1.Key Laboratory on Adaptive Optics, Chinese Academy of Sciences, Chengdu 610209, China 2.Institute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China 3.University of Chinese Academy of Sciences, Beijing 100049, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 61875203), the Young Scientists Fund of the National Natural Science Foundation of China (Grant Nos. 11704382, 61805251), and the International (Regional) Cooperation and Exchange Program of the National Natural Science Foundation of China (Grant No. 1171101412).
Received Date:05 December 2018
Accepted Date:22 February 2019
Available Online:01 May 2019
Published Online:20 May 2019
Abstract:When laser beam propagates through the turbulent atmosphere, there are branch points in wavefront, which are caused by deep turbulence or long propagation distance. Conventional least-square reconstruction algorithms cannot restore the discontinuous wavefront, which severely limits correction performance of an adaptive optics system. If the incoming wavefront contains a branch cut, there is $ {\rm{2}}n{\text{π}} $ difference between the measured phase difference and the principle phase difference, which is the reason why conventional least-square reconstruction algorithms cannot reconstruct wavefront with branch points. The complex exponential reconstructor is developed to restore the discontinuous wavefront with phase difference replaced by complex exponents. However, thousands of iterations are required by the complex exponential reconstructor before converging to an acceptable solution. In order to speed up the iterative calculation, the cascadic multigrid method (CMG) is introduced in the process of wavefront reconstruction. The proposed method can be used to restore discontinuous wavefront with lower residual error similar to those reconstructed by the direct iteration. The number of float point multiplications required by the CMG method is nearly 2 orders of magnitude lower than that required by the direct iteration. The acceleration of the CMG method increases with the number of subapertures increasing. The performance of CMG method to recover continuous wavefront is also investigated and compared with conventional wavefront reconstruction algorithm based on successive over-relaxation. It is shown that the CMG method has good capability for wavefront reconstruction with high precision and low computation cost no matter whether it is applied to discontinuous or continuous wavefront. Furthermore, the CMG method is used in the adaptive optics for correcting the turbulence aberration. The direct slope wavefront reconstruction algorithm based on the assumption that the measured slope and the control voltage satisfy the linear relationship cannot restore the wavefront with branch points. As a result, the adaptive optics system with the CMG method doubles the correction quality evaluated by the Strehl ratio compared with that with the direct slope wavefront reconstruction algorithm. Keywords:adaptive optics/ wavefront reconstruction/ cascadic multigrid method/ branch point
利用CMG算法加速(15)式时, 夏克-哈特曼波前传感器只给出了最细网格上测量相位差, 粗网格相位差需通过细网格数据降采样得到, 降采样过程如图3所示. 图3(a)中实心点表示细网格上光场, 图3(b)中实心点表示粗网格上光场, 圆圈表示剔除的细网格光场. 粗网格上相位差复指数表示为细网格上相邻复指数相乘, 即 图 3 CMG算法降采样过程 (a)细网格上光场; (b)粗网格上光场 Figure3. Downsampling process of the CMG method: (a) Data on the fine network; (b) data on the coarse network.
其中, $\varphi _1^x$,$\varphi _2^x$,$\varphi _1^y$,$\varphi _2^y$为细网格上x, y方向测量相位差, x1, x2, y1, y2为细网格上相位差复指数, ${\omega _{x1}}$,${\omega _{x2}}$,${\omega _{y1}}$,${\omega _{y2}}$为测量相位差权值. $\Delta {u_{x{\rm{c}}}}$,$\Delta {u_{y{\rm{c}}}}$为粗网格上相位差复指数, ${\omega _{x{\rm{c}}}}$,${\omega _{y{\rm{c}}}}$为粗网格上相位差权值. CMG算法插值过程如图4所示, 图4(a)中实心点表示粗网格光场, 空心点表示插值得到的细网格光场. 图4(b)中, ${u_1}$,${u_2}$,${u_3}$,${u_4}$四个粗网格数据组成一个正方形, 正方形中心点处光场通过多路加权平均得到, 即 图 4 CMG算法插值过程 (a)细网格光场和粗网格光场的关系; (b)待插值数据位于正方形中心; (c), (d)待插值数据位于正方形四边上 Figure4. Interpolation process of the CMG method: (a) The relationship between grid points on coarse network and fine network; (b) the new grid point located at the center of the unit square; (c), (d) the new grid point located on the edge of the unit square.
