D和C-SANP得到的两组二维声场计算结果, 其中双向耦合简正波模型DGMCM2D被用作标准模型. 从该图可以看出: 图 4 孤子内波环境下DGMCM2D和C-SNAP在70 m深度传播损失曲线 蓝色实线和红色虚线分别表示无孤子内波时DGMCM2D和C-SNAP的计算结果, 绿色和枚红色虚线分别表示孤子内波波包在4 km时DGMCM2D和C-SNAP的计算结果, 黑色虚线表示孤子内波波包位置 Figure4. Transmission loss results for the internal solitary wave problem computed by DGMCM2D and C-SNAP. The blue solid line and red dashed line are the results by DGMCM2D and C-SNAP for the case without internal waves, respectively, and the green and magenta dashed lines are the results by DGMCM2D and C-SNAP for the case with a soliton located at range 4 km, respectively. The black dashed line indicates the center of the soliton.
此处三维双向耦合简正波模型DGMCM3D被用作标准模型. 图5分别给出DGMCM3D和本文提出的三维模型在70 m深度水平面上的三维声场计算结果. 图6给出纵向距离$ y = 0 \;{\rm{km}}$, 深度$ z = 70 \;{\rm{m}}$的随距离x的传播损失曲线. 从图5和图6可以看出本文提出的三维模型的结果与DGMCM3D的结果非常一致, 表明本文提出的三维模型对内波问题具有非常高的计算精度. 此外, DGMCM3D和C-SNAP3D的计算时间分别为1616.2 min和94.45 min. 此外, 图5中在内波以远的区域发现除了与距离有关的干涉现象, 还存在明显的与角度有关的干涉现象. 图 5 70 m深度水平面上的三维传播损失结果 (a) DGMCM3D的结果; (b)本文提出的三维模型的结果, 黑色虚线代表孤子内波波包的位置 Figure5. Three-dimensional transmission loss results in the horizontal plane at depth 70 m computed by (a) DGMCM3D and (b) the present 3D model. The center location of the internal wave is indicated by dashed black lines.
图 6 纵向距离$ y = 0 \;{\rm{km}}$, 深度z = 70 m, 随距离传播的损失曲线, 蓝色实线和红色虚线分别为DGMCM3D和本文提出的三维模型的结果 Figure6. Transmission loss lines versus range along the cross-range $ y = 0 \;{\rm{km}}$ at depth z = 70 m computed by DGMCM3D (the blue, solid curve) and the present 3D model (the red, dashed curve).
23.4.同时存在孤子内波和海脊时的三维声场结果 -->
3.4.同时存在孤子内波和海脊时的三维声场结果
为了验证本模型适用于反向散射很弱的一般水平变化波导问题, 考虑孤子内波和海脊同时存在的情况. 图7是三维海底地形图, 海脊在距声源$ x = 6 \;{\rm{km}}$处, 截面形状为宽度100 m, 高度10 m的余弦函数, 海底深度可以表示为: 图 7 海底存在海脊的水平变化波导示意图 Figure7. Geometry of a range-dependent waveguide with a bottom ridge.
选择高度较小的海脊来保证反向散射可以忽略. 图8给出DGMCM2D模型和C-SNAP模型在70 m深度的随距离变化传播损失曲线, 可以看出两组计算结果基本一致, 表明海脊高度为10 m时反向散射可以忽略不计. 对于存在海底起伏的情况, 如下因素会综合影响反向散射强度: 斜坡角度、斜坡高度、斜坡海底声阻抗与海水声阻抗的比值等. 文献[20]对这个问题进行了比较详尽的讨论. 图 8 孤子内波和海脊同时存在时深度70 m处的二维传播损失结果, 其中蓝色实线为DGMCM2D结果, 红色虚线为C-SNAP结果 Figure8. Two-dimensional transmission loss results at a depth of 70 m for the problem involving a solitary internal wave as well as a bottom ridge by DGMCM2D (the blue, solid curve) and C-SNAP (the red, dashed curve).