4.CMG算法波前复原性能图5(a)—图5(d)给出了四种包含不同相位奇点的波前分布, 分别用Phase1, Phase2, Phase3和Phase4表示. Phase1, Phase2中包含一个正相位奇点, Phase3中有两个正相位奇点, Phase4包含一正一负两个相位奇点. 波前传感器子孔径数目等于20 × 20时, 图5(e)—图5(h)给出了最小二乘法波前复原结果, 图5(i)—图5(l)给出了复指数波前复原算法结果, 仿真中波前传感器探测噪声为零, 有效通光口径内的相位差权值为1, 通光口径外的相位差权值为0. 由图5中波前分布可知, 最小二乘法不能重建相位奇点, 利用复指数波前复原算法重建的相位中包含相位奇点和枝切线, 但枝切线位置和输入波前存在偏差. 如文献[15]和文献[16]所述, 枝切线为正负相位奇点的连线或相位奇点和边线的连线, piston像差会使枝切线位置发生变化, 实际系统中不考虑piston像差对复原结果的影响, 去除piston像差后, 复指数波前复原算法波前复原残差为0.019λ, 0.030λ, 0.018λ和0.016λ. 图 5 (a)?(d) Phase1, Phase2, Phase3和Phase4二维分布; (e)?(h)最小二乘法波前复原结果; (i)?(l)复指数波前复原算法结果 Figure5. (a)?(d) Two-dimensional distribution of Phase1, Phase2, Phase3 and Phase4; (e)?(h) wavefront reconstructed by the least-squares reconstruction algorithm; (i)?(l) wavefront reconstructed by the CER algorithm.
不同子孔径数目时, 直接迭代和CMG算法波前复原残差如图6(a)—图6(c)所示. 子孔径数目等于20 × 20, 40 × 40, 80 × 80时, CMG算法分别选用3层、4层、5层网格加速迭代计算. 如图6所示, 两种算法波前复原残差RMS值最大相差0.005λ, 两种波前复原算法都能有效复原带有相位奇点的波前, 且波前复原精度相近. 图 6 直接迭代和CMG算法波前复原残差 (a)子孔径数目为20 × 20; (b)子孔径数目为40 × 40; (c)子孔径数目为80 × 80 Figure6. Wavefront residual error of the direct iteration method and the CMG method, the number of subapertures is (a) 20 × 20; (b) 40 × 40; (c) 80 × 80.
直接迭代和CMG算法复原Phase1, Phase2, Phase3和Phase4所需浮点乘运算数目如图7(a)—图7(c)所示. 子孔径数目为20 × 20时, 直接迭代过程重建Phase1, Phase2, Phase3和Phase4所需浮点乘运算数约为106. 此时, CMG算法大约需要2 × 104次浮点乘运算即可得到相近复原精度的结果, 其所需浮点乘数相比直接迭代下降近2个数量级. 子孔径数目为80 × 80时, 直接迭代过程所需浮点乘数的数量级为108, 而CMG算法所需浮点乘数的数量级约为105, CMG算法所需浮点乘数相比直接迭代过程下降近3个数量级. 图 7 CMG算法和直接迭代过程所需浮点乘运算数目(a)子孔径数目为20 × 20; (b)子孔径数目为40 × 40; (c)子孔径数目为80 × 80 Figure7. Float point multiplications required by the CMG method and the process of the direct iteration the number of subapertures is (a) 20 × 20; (b) 40 × 40; (c) 80 × 80.
不同Rytov方差时, 自适应光学系统校正前后远场光强分布如图10所示, 图上数字为峰值Strehl比. 比较图中数据可以发现, 经自适应光学系统校正后, 远场光强能量更加集中, 采用CMG算法的自适应光学系统校正效果优于采用直接斜率法的系统. 图10中不同Rytov方差的波前中包含相位奇点数目为50, 98, 120, 126, 136, 随着Rytov方差增大, 波前中相位奇点数目增多, 自适应光学系统校正效果下降. 图 10 不同Rytov方差时, 自适应光学系统校正前后远场光强分布及其峰值Strehl比 Figure10. Far field intensity and Strehl ratio of laser beam before and after corrected by the adaptive optics system.
不同Rytov方差时, 自适应光学系统校正前后Strehl比平均值如图11所示, 图中结果由20次仿真数据得到. 由图11数据可知CMG算法波前复原效果优于直接斜率法, Rytov方差大于0.4时, 自适应光学系统采用CMG算法后校正光束Strehl比相比采用直接斜率法的系统提升1倍. 出现这种差异的原因在于直接斜率法基于测量斜率和控制电压满足线性方程这一假设计算控制电压, 不能复原相位奇点, 而CMG算法能够重建相位奇点, 从而提升自适应光学系统校正效果. 图 11 不同Rytov方差时, 自适应光学系统校正光束Strehl比 Figure11. Strehl ratio of laser beam after corrected by the adaptive optics system in different Rytov number.





















 图 1 测量相位差和重建相位点的关系
图 1 测量相位差和重建相位点的关系
























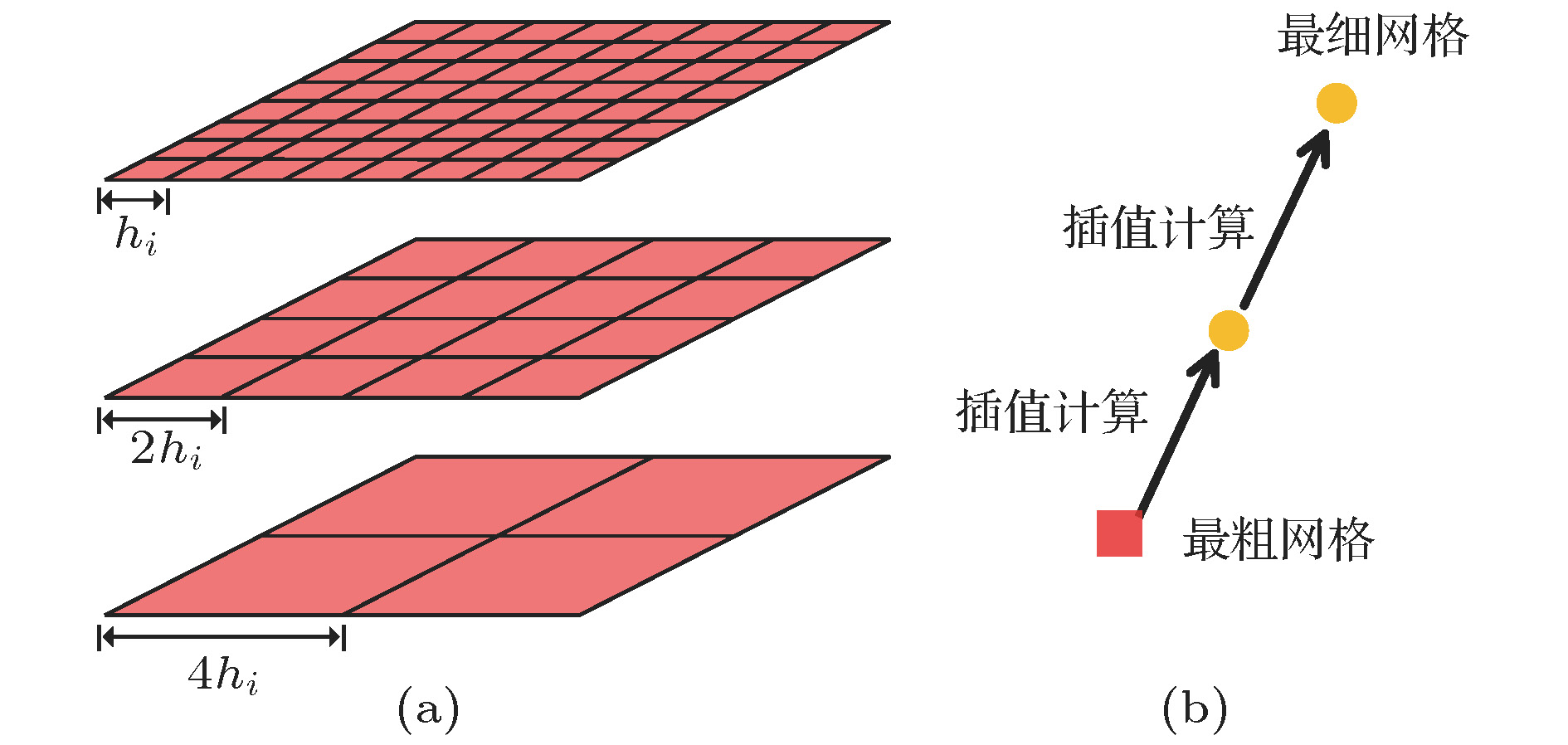 图 2 瀑布型多重网格法示意图 (a)网格结构; (b)CMG算法计算流程
图 2 瀑布型多重网格法示意图 (a)网格结构; (b)CMG算法计算流程 图 3 CMG算法降采样过程 (a)细网格上光场; (b)粗网格上光场