图9分别给出DGMCM3D模型和本文提出的三维模型得到的三维声场计算结果, 可以看出两者非常一致, 表明本文提出的三维模型也适用于反向散射可以忽略的一般水平变化波导问题. 此外, DGMCM3D和C-SNAP3D的计算时间分别为4778.8 min和324.3 min. 图 9 同时存在孤子内波和海脊时深度70 m水平平面上的三维传播损失 (a) DGMCM3D结果; (b)本文提出的三维模型的结果. 黑色和红色虚线分别表示孤子内波波包和海脊中心的位置 Figure9. Three-dimensional transmission loss results in the horizontal plane at depth of 70 m in the presence of a solitary internal wave as well as a bottom ridge computed by (a) DGMCM3D and (b) the present 3D model. The center locations of the internal wave and the ridge are indicated by dashed black and red lines, respectively.
 图 1 水平变化波导(红色虚线)的阶梯近似
图 1 水平变化波导(红色虚线)的阶梯近似



























 图 2 反傅里叶变换的积分围线(圆圈代表简正波的本征值, 即水平波数)
图 2 反傅里叶变换的积分围线(圆圈代表简正波的本征值, 即水平波数)














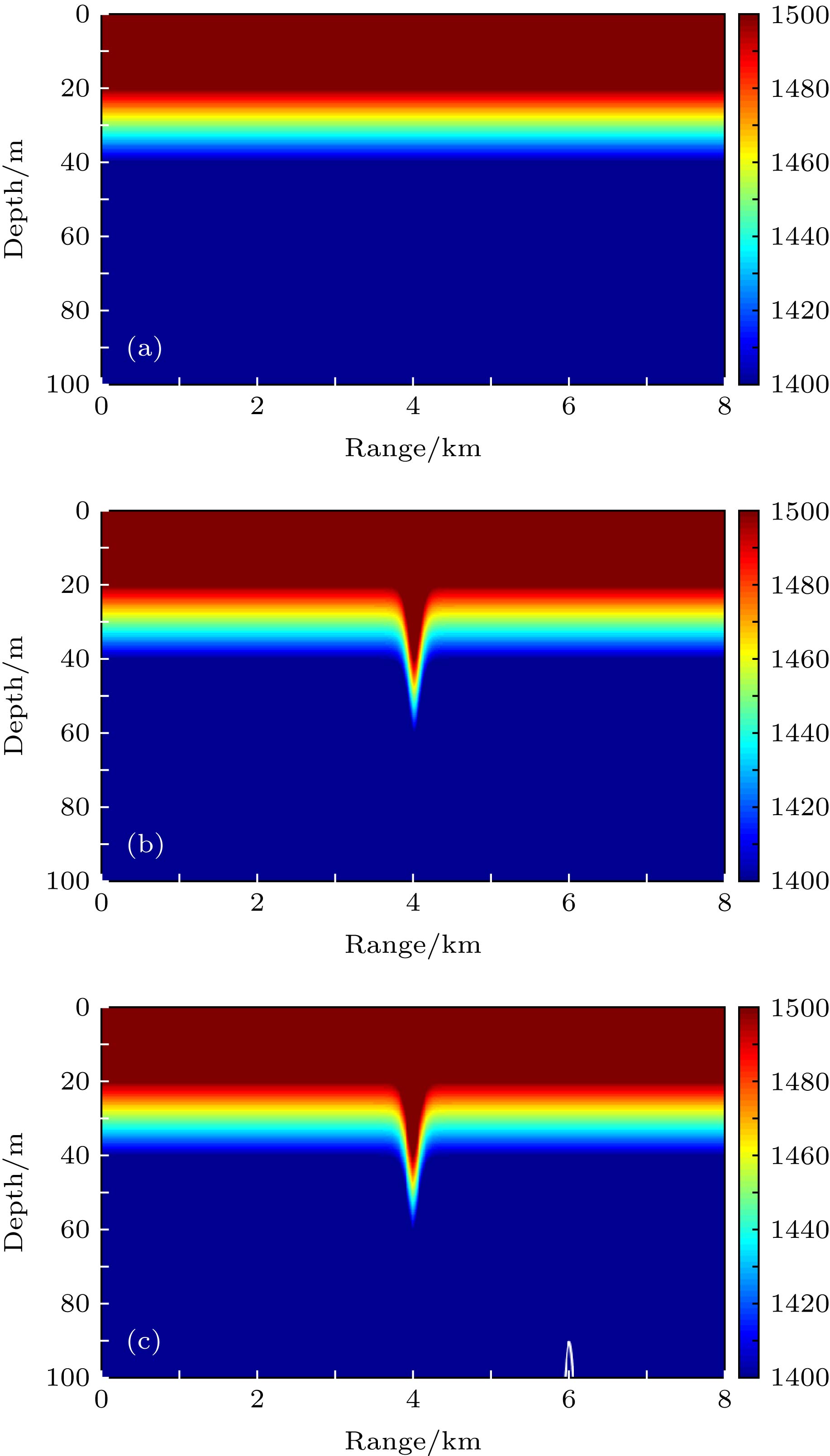 图 3 二维声速剖面示意图 (a)无孤子内波的声速剖面; (b)孤子内波位于4 km处的声速剖面; (c)孤子内波位于4 km处, 海脊位于6 km处的声速剖面
图 3 二维声速剖面示意图 (a)无孤子内波的声速剖面; (b)孤子内波位于4 km处的声速剖面; (c)孤子内波位于4 km处, 海脊位于6 km处的声速剖面 图 4 孤子内波环境下DGMCM2D和C-SNAP在70 m深度传播损失曲线 蓝色实线和红色虚线分别表示无孤子内波时DGMCM2D和C-SNAP的计算结果, 绿色和枚红色虚线分别表示孤子内波波包在4 km时DGMCM2D和C-SNAP的计算结果, 黑色虚线表示孤子内波波包位置
图 4 孤子内波环境下DGMCM2D和C-SNAP在70 m深度传播损失曲线 蓝色实线和红色虚线分别表示无孤子内波时DGMCM2D和C-SNAP的计算结果, 绿色和枚红色虚线分别表示孤子内波波包在4 km时DGMCM2D和C-SNAP的计算结果, 黑色虚线表示孤子内波波包位置

 图 5 70 m深度水平面上的三维传播损失结果 (a) DGMCM3D的结果; (b)本文提出的三维模型的结果, 黑色虚线代表孤子内波波包的位置
图 5 70 m深度水平面上的三维传播损失结果 (a) DGMCM3D的结果; (b)本文提出的三维模型的结果, 黑色虚线代表孤子内波波包的位置 图 6 纵向距离
图 6 纵向距离


 图 7 海底存在海脊的水平变化波导示意图
图 7 海底存在海脊的水平变化波导示意图 图 8 孤子内波和海脊同时存在时深度70 m处的二维传播损失结果, 其中蓝色实线为DGMCM2D结果, 红色虚线为C-SNAP结果
图 8 孤子内波和海脊同时存在时深度70 m处的二维传播损失结果, 其中蓝色实线为DGMCM2D结果, 红色虚线为C-SNAP结果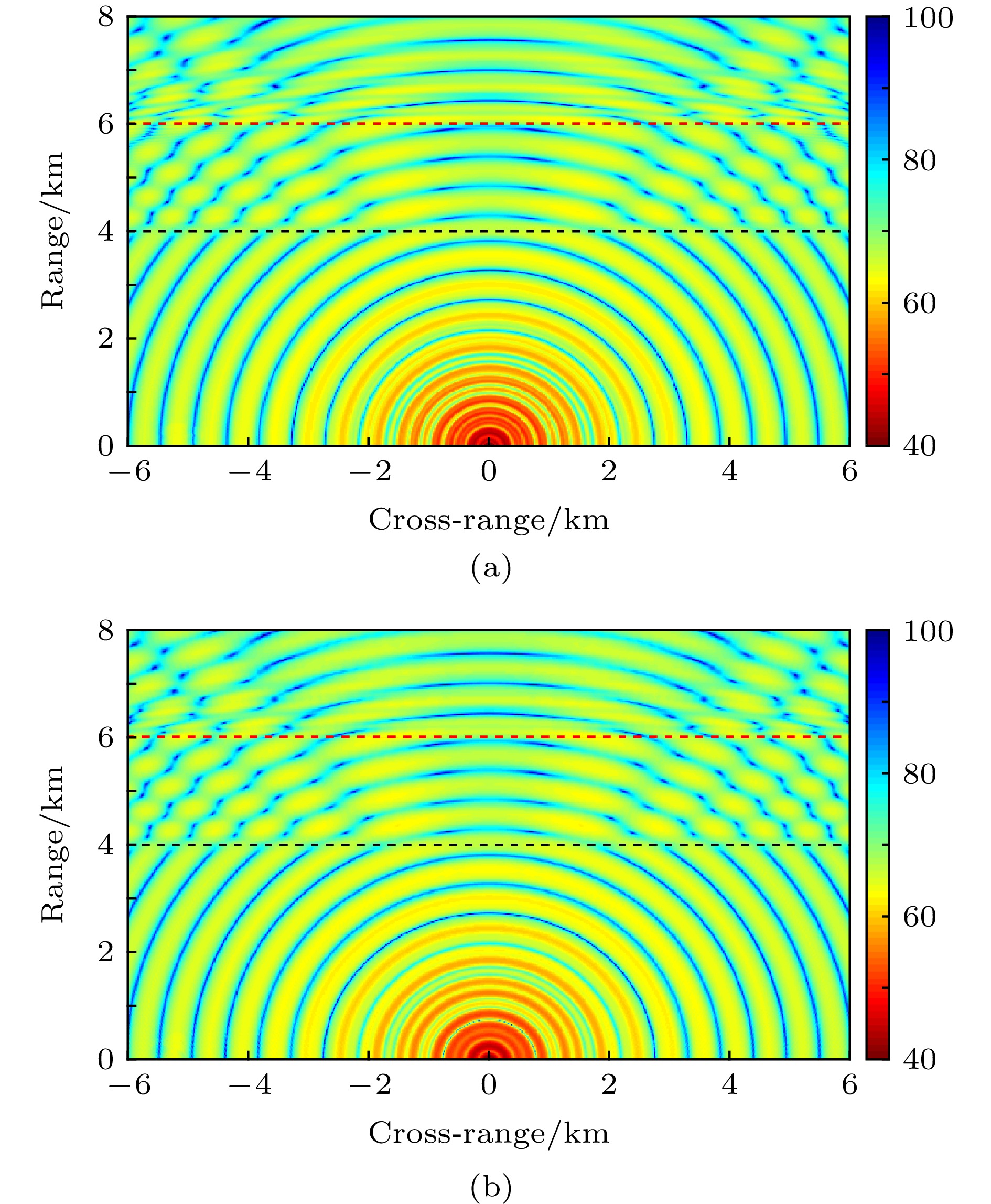 图 9 同时存在孤子内波和海脊时深度70 m水平平面上的三维传播损失 (a) DGMCM3D结果; (b)本文提出的三维模型的结果. 黑色和红色虚线分别表示孤子内波波包和海脊中心的位置
图 9 同时存在孤子内波和海脊时深度70 m水平平面上的三维传播损失 (a) DGMCM3D结果; (b)本文提出的三维模型的结果. 黑色和红色虚线分别表示孤子内波波包和海脊中心的位置