图 3 CMG算法降采样过程 (a)细网格上光场; (b)粗网格上光场















 图 4 CMG算法插值过程 (a)细网格光场和粗网格光场的关系; (b)待插值数据位于正方形中心; (c), (d)待插值数据位于正方形四边上
图 4 CMG算法插值过程 (a)细网格光场和粗网格光场的关系; (b)待插值数据位于正方形中心; (c), (d)待插值数据位于正方形四边上
















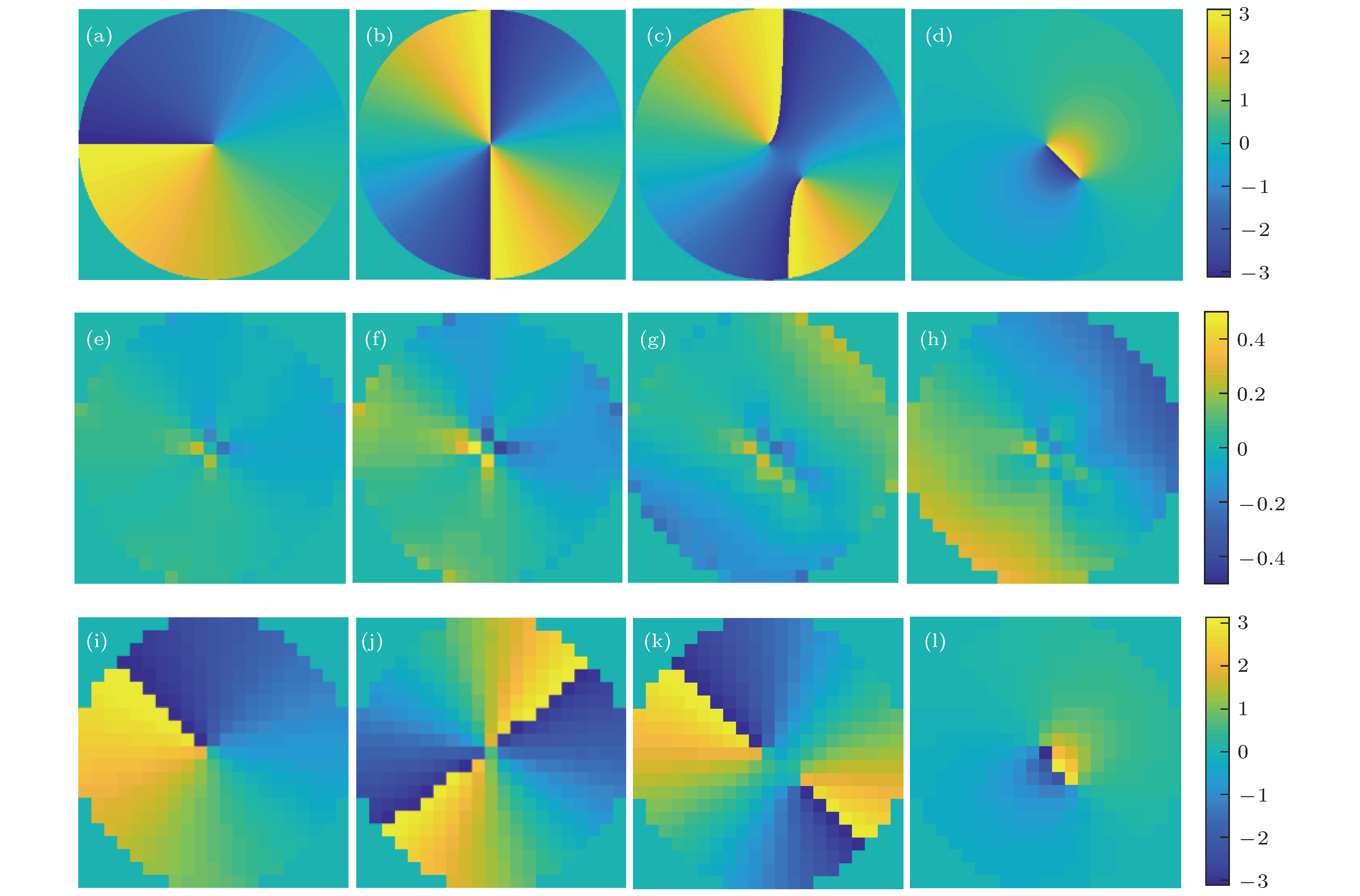 图 5 (a)?(d) Phase1, Phase2, Phase3和Phase4二维分布; (e)?(h)最小二乘法波前复原结果; (i)?(l)复指数波前复原算法结果
图 5 (a)?(d) Phase1, Phase2, Phase3和Phase4二维分布; (e)?(h)最小二乘法波前复原结果; (i)?(l)复指数波前复原算法结果 图 6 直接迭代和CMG算法波前复原残差 (a)子孔径数目为20 × 20; (b)子孔径数目为40 × 40; (c)子孔径数目为80 × 80
图 6 直接迭代和CMG算法波前复原残差 (a)子孔径数目为20 × 20; (b)子孔径数目为40 × 40; (c)子孔径数目为80 × 80 图 7 CMG算法和直接迭代过程所需浮点乘运算数目(a)子孔径数目为20 × 20; (b)子孔径数目为40 × 40; (c)子孔径数目为80 × 80
图 7 CMG算法和直接迭代过程所需浮点乘运算数目(a)子孔径数目为20 × 20; (b)子孔径数目为40 × 40; (c)子孔径数目为80 × 80 图 8 CMG算法和SOR算法波前复原残差统计结果
图 8 CMG算法和SOR算法波前复原残差统计结果


 图 9 变形镜驱动器和哈特曼波前传感器子孔径匹配关系
图 9 变形镜驱动器和哈特曼波前传感器子孔径匹配关系

 图 10 不同Rytov方差时, 自适应光学系统校正前后远场光强分布及其峰值Strehl比
图 10 不同Rytov方差时, 自适应光学系统校正前后远场光强分布及其峰值Strehl比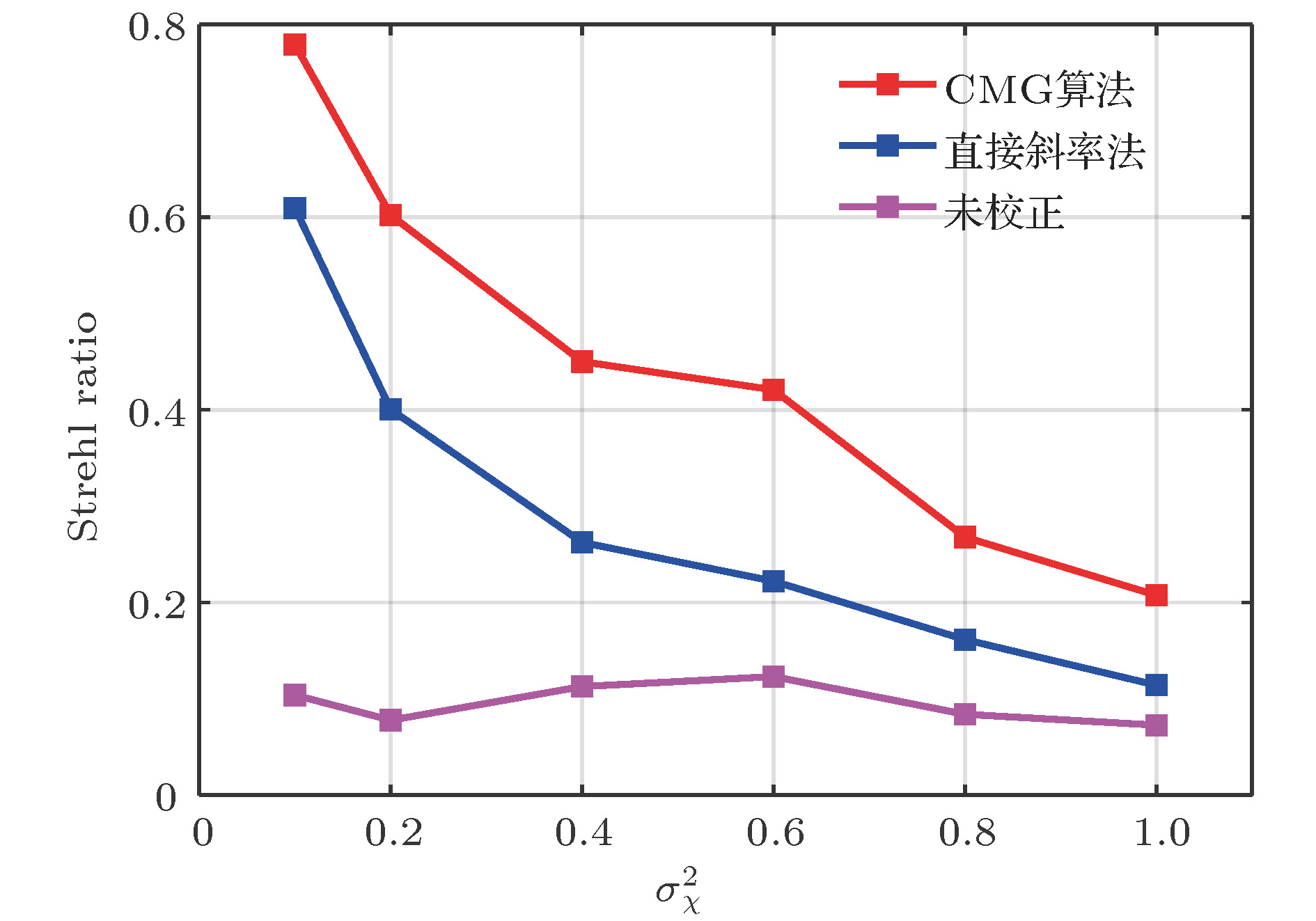 图 11 不同Rytov方差时, 自适应光学系统校正光束Strehl比
图 11 不同Rytov方差时, 自适应光学系统校正光束Strehl比